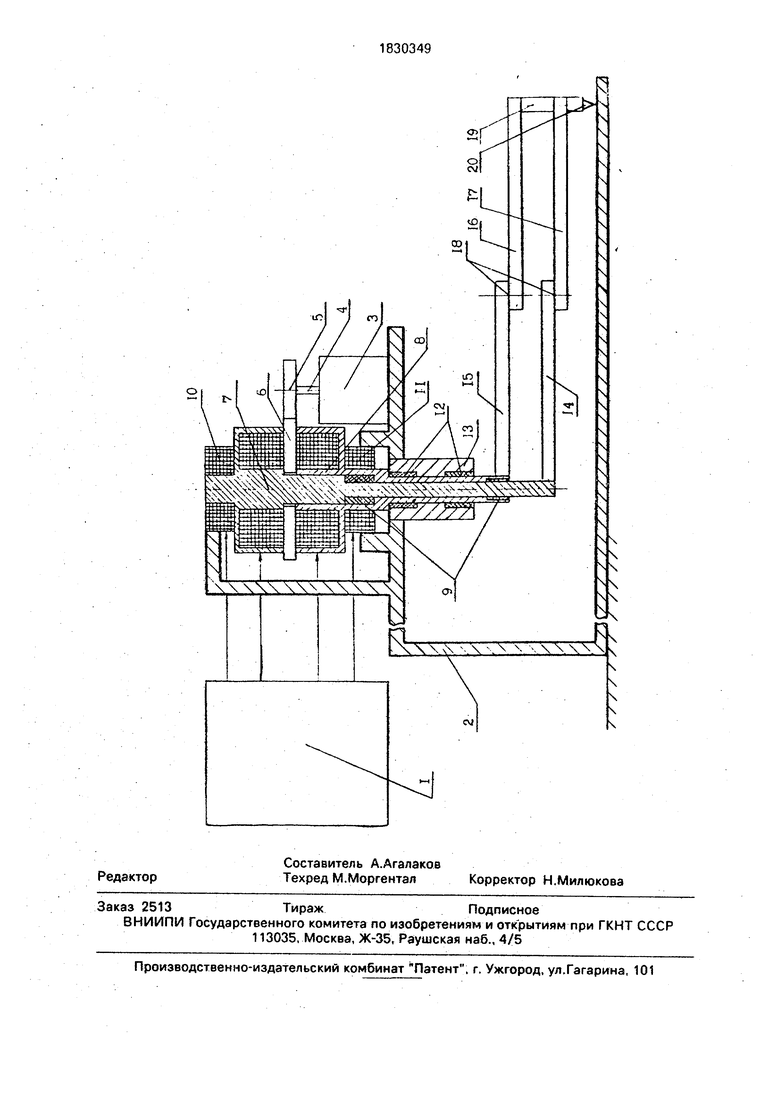
Вал-полумуфта 7 установлен в полом валу- полумуфте 8 посредством подшипников скольжения 9 таким образом, что зубчатое колесо б расположено между электромагнитными полумуфтами валов-полумуфт 7.8. Со стойкой 2 жестко соединены электромагнитные тормоза 10,11, причем тормоз 10 кинематически связан с валом-полумуфтой 7, а тормоз 11 - с валом-полумуфтой 8. Тормоза 10,11, также как и полумуфты валов-полумуфт 7,8, электрически связаны с блоком управления 1. Вал-полумуфта 8 установлен посредством подшипников скольжения 12 во втулке 13, жестко связанной со стойкой 2. На валу-полумуфте 7 жестко закреплен кривошип 14, а на валу-полумуфте 8 - кривошип 15. Таким образом, кривошипы 14,15 связаны через валы-полумуфты 7,8 с тормозами 10,11 соответственно. Кривошипы 14.15 связаны с шатунами 16.17 посредством вращательных шарниров 18. Шатуны 16,17 свободными концами соединены между собой с помощью вращательного шарнира 19, в котором установлен пишущий элемент 20.
Устройство работает следующим образом.
Вал 4 двигателя 3, посредством шестерни 5 вращает с постоянной угловой скоростью зубчатое колесо 6. Сигналы, поступающие с блока управления 1, заставляют работать вал-полумуфты 7,8 и тормоза 10,11. В результате этого пояумуфты залов- полумуфт 7,8 обеспечивают передачу вращательного движения с зубчатого колеса б на кривошипы 14,15, Тормоза 10,11 осуществляют фиксацию валов -полумуфт 10,11 относительно стойки 2.
Устройство работает в четырех режимах: при первом режиме работают вал-полу- му.фта 7 и тормоз 10; при втором - вал-полумуфта 8 и тормоз 11; при третьем - валы-полумуфты 7(8; при четвертом-тормоза 10.11. При работе устройства в первых двух режимах попеременно вращаются на определенные углы, зависящие от длительности и скважности управляющего сигнала, кривошипы 14,15, тем самым задавая движение шатунами 16,17, которые в свою очередь перемещают пишущий элемент 20. При работе устройства в третьем режиме кривошипы 14,15 вращаются одновременно в одну сторону, также обеспечивая передачу движения пишущему элементу 20. При работе устройства в четвертом режиме кривошипы 14, 15 фиксируются относительно стойки 2 без остановки двигателя 3, что обеспечивает технологическую возможность, например, замены заготовок, Пишущий элемент 20 вычерчивает заданную кривую на рабочей плоскости заготовки.
Переход на воспроизведение кривых другого вида осуществляется путем изменения длительности и скважности управляющих сигналов, генерируемых блоком управления 1. Устройство для вычерчивания кривых обладает следующими преимуществами. Оно характеризуется более широкими эксплуатационными возможностями за счет исключения мертвых зон вследствие размещения двигателя и системы привода (включающей валы-полумуфты, тормоза, механизм передачи вращательного движения) вне рабочей зоны исполнительного механизма, а также за счет применения электронной системы управления, позволяющей более оперативно и точно переходить на воспроизведение кривых .нового типа, значительно упростить работу
оператора. Кроме того, устройство имеет меньшие габаритные размеры за счет использования в его конструкции типового двигателя с валом, имеющим один выход, а также за счет использования одной электромагнитной муфты.
Формула изобретения Устройство для вычерчивания плоских кривых, содержащее смонтированный на стойке двигатель, пишущий элемент и средство для соединения его с двигателем, вклю- чающее два соосно установленных кривошипа, два шатуна, связанных одним концом между собой шарниром, на котором установлен пишущий элемент, и каждый из
которых вторым концом соединен с одним из кривошипов, причем механизм кинематической связи каждого из кривошипов с двигателем включает электромагнитную муфту и тормоз, отличающееся тем,
что, с целью расширения эксплуатационных возможностей путем увеличения зоны обслуживания, муфты механизма кинематической связи кривошипов с двигателем выполнены в виде двух концентрично расположенных валов, один из которых полый, при этом муфта и тормоз механизма кинематической связи каждого кривошипа с двигателем установлены на одном из валов, а каждый из тормозов и полый вал жестко
связаны со стойкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для вычерчивания плоских кривых | 1990 |
|
SU1733271A1 |
| Устройство для вычерчивания гармонических кривых | 1980 |
|
SU878605A1 |
| Устройство для вычерчивания кривых | 1989 |
|
SU1664593A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1991 |
|
RU2011847C1 |
| Устройство для вычерчивания кривых | 1989 |
|
SU1680587A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КРИВЫХ | 1971 |
|
SU435147A1 |
| Прибор для вычерчивания кривых | 1987 |
|
SU1447711A1 |
| Прибор для вычерчивания кривых конических сечений | 1977 |
|
SU676475A1 |
| Механизм для воспроизведения виртуальной параболы Крамера | 1983 |
|
SU1094758A1 |
| Привод перемещения исполнительного органа прецизионной делительной машины | 1973 |
|
SU776865A1 |