1
Изобретение относится к прецизионным делительным машинам, используемым для профилирования штрихов дифракционных решеток алмазным резцом.
Известны приводы перемещения исполнительных органов прецизионных делительных машин, содержащие два кривошипно-шатунных механизма, кривошипы которых развернуты друг относительно друга, расположенных на одном приводном валу, кинематически связанных через рейки с зубчатыми колесами, и муфту, управляемую датчиком .
Недостатком известных приводов является то, что с их помощью невозможно обрабатывать сразу две решетки за один рабочий ход исполнительного .
Цель изобретения - улучшение качества при одновременной обработке двух дифракционных решеток.
Для зтого привод снабжен выходным валом, на концах которого расположены упомянутые зубчатые колера, дополнительной муфтойГ с датчиком и гибким элементом, для взаимодействия с выходным валом через основную и дополнительную муфты.
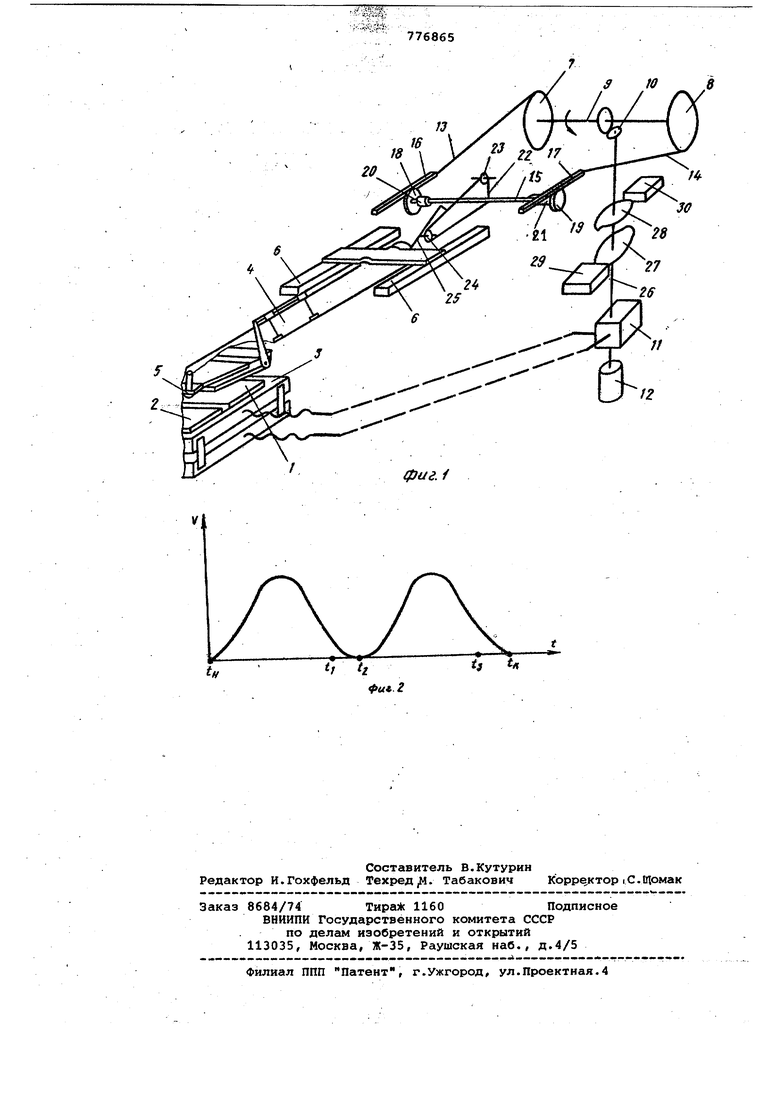
На фиг.1 изображена кинематичес;кая схема предлагаемого привода; ва
фиг.2 - график скоростей движения исполнительного органа.
Нарезаемые дифракционные решетки 1 и 2 устанавливаются на делительном 5 столе 3.
ч
Привод перемещения исполнительного органа 4 резцовой балки), несущей алмазный резец 5 по прямолиней 0 ным направляющим 6, содержит два кривошипно-шатунных механизма, кривошипы 7 и В которых с взаимным смещением по фазе на 180 установлены на приводном валу 9, соединенном через коническую пару 10 и редуктор 11 с валом электродвигателя 12. Шатуны 13, 14 связаны с выходным валом 15 посредством кинематических передач, каждая из которых образована,например, рейками 16,17 и зубчатыми колесами 18 и 19.Соединение зубчатых колес 18,19 с выходным валом осуществляется посредством отключаемых муфт 20,21. Привод содержит также систему
25 преобразования вргицательно-качательного движения выходного вала 15 в возвратно-поступательное движение резцовой балки 4. Эта система выпол.нена в виде гибкой связи, образованной нитью 22, пропущенной по замкнутому контуру через ролики 23,24 и выходной вал 15, и тягой 25. На валу 26 между редуктором 11 и конической парой 10 установлены два датчика положения кривошипов 7 и 8, выйолнённые, например, в виде двух кулачков 27,28, взаимодействующих сдвумя датчиками 29,30, которые являйтся элемен тами системы управления муфтами. Кулачки 27,28 ориентированы на валу 26 таким образом, чтобы фиксировать крайние положения кривсяаипно-шатунных механизмов 7,13 и 8,14 соответственно., Принцип работы предлагаемого исполнительного органа заключает ся в следующем. Вращение вала электро двигателя 12 передается редуктору 11, который,помимо вращения вала 26, може Шйевр1МёйГо осущёетвлять перемещение делительного стола 3 с нарезаемыми решетками 1,2. Вращение вала 26 через коническую пару 10 передается приводному валу 9 и кривошипам 7,8, которые прёобраэуйт вращательное дйиженИе с помощью шатунов 13,14 и реек 16,17 в Воэвратнр-качательное движение зубчатых колес 18,19. 1.. Поскольку кривошипы 7,8 взаимно смещены по фазе на ISO, то вращение колес 18 и 19 Пройс годит в противоположных направлениях. В начале рабочего xoдa(t) исполнительный орган 4 находится в крайнем Tfplf6Krw ibiic a«7 чгб еегбтвеус-гвует крайнему пр§:ёбг11 1 ЬЖ ЖёнШб фйвО1ййпно шатунйого механизма 7,13. В siтот момент включена муфта 2О, т;ё. ймходной вал 15 соединен с зубчатым колесом 18 При дальнейшем вращении кривошипа 7 рейка 16 будет перемещаться влево и это движение через выходной вал 15 и гибкую связь .22 - 25 nepeifSe-fGff vicnon нительному органу 4. Одновременно про исходит опускание резца 5 назаготовку. Нарезание штриха на решетке 1 при движении исполнительного органа 4 по направляющим 6 будет происходить, пока кшивошип 7 не приблизится к крайне му левому положению.. Благодаря исполь зованию кривошипно-шатунного механизйа, скорость исполнительного органа пДавНд йзмёййётся от нуля ЙЬ максимума и снова до нуля. При подходе кривошипа 7 к крайнему левому положению в момент t , резец 5 поднимается от заготовки ре.шетки 1. При этом исполнительный орfciH, уменьшая свою скорость до нуля, будет двигаться дальше до места начала штриха на заготовке решетки 2. В крайнем левом положении кривошипа 7в момент t, с помощью кулачка 27 датчика 29 и муфты 20 осуществится отключение зубчатого колеса 18 от выходного вала 15 и произойдет опускание резца 5 на заготовку решетки 2. 8этот момент кривошип 8 займет крайнее правое положение, и кулачок 28 через датчик 30 осуществит включение муфты 21, которая соединит зубчатое колесо 19 с выходньм валом 15. При вращении кривошипа 8 исполнительный продолжит свое поступательное движение и аналогичным образом произойдет нарезание штриха на заготовке 2(в интервале времени t) .Рабочий ход исполнительного органа 4 закончится в момент когда кривошип 8 займет крайнее левое положение. При дальнейшем вращении кривошипа 8 начнется обратный ход исполнительного органа. В крайнем правом положении кривошипа 8, т.е. в крайнем левом положении кривошипа 7, произойдет отключение муфты 21 и включение муфты 20, так что обратный ход исполнительного органа будет продолжаться до прихода кривошипа 7 в крайнее правое положение. В течение всего обратного хода резец 5 остается поднятым над 3аготовками 1,2. формула изобретения Привод перемещения исполнительного органа прецизионной делительной машины, содержащий два кривошипно-шатунных механизма, кривошипы которых развернуты друг относительно друга, расположенных на одном приводцом валу, кинематически связанных через рейки с зубчатыми колесами, и муфту, управляемую датчиком, отличающийся тем, что, с целью улучшения качества при одновременной обработке двух дифракционных решеток,привод снабжен аыходньо валом, на концах которого расположены упомянутые зубчатые колеса, дополнительной муфтой с датчиком и гибким элементом для взаимодействия с выходным валом и исполнительным органом, причем зубчатые колеса связаны с. выходным валом через основную и дополнительную муфты. . . Источники информации, прйНятШ so внимание при экспертизе 1. Авторское свидетельство СССР I 446395, кл. В 23 Q 17/02, 1972.
ф11г.1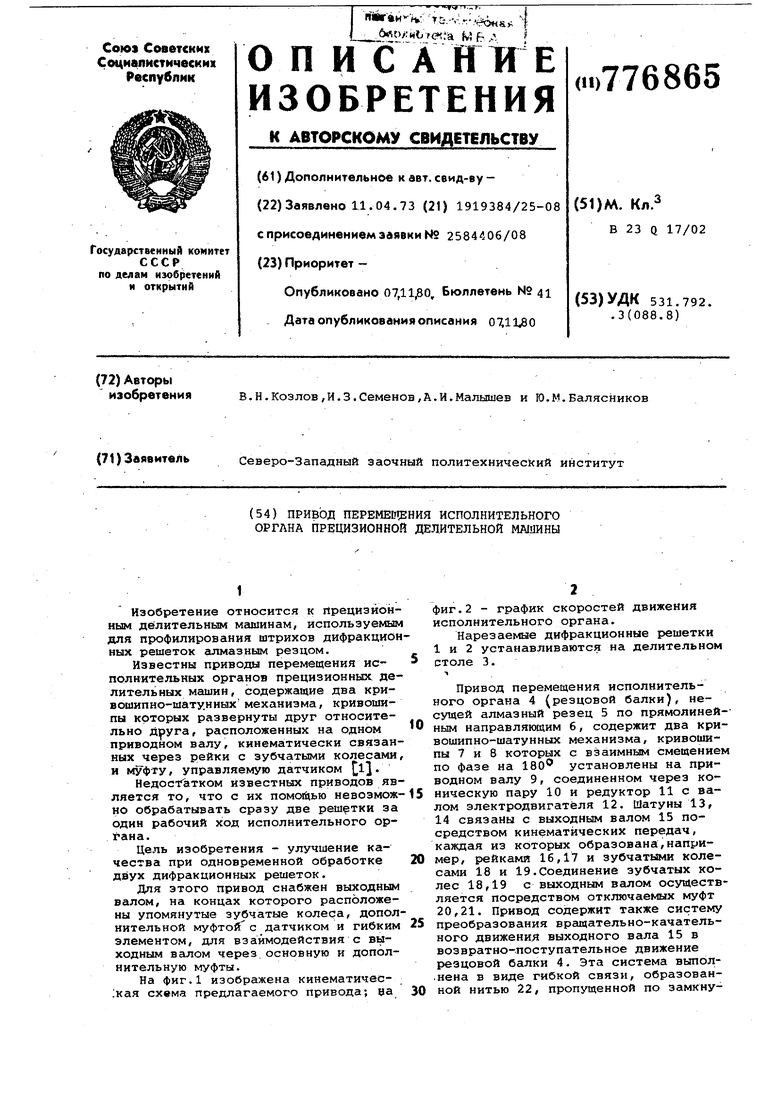
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подачи заготовки дифракционной решетки | 1972 |
|
SU446395A1 |
| ДЕЛИТЕЛЬНАЯ МАШИНА ДЛЯ НАРЕЗАНИЯ ДИФРАКЦИОННЫХ РЕШЕТОК | 1990 |
|
RU2027578C1 |
| Привод резцовой каретки делительной машины | 1990 |
|
SU1756114A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616656C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616655C1 |
| Зубчатый механизм пресса | 2023 |
|
RU2817027C1 |
| Устройство для вращения исполнительного органа манипулятора | 1982 |
|
SU1055638A1 |
| Перемешивающее устройство с прерывистым движением рабочего органа | 2019 |
|
RU2727955C1 |