(Л
4 4;:
фиг. 2
Изобретение относится к приборам для воспроизведения кривых и может быть использовано, например, в учебном процессе ВУЗов.
Цель изобретения - расширение диапазона воспроизводимых кривых путем одновременного воспроизведения графика перемещений коромысла пространственного че- тырехзвенного шарнирного механизма и эллипса, являюш,егося проекцией перемещения конца кривощипа на плоскости движения оромысла.
i На фиг. 1 представлена кинематическая схема пространственного четырехзвенного шарнирного механизма; на фиг. 2 - кинематическая схема прибора (плоский аналог пространственного механизма).
Пространственный щарнирный четырех- Звенник (фиг. 1) состоит из четырех звеньев: - кривощип, - шатун, - коромысло, а стойка , которые связаны один с другим с помощью двух вращательных кинематических пар в точках Оо и О| и двух сферических кинематических пар в точках А и В.
Кривошип а вращается в плоскости вокруг точки Оо; коромысло с вращается в плоскости Р вокруг точки О|. Расположенные под углом а плоскости Р и У пересе- каются по оси Х-Х. Кривошип о. и коромысло с связаны с шатуном b через сферические Кинематические пары в точках А и В.
Находим характерные точки механизма: из точки Оо и Oi на ось Х-Х опускаем перпендикуляры и находим точки Оз и О2. Следовательно, определяются отрезки т О|О2, , п Оз, которые характеризуют размер стойки . Также из точек Оо и А на плоскость Р опускаем перпендикуляры и находим точки А. и О - радиус вектор эллипса, В - угол радиуса - вектора эллипса. Отрезок характеризует координату 7д точ
ки А, а отрезок определяет собой проекцию шатуна на плоскость Р. Угол а отчисляется от линии, которая расположена параллельно оси Х-Х, принадлежит плоскости V и характеризует угол поворота кривошипа.
Таким образом, на плоскости Р образуется плоский аналог пространственного четырехзвенного механизма ОАрВО, где OOi dp - стойка, с - коромысло, а - переменный радиус кривошипа, и cosy - проекция шатуна на плоскости Р.
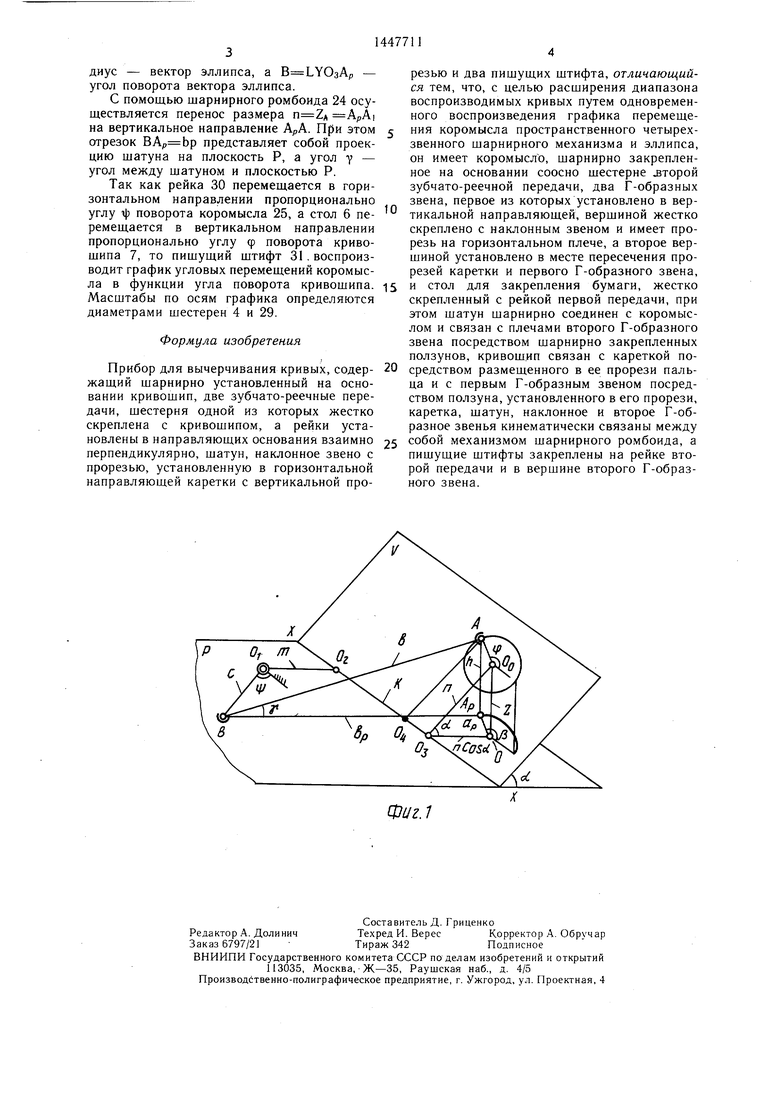
В основании, т. е. корпусе 1 (фиг. 2) свободно установлен вал 2, на котором жестко закреплена втулка 3 и шестерня 4. Шестерня 4 находится в зацеплении с рейкой 5, которая свободно перемещается в вертикаль- ной направляющей корпуса 1. Подвижный стол 6, на котором крепится бумага, жестко связан с рейкой 5.
0
5
5
5
5
Кривошип, который установлен во втулке 3, крепится винтом 8, ползун 9 установлен на кривошипе 7 и крепится винтом 10. На ползуне 9 жестко закреплена ось 11, установленная в вертикальной прорези каретки 12, которая свободно установлена в горизонтальной направляющей корпуса . Ползун 13 с помощью шарнира 14 закреплен на конце кривошипа 7 и установлен в прорези горизонтального плеча Г-образного звена 15, вертикальное плечо которого установлено в направляющий корпус 1. В вершине О4 с Г-образным звеном под углом а скреплено наклонное звено 16, угол наклона фиксируется винтом 17. В месте пересечения прорезей каретки 12 и звена 15 установлен пишущий штифт 18, а в месте пересечения прорезей каретки 12 и звена 16 - ось 19. Второе Г-образное звено 20 вершиной скреплено с пишущим щтифтом 18, а на его плечах установлены ползуны 21 и 22, шарнирно 0 закрепленные на концах шатуна 23. Каретка 12, шатун 23, звенья 16 и 20 кинематически связаны между собой механизмом 24 шарнирного ромбоида, который обеспечивает равенство размеров . Коромысло 25 шарнирно соединено с шатуном 23, установлено во втулке 26 и зафиксировано винтом 27. Втулка 26 установлена на оси 28 и скреплена с шестерней 29, находящейся в зацеплении с рейкой 30, на которой закреплен пишущий штифт 31. Рейка 30 установлена в горизонтальной направляющей.
Кинематическая схема прибора является плоским аналогом пространственного четы- рехзвенника.
Настройка прибора вначале по заданным параметрам а, Ь, с, т. к. п, ф, а и ОзО - ncosa г фиксируют характерные точки Oi, О2 и ОзО. Далее винтом 8 фиксируют длину большой оси эллипса, т. е. (14), а винтом 10 фиксируют положение втулки 9 на кривошипе 7, т. е. малую ось эллипса а (11). Угол а фиксируют винтом 17, длину коромысла фиксируют винтом 27.
После фиксации всех параметров кривошип 7 вращают против часовой стрелки и при его полном обороте пишущий штифт 31, т. е. точка М, на бумаге подвижного стола 6 вычерчивает искомый график перемещения (ф), а пишущий штифт 18 на бумаге неподвижного стола описывает эллипс, проекцию точки П на плоскость Р.
При вращении кривошипа 7 ось 11, установленная в прорези каретки 12, перемещает ее вдоль оси ОбУ в горизонтальном направлении. Аналогично ползун 13 перемещает звено 15 по направлению оси ОзХ в вертикальном направлении. При одновременном движении каретки 12 и звена 1.5 во взаимно перпендикулярном направлении установленный в их прорезях пишущий штифт 18 относительно неподвижной ллос- кости Р описывает эллипс. При этом ОАр представляет собой перемещенный ра0
0
0
диус - вектор эллипса, а - угол поворота вектора эллипса.
С помощью шарнирного ромбоида 24 осуществляется перенос размера , ApAi на вертикальное направление АрА. При этом отрезок представляет собой проекцию шатуна на плоскость Р, а угол у - угол между шатуном и плоскостью Р.
Так как рейка 30 перемещается в горизонтальном направлении пропорционально углу г|) поворота коромысла 25, а стол б пе- ремещается в вертикальном направлении пропорционально углу ф поворота кривошипа 7, то пишущий штифт 31 . воспроизводит график угловых перемещений коромысла в функции угла поворота кривошипа. Масштабы по осям графика определяются диаметрами шестерен 4 и 29.
Формула изобретения
Прибор для вычерчивания кривых, содер- жащий шарнирно установленный на основании кривошип, две зубчато-реечные передачи, шестерня одной из которых жестко скреплена с кривошипом, а рейки установлены в направляющих основания взаимно перпендикулярно, шатун, наклонное звено с прорезью, установленную в горизонтальной направляющей каретки с вертикальной прорезью и два пишущих штифта, отличающийся тем, что, с целью расширения диапазона воспроизводимых кривых путем одновременного воспроизведения графика перемещения коромысла пространственного четырех- звенного шарнирного механизма и эллипса, он имеет коромысло, шарнирно закрепленное на основании соосно шестерне второй зубчато-реечной передачи, два Г-образных звена, первое из которых установлено в вертикальной направляющей, вершиной жестко скреплено с наклонным звеном и имеет прорезь на горизонтальном плече, а второе вершиной установлено в месте пересечения прорезей каретки и первого Г-образного звена, и стол для закрепления бумаги, жестко скрепленный с рейкой первой передачи, при этом шатун шарнирно соединен с коромыслом и связан с плечами второго Г-образного звена посредством шарнирно закрепленных ползунов, кривошип связан с кареткой посредством размешенного в ее прорези пальца и с первым Г-образным звеном посредством ползуна, установленного в его прорези, каретка, шатун, наклонное и второе Г-об- разное звенья кинематически связаны между собой механизмом шарнирного ромбоида, а пишущие штифты закреплены на рейке второй передачи и в вершине второго Г-образного звена.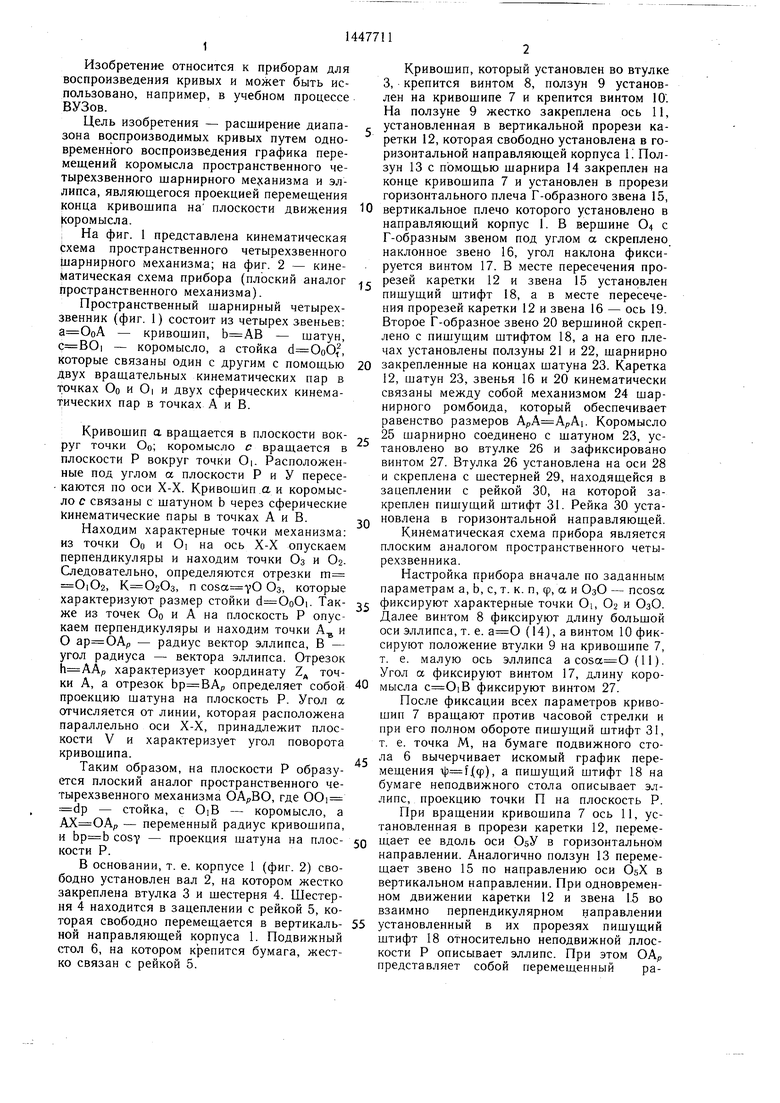
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для вычерчивания кривых | 1987 |
|
SU1475832A1 |
| Прибор для воспроизведения кривых | 1990 |
|
SU1743903A1 |
| Прибор для вычерчивания кривых | 1986 |
|
SU1341058A1 |
| Прибор для воспроизведения кривой пересечения геометрических тел | 1990 |
|
SU1743904A1 |
| Прибор для воспроизведения кривых | 1989 |
|
SU1655817A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАСЧЕТА ШАТУННО-КУЛАЧКОВЫХ МЕХАНИЗМОВ | 1970 |
|
SU274360A1 |
| Прибор для вычерчивания кривых конических сечений | 1977 |
|
SU676475A1 |
| Прибор для вычерчивания кривых | 1989 |
|
SU1669768A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ КРИВЫХ | 1971 |
|
SU435147A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
Изобретение относится к приборам для воспроизведения кривых и позволяет расширить диапазон воспроизводимых кривых путем одновременного воспроизведения графика перемещений коромысла пространственного четырехзвенного шарнирного механизма и эллипса, являющегося проекцией перемещения конца кривошипа на плоскость движения коромысла. Кинематическая схема прибора является плоским аналогом пространственного механизма. С кривошипом 7 шестерней 4 связана рейка 5, на которой закреплен подвижный стол 6, с коромыслом 25 через шестерню 29 связана рейка 30 с пишущим штифтом 31, который воспроизводит график перемещений коромысла. Пишущий штифт 18, установленный в пересечении прорезей каретки 12 и Г-образного звена 15, воспроизводит эллипс. 2 ил.
| Прибор для вычерчивания кривых | 1986 |
|
SU1341058A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
