Изобретение относится к области автоматического управления, в частности к устройствам управления весодозирующей техникой, преимущественно в системах управления дозированием различных веществ, предназначенных для дальнейшего смешивания, например, при приготовлении композиции в производствах синтетических моющих средств (CMC).
Известное устройство обеспечивает повышение точности отвеса дозы путем учета ошибки предыдущего отвеса, а также сокращение простоев и потерь сырья при переполнении весов. Однако точность указанного устройства недостаточна из-за осу- ществления коррекции погрешности дозирования путем изменения величины задания на данный цикл дозирования по
ошибке предыдущего отвеса следующим образом:
Рн-i Ро + Pi-Ui.
(1)
где Рн-i - задание на следующий цикл взвешивания;
Pi - задание на предыдущий цикл взвешивания;
РО - навеска дозатора, определяемая типом рецептуры CMC;
Ui - величина дозы предыдущего цикла дозирования.
При этом значение PI+I ограничивается величиной (Ртах) наибольшего предела дозирования, определяемой конкретным типом дозатора и его весо- измерителя
00
Сл)
о
СЛ 00
Рм Ртах
(2)
С учетом того, что в промышленных условиях выходной сигнал весоизмерителя имеет нерегулярные и недетерминированные составляющие типа выбросов, обусловленные воздействием импульсных помех и других факторов, например падением больших масс дозируемого материала в весовой бункер дозатора, что вызывает значительные динамические удары и характерно для производств CMC, рассчитанное по формуле (1) значение величины задания на следующий цикл дозирования может превысить наибольший предел дозирования. При этом, с учетом соотношения (2), в следующем цикле произойдет только частичная компенсация предыдущей ошибки, что не будет учтено в последующих циклах дозирования, т.к. известное устройство осуществляет коррекцию погрешности только по ошибке предыдущего отвеса. Кроме того, известное устройство не обеспечивает прогнозирования величины ошибки по результатам предыдущих дозировок.
Указанные недостатки отрицательно влияют на точность дозирования и снижают эффективность использования известного устройства в автоматизированных системах управления дозированием.
Целью изобретения является повышение точности дозирования.
Поставленная цель достигается тем, что в известном устройстве для управления весовым порционным дозатором второй сумматор выполнен в виде счетчика, четырех сумматоров, двух регистров, блока умножений, двух блоков вычитания, элемента задержки и блока деления,
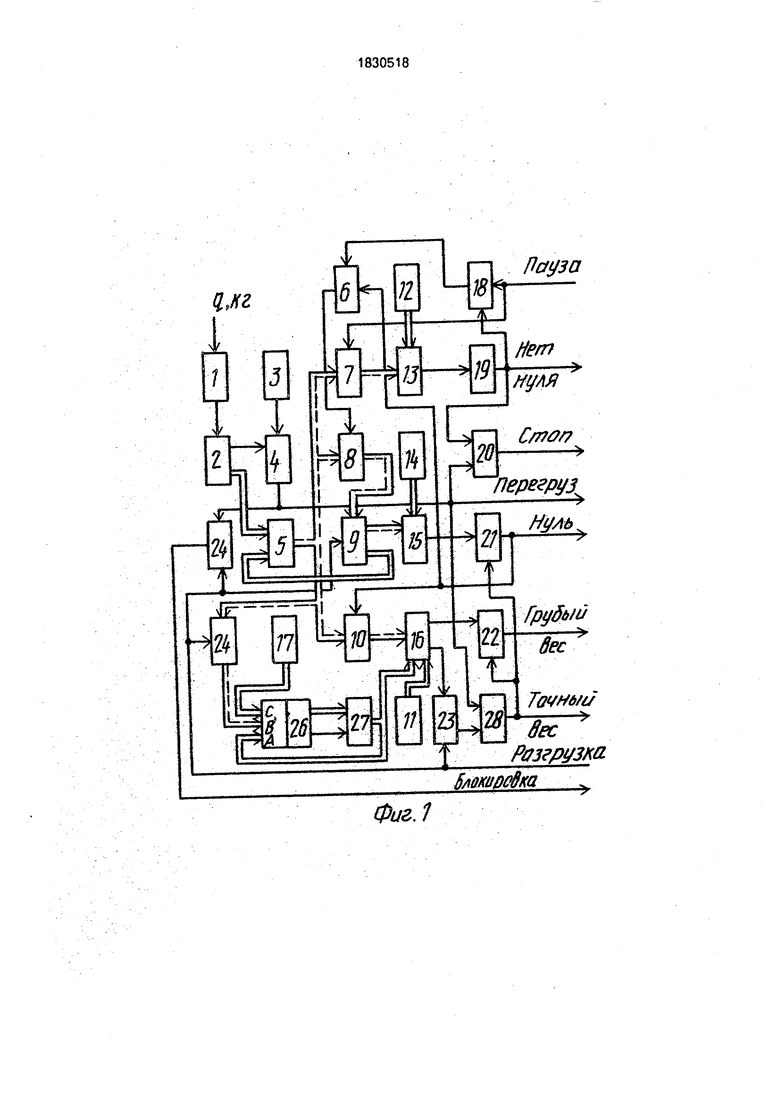
На фиг. 1 показана блок-схема устройства.
Устройство для управления весовым порционным дозатором содержит датчик 1 веса, преобразователь 2, задатчик 3 перегруза, компаратор 4 напряжения, сумматоры 5 и 26, элементы 6,19,21,22 и 23 памяти, ключи 7, 8, 10 и 25, блок 9 коррекции нуля, задатчики 11 грубого и 17 точного веса, задатчики 12 зоны нуля и 14 нуля, цифровые компараторы 13, 15 и 16, элемент 18 задержки, элементы ИЛИ 20 и 28, задатчик 24 блокировки по перегрузу и регистр 27.
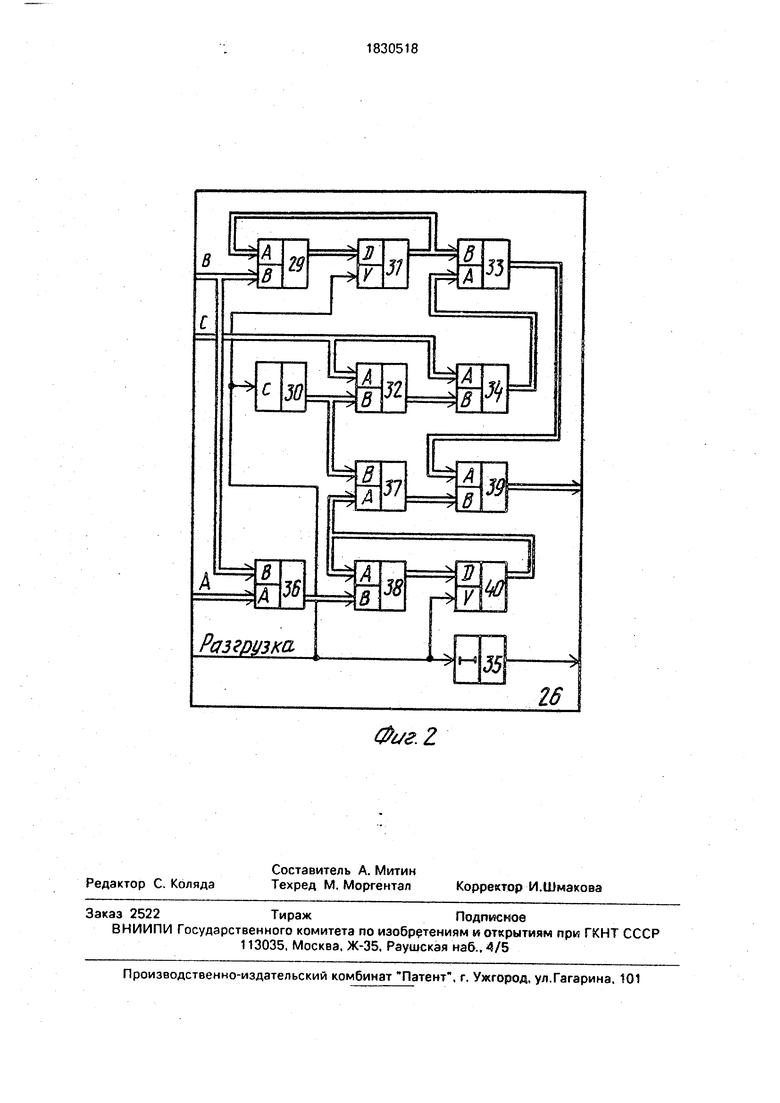
Сумматор (фиг. 2) включает сумматоры 29, 34, 38 и 39, счетчик 30, регистры 31 и 40. блок 32 умножения, блоки 33 и 36 вычитания, элемент 35 задержки и блок 37 деления,
Устройство работает следующим образом.
В исходном состоянии (при включении питания) все элементы 6, 19, 21, 22 и 23 памяти устанавливаются в нуль (на выходе - сигнал логического 01 а в регистр 27 происходит запись величины навески, установленной на задатчике 17 точного веса, по цепи сброс по питанию (не показана). Ключи 7. 8 и 10 закрыты, ключ 24 открыт, а блок 8 в коррекции нуля выключен (вклю0
чен режим разгрузки дозатора, т.е. открыт
донный клапан весового бункера).
Измерительный сигнал с выхода датчика 1 веса через преобразователь 2 подается в аналоговой форме на вход компаратора 4
5 напряжения для сравнения с уставкой на задатчике 3, а также в виде цифрового кода на вход сумматора 5, на выходе которого формируется код текущего веса материала,. откорректированный с учетом его начально0 го сдвига с помощью блока 9. В свою очередь, код сигнала текущего веса подается через соответствующие ключи в цепи фор мирования выходных сигналов устройства, состоящие из следующих элементов:
5 1)7, 12, 13,
2)6,8,9, 14, 15, 18,21 3. 19. 20, (2. 3,4)
4)10, 11, 16. 22 - Грубый
5)10, 16. 17, 23-28 (2. 3, 4) - Точный 0
6)2, 3, 4 - Перегруз ;
7)2, 3, 4, 24 - Блокировка. Сигналы Разгрузка и Пуск являются
входными сигналами устройства.
5 при запуске дозатора в работу режим разгрузки выключается (закрывается донный клапан весового бункера) и снимается запрет на включение блока 9.
Сигнал Пуск дозатора поступает на
0 управляющий вход ключа 7, который соединяет через сумматор 5 выход преобразователя 2 с одним из входов компаратора 13, другим своим входом связанного с задатчи- ком 12 зоны нуля. Если сигнал фактическо5 го нуля веса находится вне пределов допустимой зоны, срабатывает компаратор 13, и сигнал логической 1 запоминается элементом 19 памяти, который формирует на выходе аварийный сигнал Нет нуля,
0 выключающий элемент 18 задержки, и через элемент ИЛИ 20 - сигнал Стоп (запрет на включение загрузки). Если сигнал фактического нуля веса находится в пределах допустимой зоны, то сигналы Нет нуля и
5 Стоп не формируются и элемент 18 задержки не выключается.
После окончания сигнала Пуск дозатора закрывается ключ 7, а на выходе элемента 18 задержки формируется сигнал логической Г, который запоминается элементом 6. В результате сигнал логической 1 с выхода элемента 6 поступает на управляющий вход ключа 8, который соединяет выход преобразователя 2 через сумматор 5 со входом блока 9. Этот блок запомина- ет величину фактического нуля веса и изменяет ее до величины нуля, заданной задатчиком 14. При этом срабатывает компаратор 15, а сигнал логической 1 с его выхода запоминается элементом 21, кото- рый формирует на выходе сигнал Нуль. Под действием этого сигнала сбрасывается элемент 6. который закрывает ключ 8, а блок 9 формирует на своем другом выходе сигнал разности между фактическим и заданным нулем веса, который поступает на вход сумматора 5 для алгебраического суммирования с сигналом измерения от преобразователя 2.
Сигнал Нуль с выхода элемента 21 па- мяти поступает также в цепь включения исполнительного механизма загрузки (не показан) и на управляющий вход ключа 10, который открывается и соединяет выход сумматора 5 с одним из входов компаратора 16, другими своими входами связанного с задатчиком 11 грубого веса и регистром 27.
При наборе грубого веса на первом выходе компаратора 16 формируется сиг- нал логической 1, который запоминается элементом 22, а на его выходе появляется сигнал Грубый вес, переключающий исполнительный механизм загрузки дозатора в режим досыпки (доливки).
При наборе точного веса на втором выходе компаратора 16 формируется сигнал логической 1, который запоминается элементом 23 и формирует на выходе элемента ИЛИ 28 сигнал Точный вес, отключающий исполнительный механизм загрузки и устанавливающий в исходное состояние элементы 21 и 22 памяти. В результате закрывается ключ 10 и отключает выход сумматора 5 от входа компаратора 16.
При включении режима разгрузки происходит сброс памяти нуля веса в блоке 9 и сброс элемента 23 памяти, устройство переходит в исходное состояние. С приходом Очередного импульса Пуск цикл работы устройства для управления весовым порционным дозатором повторяется.
При превышении сигналом текущего веса максимально допустимой (для данной дозировки) величины срабатывает компаратор 4, на выходе которого появляется аварийный сигнал Перегруз, формирующий через элемент ИЛИ 20 сигнал Стоп аварийного отключения исполнительных
механизмов загрузки, а через элемент ИЛИ 28 - сигнал Точный вес.
На задатчике 24 блокировки по перегрузу устанавливается количество последовательных циклов перегруза, необходимых для аварийного останова устройства. Последний осуществляется сигналом Блокировка (включения загрузки) с выхода указанного задатчика. формируемого при соответствии количества последовательных циклов прегруза заданному. Установка задатчика 28 в исходное состояние осуществляется по цепи сброс по питанию (не показана) и по фронту сигнала Разгрузка после каждого нормального отвеса (при отсутствии сигнала Перегруз).
Суммарная погрешность дозирования представляет собой разность между суммарным заданием на проведенное количество циклов и фактическим расходом дозируемого материала на данный цикл взвешивания, а откорректированное по указанной ошибке значение величины задания на следующий цикл взвешивания определяется сумматором 26 по формуле:
Рн-1 Ро + I Ро- Z Uj
J 1
или
Рн-1 - 0 + 1) Ро- 2 Uj, J 1
где i - количество дозирования.
Дальнейшее повышение точности дозирования достигается путем прогнозирования величины ошибки (для уменьшения амплитуды ее колебаний) на следующий цикл дозирования по результатам предыдущих отвесов и проведения дополнительной коррекции задания:
PH-I - 0 +1) Ро- 2 Uj + А Рн-1.(5)
J i
С учетом центральной предельной теоремы величину Д PI-H можно представить в виде ее среднего значения:
APi+i (Pj-Uj). ,i или .
ДРм(1/{). Z(Pj-Uj), J t
а проведение коррекции ошибки по результатам предыдущих дозировок и прогнозируемой величине ошибки на следующий цикл
дозирования осуществляется по следующему алгоритму:
PI+I 0 + 1). РО- 2 Uj + (1 /i) Ј (Pj-Uj) (8)
Реализация алгоритма (8) осуществляется сумматором 26 следующим образом.
В исходном состоянии (при включении питания) иа выходах регистра 31 и счетчика 30 устанавливаются нулевые сигналы по цепи сброс по питанию (не показана), соответственно, нулевые сигналы устанавливаются на выходах сумматора 29 и блоков 32 умножения и 37 деления. На входе С сумматора 26 присутствует сигнал Ро с выхода задатчика 17 точного веса, который через сумматор 34, блок 33 вычитания и сумматор 39 подается на выход сумматора 26 и записывается в регистр 27 по цепи сброс по питанию.
После окончания первой дозировки на входе В сумматорэ26 присутствует сигнал фактической дозы (Ui) первого цикла дози- рования, который через сумматор 29 поступает на вход регистра 31 и записывается в него по фронту сигнала Разгрузка. Одновременно срабатывает счетчик 30 циклов, а на его выходе формируется сигнал, соответствующий числу 1. В результате на выходах блоков 32-34 устанавливаются следующие сигналы:
Ро.(9)
+ и32 2Р0.(10)
U33 2P0-Ui(11)
На вход А сумматора 26 подается с выхода регистра 27 сигнал задания на взвешивание (Pi). При этом на выходе блока 36 вычитания формируется сигнал ошибки отвеса:
U38 Pi-Ub(12)
который через сумматор 38 подается на вход регистра 40 и записывается в него по фронту сигнала Разгрузка. После этого на выходе блока 37 деления формируется сигнал:
U37-(PHJi)/1 Pi-Ui(13)
В результате сигнал на выходе сумматора 39:
. U39 2P0-Ui +Pi-Ui 3Po-2Ui. (14)
Последний сигнал поступает на вход регистра 27 и записывается в него в момент срабатывания элемента 35 задержки, включение которого осуществляется по фронту сигнала Разгрузка. Длительность задержки определяется временем формирования информационного сигнала на выходе сумматора 26,
После окончания второй дозировки на выходах соответствующих блоков устройства формируются следующие сигналы:
U3i Ui + U2,(15)
им ЗР0,(16)
U33 3P0-(Ui + U2J,(17)
U38 P2-U2,(18)
U38- P2-U2 + Pt-Ul,(19)
U37 (Р1-У1 + P2-U2)/2,(20)
0U39 - 3P0-(U1 + Uz).+ (PHJl + )/2. (21)
Сигнал (21) также записывается в регистр 27 с помощью элемента 35 задержки и т.д. При этом выходной сигнал сумматора 39 идентичен соотношению (8), т.е. сумма5 тор 26 обеспечивает реализацию заданного алгоритма коррекции навески.
Таким образом предлагаемое устройство обеспечивает повышение точности дози- рования за счет компенсации общей
0 погрешности на данный цикл взвешивания, а также снижение амплитуды колебаний величины ошибки дозирования за счет прогнозирования ее значения на следующий цикл взвешивания и проведения дополнитель5 ной коррекции навески по указанной величине. При этом повышается эффективность использования устройства в автоматизированных системах управления дозированием, т.к. возрастает точность указанных
0 систем, что, в свою очередь, положительно влияет на качестве готового продукта. Формула изобретения Устройство для управления весовым порционным дозатором, содержащее дат5 чик веса, подключенный выходом к входу преобразователя, четыре ключа, информационные входы которых соединены с выходом первого сумматора, подключенного первыми разрядными входами к соответству0 ющим разрядным выходам преобразователя, выход которого соединен с входом компаратора напряжения, другой вход которого подключен к выходу задатчика перегруза, первый цифровой компаратор,
5 подключенный первым счетным входом к выходу первого ключа, а выходом - к входу первого элемента памяти, выход которого соединен с первыми входами элемента задержки и первого элемента ИЛИ, второй
0 цифровой компаратор, подключенный первым счетным входом к выходу второго ключа, а первым выходом - к первому входу второго элемента памяти, третий цифровой компаратор, связанный первыми разрядны5 ми входами с соответствующими выходами задатчика нуля веса, а выходом - с первым входом третьего элемента памяти, подключенного выходом к управляющему входу второго ключа и первому входу четвертого элемента памяти, соединенного выходом с
управляющим входом третьего ключа, связанного выходом с первым входом блока коррекции нуля, а разрядными выходами - с соответствующими вторыми разрядными входами первого сумматора, причем выход компа- ратора напряжения соединен с первым входом задатчика блокировки по перегрузу, вторым входом первого элемента ИЛИ и первым входом второго элемента ИЛИ, выход которого подключен к вторым входам второ- го и третьего элементов памяти, а второй вход - к выходу пятого элемента, памяти, первый вход которого соединен с вторым входом задатчика блокировки по перегрузу и управляющими входами блока коррек- ции нуля, четвертого ключа и второго сумматора, а второй вход - с вторым выходом второго цифрового компаратора, вторые разрядные входы которого подключены к соответствующим разрядным выходам за- датчика грубого веса, а третьи разрядные входы - к соответствующим разрядным выходам регистра и первым разрядным входам второго сумматора, вторые разрядные входы которого соединены с соответствую- щими разрядными выходами задатчика точного веса, а разрядные выходы с соответствующими разрядными входами регистра, управляющий вход которого соединен с выходом второго сумматора, информаци- онный вход которого подключен к выходу четвертого ключа, выход блока коррекции нуля соединен с информационным входом третьего цифрового компаратора, а управляющий вход первого ключа -с вторым входом элемента задержки, выход которого подключен к второму входу четвертого элемента памяти, а зздатчик зоны нуля соединен разрядными выходами с соответствующими вторыми разрядными входами первого цифро- вого компаратора, при этом второй вход элемента задержки и первый вход пятого элемента памяти являются соответственно входами Пуск и Разгрузка устройства, выходами Нет нуля, Стоп. Перегруз, Нуль. Грубый вес, Точный вес и Блокировка которого являются соответственно выходы первого элемента памяти, первого элемента ИЛИ. компаратора напряжения, третьего и второго элементов памя- ти, второго элемента ИЛИ и зэдатчика блокировки по перегрузу, отличающееся тем, что, с целью повышения точности
дозирования, второй сумматор включает третий сумматор, разрядные выходы которого подключены к соответствующим разрядным входам второго регистра, разрядные выходы которого соединены с соответствующими первыми разрядными входами третьего сумматора и первыми разрядными входами первого блока вычитания, счетчик, вход которого подключен к входу элемента задержки и управляющим входам второго и третьего регистров, а разрядные выходы соединены с соответствующими первыми разрядными входами блока деления и блока умножения, разрядные выходы которого подключены к соответствующим первым разрядным входам четвертого сумматора, пятый сумматор, первые разрядные входы которого подключены :. соответствующим разрядным выходам блока деления, вторые разрядные входы ю .орого соединены с соответствующими разрядными выходами третьего регис а и первыми разрядными входами ик.л.гого сумматора, вторые разрядные вхсъ ы которого подключены к соответствующим разрядным выходам второго олока вычитания, а разрядные выводы - соответствующим разрядным входам т ,/ьего регистра, вто рые разрядные входь третьего сумматора соединены с соответствующими первыми разрядными входам г второго блока вычитания, а вторые разрядные входы блока умно жения подключе ы к соответствующим вторым разряди i входам четвертого сумматора, разряди е выходы которого соединены с соотв :тствующими вторыми разрядными LXO .ами первого блока вычитания, разрядное выходы которого подключены к соответ-п ,ующим вторым разрядные входам лятог; сумматора, причем первы .и разрядными в одами второго сумматора являются соотве ствующие вторые разрядные входы второ о блока вычитания, первые разрядные в оды которого являются информационным входом второго сумматора, вторыми разрядными входами которого являются соответствующие вторые разрядные входы блока умножения, управляющим входом второго сумматора является вход элемента задержки, выход которого является выходом второго сумматора, разрядными выходами которого являются соответствующие разрядные выходы пятого сумматора.
%№
Рауза
вес Разгрузка
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления весовым порционным дозатором | 1989 |
|
SU1795423A1 |
| Устройство управления весовым порционным дозатором | 1988 |
|
SU1522165A2 |
| Устройство управления весовым порционным дозатором | 1990 |
|
SU1783484A1 |
| Устройство для управления весовым порционным дозатором | 1989 |
|
SU1803907A1 |
| Устройство управления весовым порционным дозатором | 1985 |
|
SU1308990A1 |
| Устройство управления весовым порционным дозатором | 1988 |
|
SU1520486A2 |
| Устройство для многокомпонентного дозирования | 1990 |
|
SU1789974A1 |
| Устройство автоматического дозирования | 1981 |
|
SU968619A1 |
| Устройство для многокомпонентного порционного дозирования компонентов синтетических моющих средств | 1991 |
|
SU1784953A1 |
| Цифровое устройство управления весовым дозированием | 1984 |
|
SU1167440A1 |
Изобретение относится к области автоматического управления, в частности к устройствам управления весодозирующей техникой, преимущественно в системах управления дозированием различных веществ, предназначенных для дальнейшего смешивания, например, при приготовлении композиции в производствах синтетических моющих средств. Устройство обеспечивает повышение точности дозирования путем учета общей погрешности дозирования и снижения амплитуды погрешностей отдельных отвесов с помощью прогнозирования их значений по результатам предыдущих дозировок за счет выполнения второго сумматора в виде четырех сумматоров, счетчика, двух регистров, блока умножения, двух блоков вычитания, элемента задежки и блока деления. 2 ил.
Фаг.1
Фиг. 2
| Устройство управления весовым порционным дозатором | 1988 |
|
SU1522165A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
