00 (А Ю О 00
Изобретение относится к автоматизации железнодорожного транспорта и предназначено для использования при реализации электропривода маневровых локомотивов с электродинамическим торможением.
Цель - повышение точности регулирования.
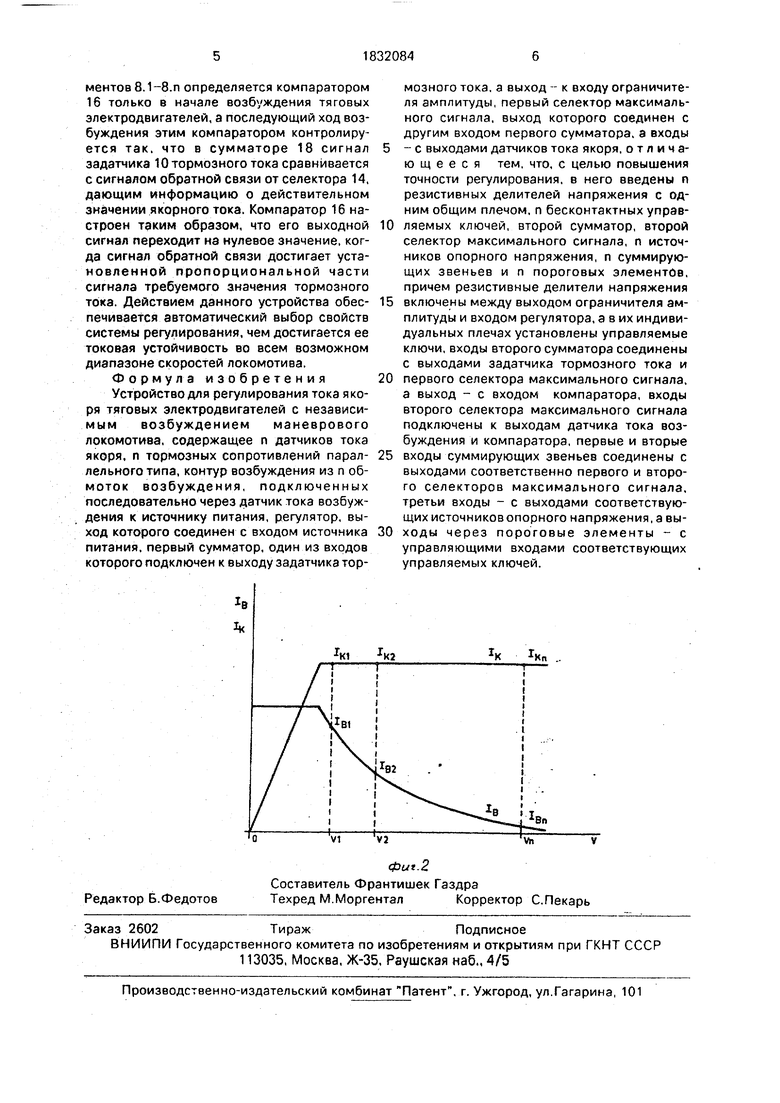
На фиг.1 приведена функциональная схема описываемого устройства для регулирования тока якоря п тяговых электродвига- телей с независимым возбуждением маневрового локомотива; на фиг.2 - зависимости тока возбуждения и тока якоря тягового электродвигателя от скорости движения локомотива.
Устройство содержит размещенные на тяговых электродвигателях 1.1-1.п (фиг.1) тормозные сопротивления 2.1-2.П параллельного типа, датчики 3.1-З.п тока якоря, обмотки 4.1-4.П возбуждения, источники 5.1-S.n опорного напряжения, резистивные делители 6.1-б.п напряжения с одним общим плечом, бесконтактные управляемые ключи 7..1-7.п, пороговые элементы 8.1-8.П, суммирующие звенья 9.1-Э.п, задатчик 10 тормозного тока, регулятор 11, источник 12 питания, датчик 13 тока возбуждения, селекторы 14,15 максимального сигнала, компаратор 16 (переходного процесса), сумматоры 17,18, ограничитель 19 амплитуды. Обмотки 4.1-4.п возбуждения подключены последовательно через датчик 13 тока возбуждения к источнику 12 питания. Выход регулятора 11 соединен со входом источника 12 питания. Один из входов сумматора 17 подключен к выходу задатчика 10 тормозного тока, а выход - ко входу ограничителя 19 амплитуды. Выход селектора 14 максимального сигнала соединен с другим входом сумматора 17, а входы - с выходами датчиков 3.1-З.п тока якоря. Резистивные делители 6.1-б.п напряжения включены между выходом ограничителя 1-9 амплитуды и входом регулятора И, а в их индивидуальных плечах установлены управляемые ключи 7.1- 7,п. Входы сумматора 18 соединены с выходами задатчика 10 тормозного тока и селектора 14 максимального сигнала, а выход- со входом компаратора 16. Входы селектора 15 максимального сигнала подключены к выходам датчика 13 тока возбуждения и компаратора 16. Первые и вторые аходы суммирующих звеньев 9.1-Э.п соединены с выходами соответственно селекторов 4 и 15 максимального сигнала, третьи входы - с выходами соответствующих источников 5.1-5.П опорного напряжения, а выходы через пороговые элементы
0
8.1-8.П - с управляющими входами соответствующих управляемых ключей 7.1-7.П.
Устройство работает следующим образом.
Резистивныеделители6.1-б.п напряжения образуют в совокупности делитель с переменным коэффициентом передачи. В пороговые элементы 8.1-8,п поступают сигналы с информацией о токовых состояниях тяговых электродвигателей 1.1-l.n и, в конечном счете, возбуждение последних регулируется по цепи обратной связи в зависимости от скорости движения локомотива. На фиг.2 проиллюстрирован процесс изменения тока возбуждения tB при поддержании на неизменном уровне тока якоря 1К. Например, при скорости Vi, соответствующей току возбуждения 1В1, имеет место ера-, батывание порогового элемента 8.1 и изменение свойств регулятора 11. Далее с ростом скорости последовательно срабатывают пороговые элементы 8.2, 8.3 и т.д. Результирующий коэффициент передачи делителей 6.1-б.п при этом снижается.
Значения токов в якорных обмотках снимаются датчиками 3.1-З.п тока якоря, из которых селектором 14 выделяется максимальное значение, по которому осуществляется необходимый процесс адаптации.
Выбранное максимальное значение вводится как величина обратной связи в сумматор . 17, где происходит сравнение с требуемым значением якорного или тормозного тока, генерируемым источником 10. Конечный выходной сигнал сумматора 17 после ограничения ограничителем 19 амплитуды и делителем напряжения поступает на вход регулятора 11. Ко входам суммирующих звеньев 9.1-Э.п одновременно с сигналом селектора 14 подаются выходные сигналы соответствующих источников 5.1- 5.п опорного напряжения, уровни которых распределены между собой в порядке возрастания. Опорные сигналы сравниваются с входным сигналом компаратора 16, уровень напряжения которого определяет количество срабатывающих пороговых элементов 8.1-8.Л при снятой регулировке, т.е. в промежутке времени, когда выходные сигналы датчиков 13, 3.1-З.п токов возбуждения и якоря имеют нулевые значения. В этом случае в суммирующие звенья 9.1-Э.п вводится селектором 15 в качестве управляющего сигнала выходной сигнал компаратора 16. Его уровень выбран таким образом, чтобы перед приведением регулирующей системы в действие были предварительно выбраны ее средние свойства переноса и тем самым и средние динамические свойства. Начальное состояние включения пороговых эле5
0
5
0
5
0
5
0
5
ментов 8.1-S.n определяется компаратором 16 только в начале возбуждения тяговых электродвигателей, а последующий ход возбуждения этим компаратором контролируется так. что в сумматоре 18 сигнал задатчика 10 тормозного тока сравнивается с сигналом обратной связи от селектора 14, дающим информацию о действительном значении якорного тока. Компаратор 16 настроен таким образом, что его выходной сигнал переходит на нулевое значение, когда сигнал обратной связи достигает установленной пропорциональной части сигнала требуемого значения тормозного тока. Действием данного устройства обеспечивается автоматический выбор свойств системы регулирования, чем достигается ее токовая устойчивость во всем возможном диапазоне скоростей локомотива. Формула изобретения Устройство для регулирования тока якоря тяговых электродвигателей с независимым возбуждением маневрового локомотива, содержащее п датчиков тока якоря, п тормозных сопротивлений параллельного типа, контур возбуждения из п обмоток возбуждения, подключенных последовательно через датчик тока возбуждения к источнику питания, регулятор, выход которого соединен с входом источника питания, первый сумматор, один из входов которого подключен к выходу задатчика торй
мозного тока, а выход - к входу ограничителя амплитуды, первый селектор максимального сигнала, выход которого соединен с другим входом первого сумматора, а входы - с выходами датчиков тока якоря, отличающееся тем, что, с целью повышения точности регулирования, в него введены п резистивных делителей напряжения с одним общим плечом, п бесконтактных управ- 10 ляемых ключей, второй сумматор, второй селектор максимального сигнала, п источников опорного напряжения, п суммирующих звеньев и п пороговых элементов, причем резистивные делители напряжения
15 включены между выходом ограничителя амплитуды и входом регулятора, а в их индивидуальных плечах установлены управляемые ключи, входы второго сумматора соединены с выходами задатчика тормозного тока и
20 первого селектора максимального сигнала, а выход - с входом компаратора, входы второго селектора максимального сигнала подключены к выходам датчика тока возбуждения и компаратора, первые и вторые
25 входы суммирующих звеньев соединены с выходами соответственно первого и второго селекторов максимального сигнала, третьи входы - с выходами соответствующих источников опорного напряжения, а вы30 ходы через пороговые элементы - с управляющими входами соответствующих управляемых ключей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухдвигательным тяговым приводом постоянного тока транспортного средства | 1985 |
|
SU1294657A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Устройство для регулирования тягового электропривода автономного транспортного средства | 1987 |
|
SU1546307A2 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2432269C1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| РЕГУЛЯТОР УГЛА ПОДАЧИ ИМПУЛЬСОВ ТОКА В ФАЗНЫЕ ОБМОТКИ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2088040C1 |
Изобретение относится « автоматизации железнодорожного транспорта. Цель - повышение точности регулирования. В состав устройства входят тормозные сопротивления 2.1-2.П параллельного типа, датчики 3.1 -З.п тока якоря, обмотки 4,1-4.п И М4 возбуждения, источники 5.1-5.п опорного напряжения, резистивные делители 6.1-б.п напряжения с одним общим плечом, управляемые 7.1-7.П, пороговые элементы 8.1- 8.п, суммирующие звенья 9.1-9.П. Задатчик 10 тормозного тока, регулятор 11, источник 12 питания, датчик 13 тока возбуждения, селекторы 14, 15 максимального сигнала, компаратор 16, сумматоры 17,18, ограничитель 19 амплитуды. В процессе регулирования тока якоря автоматически обеспечивается изменение свойств регулятора 11 в зависимости от соотношения токов возбуждения и якоря. Благодаря этому достигается устойчивость системы регулирования во всем диапазоне возможных скоростей локомотива. 2 ил. ггг„ U4 Ё
