,чиком частоты вращения на валу. Якорь электродвигателя присоединен к регулируемому источнику постоянного напряжения, а обмотка возбуждения присоединена к вентильному возбудителю, имеющЬму иа входе интегральный регулятор тока возбуждения. Устройство содержит датчики тока якоря и тока возбуждения, узел задания величины момента, блок вычисления действительного значения момента злектродвигателя, узел сравнения действительного и заданного значений момента, реостат с сервомотором, якор которого присоединен к выходу узла сравнения, а выход реостата соединен с задающим входом регулятора возбуждения 1.
Недостатком зтого способа и устройства, его реализующего, является то, что в них не учитывается влияние изменений напряжения на якоре и тока возбуждения на коммутацию. Кроме того, в них не предусматривается ограничение ударов при выборе зазоров в передачах и рывков при выборе слабин канатов, что не дает возможности их использования в электроприводе буровых установок и экскаваторов. Известен способ регулирования скорости
электродвигателя постоянного тока, которым предусматривается регулирование тока возбуждения в функции тока якоря в определенной зоне, что обеспечивает при регулировании скорости выше номинальной механические характеристики, близкие к характеристикам электропривода с постоянной мощностью иа ваггу 2. Недостатками этого способа являются: необходимость для его осуществления применения электродвигателей со специально подобранными параметрами, а также то, что в нем не учитываются законы, определяющие изменение допустимой величины тока якоря при изменении режима электродвигателя. Кроме того, применение этого способа затруднено для реверсивных быстродействующих электроприводов.
Известен также способ, который предусматривает регулирование автономного электропривода постоянного тока, включающего систему генератор постоянного тока - электродвигатель В нем измеряют напряжение на якоре и ток якоря генератора, сравнивают зти велич;1шы с уставками, перемножают большие из сравниваемых сигналов и поддерживают сигнал )1роизведения на заданном уровне посредством воздействия на ток возбуждения генератора и изменения тока возбуждения двигателя в тока якоря генератора, а также сравнивают сигнал пропорциональный току возбуждения двигателя с сигналом, пропорциональным току якоря генератора и воздействуют разностным сигналом на систему регулирования тока возбуждения электродвигателя 3.
Однако этот способ может бьггь использован только при компактном расположении генератора и двигателя, так как электродвигатели постояниого тока мощностью 1000-500 кВт, требуемые Д1М бзфовых установок и больщинства экскаваторов и строительных кранов, могут быть выполнены только на относительно низкие налряжеш1я. Крочю того, применение индивидуальных генераторсш, неизбежшгх при нх выполнении На постоянном токе в таких механизмах, как буровые установки, экскаваторы и строительные краны, увеличивает мощность устанавливаемого оборудования и затрудняет резервирование. Недостатком этого способа является также и то, что он не учитывает ограничения режимов работы электропривода по условиям коммутации. Реализация этого способа потребует такхое второго источника питания, предпочтительно переменного тока, для питания систем регулирования тока Возбуждения.
Наиболее близким к изобретению по технической сущности является способ управления электроприводом постоянного тока, согласно которому измеряют ток якоря и ток возбуждения электродвигателя, напряжение на его якоре и напряжение питающей сети, из которого выделяют сигнал, пропорциональный амплитуде, при этом сигнал задания максимально допустимого тока якоря регулируют в функции измеренных сигналов тока возбуждения и напряжения на якоре, а величину тока возбуждения - в функции измеренного сигнала тока якоря, причем ограничение нижнего уровня тока возбуждения поддерживают постоянным, а верхний уровень изменяют в функции амплитуды напряжения питающей сети 4.
Устройство для реализации способа управления электроприводом постоянного тока, содержащее уп{%вляемые преобразователи в цепи якоря электродвигателя и его обмотки возбуждения, псюледовательно включенные задатчнк напряжения на якоре, регулятор напряжения и регулятор тока, ко входам которых подключены соответственно датчики напряжения и тока якоря, а также регулятор с блоком ограничения и датчик тока возбуждения, блок ограничения тока якоря, включенный в цепь обратной связи регулятора напряжения, к управляющему входу которого подключен сумматор, и два блока нелинейности.
Недостатком этих способа и устройства является неполный учет требований, возникающих при автономном питания или ограниченной мощности, которую надо подводить к рабо${м органам механизма, при ограничении мощности, подводимой к рабочим органам механизма, или реактивной мощности, потребляемой тирнсторным преобразователем при питаНИИ его от синхронного генератора соизмеримой мощности.
Цель изобретения - ограничение величины потребляемой электроприводом мощности автономного источника питания и ограничение мощности, подводимой к рабочему органу механизма.
Поставлеиная цель достигается тем, что в известном способе дополнительно определяют потребхгяемую электроприводом активную и реактивную мощность, сравнивают полученные сигналы с сигналами задания этих параметров, и при превышении активной мощностью допустимого значения ограничивают сигнал задания напряжения на якоре электродвигателя, а при превыщении реактивной мощностью допустимого уровня ограничивают сигнал задания на предельно допустимый ток якоря.
В устройстве поставленная цель достигается тем, что в него дополнительно введены датчики активной и реактивной мощности, задатчики допустимого уровня активной и реактивной мощности, трансформаторы тока и напряжения, два компаратора, транзистор, диодно-мостовая схема, и три резистора, при этом выход задатчика напряжения иа якоре соединен со входом мостовой схемы, три плеча которой образованы резисторами, а четвертое - диагональю переменного тока диодно-мостовой схемы, в диагональ постоянного тока которой включен переход коллектор- эмиттер транзистора, база которого соединена с одним из выходов первого компаратора, второй выход которого соединен с эмиттером транзистора, входы первого компаратора подключены к выходам задатчика допустимого уровня и датчика активной мощности, входы которого вместе со входами датчика реактивной мотцности подключены к выходам трансформаторов тока и напряжения, включенным на входе переменного тока вентильного преобразователя в цепи якоря электродвигателя, а выход датчика реактивной мощности вместе с выходом задатчика допустимого урювня реактивной мощности соединен со входами второго компаратора, выход которого подключен ко входу сумматора.
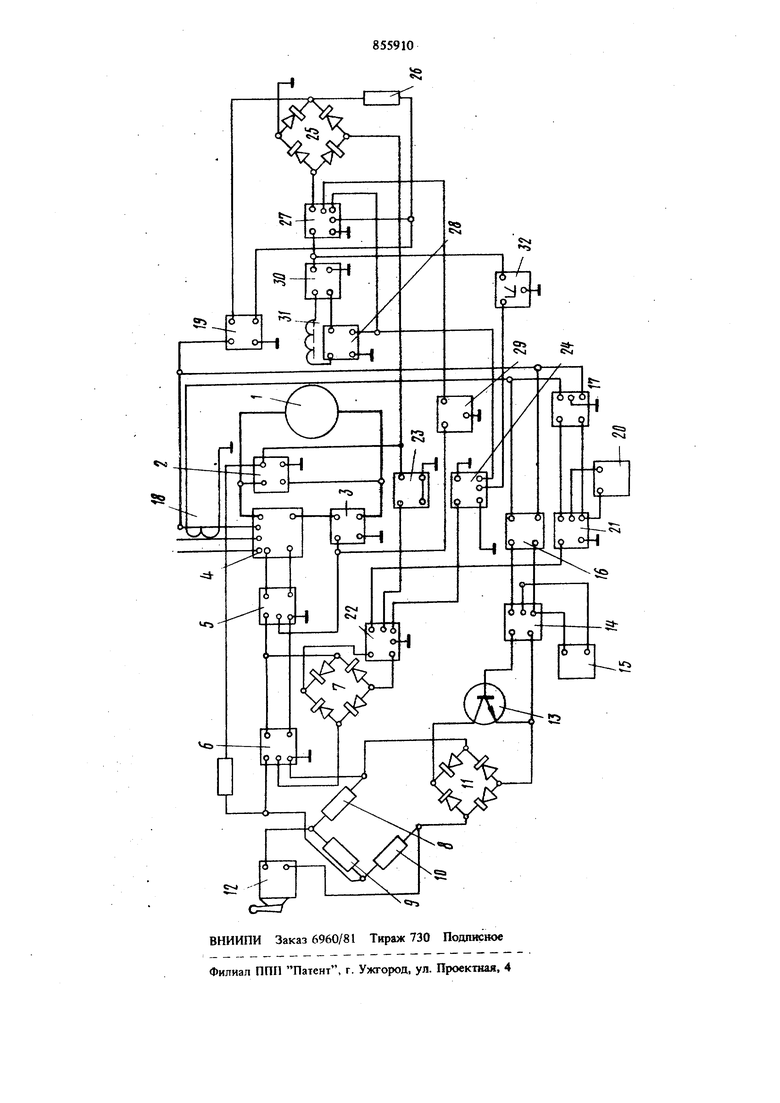
На чертеже приведена функциональная схема устройства.
Устройство содержит якорь 1 з;юктродвигателя, вход датчика 2 напряжения на якоре присоединен последовательно со входом датчика 3 тока якориой цепи к выходу тиристорного преобразователя 4. Вход тиристорного преобразователя 4 соединен с выходом регулятора 5 тока якоря, к первому входу которого подключен выход датчика 3 тока якоря. Ко второму входу регулятора 5 тока якоря присоединен выход регулятора 6 напряжения на якоре и один из входов переменного тока диодной мостовой схемы 7, выполняющей функции блока ограничения тока якоря, второй вход переменного тока которой соединен со входом регулятора 6 напряжения на якоре, к другим входам которого подJ соединены выход датчика 2 напряжения на якоре и выход мостовой схемы, образованной тремя равными ртзисторами 8-10, и диагональю переменного тока диодной мостовой схемы 11. К общей точке резисторов 8 и 9 присоединены один
Q из выходов задатчика 12 допустимого уровня напряжения на якоре. Второй вывод задатчика 12 присоединен к обшей точке резистора 10 и одного из входов переменного тока диодномостовой схемы 11, второй вход переменного
5 тока которой вместе с одним из выводов резисторов 8 присоединен к общей точке входов регулятора 6 напряжения. К положительному выводу ди одно-мостовой схемы 11 подключен коллекторный транзистора 13 проводиQ мости п-р-п,к отрицательному выводу диодномостовой схемы 11 присоединен эмигтерный вывод транзистора 13 и один из выходов первого компаратора 14. К первому входу компаратора 14 присоединен выход задатчика 15 до5 пустимого уровня напряжения, ко второму входу присоединен выход датчика 16 активной мощности. Входы датчика 16 активной и датчика 7 реактивной мощности присоединены к выходу трансформатора 18 тока и соединены со вхор дом датчика 19 амплитуды напряжения, питающего гиристорный преобразователь 4. Выход датчика 17 вместе с выходом задатчика 20 допустимого уровня реактивной мощности присоединен ко входу второго компаратора 21, выход которого присоединен к одному из входов сумматора 22, к двум другим входам которого подключены выходы блоков 23 и 24 нелинейности. К входу блока 23 нелинейности присоединен выход датчика 2 напряжения на якоре
и входы переменного тока диодно-мостовой схемы 25 (блока ограничения тока возбуждения), к положительному зажиму которой подключен положительный зажим датчика 19 и один из выводов резистора 26, второй вьгаод кото, рого соединен с одним из выводов регулятора 27 тока возбуждения и с отрицательным зажимом датчика 19. К другим входам регулятора 27 тока возбуждения присоединены отрицательный вывод диодно мостовой схемы 25, выход датчика 28 тока возбуждения и выход блока 29 нелинейности, вход которюго соединен с выходом датчика 3 тока якоря. К выходу регулятора 27 тока возбуждения присоединен вход управляемого преобразователя 30, к выходу
которого подключена последовательно со входом датчика 28 тока возбуждения обмотка 3 возбуждения электродвигателя 1. Первичная обмотка трансформатора 18 тока включена последовательно в один фазовый провод сети по785
ременного тока, питающей преобразователь 3, к той же фазе присоединен вход датчика 19 амплитуды напряжения. Между выходом регулятора 27 тока возбуждения и входом блока 24 нелинейности включен блок 32 нелинейности. Устройство работает следующим образом. При отсутствии сигнала на выходе задатчика 12 напряжения нет сигнала задания иа входах регулятора 6 напряжения на якоре, регулятора 5 тока якоря и преобразователя 3. Позтому отсутствует сигнал на выходе преобразователя 3, на выходе датчика 2 напряжения, на якоре и на выходе трансформатора 18 тока. Следовательно, ток возбуждения, определяемый напряжением на выходе блока 29 нелинейноети, минимален и минимально напряжение на выходе датчика 28 тока возбуждения, что определяет небольшое напряжение на выходе сумматора 22. Отсутствие сигнала на выходе трансформатора 18 тока обуславливает отсутствие сигнала на выходе датчиков 16 и 17 активной и реактивной мощности компараторов 14 и 21, закрытое состояние транзистора 13, что определяет работу мостовой схемы, состоящей из резисторов 8-10, и диодно-мостовой схемы 11. в качестве делителя. При появлении сигнала задания на выходе задатчика 12 половина зтого сигнала поступает на вход регулятора 6 напряжения, напряжение на выходе которого ограничено сначала небольшой величиной, обусловленной небольшим напряжением на выходе сумматора 22, приложенным встречно к выходам постоянного тока диодно-мостовой схемы 7 Под действием зтого напряжения появляется сигнал на входах и выходах регулятора 5 тока якоря, преобразователя 4, датчиков 2 и 3, за счет чего образуются необходимые для стабильной работы привода обратные связи по току якоря и напряжению. Появление сигнала на выходе датчика 3 до выбора зазора в передачах и слабин в канатах не приводит к большому току, вследствие чего выбор зазоров в передачах произвегдится с малым моментом, т.е. ограниченной силой удара после окончания зтого режима. Появление тока в якорной цепи злектродвигателя обуславливает появление небольшого сигнала на выходе трансформатора 18 тока и небольишх сигналов на выходе датчика 16 активной мощности 3лек тродвигателя и датчика 1 реактивной мощности электродвигателя. Так как сигналы на выходе датчиков 16 и 17 активной и реактивной мощности в зтом режиме меньше, чем сигналы на выходе задатчиков 15 и 20 допустимого уровня соответственно активной и реактивной мощности на входе пре образователя 3, то на выходе компараторов 14 и 21 сигналы отсутствуют.
Сигнал на выходе датчика 19 амплитуды напряжения, питаюшего тиристорный преобразователь 2, обуславливает протекание тока по резистору 26, падение от зтого тока запирает выход диодно-мостовой схемы 25, вследствие чего в этом режиме отсутствует связь между выходом датчика 2 напряжения и входом регулятора 27 тока возбуждения. После окончания выбора зазоров или слабин канатов ток в якорной цепи электродвигателя 1 становится больнш и под действием этого тока якорной цепи происходат увеличение сигнала на выходе блока 29 нелинейности и, следовательно, сигнала на входе и выходе регулятора 27 тока возбуждения и преобразователя 30. Увеличение сигнала на выходе регулятора 27 тока возбуждения и преобразователя 30 в этом режиме обуславливается пониженным (вследствие электромагнитной инерционности обмотки 31 возбуждения электродвигателя О сигналом обратной связи тока возбуждения. Под действием увеличенного напряжения на выходе преобразователя 30 начинается рост тока в обмотке 31 возбуждения и сигнала на выходе датчика 28 тока возбуждения. Одновременно происходит появление напряжения на выходе блока 32 нелинейности. Под действием увеличивающегося сигнала на выходе датчика 28 тока возбуждения и блока 2 нелинейности происходит увеличение сигнала на выходе сумматора 22 и дальнейший рост сигналов на выходе регуляторов 5 н 21 тока якорной цепи и тока возбуждения. По мере роста тока возбуждения растет сигнал на выходе датчика 28 тока возбуждения, а суммарный сигнал на входе регулятора 27 тока возбужденмя уменьшается, что приводит к постепенному уменьшению прямого влияния величины напряжения на выходе регулятора 27 тока возбуждения на напряженй., на выходе сумматора 22. Положительная связь, действующая по контуру; выход датчиков тока якоря 3 - вход блока 29 нелинейности - выход блока 29 нелинейности вход регулятора тока возбуждения - выход регулятора тока возбуждения 27 - блок 32 нелинейности - сумматор 22-диодно-мостовая схема 7 - регулятор 6 напряжения - регулятор тока якоря - преобразователь 6 - датчик 3 тока якоря, обеспечивает надежное и быстрое нарастание тока возбуждения к тока якорной цепи после окончания выбора зазоров в передачах. Действие этой положительной обратной связи снижается с уменьшением форсировки на выходе регулятора 27 тока возбуждения вследствие действия более сильной обратной связи по току возбуждения, подаваемой с выхода датчика 28 тока возбуждения, Таким образом, осуществляется адаптация контура регулирования момента, т.е. тока якоря и тока возбуждения, а следовательно, магистрального потока, к условиям до и после окончания выбора зазора. При росте тока иа выходе преобразователя 3 растет на первом этапе разгона электродвигателя реактивная мощность, потребляемая преобразователем, что оказывает отрицательное влияние на нагрев статорной и роторной обмот ки генератора, питающего преобразователь, а также вызывает искажение формы напряжения, что опасно для друтих преобразователей, питающихся от данного генератора. Это отрицательное явление устраняется в данном изобретении следующим образом. Сигнал, пропордаональный реактивной мощности, получаемый на выходе датчика 17 реактивной мощности, сравнивается на входе компаратора 21 с сигналом, определя ющим максимально допустимое значение этой мощности. При питании от данного генератора только одного преобразователя сигнал задания постоянен, а во всех других случаях определяется суммарной реактивной мощностью, потребляемой другими преобразователями от этого и других, параллельно с ним работающих генераторов. Сигнал на выходе компаратора 21 пропорционален превыщсник) фактического потреблеиия реактивной мощности над заданным уров нем и воздействует на вход сумматора 22 таким образом, что ограничивает напряжение на выходе регулятора 6 напряжения, ограничивая тем самым потребляемую преобразователем 3 реактивную мощность. По мере разгона электродвигателя 1 растет напряжение на его якоре и активная мощность, потребляемая преобразователем 3. При этом растет сигнал на выходе датчика 16 активной мощности. Когда этот сиг нал на входе компаратора 14 станет больше, чем сигнал на выходе задатчика 15 допустимого уровня активной мощности, то на выходе этого компаратора появляется напряжение, пропорциональное разности этих сигналов. Под дей ствием этого напряжения, приложенного к переходу база - эмиттер транзистора 13, уменьщается сопротивление перехода эмиттер - коллектор этого транзистора, что приводит к появ лению связи между входом регулятора 6 напряжения и выходом задатчика 12 напряжения, уменьцкнию напряжения на выходе преобразователя 3 и ограничению потребляемой преобразователем 3 активной мощности. Одновремечио с разгоном якоря электродвигателя 1 и ростом напряжения на выходе преобразователя 3 происходит увеличение напряжения на выходе блока 23 нелинейности, вследствие чего и в соответствии с законами, определяющими допустимую величину тока якоря, уменьшается напряжение на выходе сумматора 22, регулятора 6 напряжения и тока якоря электродвигателя 1. Поэтому уменьщается сигнал на выходе датчика 3 тока якоря, блока нелинейЬости 29 и входе регулятора 27 тока возбуждения, что обуславливает после спадания тока якоря ниже номинального дальнейший разгон 8 10 электродвигателя до скорости, определяемой минимальным значением тока возбуждения, задаваемого блоком 29 нелинейности. С началом тормозного режима ток якорной цепи меняег знак. При переходе его значения через ноль исчезает сигнал задания на входе регулятора 27 тока возбуждения, что приводит к дальнейщему снижению тока возбуждения, напряжения на выходе сумматора 22 и, следовательно, тока якоря и момента. Поэтому уменьшается сигнал на выходе датчика 3 тока якоря, блока 29 нелинейности и ьходе регулятора 27 тока возбуждения, что обуславливает после спадания тока якоря ниже номинального дальнейший разгон электродвигателя до скорости, определяемой минимальным значением тока возбуждения, задаваемого блоком 29 нелинейности. Поэтому выбор зазоров в передачах или слабнн канатов производится при пониженном значении момента, что уменьшает силу ударов. ПосЛе начала тормозного режима происходит изменение знака активной мощности и знак сигнала на выходе датчика 16 активной мощности начинает совпадать по знаку с сигналом задатчика 16 допустимого уровня активной мощности, компаратор 14 в этом режиме не образует на своем выходе сигнала, отпирающего транзистор 13, и в этом важном для ограничения динамичрских усилий в механизме режиме мощность торможения не ограничивается, что позволяет существенно уменьшить вероятность поломок колонны бурильных труб или передач. Реактивная составляющая полной мощности в этом режиме не меняет знака и ограничение тока якоря по зтому критерию действует согласно описанному. Дальнейшее торможение определяется соотношением сигналов на выходе датчиков напряжения 2 и амплитуды напряжения 19. При чрезмерно быстром нарастании ЭДС якоря 1, напряжения и тока якорной цепи или глубоком снижении напряжения питания может произойти опрокидывание инверторного режима. Это явление устраняется за счет того, что если сигнал на выходе датздка 2 напряжения становится больше сигнала на выходе датчика 19 амплитуды напряжения, то на выходе постоянного тока диодно-мостовой схемы 25 появляется сигнал, который огра1шчивает ток. Формула изобретения 1. Способ управления электроприводом постоянного тока, согласно которому измеряют ток якоря и ток возбуждения электродвигателя, напряжение на его якоре и напряжение питающей сети, из которого выделяют сигнал. ропорциональный амплитуде, при этом сигнал
зайания максимального допустимого тока якоря регулируют в функции измеренных Сигналов тока возбуждения и напряжения на якоре, а величину тока возбуждения - в функции измеренного сигнала тока якоря, причем ограничение нижнего уровня тока возбуждения поддерживают постоянным, а верхний уровень изменяют в фзнкции амплитуды напряжения питающей сети, отличающийся тем, что, с целью ограничения величины потребляемой электроприводом мощности автономного источника питания и ограничения мощности, подводимой к рабочему органу механизма, определяют потребляемую электроприводом активную и реактивную мощность, сравнивают полученные сигналы с сигналами задания этих параметров, и при превыщении активной мощностью допустимого значения ограничивают сигнал задания напряжения на якоре электродвигателя, а при превышении реактивной мощностью допустимого уровня ограничивают сигнал задания на предельно допустимый ток якоря.
2. Устройство для реализации способа по п. 1 содержащее управляемые преобразователи в цепи якоря электродвигателя и его обмотки возбуждения, последовательно включенные задатчик напряжения на якоре, регулятора напряжения и регулятор тока, ко входам которых подключены cooTBeTCTBetmo датчики напряжения и тока якоря, а также регулятор с блоком ограничения и датчик тока возбуждения, блок ограничения тока якоря, включенный в цепь обратной связи регулятора напряжения, к управляющему входу которого I подключен сумматор, и два блока нелинейности, отличающееся тем, 410, с целью ограничения величины потребляемой электроприводом мощности автономного источника питания и мощности, подВОДИМОЙ к рабочему органу механизма, в него введены датчики активной и реактивной мощности, задатчшси допустимого уровня активной и реактивнш мощности, трансформаторы тока и напряжения, два компаратора, транзистор, диодно-мостовая схема и три резистора, при этом выход задат жка напряжения на якоре соединен со входом мостовой схемы, три плеча которой образованы резисторами,, а четвертое - диагональю переменного тока диодно-мостовой схемы, в диагональ постоянного тока которой включен переход коллектор - эмиттер транзистора, база которого соединена с одним из выходов первого компаратора, второй выход которого соединен с эмиттером транзистора, входы первого компаратора подключены к выходам задатчика допустимого уровня и датчика активной мощности, входы которого вместе со входами датчика реактивной мощности подключены к выходам трансформаторов тока и напряжения, включенным на входе переменного тока вентильного преобразователя в цепи якоря электродвигателя, а выход датчика реактивной мощности вместе с выходом задатчика допустимого уровня реактивной мощности соединен со входами второго компаратора, выход которого подключен ко входу сумматора.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 2005680, кл. 21 с 59/35, 1973.
2.Патент Японии N 49-34406, кл. 55 С 2Ш.З, Н 02 Р 7/00, 1974.
3.Авторское свидетельство СССР № 341694, кл. В 60 L 11/04, 1965.
4.Авторское свидетельство СССР № 568131, кл. Н 02 Р 5/26, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU771835A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1975 |
|
SU556547A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Способ управления электроприводом постоянного тока и устройство для управления электроприводом постоянного тока | 1979 |
|
SU860249A2 |