Изобретение относится к области авиастроения и предназначено для создания летательных аппаратов с несущими винтами дл взлета и посадки по вертикали.
Целью изобретения является снижение вера и габаритов системы и повышение ее надежности, а также исключение изменения циклического угла установки лопастей в позиции маршевого воздушного винта, а
также повышение технологических характеристик и эксплуатационной технологичности.
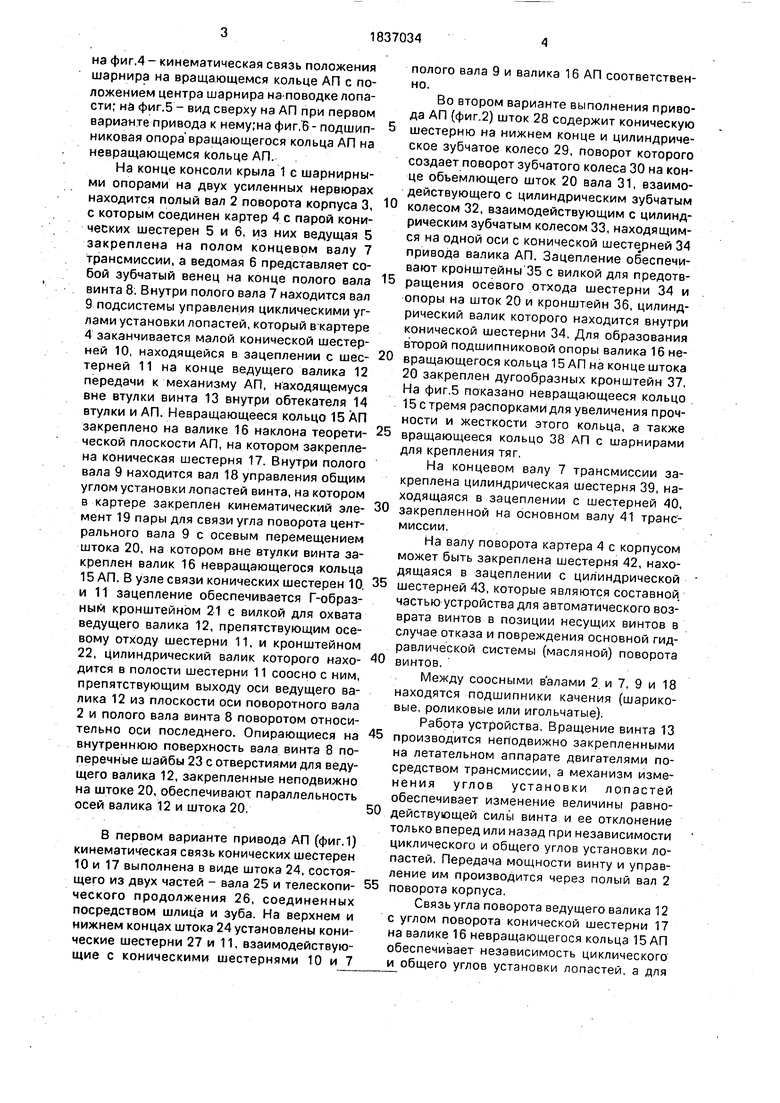
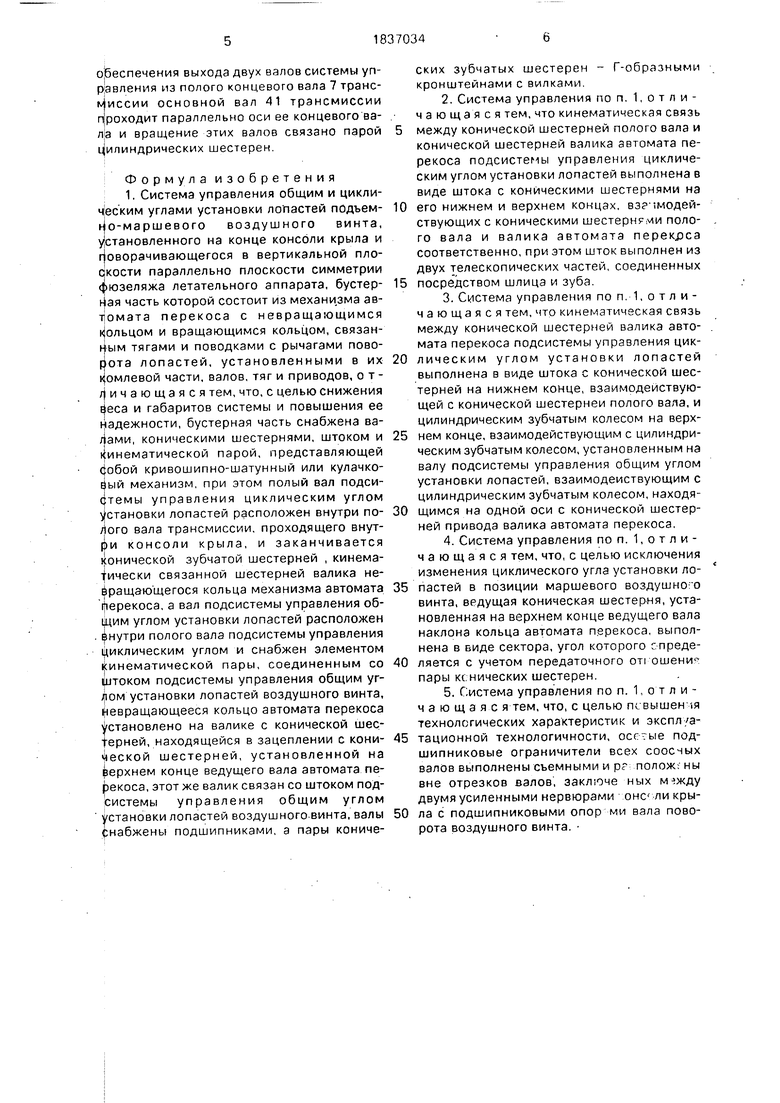
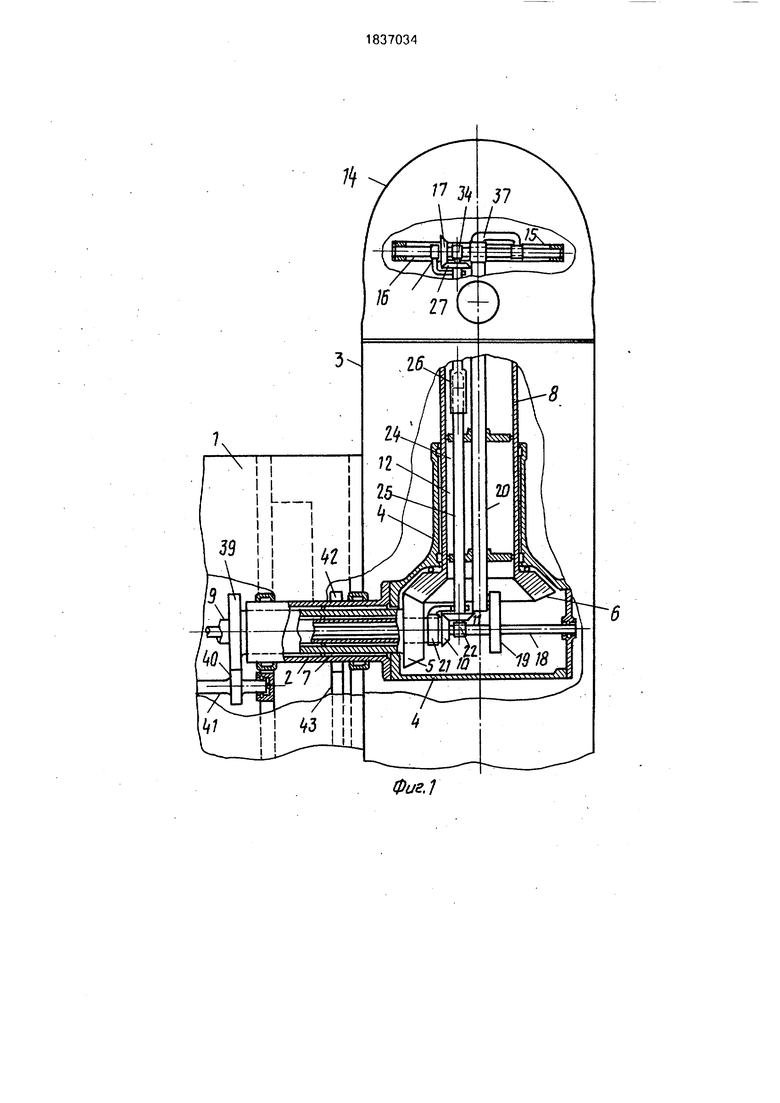
На фиг. 1 показан вид сверху на концевую часть крыла с поворотным корпусом в положении, ког-да винт в позиции маршевого винта; на фиг.2 - механизм автомата перекоса (АП) по п.2 формулы; на фиг.З - вид сверху на втулку четырехлопастного винта;
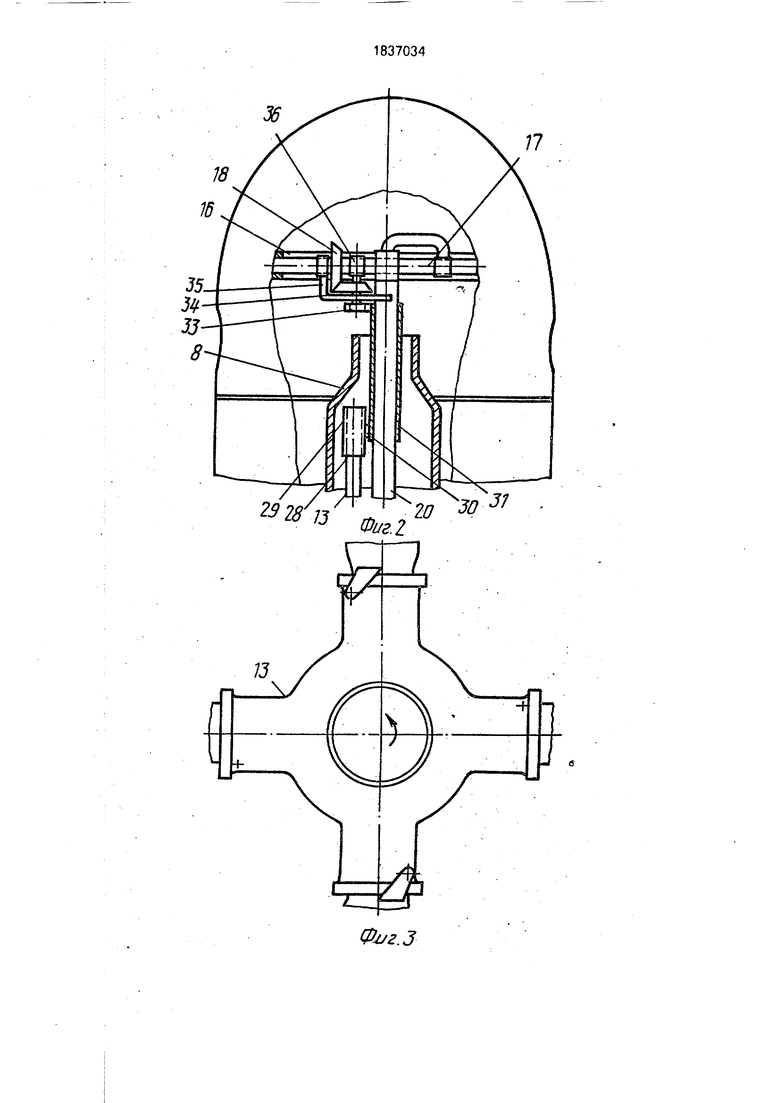
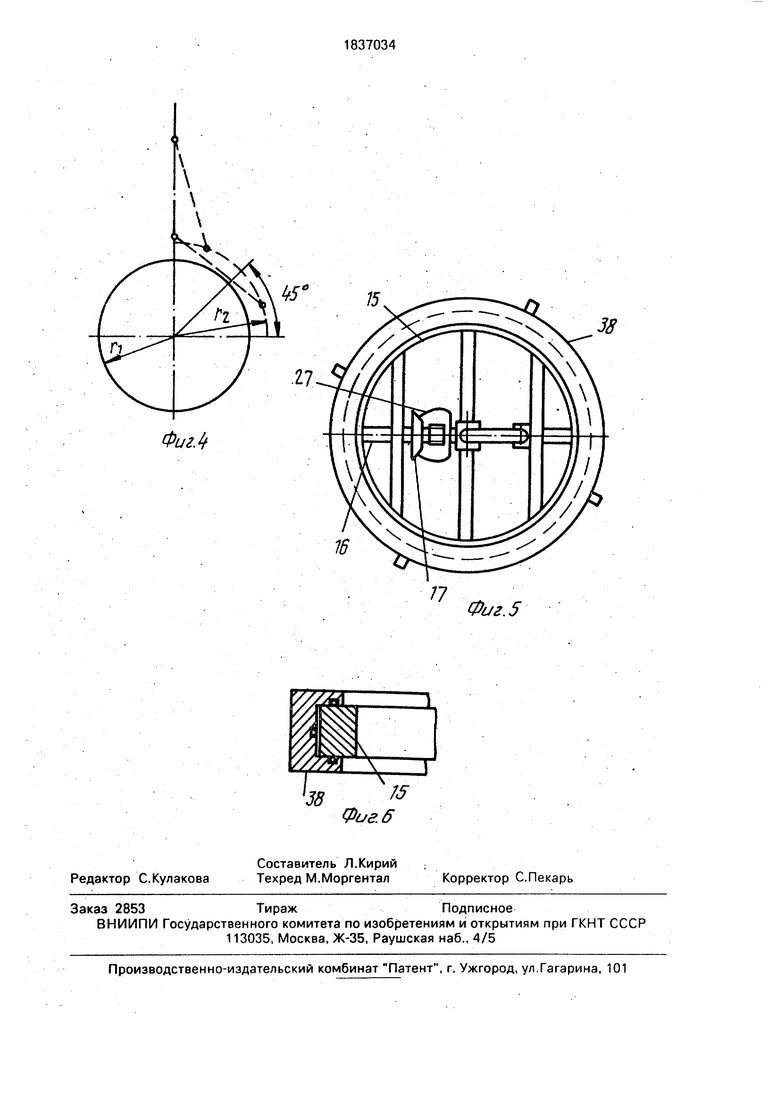
на фиг.4 - кинематическая связь положения шарнира на вращающемся кольце АП с положением центра шарнира на-поводке лопасти; на фиг.5 - вид сверху на АП при первом варианте привода к нему;на фиг.Б - подшипниковая опора вращающегося кольца АП на невращающемся кольце АП.
На конце консоли крыла 1 с шарнирными опорами на двух усиленных нервюрах находится полый вал 2 поворота корпуса 3, с которым соединен картер 4 с парой конических шестерен 5 и б, из них ведущая 5 закреплена на полом концевом валу 7 трансмиссии, а ведомая 6 представляет собой зубчатый венец на конце полого вала винта 8. Внутри полого вала 7 находится вал 9 подсистемы управления циклическими углами установки лопастей, который в картере 4 заканчивается малой конической шестерней 10, находящейся в зацеплении с шестерней 11 на конце ведущего валика 12 передачи к механизму АП, находящемуся вне втулки винта 13 внутри обтекателя 14 втулки и АП. Невращающееся кольцо 15 АП закреплено на валике 16 наклона теоретической плоскости АП, на котором закреплена коническая шестерня 17. Внутри полого вала 9 находится вал 18 управления общим углом установки лопастей винта, на котором в картере закреплен кинематический элемент 19 пары для связи угла поворота центрального вала 9 с осевым перемещением штока 20, на котором вне втулки винта закреплен валик 16 невращающегося кольца 15 АП. В узле связи конических шестерен 10. и 11 зацепление обеспечивается Г-образ- ным кронштейном 21 с вилкой для охвата ведущего валика 12, препятствующим осевому отходу шестерни 11, и кронштейном 22, цилиндрический валик которого находится в полости шестерни 11 соосно с ним, препятствующим выходу оси ведущего валика 12 из плоскости оси поворотного вала 2 и полого вала винта 8 поворотом относительно оси последнего. Опирающиеся на внутреннюю поверхность вала винта 8 поперечные шайбы 23 с отверстиями для ведущего валика 12, закрепленные неподвижно на штоке 20, обеспечивают параллельность осей валика 12 и штока 20.
В первом варианте привода АП (фиг.1) кинематическая связь конических шестерен 10 и 17 выполнена в виде штока 24, состоящего из двух частей - вала 25 и телескопического продолжения 26, соединенных посредством шлица и зуба. На верхнем и нижнем концах штока 24 установлены конические шестерни 27 и 11, взаимодействующие с коническими шестернями 10 и 7
полого вала 9 и валика 16 АП соответственно.
Во втором варианте выполнения привода АП (фиг.2) шток 28 содержит коническую
шестерню на нижнем конце и цилиндрическое зубчатое колесо 29, поворот которого создает поворот зубчатого колеса 30 на конце объемлющего шток 20 вала 31, взаимодействующего с цилиндрическим зубчатым
колесом 32, взаимодействующим с цилиндрическим зубчатым колесом 33, находящимся на одной оси с конической шестерней 34 привода валика АП. Зацепление обеспечивают кронштейны 35 с вилкой для предотв5 ращения осевого отхода шестерни 34 и опоры на шток 20 и кронштейн 36, цилиндрический валик которого находится внутри конической шестерни 34. Для образования второй подшипниковой опоры валика 16не0 вращающегося кольца 15 АП на конце штока 20 закреплен дугообразных кронштейн 37, На фиг.5 показано невращающееся кольцо 15 с тремя распорками для увеличения прочности и жесткости этого кольца, а также
5 вращающееся кольцо 38 АП с шарнирами для крепления тяг.
На концевом валу 7 трансмиссии закреплена цилиндрическая шестерня 39, находящаяся в зацеплении с шестерней 40,
0 закрепленной на основном валу 41 трансмиссии.
На валу поворота картера 4 с корпусом может быть закреплена шестерня 42, находящаяся в зацеплении с цилиндрической
5 шестерней 43, которые являются составной частью устройства для автоматического возврата винтов в позиции несущих винтов в случае отказа и повреждения основной гидравлической системы (масляной) поворота
0 винтов.
Между соосными в алами 2. и 7, 9 и 18 находятся подшипники качения (шариковые, роликовые или игольчатые).
Работа устройства. Вращение винта 13
5 производится неподвижно закрепленными на летательном аппарате двигателями посредством трансмиссии, а механизм изменения углов установки лопастей обеспечивает изменение величины равно0 действующей силы винта и ее отклонение только вперед или назад при независимости циклического и общего углов установки лопастей. Передача мощности винту и управление им производится через полый вал 2
5 поворота корпуса.
Связь угла поворота ведущего валика 12 с углом поворота конической шестерни 17 на валике 16 невращающегося кольца 15 АП обеспечивает независимость циклического и общего углов установки лопастей, а для
о беспечения выхода двух валов системы управления из полого концевого вала 7 транс- м|иссии основной вал 41 трансмиссии Проходит параллельно оси ее концевого ва- л|а и вращение этих валов связано парой Цилиндрических шестерен.
Формула изобретения 1. Система управления общим и циклическим углами установки лопастей подъем- н|о-маршевого воздушного винта, установленного на конце консоли крыла и Поворачивающегося в вертикальной плоскости параллельно плоскости симметрии фюзеляжа летательного аппарата, бустер- н|ая часть которой состоит из механизма автомата перекоса с невращающимся Дельцом и вращающимся кольцом, связан- йым тягами и поводками с рычагами поворота лопастей, установленными в их омлевой части, валов, тяг и приводов, о т - /|ичающаяся тем, что, с целью снижения еса и габаритов системы и повышения ее Надежности, бустерная часть снабжена ва- 4ами, коническими шестернями, штоком и Кинематической парой, представляющей 4обой кривошипно-шатунный или кулачко- механизм, при этом полый вал подси- управления циклическим углом установки лопастей расположен внутри по- /ioro вала трансмиссии, проходящего внутри консоли крыла, и заканчивается фонической зубчатой шестерней , кинематически связанной шестерней валика не- ращаю щегося кольца механизма автомата гЦрекоса, а вал подсистемы управления общим углом установки лопастей расположен нутри полого вала подсистемы управления Циклическим углом и снабжен элементом кинематической пары, соединенным со IUTOKOM подсистемы управления общим уг- ом установки лопастей воздушного винта, (вращающееся кольцо автомата перекоса становлено на валике с конической шесерней, находящейся в зацеплении с кони- |)еской шестерней, установленной на верхнем конце ведущего вала автомата пе- екоса, этот же валик связан со штоком подсистемы управления общим углом становки лопастей воздушного.винта, валы набжены подшипниками, а пары конических зубчатых шестерен - Г-образными кронштейнами с вилками.
2.Система управления по п. 1, о т л и - чающаяся тем, что кинематическая связь
5 между конической шестерней полого вала и конической шестерней валика автомата перекоса подсистемы управления циклическим углом установки лопастей выполнена в виде штока с коническими шестернями на
0 его нижнем и верхнем концах, взаимодействующих с коническими шестернями поло- , го вала и валика автомата перекоса соответственно, при этом шток выполнен из двух телескопических частей, соединенных
5 посредством шлица и зуба.
3.Система управления по п. 1, о т л и - чающаяся тем, что кинематическая связь между конической шестерней валика автомата перекоса подсистемы управления цик0 лическим углом установки лопастей выполнена в виде штока с конической шестерней на нижнем конце, взаимодействующей с конической шестерней полого вала, и цилиндрическим зубчатым колесом на верх5 нем конце, взаимодействующим с цилиндрическим зубчатым колесом, установленным на валу подсистемы управления общим углом установки лопастей, взаимодействующим с цилиндрическим зубчатым колесом, находя0 щимся на одной оси с конической шестерней привода валика автомата перекоса,
4.Система управления поп. 1, о т л и - чающаяся тем, что, с целью исключения изменения циклического угла установки ло5 пастей в позиции маршевого воздушного винта, ведущая коническая шестерня, установленная на верхнем конце ведущего вала наклона кольца автомата перекоса, выполнена в виде сектора, угол которого спреде0 ляется с учетом передаточного OTI ошени пары конических шестерен.
5.Система управления по п. 1, от л и - ч а ю щ а я с я тем, что, с целью псвышенчя технологических характеристик и экспл/а5 тационной технологичности, подшипниковые ограничители всех соосных валов выполнены съемными и р полож; ны вне отрезков валов, заключе ных двумя усиленными нервюрами онс ли кры0 ла с подшипниковыми опор ми вала поворота воздушного винта.
36
18
W
я&п
77
Фиг. 2
: 
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2014 |
|
RU2580344C2 |
| Главный редуктор соосной схемы привода несущих винтов легкого или сверхлегкого вертолета | 2023 |
|
RU2824002C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| ОБЪЕДИНЕННЫЙ ОПОРНЫЙ ПОДУЗЕЛ УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2113378C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| ТОРОИДАЛЬНЫЙ ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108267C1 |
Изобретение относится к области авиастроения. Цель изобретения - снижение веса (и габаритов системы и повышение ее надежности, а .также исключение измене- нип циклического угла установки лопастей в позиции маршевого воздушного- винта, а также повышение технологических характеристик и эксплуатационной технологично- CT|I, Система управления содержит буотерную часть, состоящую из механизма автомата перекоса с невращающимся кольцом и вращающимся кольцом, связанным тягами и поводками с рычагами поворота лопастей, установленными в их комлевой , валов, тяг и приводов. Полый вал под- сифтемы управления циклическим углом ус- тайовки лопастей расположен внутри полого вала трансмиссии, проходящего внутри консоли крыла, и заканчивается конической зубчатой шестерней, кинематически связанной с конической шестерней валика невращающегося кольца механизма автомата перекоса. Вал подсистемы управления общим углом установки лопастей расположен внутри полого вала подсистемы управления циклическим углом и снабжен элементом кинематической пары, соединенным со штоком подсистемы управления общим углом установки лопастей воздушного винта. Невращающееся кольцо автомата перекоса установлено на валике с конической шестерней, находящейся в зацеплении с конической шестерней,установленной на верхнем конце ведущего вала автомата перекоса, этот же валик связан со штоком под- системы управления общим углом установки лопастей воздушного винта. Валы сообщены подшипниками, пары конических зубчатых шестерен снабжены Г-образными кронштейнами с вилками. Имеются варианты выполнения кинематической связи между конической шестерней полого вала и конической шестерней валика автомата перекоса. 4 з.п. ф-лы, 6 ил. Ё 00 со VI о со
Фиг.ЗФцгА
16
38Я
Фиг.б
Фиг. 5
