Изобретение относится к авиационной технике и может быть применено в конструкциях несущих винтов вертолетов, конвертопланов и самолетов вертикального взлета и посадки, включая беспилотные.
Предметом нижеследующего рассмотрения являются воздушные винты летательных аппаратов, в которых реализуется возможность управляемого изменения угла установки лопастей в процессе вращения винта. Автомат перекоса является механизмом, реализующим эту возможность. Он обеспечивает циклическое, синхронизированное с вращением винта синусоидальное изменение угла установки по трем параметрам: по амплитуде синуса, по азимутальной ориентации максимума синуса, а также по величине постоянной составляющей синусоидальной функции. Этим реализуется соответствующее трехпараметрическое управление средним по азимуту значением вектора тяги воздушного винта, необходимое для управления полетом.
Все применяемые в вертолетах варианты автомата перекоса основаны на использовании механизма эксцентрика торцевого действия с управляемым значением вектора торцевого эксцентриситета. Под торцевым эксцентриситетом здесь понимается величина торцевого биения диска с управляемым перекосом его плоскости относительно оси вращения и управляемым смещением его относительно оси. В практике вертолетостроения (а также ниже но тексту) этот диск называется тарелкой (см., например, ДУДНИК В.В. «Конструкция вертолетов», Ростов-на-Дону, 2005 г.). Причем даже в казалось бы совершенно оригинальной схеме автомата перекоса типа «Паук» (см. там же) мы имеем все тот же торцевой эксцентрик, выродившийся, за счет уменьшения диаметра, в вал.
Рассмотрим в качестве прототипа конструктивный вариант с явно выраженной тарелкой. Центр тарелки совмещен с осью вала воздушного винта и соединен с неподвижным основанием силовой установки посредством карданного шарнира, ползуна и двухзвенника, называемого также шлиц-шарниром, которым обеспечивается фиксация тарелки по вращению вокруг оси вала винта. Имеются три тяги управления. Одна из них управляет осевым перемещением ползуна (и тарелки), т.е. общим шагом винта, а две других управляют перекосом тарелки, т.е. величиной и азимутальной ориентацией циклического шага винта. Связь не вращающейся тарелки с вращающимися лопастями винта осуществляется посредством тяг, присоединенных одним концом к поводкам, установленным на комлях соответствующих лопастей, а другим концом присоединенных к наружному кольцу тарелки, надетому на тарелку посредством подшипника качения. При этом указанное кольцо застопорено по вращению относительно вала винта с помощью второго шлиц-шарнира (двухзвенника).
Общепризнанными недостатками такой схемы автомата перекоса (и в целом втулки воздушного вина) являются:
а) сложность конструкции, обусловленная большим количеством подвижных соединений,
б) большая высота втулки, и, как следствие, повышенное аэродинамическое сопротивление летательного аппарата, что обусловлено наличием двух ярусов тяг, длина которых не может быть уменьшена по кинематическим соображениям,
в) большая масса конструкции втулки, обусловленная необходимостью передавать большие крутящие моменты через вал малого диаметра.
Некоторое упрощение достигается заменой кардана шаровым шарниром, а также заменой шлиц-шарниров жесткими пальцами-водилами (пат. РФ №2397113, Сикорски Эакрафт Корп., 2006-2010 г.). Но все это не дает радикального решения проблемы, а только свидетельствует об ее актуальности.
Целью изобретения является устранение вышеперечисленных недостатков конструкции втулки воздушного винта с автоматом перекоса.
Прежде чем сформулировать сущность изобретения, необходимо оговорить смысл некоторых используемых ниже понятий.
Под двухосным шарниром ниже имеется в виду шарнир, обеспечивающий возможность вращения двух соединяемых им деталей относительно двух из трех ортогональных осей координат. При этом вокруг третьей координатной оси вращение заблокировано. Шарнир, обладающий таким свойством, также называется карданным шарниром.
Если же обеспечивается возможность вращения вокруг всех трех ортогональных осей, такой шарнир будем называть трехосным. Он также называется шаровым или универсальным.
Обычно упомянутые выше шарниры не имеют возможности поступательного взаимного перемещения соединяемых деталей, или она присутствует в виде небольшого люфта. Однако каждый из указанных шарниров может быть специально наделен возможностью небольшого поступательного взаимного перемещения соединяемых деталей, если это необходимо по кинематическим соображениям.
Предлагается втулка воздушного винта с автоматом перекоса, выполненным в виде расположенной у оси вала воздушного винта тарелки с управляемыми приводами ее перемещения вдоль оси вала и отклонения ее плоскости по двум углам. Причем указанная тарелка связана с поводками, закрепленными на комлях лопастей винта, посредством периферийного кольца, соединенного с тарелкой посредством подшипника. Цель изобретения достигается тем, что вал винта выполнен в виде силового кольца, охватывающего тарелку автомата перекоса. Причем тарелка имеет три распределенных по окружности отверстия, через которые пропущены три соответствующих винта, соединенных с закрепленными на неподвижном основании приводами управления. При этом гайки винтов расположены в указанных отверстиях тарелки и соединены с тарелкой посредством двухосных (т.е. карданных) шарниров, каждый из которых имеет возможность свободного перемещения вдоль одной из указанных осей, которая направлена вдоль радиуса тарелки. Кроме того, указанное периферийное кольцо тарелки соединено с поводком одной из лопастей винта посредством трехосного (т.е. шарового) шарнира, имеющего возможность свободного перемещения вдоль одной из осей шарнира, которая ориентирована вдоль радиуса периферийного кольца тарелки. При этом с поводками остальных лопастей кольцо тарелки связано посредством трехосного шарнира, имеющего подвижность в двух координатах вдоль плоскости тарелки. При такой схеме автомата перекоса устраняется необходимость в тягах и шлиц-шарнирах. Автомат перекоса располагается в одной плоскости с лопастями винта. Т.о. конструкция упрощается, уменьшается ее высота, уменьшается ее аэродинамическое сопротивление.
Привод вращения винта с втулкой такой конструкции целесообразно выполнить посредством зубчатого венца, закрепленного на вышеуказанном силовом кольце. При этом уменьшается масса конструкции втулки винта, т.к. устраняется длинный и тяжелый вал привода воздушного винта, а момент силы передается на винт на большом радиусе (известно, что масса трансмиссии пропорциональна произведению ее длины на передаваемую силу, которая, при том же моменте, обратно пропорциональна радиусу сечения вала).
В одном из возможных вариантов конструктивного выполнения втулки, крестовина указанного выше карданного шарнира соединения гайки винта управления с периферийным кольцом тарелки автомата представляет собой два цилиндрических штифта с пересекающимися под прямым углом осями. Причем один из указанных штифтов вставлен в радиально ориентированное отверстие в кольце тарелки с возможностью осевого скольжения, а второй из указанных штифтов, имеющий меньший диаметр, вставлен в поперечное отверстие первого штифта и выполняет функцию вышеуказанной гайки механизма управления автоматом перекоса. Такая конструкция карданного шарнира компактнее, прочнее и технологичнее карданных шарниров традиционной схемы. И это также существенно влияет на надежность и эксплуатационный ресурс автомата перекоса.
Изобретение поясняется нижеследующим детальным описанием вариантов конструктивного выполнения и семью фигурами.
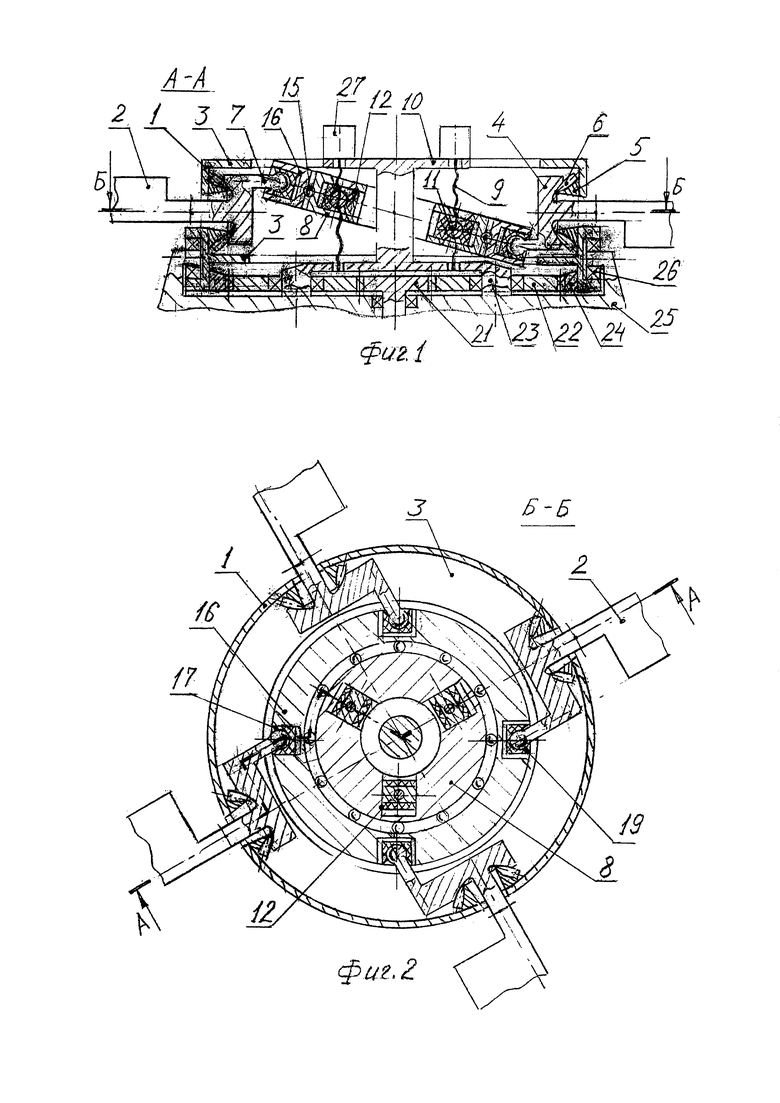
На фиг. 1 изображен общий вид предлагаемой втулки воздушного винта с автоматом перекоса (разрез ломаной плоскостью А-А, показанной на фиг. 2).
На фиг. 2 дана вторая проекция - разрез плоскостью Б-Б, показанной на фиг. 1.
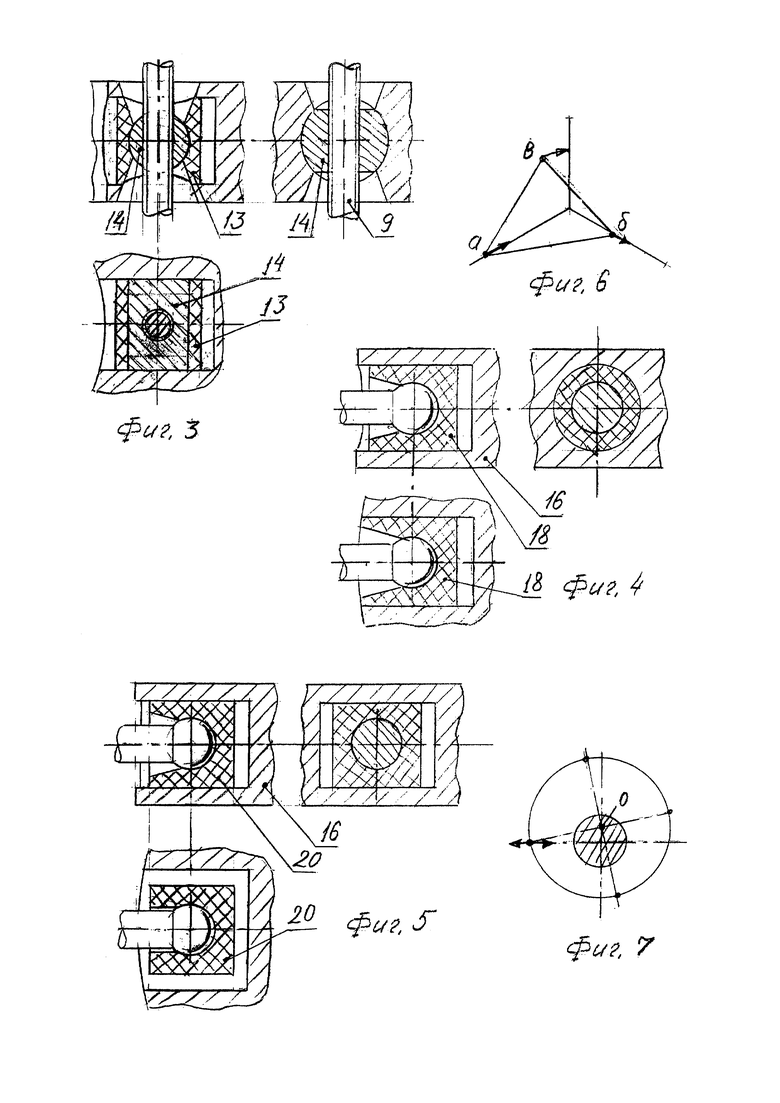
На фиг. 3 изображена в трех проекциях конструкция двухосного (карданного) шарнира, которым осуществлено соединение гайки с винтом управления автоматом перекоса.
На фиг. 4 изображена в трех проекциях конструкция трехосного (шарового) шарнира, с однокоординатной радиальной подвижностью, посредством которого осуществлено соединение наружного кольца тарелки автомата перекоса с поводком одной из лопастей воздушного винта.
На фиг. 5 изображена в трех проекциях конструкция трехосного шарнира, имеющего двухкоординатную подвижность, посредством которого осуществлено соединение всех остальных лопастей воздушного винта, кроме одного.
На фиг. 6 изображена схема, поясняющая кинематические особенности функционирования шарнирных соединений тарелки автомата перекоса с винтами управления.
На фиг. 7 изображена схема, поясняющая кинематические особенности функционирования шарнирных соединений периферийного кольца с поводками лопастей воздушного винта.
Предлагаемая втулка воздушного винта содержит силовое кольцо 1 (фиг. 1), на котором шарнирно закреплены лопасти 2. Оно выполняет функцию вала воздушного винта, посредством которого осуществляется передача крутящего момента от двигателя. Также через силовое кольцо 1 осуществляется замыкание центробежных сил между лопастями. Поэтому для уменьшения его массы желательно иметь не менее четырех лопастей, чтобы исключить работу силового кольца на изгиб. Этой же задаче служат ребра жесткости 3, через которые силовые потоки могут передаваться по направлениям хорд окружности силового кольца. Шарнирное соединение лопастей с силовым кольцом в изображенном на фиг. 1 частном варианте конструкции осуществляется посредством сферических упорных подшипников качения, образованных комлем 4 лопасти, кольцом 5 и роликами 6 коноидной формы. Поводок 7 управления лопастью смещен в сторону задней кромки профиля лопасти, чем обеспечивается нужный знак обратной связи в функции компенсации взмаха (заметим, что поводок 7 расположен на меньшем радиусе втулки винта, чем ось «О» шарнира).
Внутри силового кольца 1 расположена тарелка 8 автомата перекоса. Через равномерно распределенные по окружности тарелки отверстия проходят три соответствующих винта управления 9, соединенные с жестко закрепленными на неподвижном основании 10 втулки серводвигателями, связанными с тремя независимыми каналами системы управления летательного аппарата. Гайки 11 винтов соединены с тарелкой 8 посредством карданных шарниров 12, установленных с возможностью небольшого радиального перемещения относительно тарелки 8. В данном варианте конструктивного выполнения каждый из трех карданных шарниров 12 содержит цилиндрической формы штифт 13 (фиг. 3) с поперечным отверстием, в которое вставлен штифт 14 меньшего диаметра. Он выполняет функцию гайки, входящей в зацепление с винтом управления 9. Т.о. штифты 13 и 14 выполняют функцию крестовины карданного шарнира, обеспечивая возможность качания тарелки 8 относительно винта 9 по двум углам. Заодно обеспечивается стопорение гайки (= штифта 14) по вращению относительно оси винта. Радиальное перемещение карданного шарнира 12 относительно тарелки 8, необходимое для компенсации сокращения расстояния между гайками при наклонах тарелки 8, обеспечивается за счет перемещения штифта 13 в радиальном отверстии увеличенной длины. Концы штифта 14 сделаны сферическими. Они упираются в цилиндрическую поверхность отверстия под штифт 13, чем устраняется подвижность карданного шарнира вдоль окружности тарелки 8.
На тарелке 8 автомата перекоса посредством, шарикоподшипника 15, закреплено периферийное кольцо 16, которое, в свою очередь соединено с поводками 7 лопастей посредством трехосных, т.е. шаровых, шарниров. При этом один из указанных шарниров - шарнир 17, выполнен с возможностью небольшого радиального перемещения вдоль радиуса кольца 16, чем обеспечивается однозначность позиционирования периферийного кольца 16 вдоль окружности. Он содержит вкладыш 18 (фиг.4) с цилиндрической внешней поверхностью, вставленный в круглое радиальное отверстие кольца 16 с возможностью свободного осевого перемещения. Остальные же лопасти соединены с кольцом 16 посредством шарниров 19 (фиг. 5), у которых наружная поверхность вкладыша 20 имеет форму параллелепипеда. Вкладыш 20 вставлен в паз с плоскими стенками, чем обеспечивается возможность двухкоординатного перемещения параллельно плоскости кольца 16. Это необходимо для компенсации небольших смещений тарелки 8 автомата перекоса при разных ее наклонах.
В частном варианте выполнения втулки воздушного винта привод вращения винта осуществляется посредством редуктора, входящего в конструкцию самой втулки. Редуктор содержит расположенную в центре втулки ведущую шестерню 21, соединенную посредством нескольких шестерен 22, установленных на неподвижных осях 23, с зубчатым венцом 24, закрепленным на силовом кольце 1 втулки воздушного винта. Т.о. образуется многопоточная передача, в которой вращающий момент создается силой, приложенной на многократно большем радиусе, по сравнению с радиусом сечения обычно применяемых на вертолетах валов. Соответственно, при этом многократно уменьшается величина передаваемой силы, необходимая для создания требуемого крутящего момента и, соответственно, уменьшается вес трансмиссии. Редуктор может быть закреплен на нижней части 25 неподвижного основания втулки воздушного винта. В частности, это может быть фюзеляж летательного аппарата, или, непосредственно, стенка поршневого двигателя, например звездообразного. В последнем случае шестерня 21 может располагаться непосредственно на конце коленвала. Верхняя часть 10 неподвижного основания может быть закреплена на осях 23 шестерен 22 редуктора.
Силовое кольцо втулки воздушного винта в частном варианте выполнения может быть установлено на роликах 26, закрепленных на неподвижном основании 25 и взаимодействующих с беговой дорожкой, выполненной на поверхности силового кольца 1. Возможно вместо роликов 26 применить подшипник качения большого диаметра.
Управление работой автомата перекоса предлагаемой схемы отличается от традиционных тем, что каналы управления общим и циклическим шагом воздушного винта механически не разделены. Их разделение осуществляется системой автоматического управления летательного аппарата программным путем. При этом все три серводвигателя 27 (на фиг. 1 их видно только два), работают одинаково, осуществляя изменение высоты одной из трех точек тарелки автомата перекоса. Как известно, заданием высоты трех точек плоскости однозначно определяется ее положение в пространстве как по высоте, так и по обоим углам наклона, а следовательно, имеется возможность независимого управления общим и циклическим шагом винта, т.е. всеми параметрами вектора тяги воздушного винта.
Остается доказать, что работа описанного механизма возможна не только в приближении малых углов отклонения тарелки 8, но и при больших углах. Т.е. требуется доказать, что в механизме не возникнет повышенных люфтов и заеданий при высоких требованиях к точности его работы.
На фиг. 6 неправильным треугольником изображено расположение центров гаек 11, задаваемое жестким положением осей винтов управления 9 при некотором случайном наклоне тарелки 8. Тремя лучами, расположенными под 120 градусов, изображено положение осей радиальных отверстий в тарелке, с которыми требуется совместить треугольник при любой форме его искажения. Очевидно, что одну сторону треугольника всегда можно совместить с указанными лучами. Если далее двигать две вершины «а» и «б» треугольника по лучам в направлении стрелок (см. фиг. 6), то вершина «в» будет двигаться по траектории, пересекающейся с третьим лучом. Это доказывает, что механизм управления тарелки будет работать без заеданий и без люфтов. При этом, однако, очевидно, что центр тарелки будет позиционироваться с отклонениями в некотором диапазоне. Соответственно будет смещаться и центр периферийного кольца. Поэтому следует еще доказать возможность одновременного совмещения наконечников всех поводков 7 с осями соответствующих шарниров 17 и 19 периферийного кольца 16. На фиг. 7 осевые линии обозначают положение поводков лопастей. Заштриховано поле возможного смещения центра периферийного кольца 16 при всевозможных наклонах тарелки 8. Четыре точки на окружности соответствуют положениям центров сферических наконечников водил лопастей. Очевидно, что одну точку можно всегда совместить с шарниром 17. Если затем перемещать центр тарелки в пределах заштрихованного поля, то остальные три точки будут ометать соответствующие свои окрестности. А поскольку остальные шарниры имеют свободу двухкоординатного перемещения, то выбором достаточного диапазона этого перемещения можно обеспечить, чтобы эти три точки не выходили за пределы зон своего двухмерного перемещения при любом перемещении центральной точки «о» тарелки в пределах заштрихованной зоны. Т.о. доказано обеспечение не заедания механизма. Безлюфтовость же следует из того, что положение плоской фигуры на плоскости задано однозначно, если задано положение одной из ее точек и фиксированная линия, на которой должна располагаться вторая точка плоской фигуры.
Таким образом доказана возможность корректной работы предлагаемого механизма при требуемых перемещениях автомата перекоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЁТ | 2018 |
|
RU2742513C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
Изобретение относится к области авиации, в частности к конструкциям несущих винтов винтокрылых летательных аппаратов. Втулка воздушного винта содержит автомат перекоса, выполненный в виде расположенной у оси вала винта тарелки с управляемыми приводами ее перемещения вдоль оси вала и отклонения ее плоскости по двум углам. Вал винта выполнен в виде силового кольца, охватывающего тарелку автомата перекоса. Тарелка имеет три распределенных по окружности отверстия, через которые пропущены три соответствующих винта, соединенных с закрепленными на неподвижном основании приводами управления. Гайки винтов расположены в отверстиях тарелки и соединены с тарелкой посредством двухосных карданных шарниров. Кольцо тарелки соединено с поводком одной из лопастей винта посредством трехосного шарового шарнира, имеющего возможность свободного перемещения вдоль одной из осей шарнира, которая ориентирована вдоль радиуса периферийного кольца тарелки, а с поводками остальных лопастей винта периферийное кольцо тарелки связано посредством трехосного шарового шарнира, имеющего подвижность в двух координатах вдоль плоскости тарелки. Обеспечивается уменьшение габаритных размеров втулки, улучшение ее обтекаемости, снижение массы конструкции. 2 з.п. ф-лы, 7 ил.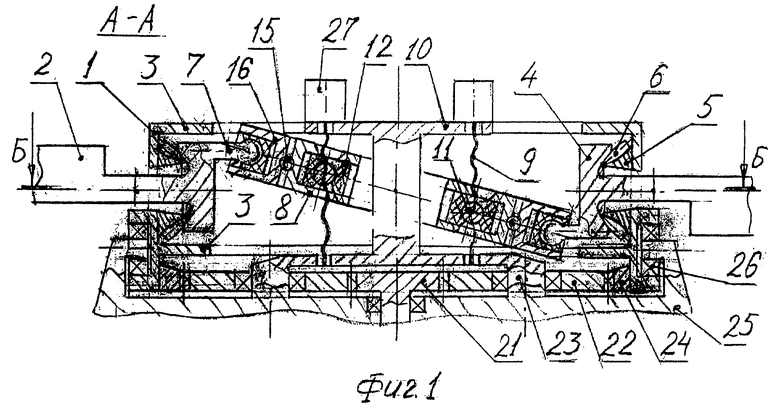
1. Втулка воздушного винта с автоматом перекоса, выполненным в виде расположенной у оси вала винта тарелки с управляемыми приводами ее перемещения вдоль оси вала и отклонения ее плоскости по двум углам, связанной с поводками, закрепленными на комлях лопастей винта, посредством периферийного кольца, соединенного с тарелкой посредством подшипника, отличающаяся тем, что вал винта выполнен в виде силового кольца, охватывающего тарелку автомата перекоса, а тарелка имеет три распределенных по окружности отверстия, через которые пропущены три соответствующих винта, соединенных с закрепленными на неподвижном основании приводами управления, причем гайки указанных винтов расположены в указанных отверстиях тарелки и соединены с тарелкой посредством двухосных карданных шарниров, каждый из которых имеет возможность свободного перемещения вдоль одной из указанных осей, которая направлена вдоль радиуса тарелки, а указанное кольцо тарелки соединено с поводком одной из лопастей винта посредством трехосного шарового шарнира, имеющего возможность свободного перемещения вдоль одной из осей шарнира, которая ориентирована вдоль радиуса периферийного кольца тарелки, а с поводками остальных лопастей винта периферийное кольцо тарелки связано посредством трехосного шарового шарнира, имеющего подвижность в двух координатах вдоль плоскости тарелки.
2. Втулка воздушного винта по п. 1, отличающаяся тем, что привод вращения винта содержит зубчатый венец, закрепленный на вышеуказанном силовом кольце.
3. Втулка воздушного винта по п. 1, отличающаяся тем, что крестовина указанного выше карданного шарнира соединения гайки винта управления с кольцом тарелки автомата перекоса представляет собой два цилиндрических штифта с пересекающимися под прямым углом осями, причем один из указанных штифтов вставлен в радиально ориентированное отверстие в кольце тарелки с возможностью осевого скольжения, а второй из указанных штифтов, имеющий меньший диаметр, вставлен в поперечное отверстие первого штифта, и выполняет функцию вышеуказанной гайки механизма управления автоматом перекоса.
| Аппарат для сортировки, подсчета и упаковки монет | 1946 |
|
SU69015A1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| УНИВЕРСАЛЬНЫЙ ШАРНИР ПОСТОЯННОЙ СКОРОСТИ ДЛЯ ВИНТА ВЕРТОЛЕТА | 2012 |
|
RU2607717C2 |
| АДСОРБЕР ДЛЯ ОЧИСТКИ ИЛИ РАЗДЕЛЕНИЯ ПОТОКА ГАЗА, СОДЕРЖАЩИЙ СЪЕМНУЮ СИСТЕМУ ЗАПОЛНЕНИЯ | 2019 |
|
RU2778060C2 |
| EP 1431177 B1, 26.10.2005. | |||

