Изобретение относится к авиационной технике, а именно к несущей системе вертолета с соосно расположенными двумя несущими винтами противоположного вращения.
Известна двухвинтовая несущая система с зеркальным расположением автоматов перекоса (RU 2383470, 10.03.2010), содержащая редуктор с двумя соосными полыми валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, цепи согласованного управления общим, дифференциальным и циклическим шагом каждого из несущих винтов, включающие два автомата перекоса. При этом внутри вращающегося вала верхнего винта, выполненного с возможностью осевого перемещения вниз относительно ступицы приводной шестерни редуктора, введена полая неподвижная колонна. Внутри колонны проходят тяги управления циклическим шагом, в верхней части колонны установлен автомат перекоса верхнего винта, а его скользящее кольцо связано тягой с дополнительным скользящим кольцом, установленным в нижней части колонны. Элементы управления верхним винтом установлены на валу и на колонне так, что перемещение вала вниз происходит без демонтажа системы управления или редуктора, а приведение в рабочее состояние - без дополнительной регулировки системы управления.
Известна также несущая система вертолета (RU 2412081, 20.02.2011) с сооснорасположенными несущими винтами противоположного вращения, содержащая редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных тягами между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой управления общим и дифференциальным шагом. Втулки несущих винтов выполнены с торсионным креплением лопастей и разнесенными горизонтальными шарнирами в виде шаровых опор. Суммирующая рычажная система включает две пары двуплечих рычагов и ползун. Первая пара рычагов расположена под нижним автоматом перекоса, вторая пара рычагов и ползун - на донной части корпуса редуктора. Один из рычагов каждой пары закреплен к корпусу редуктора, другой шарнирно к нему подвешен. Ползун смонтирован в цилиндрической полости редуктора, продольная ось которой совмещена с осью вала верхнего несущего винта. Подвешенные рычаги каждой пары соединены соответственно с нижним автоматом перекоса и ползуном. Посредством тяг и качалок подвешенные рычаги соединены с управлением дифференциальным шагом, а рычаги, закрепленные к корпусу редуктора, соединены с управлением общим шагом. Управление верхним несущим винтом выполнено посредством двуплечих качалок, смонтированных на валу верхнего несущего винта подвижно вдоль его оси и кинематически связанных с ползуном, верхним автоматом перекоса и поводками лопастей. В данной несущей системе управление верхним и нижним винтом связано механически.
Недостатком указанных технических решений является большее количество конструктивных элементов, что влечет за собой пониженную надежность относительно предлагаемого технического решения, увеличенный вес конструкции в целом и повышенную себестоимость изготовления и обслуживания. В случае патента RU 2383470 это вызвано тем, что верхний и нижний автоматы перекоса связаны между собой кинематически посредством сложной системы тяг и качалок с большим количеством подвижных частей. Также расположение тяг управления внутри полой неподвижной колонны ведет к увеличению диаметра данной колонны и, как следствие, увеличению диаметров валов верхнего и нижнего винтов, что ведет снижению полезной нагрузки, которую может поднять вертолет. В отношении патента RU 2412081 стоит отметить, ползун сложной конструкции для управления верхним несущим винтом по общему шагу, а также механическое ограничение угла опережения управления.
Целью заявляемого технического решения является повышение надежности сосной несущей системы вертолета, в том числе за счет уменьшения общего количества используемых деталей и узлов, удешевление производства и обслуживания вертолета в целом.
Технический результат достигается тем, что автоматы перекоса выполнены одинаковыми, что ведет к уменьшению номенклатуры изготавливаемых деталей, и упрощению обслуживания и регулировки несущей системы в целом, что ведет к снижению затрат.
Также отказ от механической связи между автоматами перекоса ведет к уменьшению количества тяг и качалок и, как следствие, к удешевлению производства и обслуживания.
Также в виду того что, автоматы перекоса не связаны кинематически, конструкция позволяет не вводить в конструкцию конструктивно угол опережения управления, а задать его в цифровом виде, и изменять его в соответствии с режимом полета, что ведет к снижению сложности и стоимости деталей и увеличению КПД на всех режимах полета.
Такая реализация несущей системы позволяет моделировать различные системы управления вертолетом:
- полное управление обоими винтами;
- управление по циклическому шагу только нижним винтом;
- управление по циклическому шагу только верхним винтом.
Это позволяет производить исследование плюсов и минусов систем управления на одной и той же несущей системы, что ведет к снижению затрат на испытания.
Применение электромеханических сервоприводов позволяет уменьшить число кинематических связей, что ведет к снижению количества деталей и удешевлению производства и обслуживания вертолета. А также позволяет сделать неподвижную колонну небольшого радиуса, что ведет к уменьшению диаметров валов, и как следствие, к снижению веса редуктора и несущей системы.
Применение в конструкции поводков управления, взамен более сложных конструктивно кожухов, ведет к снижению числа деталей и упрощению производства.
Изобретение поясняется чертежами, где:
- на фиг. 1 изображена предлагаемая соосная несущая система;
- на фиг. 2 изображена втулка несущего винта;
- на фиг. 3 изображен автомат перекоса.
Соосная несущая система состоит из верхнего несущего винта 1, нижнего несущего винта 2, автомата перекоса верхнего винта 3, автомата перекоса нижнего винта 4, стакана верхнего 5, стакана нижнего 6, верхней платформы 7, нижней платформы 8, валов 10, 13 и межвальной опоры 9, установленной для увеличения жесткости валов. Валы 10 и 13 редуктора расположены соосно и имеют противоположное вращение. Верхний несущий винт 1 смонтирован на валу 10 редуктора 11 посредством шлицевого соединения 12. Нижний несущий винт 2 смонтирован на валу 13 редуктора 11 посредством шлицевого соединения 14. Каждый из несущих винтов 1 и 2 состоит из втулки 15, в которую входит торсион 16, ступица 17, переходники 18, узлы динамической балансировки винта 19, поводки 20 и лопасти несущего винта. Невращающееся кольцо 21 автомата перекоса 3 и 4 устанавливается на стакан 5 и 6 соответственно. Посредством тяг 22 вращающееся кольцо 23 автомата перекоса 3 и 4 крепится к поводкам 20 лопасти. Невращающееся кольцо 21 автомата перекоса соединено с вращающимся кольцом 23 посредством подшипника качения 24. Невращающееся кольцо 21 автомата перекоса соединено посредством тяг 25 с качалками 26 с сервоприводами 27. Невращающееся кольцо 21 установлено на сферическом ползуне 28 и имеет возможность наклоняться относительно него. Сферический ползун 28 имеет возможность перемещаться вдоль стаканов 5, 6. Также на вращающемся кольце установлен шлиц-шарнир 29, который в свою очередь крепится к втулкам винтов 15. На невращающемся кольце 21 автомата перекоса также установлен невращающийся шлиц-шарнир 30, который в свою очередь крепится к диску сервоприводов 7 и 8. Верхний и нижний автоматы перекоса выполнены одинаковыми. Верхний автомат перекоса повернут относительно нижнего автомата перекоса на 180 градусов относительно горизонтальной плоскости.
Управление вертолетом в вертикальном направлении осуществляется за счет изменения общего шага на верхнем и нижнем винтах, управление в продольно-поперечном направлении осуществляется за счет изменения циклического шага на верхнем и нижнем винте, по курсу - за счет управления дифференциальным шагом винтов.
Управление общим шагом винтов осуществляется за счет синхронной подачи электрического сигнала на вход всех сервоприводов 27 и, как следствие, синхронного изменения угла установки качалок 26 сервоприводов 27 на один и тот же угол на верхнем автомате перекоса 3 и нижнем автомате перекоса 4. Так как качалки 26 сервоприводов посредством тяг 25 соединены с невращающимися кольцами 21, то невращающиеся кольца 21 и вслед за ним вращающееся кольца 23 автомата перекоса перемещаются в направлении оси вала 10 винта относительно втулок 15, за счет этого перемещения тяги 22 изменяют угол установки всех лопастей, т.к. они кинематически связаны с вращающимся кольцом 23.
Управление циклическим шагом осуществляется за счет синхронной подачи электрического сигнала на вход всех сервоприводов 27, и, как следствие, синхронного изменения углов установки качалок 26 сервоприводов 27, но на такие углы, чтобы обеспечить наклон невращающегося кольца 21 автомата перекоса относительно сферического ползуна 28, и вслед за ним вращающегося кольца 23, которое посредством тяг 22 циклически изменяет углы установки лопастей на каждом обороте.
Управление дифференциальным шагом осуществляется за счет различного изменения общего шага на верхнем 1 и нижнем 2 несущих винтах.
Конструкция АП позволяет изменять конструкцию несущих винтов (лопасти, втулки) в широких диапазонах, не боясь изменения потребного угла опережения, т.к. автоматы перекоса не связаны кинематически.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| ВЕРТОЛЕТ | 2004 |
|
RU2263607C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |

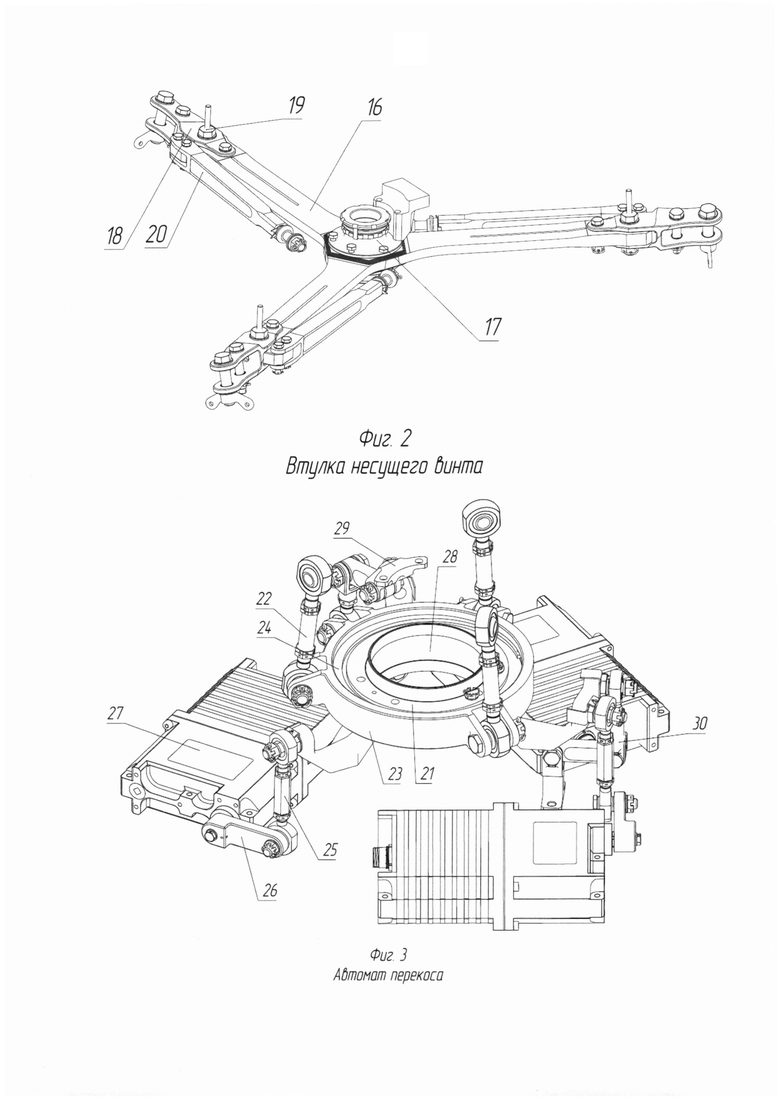
Изобретение относится к авиационной технике, а именно к конструкциям несущих систем вертолетов. Соосная несущая система содержит редуктор (11) с двумя соосно расположенными валами (10; 13) противоположного вращения, на которых смонтированы втулки (15) несущих винтов (1; 2). Втулки состоят из торсиона (16), ступицы (17), переходников (18), узлов (19) динамической балансировки винта, поводков (20) лопастей. Два подвижных в осевом направлении автомата перекоса (3; 4) кинематически связаны с тягами (22) управления лопастями. На стаканах (10; 13) установлены с разворотом на 180° автоматы перекоса (3; 4), которые являются идентичными, кинематически независимыми друг от друга. Втулки (15) крепятся к валам (10; 13) посредством шлицевого соединения (12; 14). Каждый автомат перекоса (3; 4) содержит невращающееся кольцо (21), установленное на сферическом ползуне (28), вращающееся кольцо (23), соединенное с невращающимся кольцом (21) посредством подшипника качения (24), на невращающемся кольце (21) установлены невращающиеся шлиц-шарниры (30), прикрепленные к верхней и нижней платформам (7; 8), на которых смонтированы сервоприводы (27), соединенные с невращающимся кольцом (21). Достигается повышение надежности сосной несущей системы вертолета, уменьшение общего количества узлов и деталей. 1 з.п. ф-лы, 3 ил.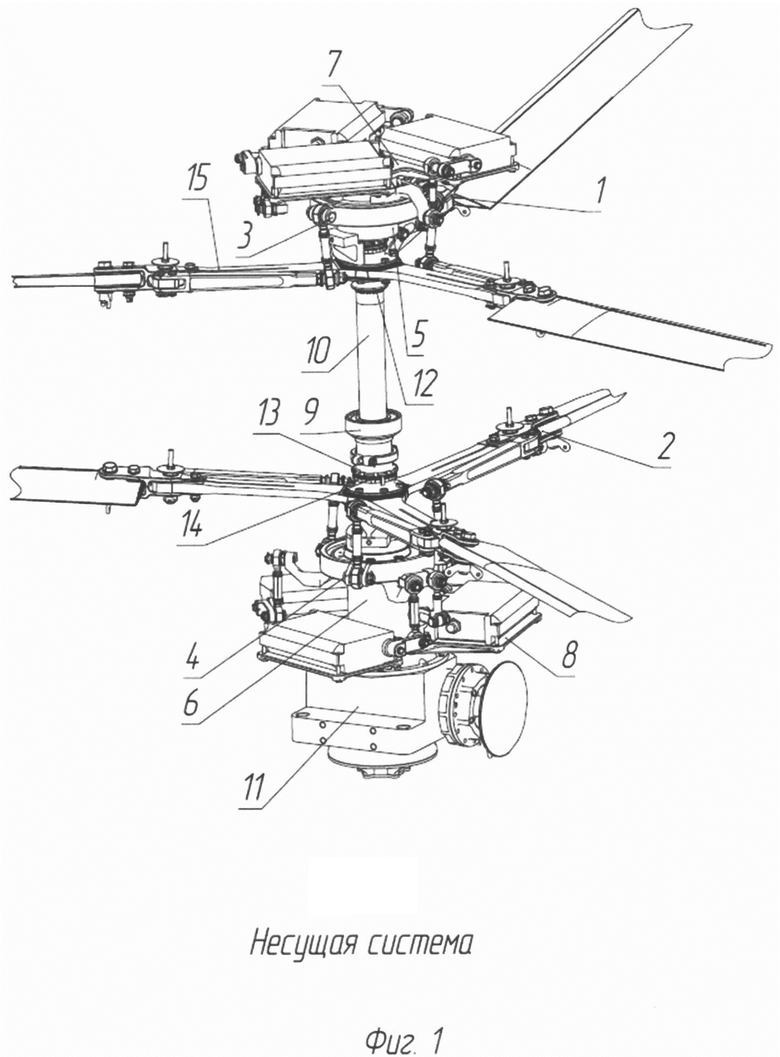
1. Соосная несущая система, содержащая редуктор (11) с двумя сооснорасположенными валами (10; 13) противоположного вращения, на которых смонтированы втулки (15) несущих винтов (1; 2), состоящих из торсиона (16), ступицы (17) переходников (18), узлов (19) динамической балансировки винта, поводков (20) лопастей, имеющая два подвижных в осевом направлении автомата перекоса (3; 4), кинематически связанных с тягами (22) управления лопастями, отличающаяся тем, что установленные с разворотом на 180° относительно горизонтальной плоскости на стаканах (10; 13) автоматы перекоса (3; 4) идентичны и кинематически независимы друг от друга, втулки (15) крепятся к валам (10; 13) посредством шлицевого соединения (12; 14), при этом каждый из автоматов перекоса (3; 4) содержит невращающееся кольцо (21), установленное на сферическом ползуне (28), вращающееся кольцо (23), соединенное с невращающимся кольцом (21) посредством подшипника качения (24), на невращающемся кольце (21) установлены невращающиеся шлиц-шарниры (30), прикрепленные к верхней и нижней платформам (7; 8), на которых смонтированы сервоприводы (27), соединенные с невращающимся кольцом (21) посредством тяг (25), качалок (26), а на вращающемся кольце (24) также установлен шлиц-шарнир (29), прикрепленный к втулкам (15) верхнего и нижнего несущих винтов (1; 2), сферический ползун (28) установлен на стаканах (5; 6) с возможностью свободного перемещения вдоль них, а валы (10; 13) дополнительно соединены между собой межвальной опорой (9).
2. Соосная несущая система по п. 1, отличающаяся тем, что поводки (20) выполнены в виде балок.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| US 20160200432 A1, 14.07.2016 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ ГЕРМЕТИЧНОЙ НИКЕЛЬ-ВОДОРОДНОЙ БАТАРЕИ | 1995 |
|
RU2084055C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |

