Изобретение относится к системам управления транспортными средствами и может быть использовано для управления коммунальным транспортом, например, же- л знодорожного или водного типа, в частно- сти поездами метрополитена или речными трамвайчиками.
Целью изобретения является повышение быстродействия,
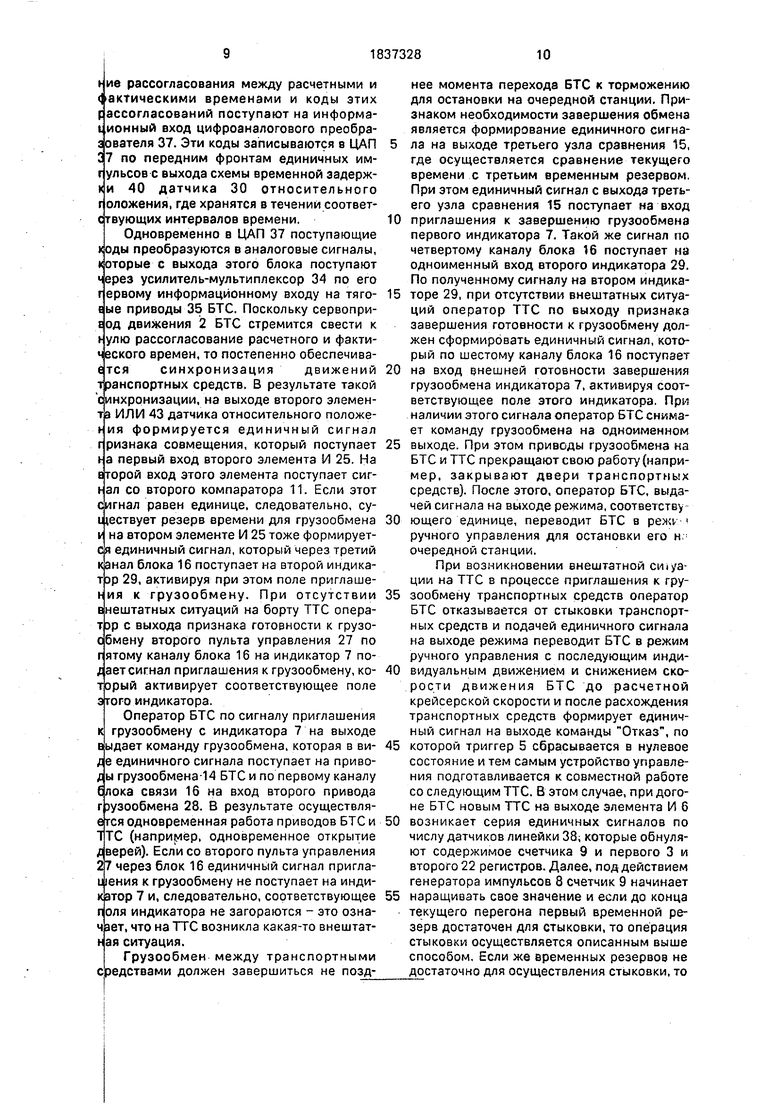
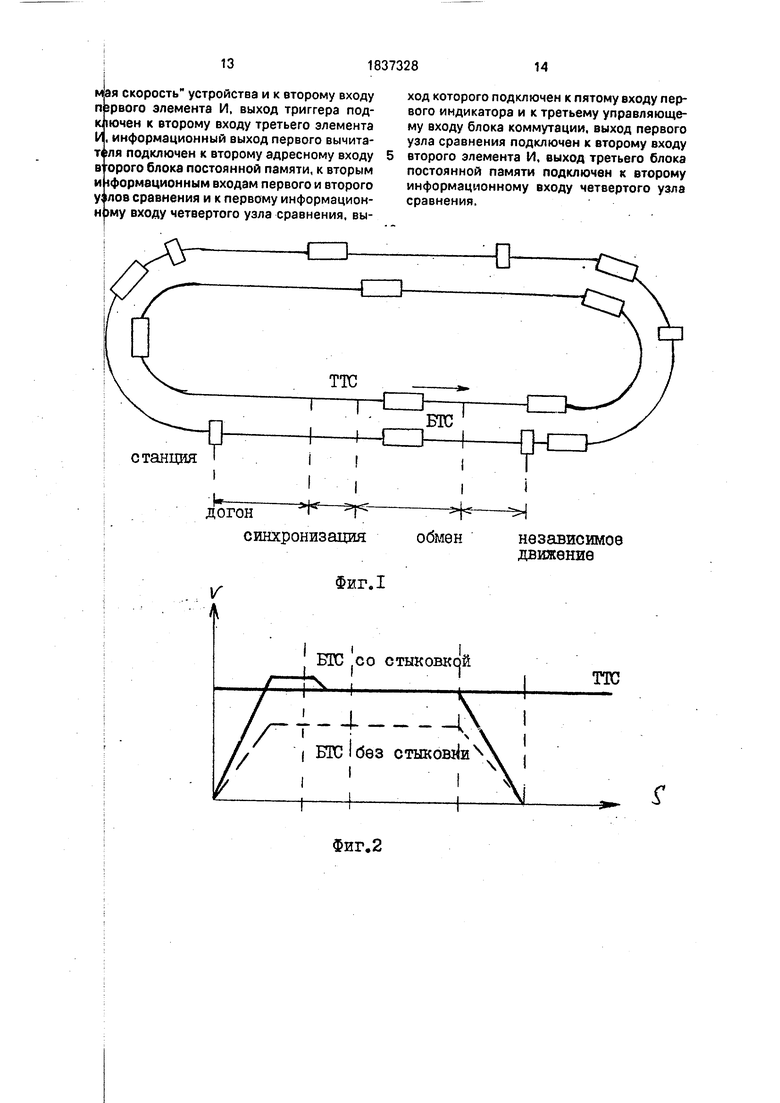
На фиг. 1 иллюстрируется схема движения транспортных средств; на фиг. 2 - диаг- РС мма скоростей транспортных средств на перегоне; на фиг. 3 - функциональная схема устройства управления движением системы транспортных средств; на фиг. 4 - схема сервопривода движения БТС; на фиг. 5 и 6 - ее ответственно конструктивная и функцио- нгльная схемы датчика относительного положения; на фиг. 7 - схема блока
определения расчетного времени; на фиг. 8 - схема измерителя фактического времени.
Устройство содержит размещаемые на борту каждого БТС вход/выход управления 1, сервопривод 2, первый регистр 3, блок определения скорости 4, триггер 5, злемент И 6, индикатор 7, генератор тактовых импульсов 8, первый счетчик 9, первый узел сравнения 10, второй узел сравнения 11, первый блок постоянной памяти 12, второй счетчик 13, первый привод грузообмена 14, третий узел сравнения 15, блок коммутации 16, первый вычитатель 17, второй вычита- тель 18, третий вычитатель 19, второй блок постоянной памяти 20, третий блок постоянной памяти 21, второй регистр 22, четвертый узел сравнения 23, элемент И 24, второй элемент И 25, маркер 26 положения, второй
СО
вход/выход управления 27, второй привод 28 грузообмена, второй индикатор 29.
Сервопривод движения 2 содержит датчик относительного положения 30, блок 31 определения расчетного времени, измери- тель 32 фактического времени, элемент 33 сравнения,усилитель 34 мультиплексор, тяговый привод 35.
Элемент сравнения 33 содержит блок 36 вычитания и цифроаналоговый преобра- зователь 37. Датчик относительного положения 30 содержит линейку датчиков маркера 38, элемент ИЛИ 39, схему 40 временной задержки, Т-триггер 41, шифратор 42, второй элемент ИЛИ 43.
Блок определения расчетного времени 31 включает четвертый блок 44 адресной памяти, первый 45 и второй 46 буферные регистры. Измеритель фактического времени 32 содержит второй генератор 47 импуль- сов, третий 48 и четвертый 49 буферные регистры, накапливающий счетчик 50.
Устройство работает следующим образом. В процессе внедрения устройства формируются блоки постоянной памяти 12, 20, 21 и 44. Перед эксплуатацией устройства триггер 5, регистр 3 и второй регистр 22, счетчик 13, счетчик 9 обнуляются. Цепи начального обнуления не показаны. Поскольку работа устройства управления на перегонах трассы аналогична, рассмотрим его работу на одном перегоне между двумя остановками БТС.
За счет работы устройства на предыдущем перегоне трассы и состояния останова БТС на станции на выходах режима, параметра скорости, команды движение и команды реализации обмена формируются соответственно единичный сигнал, нулевой аналоговый сигнал, нулевой сигнал и еди- ничный сигнал. На выходе команды отказ сформирован единичный сигнал, который перевел триггер 5 в нулевое состояние. Так как счетчик 9 сбрасывается в нулевое состояние лишь в случае догона БТС транзитным транспортным средством, то его содержимое к моменту останова БТС на станции равно промежутку времени от момента расстыковки транспортных средств или от момента догона БТС новым ТТС до останова и продолжает наращиваться на остановке. К моменту начала движения БТС от станции по новому перегону второй регистр 22 содержит код времени равный времени движения БТС по предыдущему перегону от момента догона его ТТС (или от момента расстыковки) до момента остановки БТС на станции, а в регистре 3 содержится код времени равный суммарному времени задержки БТС на предыдущем перегоне и стоянки
на станции. Это начальные значения указанных элементов формируются в процессе движения и останова на станции БТС по каждому перегону и их формирование будет описано далее.
Находясь на станции, оператор БТС следит за грузообменом и по его завершении или по истечении допустимого времени стоянки на выходе команды реализации обмена пульта управления 1 формирует нулевой сигнал, который поступает на привод грузообмена 14 БТС. В результате прекращается грузообмен на станции. После этого оператор БТС на выходе команды движение 1 формирует единичный сигнал, который поступает на счетный вход счетчика 13 и на входы записи регистров 3 и 22,
Счетчик 13 формирует номер следующего перегона. Этот номер перегона является адресом, по которому из памяти 12 выбираются коды второго и третьего резервов времен, которые поступают, соответственно, на вход третьего вычитателя 19, на первые входы второго 11 и третьего 15 узлов сравнения. Одновременно оператор БТС по выходам параметра скорости и режима формирует соответственные сигналы управления тяговым приводом БТС через усилитель мультиплексор 34 по его второму информационному входу и единичный управляющий сигнал, поступающий на управляющий вход усилителя мультиплексора 34.
В это время БТС перемещается под управлением оператора. Поскольку генератор импульсов непрерывно работает и его импульсы поступают на счетный вход счетчика 9, то последний наращивает свое значение. Коды содержимого счетчика 9 поступают на первый вход первого вычитателя 17 и на информационные входы первого 3 и второго 22 регистров. Поскольку на второй вход первого вычитателя 17с выхода первого регистра 3 поступает код времени задержки БТС, то на выходе первого вычитателя формируется чистое время движения БТС на. текущем перегоне. Эти коды поступают на первые входы первого 10, второго 11 и третьего 15 узлов сравнения, и на вход младшей группы адресных разрядов третьего блока памяти 21.
В третьем вычитателе 19 из второго временного резерва вычитается нормативное время синхронизации транспортных средств и таким образом получается код первого временного резерва. Этот код поступает на вторые входы узла сравнения 10 и второго вычитателя 18. На выходе первого узла сравнения формируется единичный сигнал при условии, что время движения БТС по данному перегону не превышает
первый временной резерв. Одновременно, нЈ выходе второго блока памяти 20 по результатам кодов, содержащихся в регистре 3 1 втором регистре 22, поступающих соответственно на входы младших и старших групп адресных разрядов, формируется код эквивалентной задержки БТС. Этот код поступает на первый вход второго вычитателя 1{, на выходе которого формируется код усеченного первого временного резерва.
Указанный код поступает на вход стар- ш эй группы адресных разрядов третьего 6; ока памяти 21. На выходе этого блока формируется код приглашения кдогону, коте рый поступает на одноименный вход ин- д(катора 7 и вход взведения триггера 5. В входной код третьего блока памяти 21 мо- жот иметь единичное значение только в слу- чг е предшествования догона БТС тр анзитным транспортным средством. Если этот код равен единице, то активизируется поле догона индикатора 7 и триггер 5 пере- всдится в единичное состояние и единич- нпй сигнал с триггера 5 поступает на вход Зс прета элемента запрета 6. Тем самым бло- Ki руется воздействие датчика относительного положения 30 на счетчик 9, первый 3 и второй 22 регистры вплоть до поступления кс манды отказ, которая означает отказ рабе ты оператора БТС с догнавшим его ТТС и ксторый переводит триггер 5 в нулевое состояние снимая тем самым блокировку е элемента запрета 6.
Перед этой блокировкой счетчик 9, ре- густр 3 и второй регистр 22 устанавливают- с в ноль единичным сигналом, который поступает на информационный вход эле- Mi гита запрета 6 со схемы временной задер- 40 датчика 30 относительного положения. Если же выходной код третьего б; ока памяти 21 имеет нулевое значение, то э1о означает, что либо после последней ко- м шды Отказ не было догона БТС новым Т С, либо означает что такой догон был, но к настоящему моменту уже не существует временных резервов для реализации сты- к вки и, если оператор БТС до настоящего MI мента не принял мер по организации стыке вки с этим ТТС, то с настоящего момента этих мер принимать уже нельзя, так как со- oi ветствующее время уже упущено и ему с/ едует подать команду Отказ с пульта уг равления 1.
При получении на индикаторе 7 сигнал приглашения кдогону оператор БТС по вы- хсду параметра скорости формирует такие атналы, поступающие на вход усилителя- мультиплексора, которые обеспечивают наращивание скорости БТС до скорости, превышающей скорость ТТС и движение
БТС в таком режиме вплоть до догона им ТТС. Если при движении по перегону БТС догоняет ТТС, то последний воспринимается по его маркеру 26 поочередно датчиками
линейки 28 сигналы с активированных датчиков линейки 38 попадают на соответствующие входы элемента ИЛИ 39 и на входы шифратора 42, где в целях сокращения разрядов унитарный код преобразуется во
0 взвешенный двоичный код. Кроме того, с выходов средних разрядов линейки датчиков 38 импульсы поступают на вход второго элемента ИЛИ 43, на выходе которого формируется признак совмещения транспорт5 ных средств.
В результате на выходе элемента ИЛИ 39 возникают единичные импульсные сигналы, которые поступают на счетный вход Т- триггера 41, и через схему временной
0 задержки 40 поступают на входы записи первого 45 и второго 46 буферных регистров блока 31 определения расчетного времени, на вход установки нуля накапливающего счетчика 50 измерителя фактического вре5 мени 32, на вход блока 4 и на информационный вход элемента И 6.
Одновременно коды смещения БТС относительно ТТС, поступающие с шифратора 42 на первый вход блока 31 определения
0 расчетного времени и значение кода, формируемое на выходе блока 4 определения относительной скорости, выдаваемое на вход четвертого компаратора 23 и на второй вход блока 31 определения расчетного вре5 мени, будут характеризовать, соответственно, текущее смещение и скорость БТС относительно ТТС. Изменением сигнала скорости движения с пульта управления 1 оператор подстраивает скорость движения
0 БТС к скорости ТТС.
Величина относительной скорости поступает на четвертый узел сравнения 23, где сравнивается с допустимой относительной скоростью движения поездов. Если эта ско5 рость лежит в допустимых пределах, то единичный сигнал с четвертого узла сравнения 23, поступает на второй вход элемента И 24. При наличии единичного сигнала на первом входе элемента И 24, т.е. при наличии соот0 ветствующего временного резерва на выходе первого элемента И 24 формируется единичный сигнал, который поступает на вход приглашения к стыковке индикатора 7 и активизирует соответствующее поле этого
5 индикатора, В режиме автоматической сты- ковки нулевой сигнал с выхода режима поступает на управляющий вход усилителя-мультиплексора 34. При этом, выход усилителя-мультиплексора 34 связывается с его первым входом. Таким образом,
включается в работу сервопривод движения 2 5ТС. Импульсы, поступающие с выхода элемента ИЛИ 39 на вход синхронизации блока 31 определения расчетного времени означает изменение состояния активности линейки датчиков 38, т.е. перемещение БТС относительно ТТС.
Интервалы между передними фронтами этих импульсов, представленные неизменным состоянием Т-триггера 41, характеризуют фактическое время смещения транспортных средств на величину, равную расстоянию между геометрическими центрами датчиков линейки 38. Сигналы с прямого выхода Т-триггера 41 поступают на входы чтения и запрета записи первого буферного регистра 45 блока 31 определения расчетного времени и входы чтения и записи, соответственно, третьего 48 и четвертого 49 буферных регистров измерителя фактического времени 32,
Сигналы с инверсного выхода Т-триггера 41 поступают на входы чтения и запрета записи второго буферного регистра 46 блока 31 определения расчетного времени и записи и чтения, соответственно, третьего 48 и четвертого 49 буферных регистров измерителя фактического времени 32. При этом, в блоке 31 определения расчетного времени по каждому нулевому сигналу на входах чтения и запрета записи первого буферного регистра 45, последний отключается от выходной шины блока 31 определения расчетного времени.
По фронту единичного сигнала записи с соответствующей ячейки адресной памяти 44 блока 31 определения расчетного времени в первый буферный регистр 45 записывается расчетное время изменения активности линейки датчиков 38 датчика 30 относительного положения. Этот код хранится в первом буферном регистре 45 и выдается на выходную шину блока 31 определения расчетного времени в течении следующего временного интервала сохранения активности линейки датчиков 38, определяемого единичным сигналом на входе чтения первого буферного регистра 45.
Во время чтения первый буферный регистр 45 закрыт для записи. В это время запись очередного кода расчетного времени происходит во второй буферный регистр 46, который по управляющим сигналам чтения и запрета записи находится в противо- фазе с первым буферным регистром 45. Таким образом, если один из указанных регистров выдает очередное расчетное время текущего интервала сохранения состояния активности линейки датчиков 38, то другой буферный регистр в это время подготавливает расчетное время для следующего такого интервала.
Коды расчетных времен с выхода блока 31 определения расчетного времени постулают на первый вход четвертого блока вы- . читания 36 элемента сравнения 33. На второй вход этого устройства поступают соответствующие коды фактических времен сохранения состояния активности линейки
0 датчиков 38 датчика 30 относительного положения с выхода измерителя фактического времени 32, которые формируются следующим образом. Второй генератор импульсов 47 непрерывно выдает единичные импульс5 ные сигналы на счетный вход накапливающего счетчика 50.
При поступлении единичного сигнала установки нуля накапливающий счетчик 50 переходит в нулевое состояние и с этого
0 времени начинается отсчет очередного фактического времени. Количество импульсов, поступивших в накапливающий счетчик 50 до следующего сигнала обнуления представляет собой искомое фактическое время.
5 Код формируемого фактического времени с выхода накапливающего счетчика 50 поступает на информационные входы третьего 48 и четвертого 49 буферных регистров и записывается в тот из указанных буферных реги0 стров, на входе записи которого, в течение текущего интервала сохранения состояния активности линейки датчиков 38 имеет место единичный сигнал. Поскольку единичный сигнал записи сохраняется вплоть до конца
5 рассматриваемого интервала времени, то к моменту перевода этого буферного регистра из режима записи в режим чтения его состояние будет отображать искомое фактическое время и. которое в следующем интер0 вале сохранения состояния активности
линейки датчиков 38, выдается на выходную
шину измерителя фактического времени 32.
По управляющим сигналам записи и
чтения третий 48 и четвертый 49 буферные
5 регистры работают в противофазе, поэтому, если в течение какого-либо интервала времени, один из указанных буферных регистров выдает на выход измерителя фактического времени 32 фактическое вре0 мя по предыдущему интервалу сохранения активности состояния линейки датчиков 38, то в другом буферном регистре, в это время, формируется фактическое время для текущего интервала времени, которое будет вы5 даваться на выходе измерителя фактического времени 32 в течение следующего интервала сохранения состояния активности линейки датчиков 38.
В четвертом блоке вычитания 36 блока сравнения 33 осуществляется формироваt-ие рассогласования между расчетными и фактическими временами и коды этих рассогласований поступают на информа- t ионный вход цифроаналогового преобразователя 37. Эти коды записываются в ЦАП 37 по передним фронтам единичных им- г ульсов с выхода схемы временной эадерж- ки 40 датчика 30 относительного г сложения, где хранятся в течении соответствующих интервалов времени.
Одновременно в ЦАП 37 поступающие ходы преобразуются в аналоговые сигналы, которые с выхода этого блока поступают через усилитель-мультиплексор 34 по его гервому информационному входу на тяго- «ые приводы 35 БТС. Поскольку сервопри- ЕОД движения 2 БТС стремится свести к yлю рассогласование расчетного и фактического времен, то постепенно обеспечива- ется синхронизация движений транспортных средств. В результате такой синхронизации, на выходе второго элемента ИЛИ 43 датчика относительного положе- ия формируется единичный сигнал г ризнака совмещения, который поступает ьа первый вход второго элемента И 25. На в горой вход этого элемента поступает сиг- ьал со второго компаратора 11. Если этот сигнал равен единице, следовательно, существует резерв времени для грузообмена v на втором элементе И 25 тоже формируется единичный сигнал, который через третий канал блока 16 поступает на второй индика- тэр 29, активируя при этом поле приглаше- н ия к грузообмену. При отсутствии внештатных ситуаций на борту ТТС оператор с выхода признака готовности к грузо- сбмену второго пульта управления 27 по гятому каналу блока 16 на индикатор 7 по- t ает сигнал приглашения к грузообмену, ко- торый активирует соответствующее поле этого индикатора.
Оператор БТС по сигналу приглашения к грузообмену с индикатора 7 на выходе выдает команду грузообмена, которая в ви- ре единичного сигнала поступает на приводы грузообмена-14 БТС и по первому каналу Блока связи 16 на вход второго привода г эузообмена 28. В результате осуществля- е гея одновременная работа приводов БТС и ТС (например, одновременное открытие дверей). Если со второго пульта управления 27 через блок 16 единичный сигнал пригла- к грузообмену не поступает на индикатор 7 и, следовательно, соответствующее г оля индикатора не загораются - это означает, что на ТТС возникла какая-то внештатная ситуация.
Грузообмен между транспортными средствами должен завершиться не позднее момента перехода БТС к торможению для остановки на очередной станции. Признаком необходимости завершения обмена является формирование единичного сигнала на выходе третьего узла сравнения 15, где осуществляется сравнение текущего времени с третьим временным резервом. При этом единичный сигнал с выхода третьего узла сравнения 15 поступает на вход
0 приглашения к завершению грузообмена первого индикатора 7. Такой же сигнал по четвертому каналу блока 16 поступает на одноименный вход второго индикатора 29. По полученному сигналу на втором индика5 торе 29, при отсутствии внештатных ситуаций оператор ТТС по выходу признака завершения готовности к грузообмену должен сформировать единичный сигнал, который по шестому каналу блока 16 поступает
0 на вход внешней готовности завершения грузообмена индикатора 7, активируя соответствующее поле этого индикатора. При наличии этого сигнала оператор БТС снимает команду грузообмена на одноименном
5 выходе. При этом приводы грузообмена на БТС и ТТС прекращают свою работу (например, закрывают двери транспортных средств). После этого, оператор БТС, выдачей сигнала на выходе режима, соответству
0 ющего единице, переводит БТС в реж1 ручного управления для остановки его н.: очередной станции.
При возникновении внештатной ситуации на ТТС в процессе приглашения к гру5 зообмену транспортных средств оператор БТС отказывается от стыковки транспортных средств и подачей единичного сигнала на выходе режима переводит БТС в режим ручного управления с последующим инди0 видуальным движением и снижением скорости движения БТС до расчетной крейсерской скорости и после расхождения транспортных средств формирует единичный сигнал на выходе команды Отказ, по
5 которой триггер 5 сбрасывается в нулевое состояние и тем самым устройство управления подготавливается к совместной работе со следующим ТТС. В этом случае, при дого- не БТС новым ТТС на выходе элемента И 6
0 возникает серия единичных сигналов по числу датчиков линейки 38; которые обнуляют содержимое счетчика 9 и первого 3 и второго 22 регистров. Далее, под действием генератора импульсов 8 счетчик 9 начинает
5 наращивать свое значение и если до конца текущего перегона первый временной резерв достаточен для стыковки, то операция стыковки осуществляется описанным выше способом. Если же временных резервов не достаточно для осуществления стыковки, то
попытка стыковки переносится на следующий перегон и БТС продолжает двигаться в режиме ручного управления вплоть до остановки на ближайшей станции маршрута. При этом в момент остановки в регистре 22 фиксируется остаточное время движения по перегону. В регистре 3 формируется суммарное время задержки БТС, а на выходе второго блока памяти 20 формируется эквивалентная задержка с учетом которой на выходе третьего блока памяти 21 формируется сигнал приглашения к догону.
Далее работа устройства осуществляется вышеописанным образом. В случае возникновения внештатной ситуации на борту ТТС в процессе грузообмена транспортных средств поле признака внешней готовности к завершению грузообмена индикатора 7 не активируется. Это говорит оператору БТС о невозможности расстыковки транспортных средств по причине внештатной ситуации на борту ТТС. В этом случае, а также в случае возникновения внештатной ситуации на борту БТС, оператор БТС выдает в виде единичного .сигнала команду аварийного дви- жения на одноименном выходе, которая поступает через блок 16 по второму каналу на вход аварийного движения второго индикатора 29, активируя соответствующее поле. По этому сигналу оператор ТТС берет инициативу управления системой 2-х транспортных средств на себя и обеспечивает аварийное управление (например торможение) таким образом, чтобы не потерять синхронизацию транспортных средств в процессе торможения.
Формула-изобретения Устройство управления движением транспортного средства, содержащее сервопривод, причем вход значения скорости и вход режима движения устройства подключены соответственно к первому и второму входам сервопривода, отличающееся тем, что, с целью повышения быстродействия, оно содержит блок определения скоро- сти, блок коммутации, с первого по третий блоки постоянной памяти, с первого по третий вычитатели, первый и второй счетчики, первый и второй регистры, триггер, с первого по четвертый узлы сравнения, генератор тактовых импульсов, первый, второй и третий элементы И, первый и второй приводы грузообмена, первый и второй индикаторы, причем выход генератора тактовых импульсов подключен к счетному входу счетчика, информационный выход которого подключен к первому информационному входу первого вычитателя и к информационным входам первого и второго регистров, выход первого регистра подключен к первому адресному входу первого блока постоянной памяти и к второму информационному входу первого вычитателя, выход второго регистра подключен к второму адресному входу первого блока постоянной памяти, выход которого подключен к первому информационному входу второго вычитателя, информационный выход которого подключен к первому адресному входу второго блока постоянной памяти, выход которого подключен к входу установки в Г триггера и к первому входу первого индикатора, вход команды Движение устройства подключен к входам записи-считывания первого и второго регистров и к счетному входу второго счетчика, информационный выход которого подключен к адресному входу третьего блока постоянной памяти, выход которого подключен к первому информационному входу первого узла сравнения и к первому информационному входу третьего вычитателя, информационный выход которого подключен к второму информационному входу второго вычитателя и к первому информационному входу второго узла сравнения, выход которого подключен к первому входу первого элемента И, выход которого подключен к второму входу первого индикатора, вход параметра грузообмена устройства подключен к входу первого привода грузообмена и к первому информационному входу блока коммутации, выходы с первого по шестой которого подключены соответственно к входу второго привода грузообменом, к первому, второму и третьему входам второго индикатора, к третьему и четвертому входам первого индикатора, входы Отказ движения, и Авария движения устройства подключены соответственно к входу установки в О триггера и к первому управляющему входу блока коммутации, второй и третий информационные входы которого подключены соответственно к входу признака Готовность к грузообмену и к входу признака Приглашение к грузообмену устройства, первый выход сервопривода подключен к первому входу второго элемента И, выход которого подключен к второму управляющему входу блока коммутации, второй выход сервопривода подключен к информационному входу блока определения скорости и к первому входу третьегЪ элемента И, выход которого подключен к входам установки в О первого счетчика, первого и второго регистров, выход блока определения скорости подключен к третьему входу сервопривода и к первому информационному входу третьего узла сравнения, второй информационный вход и выход которого подключены соответственно к входу значения Допустимая скорость устройства и к второму входу первого элемента И, выход триггера под- 1ючен к второму входу третьего элемента , информационный выход первого вычита ля подключен к второму адресному входу орого блока постоянной памяти, к вторым
формационным входам первого и второго у|лов сравнения и к первому информационному входу четвертого узла сравнения, выход которого подключен к пятому входу первого индикатора и к третьему управляющему входу блока коммутации, выход первого узла сравнения подключен к второму входу второго элемента И, выход третьего блока постоянной памяти подключен к второму информационному входу четвертого узла сравнения.




| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| ДВУНАПРАВЛЕННОЕ УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ ВРЕМЕНИ ВОССТАНОВЛЕНИЯ ЧАСТОТЫ | 2023 |
|
RU2817045C1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1988 |
|
SU1539825A1 |
| УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ ВРЕМЕНИ ВОССТАНОВЛЕНИЯ ЧАСТОТЫ ДВУНАПРАВЛЕННОЕ | 2024 |
|
RU2820839C1 |
| Цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией | 2022 |
|
RU2790205C1 |
| Цифровой демодулятор сигналов с двухуровневой амплитудно-фазовой манипуляцией и относительной оценкой амплитуды символа | 2022 |
|
RU2790140C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2022 |
|
RU2786159C1 |
| УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ ВРЕМЕНИ ВОССТАНОВЛЕНИЯ ЧАСТОТЫ | 2020 |
|
RU2787747C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |



ДОГОН
синхронизация
Фиг Л
ETC со стыковкой
1-4--ч
i БТС1бвз стыковки4
Фиг.2
обменнезависимое
движение
ТТС
Ј
Фиг. 3
Транзитное транслоргпное
ii
38
Фиг. б
Фиг. 7
Фиг. 8
