Изобретение относится к области радиотехники и может быть использовано в цифровых устройствах приема информационных сигналов с многопозиционной амплитудной - относительной фазовой манипуляцией (АОФМ или ADPSK).
Известен демодулятор сигналов с амплитудно-фазовой модуляцией (Скляр B.C., Бураковский А.З., Заваршина Э.А. Демодулятор сигналов с амплитудно-фазовой модуляцией // Авторское свидетельство SU 1023666 А, МПК H04L 27/22, от 15.06.87, Бюл. №22), содержащий блок корреляционного приема сигнала, блоки вычисления его фазы и амплитуды, вычислитель разности фаз, пороговые устройства и аттенюаторы и реализующий обработку сигнала с АОФМ.
Его недостатком является аналоговая обработка сигнала и сопутствующие ей погрешности квадратурных преобразований.
Известно устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией (Астапкович К.Ф., Буянов В.Ф., Захаров И.И., Калмыков Б.П., Лопатин С.И., Нейман А.А., Перфильев Э.П., Сивов О.Т. Устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией // Авторское свидетельство SU 1309319 А1, МПК Н04В 1/10, от 07.05.87, Бюл. №17), содержащее автоматический регулятор уровня, фазовращатель, аналого-цифровой преобразователь (АЦП), демодулятор, решающий блок, адаптивный корректор, декодер и блок фазовой автоподстройки частоты.
Его недостатками являются значительные вычислительные затраты и сложность реализации, особенно корректора и демодулятора, а также аналоговое формирование квадратурных каналов, погрешности которого существенно влияют на помехоустойчивость многопозиционных значений фазы.
Известны способ и устройство демодуляции сигнала (Лабутин В.В., Чулков Д.О., Петров И.А., Ронжин A.M. Способ и устройство демодуляции сигнала // Патент №2713206 С1, МПК H04L 27/34, опубл. 04.02.2020), содержащее последовательно соединенные блок аналоговой обработки, блок АЦП и программируемую логическую интегральную схему (ПЛИС), где ПЛИС выполнена с возможностью обмена данными с буферной памятью и микроконтроллером, а микроконтроллер и ПЛИС связаны с интерфейсами, обеспечивающими взаимодействие с компьютером и внешними устройствами. При этом устройство выполнено с возможностью последовательности обработки сигнала, включающей преобразование аналогового сигнала в цифровой вид на промежуточной частоте, выделение огибающей и разложение на квадратуры, символьную синхронизацию, адаптивную фильтрацию, синхронизацию по несущей, демаппинг с использованием данных в буферной памяти, кадровую синхронизацию и декодирование.
Его недостатком является сложность реализации.
Наиболее близким по технической сущности и внутренней структуре к предлагаемому устройству является цифровой фазовый детектор (Чернояров О.В., Глушков А.Н., Литвиненко В.П., Литвиненко Ю.В., Матвеев Б.В., Демина Т.И. Цифровой фазовый детектор // Патент №2723445 С2, МПК H04L 27/22, опубл. 11.06.2020), содержащий АЦП, регистр сдвига многоразрядных кодов на четыре отсчета, первый и второй n-каскадные каналы квадратурной обработки сигналов, генератор тактовых импульсов, нормирующее устройство, цифровой формирователь арктангенса и блок коррекции фазы.
Его недостатком является отсутствие возможности демодуляции сигналов с многопозиционной амплитудной - относительной фазовой манипуляцией.
Задачей предлагаемого технического решения является высокоскоростная цифровая демодуляция сигналов с многопозиционной амплитудной - относительной фазовой манипуляцией с минимальными аппаратными затратами.
Технический результат цифрового демодулятора заключается в обеспечении высокоскоростной цифровой когерентной демодуляции сигнала с многопозиционной АОФМ, не требующей фазовой синхронизации устройства, что упрощает построение цифрового демодулятора сигналов с многопозиционной АОФМ, например, на программируемых логических интегральных схемах.
Поставленная задача решается тем, что цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией, содержащий каскадно соединенные АЦП и регистр сдвига многоразрядных кодов на четыре отсчета (РС4), первый и второй n-каскадные каналы квадратурной обработки сигналов (ККО), причем нечетные выходы регистра сдвига соединены с входами первого ККО, а четные выходы - с входами второго ККО, нормирующее устройство (НУ), первый и второй входы которого соединены с выходами первого и второго ККО соответственно, цифровой формирователь арктангенса (ЦФ), вход которого подключен к выходу НУ, блок коррекции фазы (КФ), вход которого соединен с выходом ЦФ, и генератор тактовых импульсов (ГТИ), причем тактовые входы АЦП, первого и второго ККО, регистра сдвига многоразрядных кодов на четыре отсчета подключены к выходам ГТИ, дополнительно содержит блок задержки (БЗ), вход которого подключен к выходу КФ, третий вычитатель (В3), первый вход которого соединен с выходом КФ, а второй вход - с выходом Б3, первый блок формирования решения (БФР1), вход которого соединен с выходом В3, формирователь кода (ФК), первый вход которого подключен к выходу БФР1, квадратичный преобразователь (КП), первый вход которого соединен с выходом первого ККО, второй вход - с выходом второго ККО, блок тактовой синхронизации (БТС), формирователь порогов (ФП), второй блок формирования решения (БФР2), выход КП подключен к общей точке, образованной соединением входа БТС, первого входа ФП и первого входа БФР2, выход БТС подключен к общей точке, образованной соединением второго входа ФП, второго входа БФР2 и второго входа ФК, третий вход БФР2 подключен к выходу ФП, выход БФР2 соединен с третьим входом ФК, тактовые входы БТС, БЗ и ФК подключены к выходам ГТИ, выход ФК является выходом устройства.
Предлагаемое техническое решение поясняется чертежами.
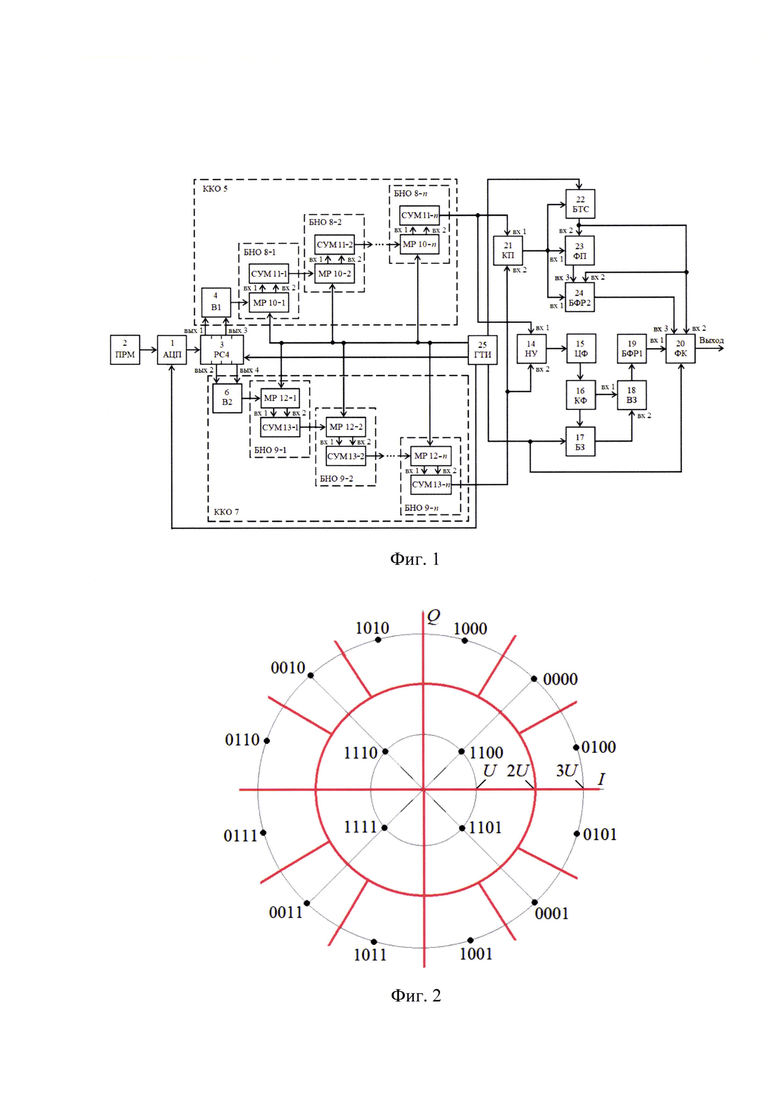
На фиг.1 представлена структурная схема предлагаемого устройства, на фиг.2 и фиг.3 - созвездия сигнала с 16АОФМ, на фиг.4 показан процесс квантования входного сигнала (по 4 отсчета на период), на фиг.5 - временные диаграммы откликов квадратурных каналов, на фиг.6 - реализация отсчетов сдвига фаз, на фиг.7 реализация оценки амплитуды символов, на фиг.8 - реализация фрагмента сигнала для реализации тактовой синхронизации демодулятора, а на фиг.9 - зависимость вероятности ошибки от минимального выходного отношения сигнал/шум.
Устройство содержит АЦП 1, ко входу которого подключено приемное устройство (ПРМ) 2. Выход АЦП 1 соединен с входом регистра 3 сдвига многоразрядных кодов на четыре отсчета РС4, нечетные выходы которого соединены с соответствующими входами вычитателя В1 4 первого ККО 5, а четные выходы - с соответствующими входами вычитателя В2 6 второго ККО 7. Каждый ККО помимо вычитателя содержит n каскадно соединенных блоков накопления отсчетов (БНО). Количество БНО n зависит от числа N периодов накопления сигнала и определяется двоичным логарифмом N (n=log2 N). Такое построение устройства обеспечивает минимальное количество БНО. При этом число обрабатываемых периодов сигнала равно N=2n, а длительность накопления равна NT0, где T0=1/ƒ0 - период принимаемого сигнала с несущей частотой ƒ0.
Первый ККО 5 содержит последовательно соединенные БНО 8-1, … , 8-n, а второй ККО 7 - последовательно соединенные БНО 9-1, …, 9-n. Каждый БНО состоит из регистра сдвига многоразрядных кодов MP и сумматора СУМ. Блоки 8-1, …, 8-n накопления отсчетов содержат регистры 10-1, …, 10-n сдвига многоразрядных кодов и сумматоры 11-1, …, 11-n соответственно, а БНО 9-1, …, 9-n содержат регистры 12-1, …, 12-n сдвига многоразрядных кодов и сумматоры 13-1, …, 13-n. В каждом блоке 8 (9) накопления отсчетов вход регистра 10 (12) сдвига является входом блока 8 (9) накопления отсчетов, а его выход соединен с первым входом сумматора 11 (13). Второй вход сумматора 11 (13) соединен с другим выходом регистра 10 (12) сдвига. Выход сумматора 11 (13) является выходом блока 8 (9) накопления отсчетов, а тактовый вход регистра 10 (12) сдвига является управляющим входом блока 8 (9) накопления отсчетов.
Выход вычитателя В1 4 соединен с входом блока 8-1 накопления отсчетов ККО 5, а выход блока 8-п накопления отсчетов ККО 5 - с первым входом НУ 14. Выход вычитателя В2 6 соединен с входом блока 9-1 накопления отсчетов ККО 7, а выход блока 9-n накопления отсчетов ККО 7 - со вторым входом НУ 14. Выход НУ 14 соединен с входом ЦФ 15, а его выход подключен к входу КФ 16, выход которого подключен к входу блока задержки БЗ 17 и первому входу вычитателя В3 18. Второй вход вычитателя В3 18 соединен с выходом БЗ 17, а его выход соединен с первым блоком формирования решения БФР1 19, чей выход подключен к первому входу формирователя кода ФК 20. Выходы первого и второго ККО 5 и 7 подключены к первому и второму входам квадратичного преобразователя КП 21, выход которого соединен с входом БТС 22, первым входом ФП 23 и первым входом БФР2 24. Выход БТС 22 соединен с вторым входом ФП 23, вторым входом БФР2 24 и вторым входом ФК 20. Выход ФП 23 подключен к третьему входу БФР2 24, а выход БФР 24 - к третьему входу ФК 20. Тактовые входы АЦП 1, регистра 3 сдвига многоразрядных кодов на четыре отсчета РС4, первого 5 и второго 7 ККО, БТС 22, БЗ 17 и ФК 20 подключены к выходам ГТИ 25, выход ФК 20 является выходом демодулятора. Устройство работает следующим образом.
Сигнал с амплитудной - относительной фазовой манипуляцией является многопозиционным и одновременно модулируется по амплитуде и фазе передаваемым двоичным кодом.
Сигнал с амплитудно-фазовой манипуляцией (АФМ или APSK) представляется созвездием - диаграммой на плоскости, точки которой отображают значения амплитуды и начальной фазы передаваемого 2m - позиционного информационного символа, представляемого m-разрядным двоичным кодом. Пример созвездия сигнала 16АФМ, применяемого в цифровом телевидении, при m=4 (число позиций равно 16) показан на фиг.2. Точка в квадратурной плоскости (I, Q) соответствует позиции сигнала, угол наклона вектора из начала координат соответствует начальной фазе ψk k-го передаваемого информационного символа, а длина вектора - его амплитуде Sk, тем самым реализуется полярная система координат. Точки кодируются четырехразрядными комбинациями кода Грея. Как видно, передаются 12 значений начальной фазы и 2 значения амплитуды. Для демодуляции сигнала с АФМ на приемной стороне необходима фазовая синхронизация опорного генератора, что существенно усложняет аппаратуру и допускает явление обратной работы демодулятора.
В сигнале с АОФМ фазовая компонента информационного символа передается не начальной фазой, а разностью фаз принятого k-го и предшествующего (k-1)-го элементов. При этом угол ϕk в созвездии на фиг. 2 соответствует разности фаз  Для обеспечения однозначности значения ϕk приводятся к интервалу 0÷2π.
Для обеспечения однозначности значения ϕk приводятся к интервалу 0÷2π.
На выходе приемника 2 k-й принимаемый символ сигнала s(t) с АОФМ имеет вид

где  , U - минимальная амплитуда символа (фиг.2), ak=1,…,М1 - символы, модулирующие амплитуду (на фиг.2 М1=2), bk=1,…,(М2-1) - символы, модулирующие фазу (на фиг.2 М2=12), ƒ0 и ψ0 - несущая частота и начальная фаза принимаемого сигнала. Общее число позиций сигнала с АОФМ (1), описываемого созвездием, представленным на фиг.2, определится как М=4+12=16.
, U - минимальная амплитуда символа (фиг.2), ak=1,…,М1 - символы, модулирующие амплитуду (на фиг.2 М1=2), bk=1,…,(М2-1) - символы, модулирующие фазу (на фиг.2 М2=12), ƒ0 и ψ0 - несущая частота и начальная фаза принимаемого сигнала. Общее число позиций сигнала с АОФМ (1), описываемого созвездием, представленным на фиг.2, определится как М=4+12=16.
На фиг.3 показан другой вариант созвездия с M1=2, М2=8 и M=M1M2=16. Его особенностью является возможность независимой модуляции амплитуды (1 бит) и сдвига фаз (3 бита) сигнала.
Модулирующий фазу символ bk в (1) с номером k определяется текущим передаваемым информационным символом xk и предшествующим символом bk-1, принимающим значения из диапазона  по следующему правилу:
по следующему правилу:

Здесь b0=0, а информационный символ xk связан с модулирующими символами bk и bk-1 выражением

Преобразование (2) выполняется в модуляторе передатчика за пределами фиг.1, а (3) - в демодуляторе приемника. При многопозиционной фазовой манипуляции часто используется кодирование передаваемых данных кодом Грея. Тогда после демодуляции проводится декодирование полученного кода.
Текущая начальная фаза  принимаемого сигнала равна
принимаемого сигнала равна

а разность фаз  не зависит от ψ0, вследствие чего для оценки ϕk не требуется фазовая синхронизация демодулятора.
не зависит от ψ0, вследствие чего для оценки ϕk не требуется фазовая синхронизация демодулятора.
Модулирующий амплитуду символ ak может принимать нечетные значения (для сигналов, представленных на фиг.2 и фиг.3, значения 1 или 3, соответственно).
Сигнал с АОФМ поступает на вход АЦП 1, который формирует по четыре отсчета входного сигнала на период повторения  в соответствии с тактовыми импульсами ГТИ 25, поступающими с частотой 4ƒ0. Процесс квантования для i-го периода показан на фиг.4.
в соответствии с тактовыми импульсами ГТИ 25, поступающими с частотой 4ƒ0. Процесс квантования для i-го периода показан на фиг.4.
После обработки j-го периода (заполнения многоразрядного регистра сдвига на 4 отсчета) на вход вычитателя 4 поступают отсчеты  и
и  а на его выходе формируется разность
а на его выходе формируется разность  (здесь и далее индексы у амплитуды S и текущей начальной фазы ψ принимаемого символа опущены), которая запоминается в многоразрядном регистре сдвига 10-1. В следующем периоде сигнала на выходе вычитателя 4 получим величину
(здесь и далее индексы у амплитуды S и текущей начальной фазы ψ принимаемого символа опущены), которая запоминается в многоразрядном регистре сдвига 10-1. В следующем периоде сигнала на выходе вычитателя 4 получим величину  а на выходе сумматора 11-1 -
а на выходе сумматора 11-1 -  После поступления
После поступления  периодов входного сигнала (n - число БНО в каждом ККО) при отсутствии помех на выходе сумматора 11-n ККО 5 получим результат
периодов входного сигнала (n - число БНО в каждом ККО) при отсутствии помех на выходе сумматора 11-n ККО 5 получим результат

обработки 2N отсчетов принятого сигнала (полагается, что за время NT0 начальная фаза входного сигнала меняется незначительно).
Аналогично на вход вычитателя 6 сначала поступают отсчеты  и
и  на выходе формируется разность
на выходе формируется разность  которая запоминается в регистре 12-1. В результате после поступления N периодов входного сигнала на выходе сумматора 13-n ККО 7 получим результат
которая запоминается в регистре 12-1. В результате после поступления N периодов входного сигнала на выходе сумматора 13-n ККО 7 получим результат

Для удобства дальнейшего анализа изменим нумерацию поступивших периодов следующим образом: i=j+N-1. Тогда для откликов ККО  и
и  можно записать
можно записать

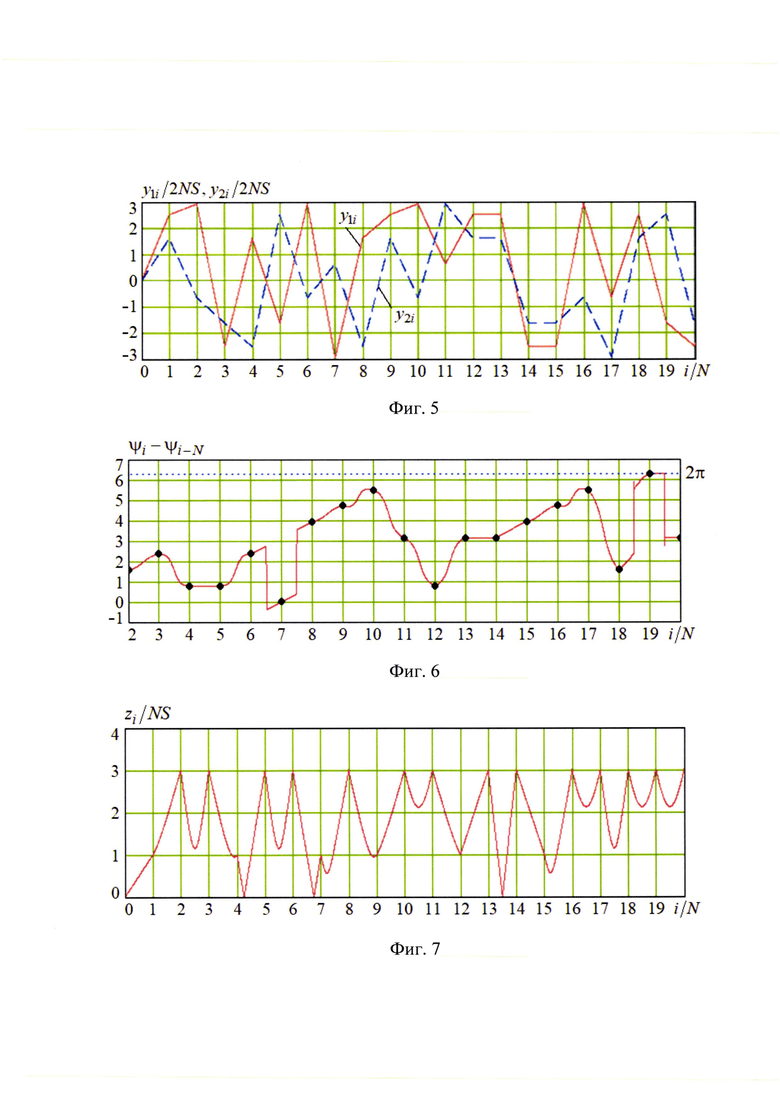
где i - номер текущего (последнего поступившего) обрабатываемого периода сигнала по окончании приема текущего символа. Примеры нормированных к NS зависимостей y1i и y2i при произвольном номере периода i и отсутствии помех для созвездия, изображенного на фиг.3, показаны на фиг.5. Линейный характер изменения этих величин свидетельствует об оптимальности обработки сигнала.
Двоичные коды величин y1i и y2i поступают в нормирующее устройство 14 (на основе регистров сдвига), обеспечивающее путем совместного сдвига кодов полное заполнение разрядной сетки наибольшего по модулю из них. Далее результаты поступают в цифровой формирователь арктангенса 15, в котором определяется величина

равная сдвигу фаз между принимаемым и опорным (от ГТИ 25) сигналами.
Вычисления в (5) целесообразно реализовать аппаратно на базе постоянного запоминающего устройства (ПЗУ), где коды величин y1i и y2i образуют адрес ячейки памяти, в которой записан двоичный код ψi (5). Если разрядность нормированных (на произведение NS) кодов y1i и y2i выбрать равной 10 (20-ти разрядная шина адреса ПЗУ), и разрядность кода ψi (шины данных) равной 16, то потребуется ПЗУ общей емкостью 2 Мбайт.
Фаза сигнала многозначна с интервалом 2π, так что при большом диапазоне изменения фазы принимаемого сигнала решения на основе (5) могут приводить к скачкам результата. В этой связи значения  поступают в блок коррекции фазы 16, где выделяются разности их
поступают в блок коррекции фазы 16, где выделяются разности их  на соседних периодах, и, если
на соседних периодах, и, если  то к значению
то к значению  добавляется код числа 2π, а если
добавляется код числа 2π, а если  то - вычитается.
то - вычитается.
Скорректированный код  с выхода КФ 16 поступает на вход блока задержки БЗ 17 на N периодов сигнала и на первый вход вычитателя ВЗ 18, на второй вход которого подается код с выхода БЗ 17. В результате на выходе В3 формируется код разности фаз
с выхода КФ 16 поступает на вход блока задержки БЗ 17 на N периодов сигнала и на первый вход вычитателя ВЗ 18, на второй вход которого подается код с выхода БЗ 17. В результате на выходе В3 формируется код разности фаз  по окончании приема символа (в момент тактовой синхронизации демодулятора) равный сдвигу фаз между принятым и предшествующим символами сигнала с ОФМ. Пример зависимости
по окончании приема символа (в момент тактовой синхронизации демодулятора) равный сдвигу фаз между принятым и предшествующим символами сигнала с ОФМ. Пример зависимости  от значения i/N для созвездия, изображенного на фиг. 3, и М2=8 в случае отсутствия помех показан на фиг.6. Точками здесь отмечены значения сдвига фаз в момент окончания приема текущего элемента.
от значения i/N для созвездия, изображенного на фиг. 3, и М2=8 в случае отсутствия помех показан на фиг.6. Точками здесь отмечены значения сдвига фаз в момент окончания приема текущего элемента.
С выхода ВЗ 18 код разности фаз поступает на вход первого блока формирователя результата БФР1 19, и на его выходе в момент окончания приема текущего элемента сигнала образуется m2-разрядный двоичный код принятого значения сдвига фаз текущего и предшествующего элементов

Если величину  округлить до целого значения, то получим принятый символ bk. По сигналу тактовой синхронизации от БТС 22 код ci поступает в ФК 20.
округлить до целого значения, то получим принятый символ bk. По сигналу тактовой синхронизации от БТС 22 код ci поступает в ФК 20.
Отклики первого 5 и второго 7 ККО y1i и y2i поступают в КП 21, на выходе которого формируется величина

С учетом (4) в момент окончания приема k-го символа с амплитудой Sk
и с точностью до множителя является оценкой амплитуды элемента сигнала с АОФМ. Пример зависимости zi (6) от значения i/N для созвездия, представленного на фиг.3, в условиях отсутствия помех показан на фиг.7.
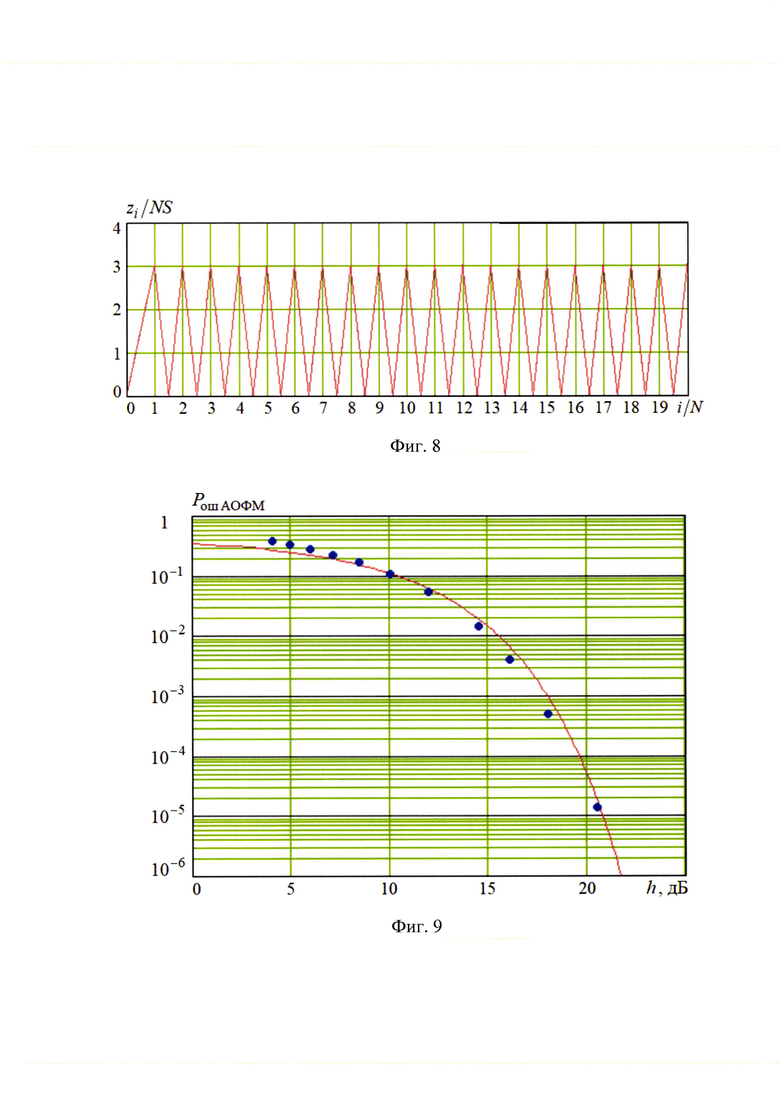
Отклик КП 21 zi (6) поступает в БТС 22, в котором формируются синхроимпульсы, отмечающие момент окончания приема очередного элемента сигнала. Для обеспечения надежной тактовой (символьной) синхронизации перед блоком данных передается синхронизирующая последовательность, например, с чередованием фазы 0 и π. Тогда отклик zi будет меняться периодически, как показано на фиг.8.
Отклики КП 21 по сигналу БТС 22 поступают в формирователь порогов ФП 23, формирующий пороговые уровни, значения которых передаются в БФР2 24 (для созвездий, представленных на фиг.2 и фиг.3, требуется один порог, равный 2U).
Отклики КП 21 zi подаются в БФР2 24, где сравниваются с порогами от ФП 23, и на выходе БФР2 формируется решение об амплитуде принятого элемента сигнала. Для созвездий, изображенных на фиг.2 и фиг.3, это решение может быть двоичным (0 - амплитуда меньше 2 U или 1 - амплитуда больше 2U) или двоичным кодом di, определяющим амплитуду принятого элемента сигнала.
Коды ci и di поступают в формирователь кода ФК 20, на выход которого выдается код принятого информационного символа (для сигналов 16 АОФМ четырехразрядный двоичный код). Пара значений ci, di отображает точку на диаграмме  созвездия (в полярных координатах), по положению которой и формируется выходной код. Для созвездия, изображенного на фиг.3, обеспечивается раздельная модуляция и демодуляция амплитуды и сдвига фаз. Для других вариантов созвездий, в том числе и квадратных, решения об амплитуде и сдвиге фаз принимаются совместно по паре значений ci, di. Блок ФК 20 может быть реализован на базе ПЗУ, на шину адреса которого подаются коды ci, di, а в соответствующей ячейке записан код информационного символа.
созвездия (в полярных координатах), по положению которой и формируется выходной код. Для созвездия, изображенного на фиг.3, обеспечивается раздельная модуляция и демодуляция амплитуды и сдвига фаз. Для других вариантов созвездий, в том числе и квадратных, решения об амплитуде и сдвиге фаз принимаются совместно по паре значений ci, di. Блок ФК 20 может быть реализован на базе ПЗУ, на шину адреса которого подаются коды ci, di, а в соответствующей ячейке записан код информационного символа.
В предлагаемом устройстве обеспечивается минимум арифметических операций на период сигнала и, следовательно, высокая скорость его цифровой обработки.
Технически устройство наиболее целесообразно реализовать на базе программируемых логических интегральных схем (ПЛИС).
В случае искажения полезного сигнала (1) гауссовским шумом с независимыми отсчетами и дисперсией  шумовые компоненты откликов y1i и y2i являются приближенно статистически независимыми и описываются нормальным распределением вероятностей с нулевым средним значением и дисперсией
шумовые компоненты откликов y1i и y2i являются приближенно статистически независимыми и описываются нормальным распределением вероятностей с нулевым средним значением и дисперсией
равной сумме дисперсий отсчетов.
Минимальное отношение сигнал/шум на выходе квадратурных каналов обработки сигнала (отношение мощности сигнальной компоненты последовательности отсчетов к мощности шумовой составляющей) определится как

Помехоустойчивость сигнала с АОФМ зависит от вида созвездия. Для расположения сигнальных точек, показанного на фиг.3, число позиций амплитуды соответствует М1=2 (два значения U и 3 U), а число позиций фазы равно М2=8 и одинаково для каждой из амплитуд элементов сигнала.
Для элементов с амплитудой 3U отношение сигнал/шум больше минимального значения (7) на 9,5 дБ, то есть вероятности ошибочного приема для элементов с амплитудой 3 U пренебрежимо малы по сравнению с элементами с амплитудой U.
В (Скляр Б. Цифровая связь. Теоретические основы и практическое применение. - М.: Вильяме, 2016. - 1104 с.) приведено выражение для вероятности ошибки оптимальной когерентной демодуляции сигнала с МОФМ (MDPSK) с числом позиций М2 в виде

где  Тогда для равновероятных амплитуд символов для вероятности ошибки демодуляции сигнала с АОФМ с созвездием, изображенным на фиг.3, имеем
Тогда для равновероятных амплитуд символов для вероятности ошибки демодуляции сигнала с АОФМ с созвездием, изображенным на фиг.3, имеем

На фиг.9 сплошной линией показана зависимость (8) от минимального отношения сигнал/шум h (7), выраженного в децибелах. Здесь же точками нанесены значения вероятности -РошАОФМ, полученные с помощью статистического имитационного моделирования работы цифрового демодулятора сигнала с АОФМ при N=256. Отсюда следует, что теоретическая кривая (8) удовлетворительно описывает соответствующие экспериментальные данные в широком диапазоне выходных отношений сигнал/шум, а предложенный демодулятор обладает потенциальной помехоустойчивостью в гауссовских шумах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2022 |
|
RU2786159C1 |
| Цифровой демодулятор сигналов с двухуровневой амплитудно-фазовой манипуляцией и относительной оценкой амплитуды символа | 2022 |
|
RU2790140C1 |
| Цифровой некогерентный демодулятор сигналов с амплитудно-четырехпозиционной фазовой манипуляцией | 2021 |
|
RU2761521C1 |
| Цифровой некогерентный демодулятор сигналов с амплитудно-фазовой манипуляцией | 2021 |
|
RU2766429C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2021 |
|
RU2776968C1 |
| Цифровой измеритель отношения сигнал/шум сигналов с фазовой манипуляцией | 2023 |
|
RU2799234C1 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР ЧЕТЫРЕХПОЗИЦИОННОГО СИГНАЛА С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2017 |
|
RU2656577C1 |
| Цифровой измеритель отношения сигнал/шум сигналов с фазовой манипуляцией | 2024 |
|
RU2827313C1 |
| Цифровой демодулятор сигналов с квадратурной амплитудной манипуляцией | 2015 |
|
RU2628427C2 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР ДВОИЧНЫХ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ВТОРОГО ПОРЯДКА | 2018 |
|
RU2690959C1 |
Изобретение относится к области радиотехники и может быть использовано в цифровых устройствах приема информационных сигналов с многопозиционной амплитудной - относительной фазовой манипуляцией (АОФМ или ADPSK). Техническим результатом изобретения является обеспечение высокоскоростной цифровой когерентной демодуляции сигнала с многопозиционной АОФМ, не требующей фазовой синхронизации устройства, что упрощает построение цифрового демодулятора сигналов с многопозиционной АОФМ, например, на программируемых логических интегральных схемах. Цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией дополнительно содержит блок задержки, третий вычитатель, первый и второй блоки формирования решения, формирователь кода, квадратичный преобразователь, блок тактовой синхронизации, формирователь порогов. 9 ил.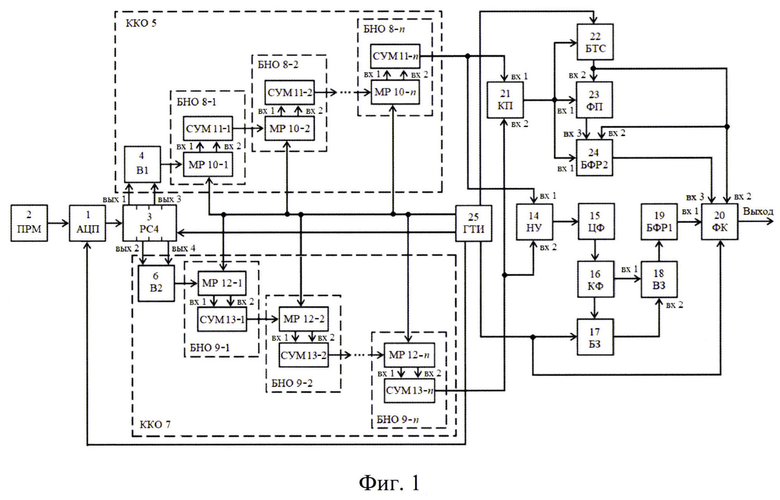
Цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией, содержащий каскадно соединенные аналого-цифровой преобразователь (АЦП) и регистр сдвига многоразрядных кодов на четыре отсчета (РС4), первый и второй n-каскадные каналы квадратурной обработки сигналов (ККО), причем нечетные выходы регистра сдвига соединены с входами первого ККО, а четные выходы - с входами второго ККО, нормирующее устройство (НУ), первый и второй входы которого соединены с выходами первого и второго ККО соответственно, цифровой формирователь арктангенса (ЦФ), вход которого подключен к выходу НУ, блок коррекции фазы (КФ), вход которого соединен с выходом ЦФ, и генератор тактовых импульсов (ГТИ), причем тактовые входы АЦП, первого и второго ККО, регистра сдвига многоразрядных кодов на четыре отсчета подключены к выходам ГТИ, отличающийся тем, что дополнительно содержит блок задержки (БЗ), вход которого подключен к выходу КФ, третий вычитатель (В3), первый вход которого соединен с выходом КФ, а второй вход - с выходом БЗ, первый блок формирования решения (БФР1), вход которого соединен с выходом В3, формирователь кода (ФК), первый вход которого подключен к выходу БФР1, квадратичный преобразователь (КП), первый вход которого соединен с выходом первого ККО, второй вход - с выходом второго ККО, блок тактовой синхронизации (БТС), формирователь порогов (ФП), второй блок формирования решения (БФР2), выход КП подключен к общей точке, образованной соединением входа БТС, первого входа ФП и первого входа БФР2, выход БТС подключен к общей точке, образованной соединением второго входа ФП, второго входа БФР2 и второго входа ФК, третий вход БФР2 подключен к выходу ФП, выход БФР2 соединен с третьим входом ФК, тактовые входы БТС, БЗ и ФК подключены к выходам ГТИ, выход ФК является выходом устройства.
| Цифровой фазовый детектор | 2018 |
|
RU2723445C2 |
| Цифровой некогерентный демодулятор сигналов с амплитудно-четырехпозиционной фазовой манипуляцией | 2021 |
|
RU2761521C1 |
| Цифровой обнаружитель фазоманипулированных сигналов | 2015 |
|
RU2634382C2 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ С ДВОИЧНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2016 |
|
RU2633183C1 |
| ГЛУШКОВ А.Н., КОЛБОВ Б.Н., ЛИТВИНЕНКО В.П | |||
| Цифровой демодулятор сигналов с относительной фазовой манипуляцией // Вестник ВГТУ | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| С | |||
| Экономайзер | 0 |
|
SU94A1 |
| US 3991377 A, 09.11.1976 | |||
| US 4896336 A, 23.01.1990 | |||
| KR 20080052085 A, 11.06.2008. | |||

