Изобретение относится к области вычислительной техники, в частности к уст- р зйствам контроля, и может быть й(;пользован,о в научных исследованиях и т« шике, где требуется находить оптимальнее время начала контроля работоспособности системы, среднее значение числа резервных элементов и ресурс каждой подсистемы, необходимые для нормального функционирования системы, имеющей ограниченный запас ресурса.
Целью изобретения является повышение быстродействия и информативности ус- тоойства и точности определения оптимального периода технического обслуживания системы за счет вычисления искомых величин за один цикл работы устройства, учета затрат времени и ресурса на восстановление работоспособности системы в случае обнаружения отказа и определения среднего значения числа резервных элементов каждой подсистемы, необходимых для нормального функционирования системы с ограниченным ресурсом.
Функционирование системы по назначению возможно только в случае, если работоспособными являются все ее подсистемы. Поэтому целесообразно проводить ТО всех подсистем одновременно. Период контроля и ТО в общем случае не будет соответствоС
со
XI
со со
00
вать оптимальному для отдельных подсистем, однако, желательно, чтобы он был оптимальным для сложной системы в целом.
Пусть в составе сложной системы имеется гп подсистем, ,т, каждая из которых обладает своим запасом ограничения ресурса жизнедеятельности RI. В частном случае система может обладать одним ресурсом. В режиме нормального функционирования и в состоянии отказа каждая -1-я подсистема в среднем расходует в единицу времени Ci единиц ресурса. Если в результате каждого сеанса контроля работоспособности системы 1-й подсистемой расходуется RRI единиц ресурса, а при вое- становлении системы - Вы единиц ресурса, то уравнение баланса по ресурсу R можно записать в следующем виде:
mm
Ј V {Cir+Rki+Rbi 1-Pi( г)}.
1
где Ryi - среднее значение ресурса, расходуемого 1-й подсистемой за один цикл эксплуатации, цикл эксплуатации - среднее значение времени между началами прове- дения сеанса контроля работоспособности системы;
г- период контроля и ТО системы;
N - число сеансов обслуживания системы за время эксплуатации на ограниченном ресурсе R;
Ri( г)-вероятностьбезотказной работы 1-й подсистемы на периоде г обслуживания.
Поскольку момент наступления отказа случаен, то среднее время Тф1 полезного функционирования i-й подсистемы на ресурсе RI определим по формуле
-
Тф r)N ГфгМ / Pi(t) dt,
-°
где гфг среднее время полезного функцио-
нирования i-й подсистемы на периоде т обслуживания.
Поскольку подсистемы, составляющие сложную систему,разнонадежны, то естественно считать, что время их полезного фун- кционирования будет разным на интервале времени жизни (активного функционирования) системы. Наряду с этим, время актив- ного функционирования ТС| каждой подсистемы будет одинаково и равно вре- мени Тс системы в целом. Исходя из этого, задача обоснования оптимального периода ТО сложной системы по критерию максимума среднего времени полезного функционирования системы формируется следующим образом: найти такой период г , при кото-
Тф (г ) min max Тф| (т), i т
При длительной эксплуатации сложных систем возможно прекращение полезного функционирования отдельных подсистем из-за нехватки потребляемого ими ресурса или из-за отказа. Поэтому необходимо знать, такой ресурс RI потребляет 1-я подсистема в течение заданного времени функци- онирования системы и какое число резервных элементов i-й подсистемы понадобится для безотказной работы сложной системы в целом.
Эти величины определяются по следующим формулам:
RrN r + Pki + Rbi 1 - Pi (i) } .
fii-N(1-Pi(rJ).
Предлагаемое устройство позволяет ап- паратурно реализовать рассмотренную модель.
Сущность изобретения поясняется чертежами.
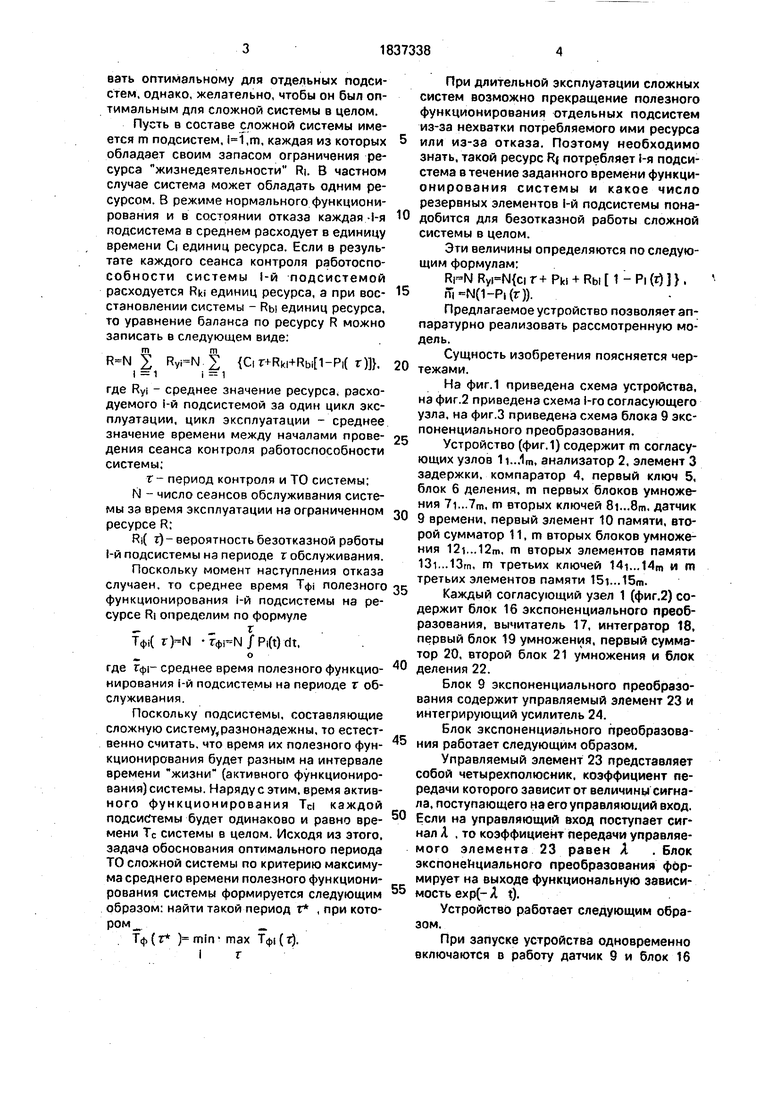
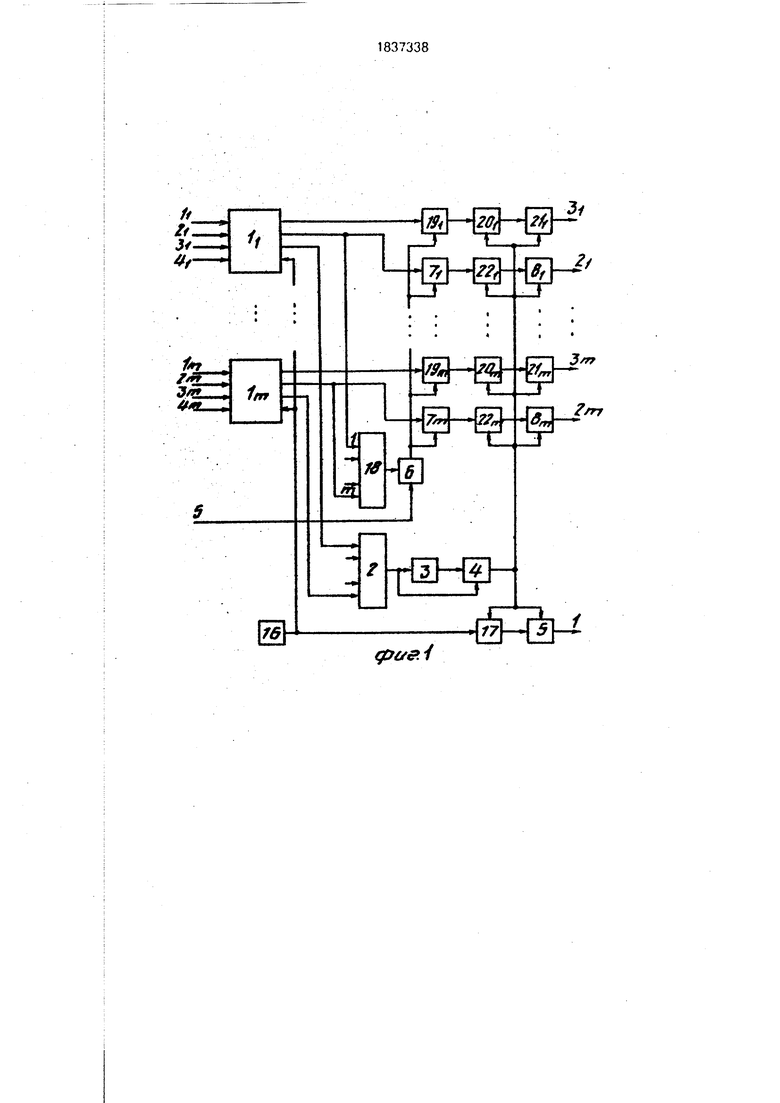
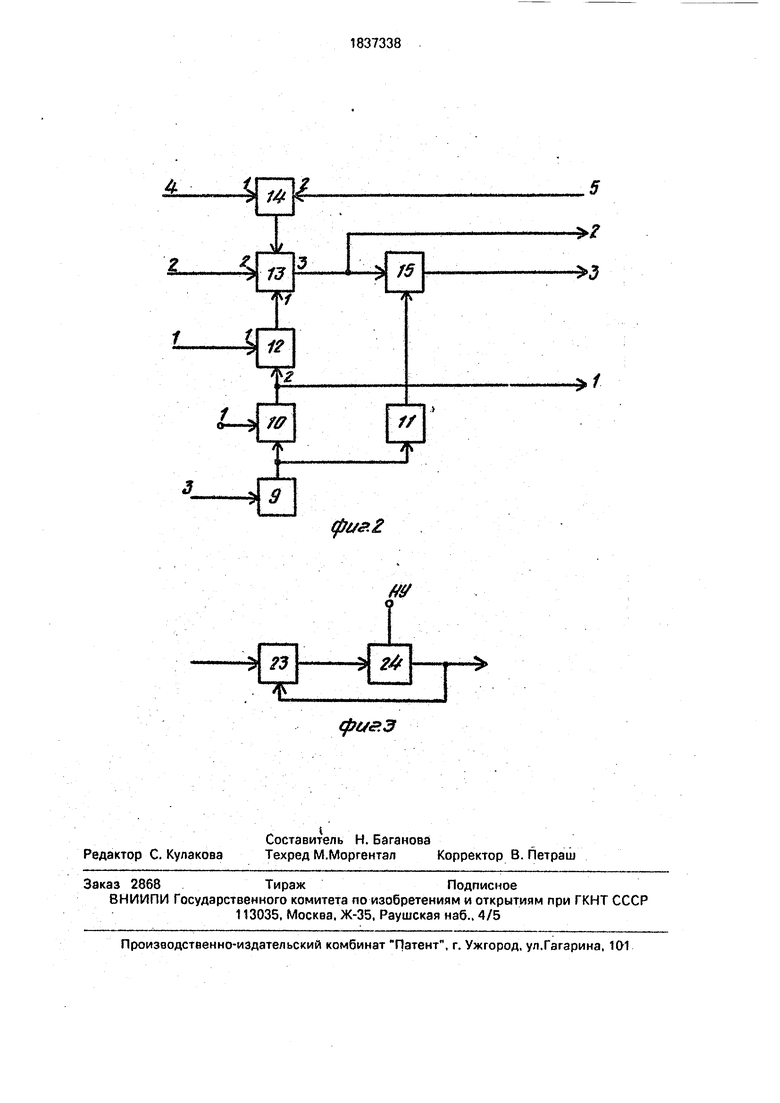
На фиг.1 приведена схема устройства, на фиг.2 приведена схема 1-го согласующего узла, на фиг.З приведена схема блока 9 экспоненциального преобразования.
Устройство (фиг.1) содержит m согласующих узлов 1 i..,1m, анализатор 2, элемент 3 задержки, компаратор 4, первый ключ 5, блок б деления, m первых блоков умножения 7i...7m, m вторых ключей 8i...8m. датчик 9 времени, первый элемент 10 памяти, второй сумматор 11, m вторых блоков умножения 12i...12m, гп вторых элементов памяти 13i...13m, rn третьих ключей 14i...14m и m третьих элементов памяти 15i...15m.
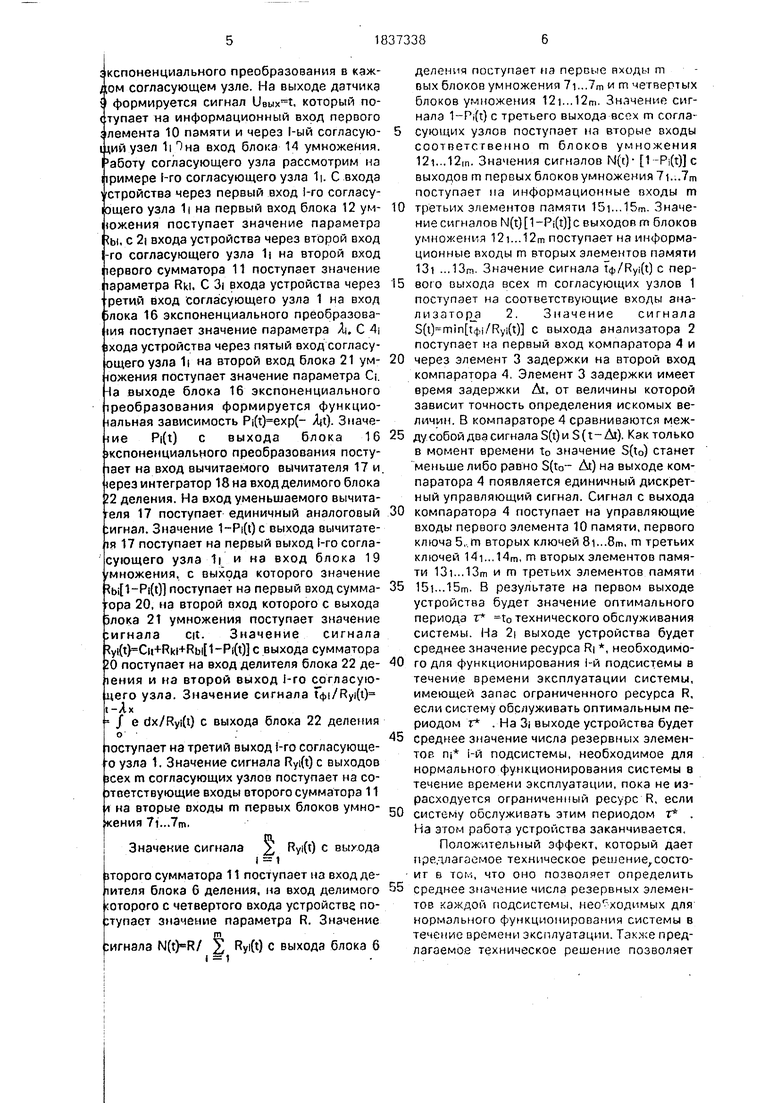
Каждый согласующий узел 1 (фиг,2) содержит блок 16 экспоненциального преобразования, вычитатель 17, интегратор 18, первый блок 19 умножения, первый сумматор 20, второй блок 21 умножения и блок деления 22.
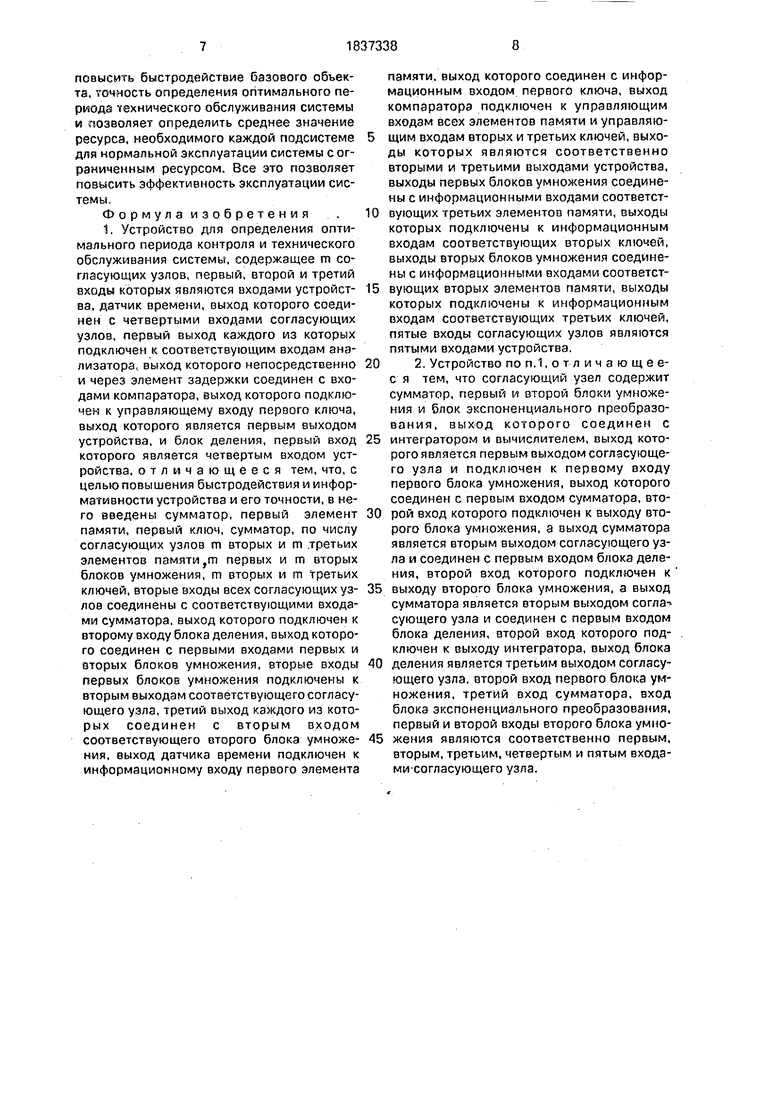
Блок 9 экспоненциального преобразования содержит управляемый элемент 23 и интегрирующий усилитель 24.
Блок экспоненциального преобразования работает следующим образом.
Управляемый элемент 23 представляет собой четырехполюсник, коэффициент передачи которого зависит от величины сигнала, поступающего на его управляющий вход. Если на управляющий вход поступает сигнал А , то коэффициент передачи управляемого элемента 23 равен А . Блок экспоненциального преобразования формирует на выходе функциональную зависимость ехр(-А t).
Устройство работает следующим образом.
При запуске устройства одновременно включаются в работу датчик 9 и блок 16
: кспоненциального преобразования в каж- лом согласующем узле. На выходе датчика i формируется сигнал который по- ( тупает на информационный вход первого ; лемента 10 памяти и через l-ый согласую- иий узел 1i Чна вход блока 14 умножения, аботу согласующего узла рассмотрим на фимере 1-го согласующего узла 1|. С входа устройства через первый вход 1-го согласующего узла 1| на первый вход блока 12 ум- южения поступает значение параметра ы, с 2i входа устройства через второй вход -го согласующего узла 1| на второй вход lepeoro сумматора 11 поступает значение 1араметра Rki. С 3i входа устройства через реши вход согласующего узла 1 на вход лока 16 экспоненциального прёобразова- шя поступает значение параметра AI. С А чхода устройства через пятый вход согласу- ощегоузла 1i на второй вход блока 21 ум- южения поступает значение параметра CL la выходе блока 16 экспоненциального феобразования формируется функцио- 1альная зависимость Pi(t)exp(- Ait). Значе- ше Pift) с выхода блока 16 жспоненциального преобразования посту- тает на вход вычитаемого вычитателя 17 и. tepes интегратор 18 на вход делимого блока 2 деления. На вход уменьшаемого вычита- еля 17 поступает единичный аналоговый :игнал. Значение 1-Pi(t) с выхода вычитате- 13 17 поступает на первый выход 1-го согласующего узла 1| и на вход блока 19 гмножения, с выхода которого значение поступает на первый вход сумма- ора 20, на второй вход которого с выхода Злока 21 умножения поступает значение сигнала cit. Значение сигнала ty(t} Cif -Rki+Rbi 1-Pi(t) с выхода сумматора 0 поступает на вход делителя блока 22 де- )ения и на второй выход 1-го согласую- цего узла. Значение сигнала Гф|/Ру|(г) t-Ax / е dx/Ryi(i) с выхода блока 22 деления
о :
поступает на третий выход f-ro согласующе0узла 1. Значение сигнала Ryi(t) с выходов icex m согласующих узлов поступает на со- пветствующие входы второго сумматора 11
1на вторые входы m первых блоков умножения 7i...7m.
Значение сигнала
2 МО
с выхода
i 1
ггорого сумматора 11 поступает на вход де- тителя блока 6 деления, на вход делимого которого с четвертого входа устройства поступает значение параметра R. Значение
сигнала N(t)R/ У Ryi(t) с выхода блока 6 1 1
деления поступает на первые входы m вых блоков умножения 7i...7m и m четвертых блоков умножения 12.„12т. Значение сигнала 1-Pi(t) с третьего выхода всех m согла- 5 сующих узлов поступает на вторые входы соответственно m блоков умножения 12i...12m. Значения сигналов N(t)- (T,)c выходов m первых блоков умножения 7i...7m поступает на информационные входы m
0 третьих элементов памяти 15i...15m. Значение сигналов N(t)1-Pj(t) с выходов т блоков умножения 12i...12m поступает на информационные входы m вторых элементов памяти 13i ...13m. Значение сигнала (t) с пер5 вого выхода всех m согласующих узлов 1 поступает на соответствующие входы анализатора 2. Значение сигнала S(t)min t4 i/Ryj(t) с выхода анализатора 2 поступает на первый вход компаратора 4 и
0 через элемент 3 задержки на второй вход компаратора 4. Элемент 3 задержки имеет время задержки At, от величины которой зависит точность определения искомых величин. В компараторе 4 сравниваются меж5 дусобой два сигнала S(t)nS(t- At). Как только в момент времени to значение S(t0) станет меньше либо равно S(t0- At) на выходе компаратора 4 появляется единичный дискретный управляющий сигнал. Сигнал с выхода
0 компаратора 4 поступает на управляющие входы первого элемента 10 памяти, первого ключа 5„т вторых ключей 8i...8m, m третьих ключей 14i...14m, m вторых элементов памяти 13i...13m и m третьих элементов памяти
5 15i...15m. В результате на первом выходе устройства будет значение оптимального периода т to технического обслуживания системы. На 2 выходе устройства будет среднее значение ресурса RI , необходимо0 го для функционирования 1-й подсистемы в течение времени эксплуатации системы, имеющей запас ограниченного ресурса R, если систему обслуживать оптимальным периодом т .На 3j выходе устройства будет
5 среднее значение числа резервных элементов Гц i-й подсистемы, необходимое для нормального функционирования системы в течение времени эксплуатации, пока не израсходуется ограниченный ресурс R, если
0 систему обслуживать этим периодом т . На этом работа устройства заканчивается.
Полож-ительный эффект, который дает
предлагаемое техническое решение,состо ит в том, что оно позволяет определить
5 среднее значение числа резервных элементов каждой подсистемы, необходимых для нормального функционирования системы в течение времени эксплуатации. Также предлагаемое техническое решение позволяет
повысить быстродействие базового объекта, точность определения оптимального периода технического обслуживания системы и позволяет определить среднее значение ресурса, необходимого каждой подсистеме для нормальной эксплуатации системы с ограниченным ресурсом. Все это позволяет повысить эффективность эксплуатации системы,
Формула изобретения 1, Устройство для определения оптимального периода контроля и технического обслуживания системы, содержащее m согласующих узлов, первый, второй и третий входы которых являются входами устройства, датчик времени, выход которого соединен с четвертыми входами согласующих узлов, первый выход каждого из которых подключен к соответствующим входам анализатора, выход которого непосредственно и через элемент задержки соединен с входами компаратора, выход которого подключен к управляющему входу первого ключа, выход которого является первым выходом устройства, и блок деления, первый вход которого является четвертым входом устройства, отличающееся тем, что, с целью повышения быстродействия и информативности устройства и его точности, в него введены сумматор, первый элемент памяти, первый ключ, сумматор, по числу согласующих узлов m вторых и m .третьих элементов памяти,т первых и т вторых блоков умножения, m вторых и m третьих ключей, вторые входы всех согласующих узлов соединены с соответствующими входами сумматора, выход которого подключен к второму входу блока деления, выход которого соединен с первыми входами первых и вторых блоков умножения, вторые входы первых блоков умножения подключены к вторым выходам соответствующего согласующего узла, третий выход каждого из которых соединен с вторым входом соответствующего второго блока умножения, выход датчика времени подключен к информационному входу первого элемента
памяти, выход которого соединен с информационным входом первого ключа, выход компаратора подключен к управляющим входам всех элементов памяти и управляющим входам вторых и третьих ключей, выходы которых являются соответственно вторыми и третьими выходами устройства, выходы первых блоков умножения соединены с информационными входами соответствующих третьих элементов памяти, выходы которых подключены к информационным входам соответствующих вторых ключей, выходы вторых блоков умножения соединены с информационными входами соответствующих вторых элементов памяти, выходы которых подключены к информационным входам соответствующих третьих ключей, пятые входы согласующих узлов являются пятыми входами устройства.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что согласующий узел содержит сумматор, первый и второй блоки умножения и блок экспоненциального преобразования, выход которого соединен с
интегратором и вычислителем, выход которого является первым выходом согласующего узла и подключен к первому входу первого блока умножения, выход которого соединен с первым входом сумматора, второй вход которого подключен к выходу второго блока умножения, а выход сумматора является вторым выходом согласующего узла и соединен с первым входом блока деления, второй вход которого подключен к
выходу второго блока умножения, а выход сумматора является вторым выходом согла- сующего узла и соединен с первым входом блока деления, второй вход которого подключен к выходу интегратора, выход блока
деления является третьим выходом согласующего узла, второй вход первого блока умножения, третий вход сумматора, вход блока экспоненциального преобразования, первый и второй входы второго блока умножения являются соответственно первым, вторым, третьим, четвертым и пятым входа- ми-согласующего узла.
г
tuЈ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения периода технического обслуживания изделия | 1988 |
|
SU1536415A1 |
| Устройство для определения ресурса системы | 1985 |
|
SU1256062A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1990 |
|
RU2009543C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ИЗДЕЛИЯ | 1991 |
|
RU2069894C1 |
| Устройство для определения оптимального периода технического обслуживания системы | 1981 |
|
SU976461A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2358320C2 |
| Устройство для определения требуемого ресурса технического изделия | 1989 |
|
SU1714636A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2342706C2 |
| Устройство для определенияОпТиМАльНОгО пЕРиОдА фуНКциОНиРО-ВАНия издЕлия | 1979 |
|
SU842881A1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1990 |
|
SU1755309A1 |
Изобретение относится к области вы- 4t слительной техники, в частности к устрой- ci вам контроля, и может быть использовано в кучных исследованиях и технике, где требуется находить оптимальное время начала контроля работоспособности системы, среднее значение числа резервных элементе в и ресурс каждой подсистемы, необходимые для нормального функционирования системы, имеющей ограниченный запас ресурса. Целью изобретения является повышение быстродействия и информативности устройства и точности определения оптимального периода технического обслуживания системы. Устройство содержит согласующие узлы,анализатор, элемент задержки, компаратор, блок деления, датчик времени, элементы памяти, сумматоры, m ключей, блоки умножения. Преимуществом устройства является то, что оно позволяет определять оптимальный период контроля и управления техническим состоянием системы, среднее число резервных элементов каждой подсистемы, необходимых для нормального функционирования системы в течение времени эксплуатации, и средний ресурс, необходимый каждой подсистеме для нормальной эксплуатации системы с ограниченным ресурсом. 1 з.п. ф-лы, 3 ил.
8CCZ.C81
(pt/&Z
фиг.З
№
L
