Изобретение относится к устройствам контроля и может быть использовано в научных исследованиях и технике, где требуется находить оптимальные периоды технического обе- луживания сложных технических систем и их подсистем, средний непроизводительный расход ресурса и запас ресурса, необходимый для функционирования этих систем в течение задан- ного времени.
Целью изобретения является расширение информативности устройства.
Считается, что сложная техническая система прекращает целевое функ- ционирование, когда у нее либо пол- .ностью израсходуется ресурс, либо наступит отказ в любой из ее подсистем.
Увеличить время полезного функцио- нирования системы можно путем увеличения запаса ограниченного ресурса, повышением надежности системы и введением рационального (оптимального по выбранному критерию) техничес- кого обслуживания, в результате которого своевременно устраняются отказы и восстанавливается работоспособность ее подсистем, а следовательТак как момент наступления отказа в системе случаен, то время полезного функционирования в общем случае является случайной величиной. Если не проводить, технического обслуживания системы,.то время, в течение которого она может полезно функционировать, будет соответствовать времени полезного функционирования.системы до отказа.
Повышение числа сеансов контроля и технического обслуживания увеличивает время полезного функционирования системы за счет устранения отказов, но, с другой стороны, повышается непроизводительньй расход ресурсов на техническое обслуживание, что сокращает ресурс на целевое функционирование. Отсюда следует, что существует такая периодичность технического обслуживания, при кото- рой обеспечивается минимум непроизводительного расхода ограниченного ресурса системы. Естественным стремлением является нахождение этой периодичности.
Любая сложная система, состоящая из п подсистем, должна эксплуатироваться в течение времени активного
существования Т . В режиме нормального функционирования и н состоянии отказа i -я подсистема в среднем расходует в единицу времени С; еди- ниц ресурса. Если в результате каждого сеанса контроля и технического обслуживания i -я подсистема расходует единиц ресурса, то можно составить уравнение баланса по единому ресурсу R для всех и подсистем сложной системы
i:N,(C;e; + g;) R, (1)
где t; - период технического обслуживания 1 -и подсистемы (или интервал времени между соседними сеансами технического обслуживания подсистемы) ;
NJ - число сеансов технического обслуживания ( -и подсистемы. , Так как момент наступления отказа в каждой 1 -и подсистеме случаен, то, используя вероятность безотказной работы Р (t) i-й подсистемы, можно записать выражение для среднего непроизводительного расхода ресурса i-й подсистемы
ССР.:,, N;{C;, -f p. (t)dt + (2) 0
Зная необходимое (или требуемое время активного существования сложной -системы Т и период технического обслуживания t каждой i -и подсистемы сложной системы, можно определить N; количество сеансов контроля и технического обслуживания для каждой конкретной, подсистемы
(3)
выражение (2) Т.
примет вид
::. - p,-(t)dt н- g;. о
(4)
55
Задача обослования периодичности технического обслуживания i -и подсистемы сложной системы по критерию минимума непроизводительного расхода ресурса выглядит так:, найти такой период с. при котором
ti
С., «) .H| 4;-j p;(t)dt
+ g;
(5)
10
2560624
функцию P; (t) на интервале 0,C;j первый сумматор 3, блок 4 управления обеспечивающий управление работой устройства, блок 5 памяти, первый 5 блок 6 умножения, второй сумматор 7, третий блок 8 умножения, первый блок 9 деления, первый регистр 10, второй регистр 11, блок 12 сравнения, первый, второй и третий ключи 13 - 15, второй блок 16 умножения, третий сумматор 17, четвертый блок 18 умножения, четвертью сумматор 19, пятый сумматор 20, шестой сумматор 21 и регистратор 22,
Датчик времени 1 содержит ждущий мультивибратор 23, интегратор 24, первый и второй регистры 25 и 26. Блок 4 управления состоит из элемента И-НЕ 27, ждущего мультивибрато- контроля i -и подсистемы (выражение 20 ра 28, счетчика 29, элемента 30 срав- 3) и оптимальном периоде ее контроля нения и дешифратора 31. Блок 5 памя- -г позволяет-через уравнение балан- ти содержит регистры 32 - 35, элемен- са по ресурсу из выражения (1) опре- зб и элементы ИЛИ 37. делить требуемый запас ресурса дпя Исходная информация о сложной сис- м-й подсистемы R; при заданном време-25 теме (Т , Р. (t), С;, g;, п, где
i 1,п) вводится через первый и второй входы устройства в блок 4 управления и блок 5 памяти, перед началом работы устройства одновременно накапливающие сумматоры 19 и 20, интеграВыражение (5) позволяет найти С; оптимальный период технического обслуживания 1 -и подсистемы, который обеспечивает мин .
С учетом соотнощения (5) минималь- ньм средний непроизводительный рас- осод ограниченного ресурса ё Гсисте- мы в целом можно определить следующим соотношением:
15
SS;« (6)
Информация о количестве сеансов
ни активного существования Т, сложной системы:
N;(Ci C; + g;) R;
(7)
30
Зная требуемый запас ресурса для каждой i -и подсистемы К; , можно найти требуемьй запас ресурса R дпя всей сложной системы
R HR,-,
(8)
40
ЧТО, в свою очередь, . позволяет определить величину полезно расходуемого ресурса R R - .
Такой подход к решению задачи определения ресурса системы позволяет определить оптимальный период тех-. нического обслуживания каждой подсистемы, необходимое число сеансов 45 контроля каждой подсистемы, расчитать непроизводительные расходы ресурса отдельных подсистем и всей системы.
При этом на вход датчика 1 времени подается запускающий импульс, ко- торьй поступает на ждущий мультивибратор 23, с выхода которого импульс, пропорциональный времени л с подается на интегратор 24, где суммируется с предыдущим .значением. На выходе инопределить требуемые запасы ресурса дпя каждой подсистемы и всей системы 50 тегратора 24 (выход датчика времени) и величину той части ресурса, кото- выдается сигнал j 4, где j - число рая полезно используется системой, при заданном времени активного существования.
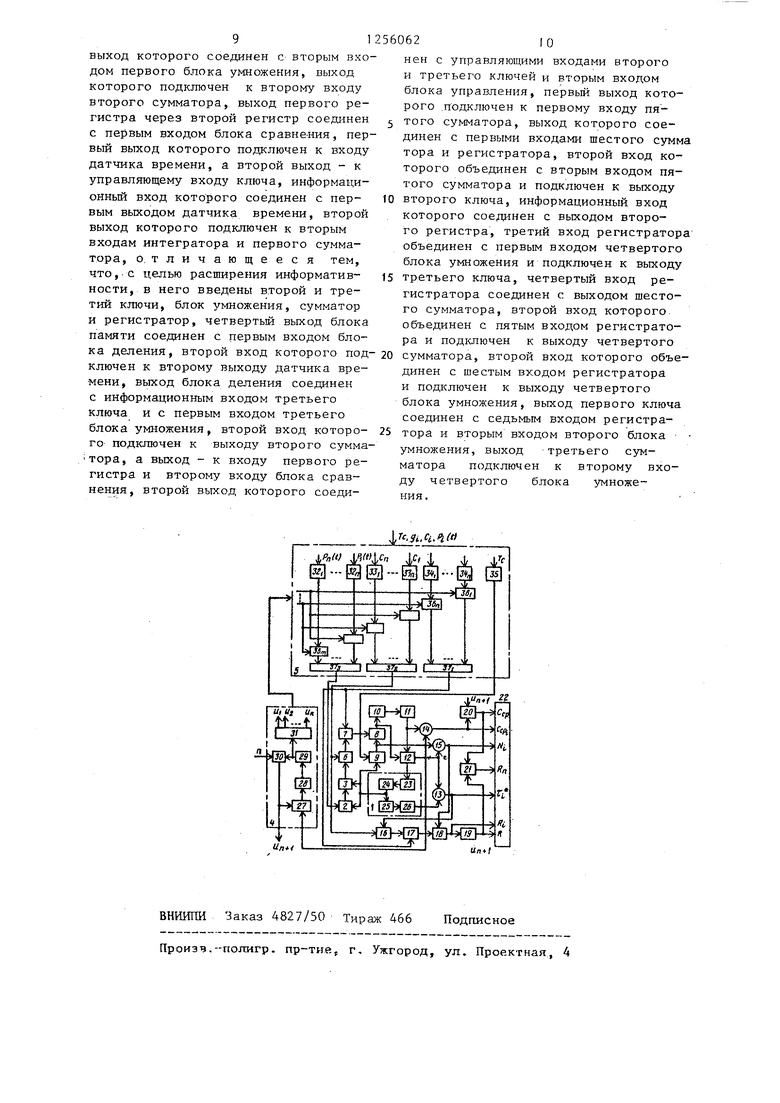
запускающих импульсов. С выхода интегратора 24 сигнал j а поступает также на регистр 25, где запоминает- На чертеже изображена функциональ-55 ся. С приходом сигнала (j + O Л со- ная схема устройства.держимое регистра 25 переписывается в
Устройство содержит датчик 1 вре- регистр 26. Таким образом, в регист- мени, интегратор 2, интегрирующий ре 26 в процессе работы датчика вре-
10
5
20 5
15
30
тор датчика 1 времени и счетчик блока 4 управления обнуляется.
Устройство работает следующим образом.
Датчик 1 времени с шагом д задает в порядке нарастания последовательность возможных значений времени С; контроля и технического обслуживания сложной системы, где
,
J
При этом на вход датчика 1 времени подается запускающий импульс, ко- торьй поступает на ждущий мультивибратор 23, с выхода которого импульс, пропорциональный времени л с подается на интегратор 24, где суммируется с предыдущим .значением. На выходе интегратора 24 (выход датчика времени) выдается сигнал j 4, где j - число
мени хранится значение времени на дТ меньше, чем на регистре 25 . Блок 4 управления вырабатывает серию управляюи, , и
I
и, и
п П
Каждый из этих импульсов определяет номер подсистемы сложной системы, при- водит соответствующие блоки устройства в исходное состояние и распределяет исходные данные С;, gj, P,-(t), где i 1, п, введенные в блок памяти, между блоками устройства. При этом на первый вход блока 4 управления поступает число п , равное числу подсистем контролируемой технической системы, которое подается на вход элемента 30 сравнения. На второй вхо блока 4 управления подается сигнал запуска, который через элемент И-НЕ
27проходит на ждущий мультивибратор
28этого блока, с выхода которого сигнал подается на счетчик 29, Содержимое счетчика 29 поступает на второй вход блока 30 сравнения и на дешифратор 31 блока 4 управления. На одном из выходов 31 появляется управляющий импульс U j (где i
ГТд). Как только содержимое счетчика станет равным п , на выходе элемента 30 появляется сигнал запрета, которьш подается на элемент И-НЕ 27 и закрьшает прохождение на блок 4 упраёления сигналов запуска, Этот же сигнал запрета одновременно является управляющим сигналом Uf,M Очередное значение. t;: поступает в интегратор 2, задавая верхний предел интегрирования функции P;(t), заносимой в него из блока 5 памяти (рассмотрим работу устройства для i-й подсистемы сложной системы). С ийтегратора 2 сигнал, соответствуюпщ времени безотказной работы i-й
- т .- f4
j Р; (t)dtj поступает
подсистемы
на первый вход первого сумматора 3. На второй вход этого сумматора поступает сигнал с датчика 1 времени, С выхода сумматора сигнал, соответствующий среднему времени нахождения i-й подсистемы в состоянии отказа I 4
t; - I Р; (t)dt . при периоде технического обслуживания данной подсистемы, равного С- , поступает на второй вход первого блока 6 умножения, на первый вход которого из блока 5 памяти вводится параметр , определяющий расход ресурса в единицу времени i -и подсистемой. Результат умп12560626
ножения, равный средней величине израсходованного ресурса i -и подсистемой в Состоянии отказа
.
с.(P.(t)dt),
to
засылается на второй вход второго сумматора 7. На первый вход этого сумматора поступает из блока 5 памяти параметра а; , определяющий расход ресурса на техническое обслуживание. Результат суммирования
If:;
g,i г Р; (t)dt) засылаетIо (
ся на второй вход третьего блока о умножения. Одновременно значение ;. поступает и на второй вход первого- блока 9 деления, на первый вход которого из блока памяти поступает параметр Т. (заданное время активного, существования системы). Результат деления, соответствующий N;: (количеству сеансов обслуживания i -и подсистемы на времени Т, засылается на первый вход третьего блока 8 умножения и на информационный.вход третьего ключа 15. Результат умно- J g, - с выхода третьего бложения С|,р. N. Р, (t)
5
5
0
ка 8 умножения поступает на первый регистр 10 памяти и на второй вход блока 12 сравнения. При выдаче блоком 4 управления управляющих сигналов и и,,. и,,..,, U.,f..,U в оба регистра 10 и 11 памяти устройства записывается число, заранее большее .предполагаемого необходимого ресурса R. В последующем, при передаче информации с первого регистра 10 памяти на второй регистр 11 памяти, ранее записанная информация на втором регистре 11 памяти подается на информационный вход второго ключа 14 и.переписьшается в блок 12 сравнения. В блоке 12 сравнения после выдачи датчиком 1 времени очередного значения Т;: сравниваются между собой две
одна из кото- . f IJ-1 1 J рых
l -lixui „, Г1 --ГП
Ср ij-i cpij )
соответствует текущему значению
5
J
м-1
нения
а другая - предшествующему Если в результате такого срав- окажется,. что ., , то с первого выхода блока 12 сравнения выдается управляющий сигнал датчика 1 времени на выдачу очередного
значения с
(
В противном спучае.
управляющий
т.е. при .,-C .. , сигнал выдается с второго выхода блока 12 сравнения на управляюпще входы ключей 13 - 15, а также на блок 4 управления для выдачи очередного управляющего сигнала U,, .
С выхода ключа 13 снимается сигнал, равный oптимaльнo ry периоду технического обслуживания данной
/л V
-и подсистемы Vj i-;j-, и засылаетс одновременно в регистратор 22 и на второй вход второго блока 16 умножения, на первый вход которого из блока 5 памяти поступает параметр С, определяющий расход ресурса в единицу времени -и подсистемой. С вы- |Хода блока 16 умножения произведение C; cj засылается на второй вход третьего сумматора 17, на первый рход которого поступает из блока 5 памяти параметр g . Результат сло- ения в виде g; + С; подается на второй вход четвертого блока 18 умножения. Одновременно с выхода третего ключа 15 сигнал, равный количес ву сеансов обслуживания i -и подсис темы N , поступает в регистратор 22
и на первьй вход четвертого блока 1 .умножения. Результат с выхода четветого блока 18 умножения, равный нео ходимому ресурсу для 1 -и подсистемы R.; N;(g; + ), засылается в регистратор 22 и в накапливающий сумматор 19, где суммируется суммой предыдущих значений и запоминается. В это же время с выхода ключа 14 величина среднего непроизводительно го расхода ресурса С.., соответствущая оптимальному периоду обслуживан С. , поступает в регистратор 22 и в накапливающий сумматор 20, где суммируется с суммой предыдущих значений и запоминается. После всех этих действий блок 4 управления вырабатывает следующий сигнал упраапения U; и работой всего устройства повторяеся для i + подсистемы. При этом исходная информация о контролируемо технической системе (Т, С P;(t),-
i &; записанная н
где i 1, п) ,
регистры блока 5 памяти (33 - 33)., считывается следующим образом,
На первый вход блока 5 памяти с блока 4 управления поступают управляющие, сигналы и,, Uj, ..., Uj,, которые открывают элементы И 36 и содержимое регистров 32 - 34 через схемы ИЛИ 37 поступают на первый, В.ТОРОЙ и третий выходы блока 5 памя
ти. Например, при поступлении на первый вход блока 5 памяти управляющего сигнала U , открьшаются элементы И 36,, И 36„, , Н 36, hM и а первом, втором и третьем выходах блока 5 памяти появляются соответственно величины g,. С,, P,(t). При поступлении управляющего сигнала U отрываются элементы И Збг, И
И 36
2 П +2
При этом на первом,
канчивается.
втором и третьем выходах будут соответственно значения g, С, P(t) и т.д. С четвертого выхода блока 5 памяти снимается значение Т. .
Когда будут проведены исследова- ния всех rv подсистем, блок 4 управления вырабатывает сигнал U и с выходов накапливаюнщх сумматоров 19 и 20 записываются в регистратор величины R, С , соответствуюпще - соотношениям (8) и (6). Кроме того, величина R с выхода четвертого сумматора 19 и величина С. с выхода пятого сумматора 20 подается на входы шестого сумматора 21, с выхода которого сигнал, соответствующий R R - С(, , записывается в регистратор 22.
После этого работа устройства за-
канчивается.
Формула изобретения
5
зо канчивается.
0
5
0
5
Устройство дня определения ресурса системы, содержащее датчик , времени, интегратор, первый, второй, третий, четвертый и пятый сумматоры, первый, второй и третий блоки умножения, блок деления, блок памяти, блок управления, первый и второй регистры. блок сравнения и ключ, первый вход блока управления является первым , входом устройства, первый выход блока управления соединен с первым входом четвертого сумматора, вторые выходы блока управления подключены к первым входам блока памяти, вторые входы которого являются вторым входом устройства, первый выход блока памяти соединен с первыми входами второго и третьего сумматоров, второй вход которого подключен к выходу второго блока умножения, первый вход которого объединен с первым входом первого блока умножения и подключен к второму выходу блока памяти, третий выход которого соединен с первым входом интегратора, выход которого подключен jc первому входу первого сумматора,
91
выход которого соединен с вторым входом первого блока умножения, выход которого подключен к второму входу второго сумматора, выход первого регистра через второй регистр соединен с первым входом блока сравне-ния, первый выход которого подключен к входу датчика времени, а второй выход - к управляющему входу ключа, информаци- онньш вход которого соединен с первым выходом датчика времени, второй выход которого подключен к вторым входам интегратора и первого сумматора, о. тличающееся тем, что, с целью расширения информативности, в него введены второй и третий ключи, блок умножения, сумматор и регистратор, четвертьй выход блока памяти соединен с первым входом блока деления, второй вход которого подключен к второму выходу датчика времени, выход блока деления соединен с информационным входом третьего ключа и с первым входом третьего блока умножения, второй вход которого- подключен к выходу второго сумма- iTopa, а выход - к входу первого регистра и второму входу блока сравнения, второй выход которого соеди256062
10
ней с управляющими входами второго и третьего ключей и вторым входом блока управления, первый выход которого .подключен к первому входу пя- того сумматора, выход которого соединен с первыми входами шестого сумма тора и регистратора, второй вход которого объединен с вторым входом пятого сумматора и подключен к выходу
второго ключа, информационный вход которого соединен с выходом второго регистра, третий вход регистратора объединен с первым входом четвертого блока умножения и подключен к выходу
третьего ключа, четвертый вход регистратора соединен с выходом шестого сумматора, второй вход которого, объединен с пятым входом регистратора и подключен к выходу четвертого
сумматора, второй вход которого объединен с шестым входом регистратора и подключен к выходу четвертого блока умножения, выход первого ключа соединен с седьмым входом регистратора и вторым входом второго блока - - умножения, выход третьего сумматора подключен к второму входу четвертого блока умножения.
Unti
c.3i.,Ci,Pi(t)
Untt

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определенияОпТиМАльНОгО пЕРиОдА фуНКциОНиРО-ВАНия издЕлия | 1979 |
|
SU842881A1 |
| Устройство для определения периода технического обслуживания изделия | 1988 |
|
SU1536415A1 |
| Устройство для определения оптимального периода технического обслуживания системы | 1981 |
|
SU976461A1 |
| Устройство для определения оптимального периода технического обслуживания системы | 1989 |
|
SU1679512A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2342706C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2358320C2 |
| Устройство для определения оптимального периода контроля и технического обслуживания системы | 1991 |
|
SU1837338A1 |
| Устройство для определения объема технического обслуживания системы | 1987 |
|
SU1499383A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ПРОГРАММ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СРЕДСТВ СИСТЕМЫ | 2009 |
|
RU2429542C2 |
| Устройство для определения ресурса изделия | 1982 |
|
SU1022197A1 |
Изобретение относится к устройствам контроля и может быть использовано в научных исследов аниях и технике, где требуется находить оптимальные периоды технического обслуживания сложных технических систем и их подсистем, средний непроизводительный расход ресурса и запас ресурса, необходимый для функ- 1ц1онирования этих систем в течение заданного времени. Целью изобретения является расширение информативных возможностей устройства. Устройство содержит датчик времени. задающий время работы системы для последующего анализа устройством. Интегратор находит время безотказной работы каждой подсистемы за интервал времени, задаваемый датчиком. В сос- :тав устройства также входят шесть сумматоров, блок управления, выходы которого управляют работой блока памяти, запоминающего параметры для каждой подсистемы, и сумматоров. Переход .к анализу очередной подсистемы осзпдествляется после поступления сигнала с блока сравнения на блок управления. Четыре блока умножения и блок деления формируют ресурсные показатели системы. Для определения момента перехода от анализа одной подсистемы к анализу другой первый и второй регистры подключены к блоку сравнения. Ресурсные показатели системы и всех ее подсистем коммутируются через ключи на регистратор, где происходит накопление и индикация данных по системе, получаемых в устройстве. 1 ил. i (Л ISD ел а о
8НИИПИ Заказ 4827/50 Тираж 466 Подписное Произв.-полигр. пр-тие, г, Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР №922829, кп | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для определенияОпТиМАльНОгО пЕРиОдА фуНКциОНиРО-ВАНия издЕлия | 1979 |
|
SU842881A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
