КуКрКм устанавливающие функциональную
ь между параметрами системы (1) и ко- ициентами С2 и CL Используемые в ос- ном изобретении функциональные и с соответствующими козффициентэередачи и связи обеспечивали удовлет- ;ние условий (4)-(7). Движение такой
емы в скользящем режиме описывалось внёнием
tAlt+A2-lA2t.
К2
ZL
(7)
Јl(t) Ai
(8)
Ai и A2 - постоянные интегрирования.
1сящие от начальных условий; At и А2 ни характеристического уравнения 5 0. Для получения максимальной скорости хания Ј1 в основном изобретении ис- зовано соотношение
.
(9)
25
30
В зтом случае, как показано в основном 5ретении, выражение (8) принимало вид ei(t) (Ai + A2t)e-(C2/2)t(10) Таким образом, скорость затухания ьзящих движений электропривода при отонном характере переходного проса зависит от величины коэффициента величивзясь с ростом С2, определяемо- основном изобретении по закону
2) f W 2) + Va(l 55-3(125 (11)
и формирующегося на выходе шестого затора 26 основного изобретения. Однако анализ соотношения (11) пока- 35 ает следующее. Величина козффициен- 2 зависит только от текущих значений аметроа системы (1), в частности от теку- о значения величины I 2 , и не зависит еличины коэффициента Ку передачи уси- 40 зля 5 мощности. Последнее говорит о оиспользовании ресурсов управлении, ие того, при отклонении параметров си- ль (1) от номинальных значений или при равильной настройке параметров регу- 45 ра равенство (5) из-за неточного опре- гния С2 по (1.1) может нарушаться. чем при неточностях определения С2 ;станет выполняться.и условие (9). Неость в определении С2 по (11) может 50 исходить при некоторой погрешности в ерении текущего значения момента )ции 12 . При сохранении работоспо ости основного изобретения е этом ае снижается 6bicTpofleftctBne и точ- ь его работы.
Для того чтобы при том же, что и в ос- tOM изобретении, значении коэффици- передачи усилителя 5 мощности
повысить быстродействие и сохранить точность его работы, в данном устройстве для управления электроприводом робота используется управляющее воздействие вида
U( Јil+ 1Ы+К11 М -К2 lGI,signS
(12)
При использовании (12) условия устойчивого возникновения и существования скользящего режима работы (S-S 0)систе- 0 мы (1) примут вид
I fj + 1 - Г1 Гт - Р- -11 - Т I V 1 Ь2 I - -1- т L -
I э 12.I э I м К/У RlЈ
5
0
Тэ Ј
ICi+(Тм
т,+
КрКу
КмКо, Г9 (КмК(0 + РК8)
IVL
(14)
ТэТ„Кй)
При использовании условия (9) в дополнительном устройстве возникающий в нем скользящий режим при удовлетворении (13) и (14) (так же, как и в основном изобретении) описывается уравнением (10), т.е. скорость движения в скользящем режиме по-прежнему зависит от величины С2. Однако, во-первых, в дополнительном устройстве С2 с учетом (9) необходимо определять из соотношения
„2i
С2
:гг„ ( 1 , KB
С2 (Т7+1
;)
4КрКуу ТэТмКо; U
(15)
которое непосредственно получается из (13) при у 1. Так как С2 в (15) непосредственно зависит не только от текущего значения величины 12 . но и от величины коэффициента Ку усилителя 5, то это позволяет получить величину С2 в дополнительно заявляемом устройстве, большую, чем в основном изобретении, и тем самым эффективнее использовать имеющиеся ресурсы управления. Во-вторых, соотношение (15) определяет некоторый запас, предотвращающий срыв скользящего режима из-за возможности неточного определения параметра г либо при отклонении других параметров системы от их номинальных значений. При этом снимается и важное требование к точности реализации соотношения (7), используемого в основном изобретении. Таким образом, преимущества дополнительно заявляемого устройства очевидны.
Выражение (15) представляет собой полином третьей степени относительно С2. Для нахождения вещественного корня полинома третьей степени вида (15) воспользуемся стан- дартной формулой Кардана
-q+fcp+p1
1 11 i i n. KnK
+ Тг)
Кй)1
Ы
-g(i+T.
„2,13 2 ,1 Кв.з . КмКуКр q-fp.) .J
V v v - - -М6(у +
191Г
гКуКрКМч2
Здесь следует указать на то, что в электроприводах постоянного тока электрическая постоянная времени Тэ, как правило, в десятки раз меньше электромеханической постоянной времени Тм. Кроме того, коэффициент усиления современных усилителей достаточно высок (Ку 100). Поэтому (q + pVO..(17) а следовательнайпеоация извлечения квадратного корняусг + р выполняется корректно. Справедливость (17) и положительность Са (Са 0), рассчитанное по (16) с учетом 126 {I Snin.l ZmaxL проверялась авторами для различных серий электродвигателей (ДПГ ДПР, ДПМ, ДПУ, ПЯ). Поэтому выражение (16) правомерно использовать для настройки параметра Cz в дополнительно заявляемом устройстве для управления электроприводом робота.
Таким образом, настраивая С2 по (16), можно получить максимальную (для текущего значения параметра системы (1)- момента инерции нагрузки Ij ), скорость затухания в скользящем режиме ошибки Ј1 по закону (10). При этом быстродействие и точность дополнительно заявляемого устройства будет выше, так как оно эффективнее использует имеющиеся ресурсы управления и менее чувствительно к малым динамическим неидеальностям электропривода (погрешностям в измерениях параметров и отклонения последних от их номинальных значений). Условие существования скольжения (13), (14), как и в основном изобретении, всегда может быть удовлетворено выбором соответствующего значения коэффициента передачи Ку усилителя 5 мощности. Условие (14) выполняется в силу соответствующего выбора величины Ку с учетом функциональных зависимостей (9), (16). которые используются для расчета Ci и С2. Блоки, реализующие указанные зависимости, имеют естественные погрешности, однако при достаточно большом значении Ку это несущественно сказывается на качестве процессов в устройстве, а следователь- но, сохраняется достигаемый в нем положительный эффект, Подтверждение этому можно найти, например, в моногра
фии Барбашина Е.А. Введение в теорию .устойчивости. М.: Наука, 1967, с 73-74.
Как и в основном изобретении по усло- виям-технологического процесса приведенное суммарное значение момента инерции нагрузки I 2 может дискретно принимать любое значение из широкого диапазона 2 е Snin- Snaxl перед началом каждого рабочего цикла, причем во время рабочего цикла изменения Ј не происходит либо 12 меняется незначительно. Одновременно будем считать, что момент нагрузки Mi, . приведенный к валу
электродвигателя 6, складывается из моментов сухого трения МСтр Мт sign Од , вязкого трения Мв Кв Од и МВн - внешнего нагрузочного момента т.е.
Мн Мвн+Мв + Метр,(18)
где Мт - коэффициент, пропорциональный моменту сухого трения.
Такой характер приложения моментных нагрузок имеет место в довольно широком классе систем управления, например в следящихсистемах манипуляционных роботов. Для электродвигателя 6 постоянного тока справедливо соотношение
I 2 Од Км - Мн МДИ„,(19)
где Од ,Од - угловая скорость и ускорение вращения вала электродвигателя 6; Мдин - величина динамического момента; i - якорный ток двигателя. Из (19) следует, что
(20)
Оценка (20), как и в основном изобретении, используется для настройки коэффициента С2 по выражению (16).
Таким образом, мы получили все необходимые соотношения, выполнение кото
рых позволит организовать устойчивый
скользящий режим работы дополнительного заявляемого устройства.
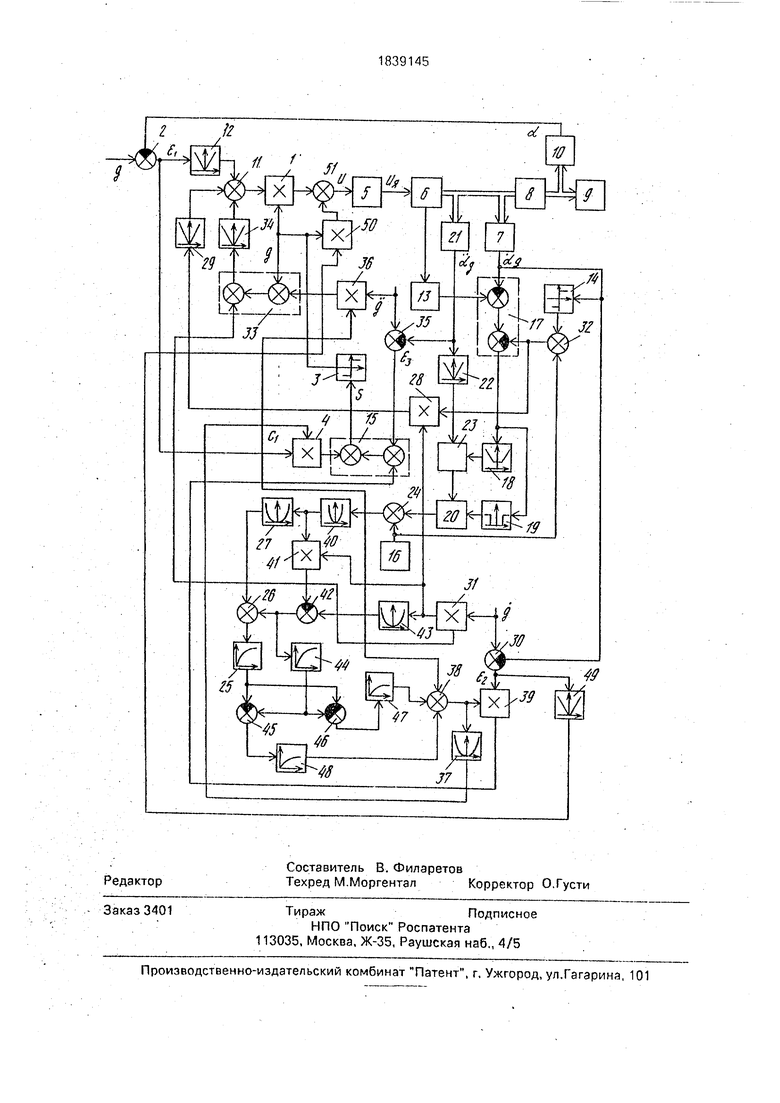
В исходном состоянии дополнительно заявляемого устройства на выходе датчика
ю углового положения сигнал соответствует фактическому угловому положению а выходного вала редуктора 8, сигналы g, g, g и & равны нулю. Поскольку в исходном состоянии устройства сигналы на выходах датчиков 7, 21 и 13 угловой скорости, углового ускорения и тока электродвигателя соответственно равны нулю, то и на выходах второго релейного элемента 14, четвертого сумматора 17, второго выпрямителя 22, бло5 ка 23 деления, третьего релейного элемента 19, блока 20 выборки и заполнения, третьего квадратора 43, четвертого блока умножения 31, двенадцатого сумматора 42. четвертого функционального преобразователя 44.
тр«
тьего блока умножения 28, третьего выпрммитепя 29 и восьмого блока 50 умноже- сигналы также равны нулю. На выходе атчика 16 сигнала установлен положиНИ
за;
те/
го
вы:
го
ио
СИ1
ФУ
лис
44
a i
пр
изс
эле иента 3 сигнал S имеет вид (2). Кроме
тог , для реализации соотношения (20), как
ив сновномизобретении, коэффициентпере/ ачи датчика 13 якорного тока совместно
ьный уровень сигнала, значения которо- определено ниже. В результате на одах пятого сумматора 24, одиннэдцато- :умматора 38, второго квадратора 37 в одном состоянии устройства имеются налы положительного уровня. Третий кционэльный преобразователь 40 реа- ует формулу у х3, второй 25 и четвертый ункциональные преобразователи -у ЙГ ятый 47 и шестой 48 функциональные образователи -у хТ Как и в основном Зретении, на выходе первого релейного
эффициентом передачи по первому вхо- етвертого сумматора 17 устанавливает- авный Км, коэффициент передачи по
СК(
ДУ
ся I
второму инвертирующему входу четвертого
сумматора 17 устанавливается равным Кв,
коэффициент передачи по его третьему инверррующему входу - равным Мт. Второй
рел
slgr
сум
Км
ражения (20). Первый функциональный преo6fазователь 18, как и в основном
изо ретении, реализует функцию
(|Мдин| ПРИ |Мдин| А
Fi4
LA при|МДин Д(21) где А - малая положительная константа. Таким образом, при |МДИн1 А в блоке 23
зйный элемент 14 реализует функцию Од . В результате на выходе четвертого иатора 17 формируется сигнал МДИн ш -Мн, соответствующий знаменателю вы
и
ния вычисляется отношение модулей чин Од и Мдин, т.е. значение (см. Три малых значениях I МДИн Двблооснс
лей пом коэ(|
вном изобретении, реализует функцию
ft при | Мдин I A F2 -f
О при |МЯин1 А(22) 1ри сигнале Г на выходе третьего ре- ого элемента 19 блок 20 выборки и заикания передает с единичным фициентом сигнал с выхода блока 23
и
дел вел
20).
ке 2Й деления осуществляется деление на А Третий релейный элемент 19. как и а
24,
деления на первый вход пятого сумматора
также на первый вход третьего 28,
четв ртого 31 и седьмого 41 блоков умножения, э также на вход третьего квадратора 43. При сигнале F2 а 0 на выходе блока 20 вы- борк л и запоминания сохраняется уровень сигн 1ла, имеющий место в момент переклю
20
5 10 15
25
30 35
40
45
50
55
чения. Таким образом, на выходе блока 20 при |МДин I А будет сигнал, равный текущему значению 1Ј1, а при |МДИн1 Асигнал Ijfyn). где tn - момент времени, при котором величина 1МДИн1 входит в область -А, +Д. При включении дополнительно заявляемого устройства для управления электроприводом робота и подачи на его входы программных задающих воздействий g, g, g и д, на выходах соответствующих сумматоров появляются сигналы ошибок ei.C2.E3. В результате на выходе второго сумматора 11 (как и в основном изобретении) формируется сигнал ( leil + Kil + Кг I GI), а на выходе пятого выпрямителя 49 - сигнал lezl. . Следовательно, при включении дополнительно заявляемого устройства на выходе пятнадцатого сумматора 51 формируется сигнал ( leil + lal + Ki + Кг Gl) sign S, точно совпадающий с видом соотношения (12). При этом выходной вал электродвигателя 6 начинает вращаться в направлении, соответствующем уменьшению ошибки ei.
В процессе движения электропривода при некоторой комбинации значений Ј1,Ј2,Јз происходит смена знака сигнала S, вызывающая переключение первого релейного элемента 3.
Согласно (12) сигнал U« на выходе усилителя 5 мощности меняет знак, скорость Од и ускорение Од уменьшаются и снова сигнал S меняет знак, первый релейный элемент 3 переключается и т.д. В результате возникает скользящий режим. Для обеспечения устойчивого скользящего режима, про.текающего с максимально возможной скоростью для текущего значения 12 € I Snin.l StiaxJ- как и было указано выше, Ci и С2 должны быть связаны соотношениями (9), (13), (14) и (16).
.Коэффициент передачи по первому входу пятого сумматора 24 настраивается равным Кв, на который поступает сигнал с выхода блока 20 выборки и запоминания,
равный текущему значению I Ј1. Коэффициент передачи по второму входу пятого сумматора 24 равен Тэ . Уровень выходного сигнала источника зад атчика 16 сигнала устанавливается равным 1 (например, 1В) и подается на второй вход пятого сумматора 24. В результате на выходе последнего формируется сигнал ЛУ1 + Кв ) который преобразуется в третьем функциональном преобразователе 40 к виду ЛУ1 + KB I21)3- Первый квадратор 27 преобразует сигнал с
выхода третьего функционального преобразователя 40 к риду НУ1 + Кв IS1)6- Коэффициент передачи по первому входу седьмого блока 41 умножения устанавливается равп
ным KMKpKyL 1, по второму входу- j -у,
где, напримеру 0,9 . 1. Третий квадратор 43 преобразует сигнал с выхода блока
20 выборки и запоминания к виду I 3. Коэффициент передачи по первому входу .двенадцатого сумматора 42 настраивается
равным 16 (- р)2 , по второму инвертирующему входу - 1. В результате на выходе двенадцатого сумматора 42 сигнал равен
2 ( 1 . KB -л КрКуКм 27Ч7 т
IZ t- S
y +
-H6(КцКуК
.уКрч2
3)W.
+ РЗ)
, КмКуКр .э+Т 1ST
точно совпадает с выражением (q см. (16)}.
Коэффициент передачи по первому входу шестого сумматора 26 устанавливается равным 1, а по второму входу - равным 1/272. На выходе шестого сумматора 26 формируется сигнал
2.f-l 27 4%,
Чф2-(в
о
точно соответствующий величине q в соотношении (16). Поскольку второй 25 и третий 40 функциональные преобразователи реализуют формулу у |/х пятый 47 и шестой 48 функциональные преобразователи - формулу у $ х а коэффициенты по входам тринадцатого 45 и четырнадцатого 46 сумматоров равны 1, то на выходе пятого функционального преобразователя 47 сигнал равен -q pj, а на выходе шестого
- - 3/
щ $шюнального преобразователя 48 y-q Г + р3 . Коэффициенты по второму и третьему входам одиннадцатого сумматора 38 настраиваются равными 1, по первому входу- равными 1/3. В результате на выходе по- следнего формируется сигнал
С2 foTR оЖТ-ь 1 (Ј +
точно совпадающий с (16). устанавливающий требуемый характер связи между параметрами изменяемой и неизменямой частями дополнительно заявляемого устройства, причем второй квадратор 37, на вход которого с коэффициентом передачи 1 /4 подается сигнал с выхода одиннадцатого сумматора 38, реализует соотношение (9).
Коэффициенты передачи по второму и третьему входам третьего сумматора 15. по входу пятого выпрямителя 49 устанавливаются равными Кр. Первый 12. второй 22 и
пятый 49 выпрямители реализует функцию у Ixl . Первый 27, второй 37 и третий 43 квадраторы реализуют функцию у х2. В третьем сумматоре 15 в соответствии с выражением (2) формируется сигнал S.
Необходимо отметить, что настройка источника постоянного сигнала и коэффициента передачи по второму входу пятого сумматора 24 может быть другой, важно лишь сохранить тем же произведение уровня его сигнала на соответствующий коэффициент передачи.
Из указанного следует, что за счет дополнительно введенных блоков и связей в дополнительном устройстве для управления
электроприводом робота при 1МДин Д выполняется автоматическая подстройка коэффициентов гиперповерхности скольжения р 0 Ci и С2 на основе оценки величи,1
ны 2
определяемой по соотношению
(20). Это позволяет обеспечить последней максимально возможное быстродействие с точки зрения имеющихся ресурсов управления электропривода (мощности усилителя
5), что выгодно отличают дополнительное устройство от основного.
При входе в область МДИн1 Д подстройка коэффициентов Ci и С2 прекращается. Но за счет выбора соответствующей
малой величины Д появляющаяся погрешность всегда может быть сведена к допустимой по условию конкретного задания, так как Д может быть практически сколь угодно малой величиной (достаточной для реализации операции деления аналоговых сигналов на типовых электронных элементах без существенной погрешности). Кроме того, в до- полнительном устройстве снижены требования к высокой точности реализации
соотношения (10). т.е. снижены требования к точности измерения параметров электропривода. Таким образом, дополнительное устройство становится менее чувствительным к динамическим неидеалькостям злектропривода по сравнению с основным устройством, что также положительно сказывается на быстродействии и точности его работы.
Техническая реализация дополнительного изобретения не вызывает затруднений, так как в ней используются типовые электронные элементы. (56) Авторское свидетельство СССР № 1664548, кл. В 25 J 13/00, 1990.
Формула изобретения
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ РОБОТА по авт. св. 1664548, отличающееся тем, что, с цейью повышения быстродействия и точ- |ти в работе, оно дополнительно содер- третийфункциональный образователь, седьмой блок умноже- , .двенадцатый сумматор, третий квад- ор, четвертый функциональный i юбразователь, тринадцатый и четырнадцатый сумматоры, пятый и шестой функциональные преобразователи, пятый трямитель, восьмой блок умножения, надцатый сумматор, первый вход кото- Q подключен к выходу первого блока умножения, второй вход - к выходу восьмо- рлока умножения, а выход подключен к ду усилителя мощности, выход пятого матера подключен соответственно к рому входу пятого блока умножения, йу третьего функционального преобра 1ателя, первому входу одиннадцатого сумматора, а выход блока выборки и запоминания подключен через третий квадра- к первому входу двенадцатого матора, второму входу четвертого бло- умножения и первому входу седьмого ка умножения, второй вход которого (ключен к выходу третьего функционо
жу
пр
нир
ра пр
го вх cytf
ВТ
вх
30
toff су rj .ка
бЛ
по,
0
нального преобразователя и входу первого квадратора, выход которого подключен к первому входу шестого сумматора, второй вход которого соединен с выходом двенадцатого сумматора и через четвертый функциональный преобразователь с первым входом тринадцатого сумматора и первым инвертирующим входом четырнадцатого сумматора, выход которого через пятый функциональный преобразователь подключен к второму входу одиннадцатого сумматора, выход которого подключен к второму входу шестого блока умножения и входу 5 второго квадратора, выход задатчика сигнала подключен к второму входу пятого i сумматора, выход седьмого блока умноже- подключен к второму инвертирующему входу двенадцатого сумматора, выход шес- 0 того сумматора через второй функциональный преобразователь подключен к вторым инвертирующим входам четырнадцатого и тринадцатого сумматоров, выход тринадцатого сумматора через шестой функцио- 5 нальный преобразователь подключен к третьему- входу одиннадцатого сумматора, ;выход седьмого сумматора через пятый .выпрямитель подключен к первому входу |восьмого блока умножения, второй вход которого соединен с вторым входом первого блока умножения и выходом первого релейного элемента.
0
//
ct
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2359306C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2015 |
|
RU2593735C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2363972C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2004 |
|
RU2277258C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2562400C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2423224C2 |
| Самонастраивающийся электропривод манипулятора | 2015 |
|
RU2606372C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443542C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2461036C1 |