кода скорости, счетчика хранения кода скорости, тактового генератора, инвертора и триггера, причем первый выход импульсного датчика обратной связи соединен с входом счетчика кода позиции, с первым входом логического элемента И. с входом инвертора и с первым входом триггера: второй выход импульсного датчика обратной связи соединен с вторым входом триггера: второй вход логического элемента И соеди- нен с первым выходом тактового генератора, а выход его - с первым входом счетчика формирования кода скорости, а второй вход его соединен с вторым выходом тактового генератора: выходная шина счетчика фор- мирования кода скорости соединена с первым входом счетчика хранения кода скорости, второй вход которого соединен с третьим выходом тактового генератора, а выход инвертора соединен с третьим вхо- дом триггера.
Переключатель сигнала скорости состоит из многовходового логического элемента И опорной скорости, многовходового логического элемента ИЛИ, инвертора, силового ключа и триггера, причем первый вход много входового логического элемента И основной регулируемой скорости соединен с выходом узла сравнения скорости, а второй вход его соединен с выходом логического элемента ИЛИ, а выход его - с первым входом многовходового логического элемента ИЛИ; первый вхЬд многовходового логического элемента И опорной скорости соединен с выходом узла сравнения опорной скорости, второй вход его соединен с выходом инвертора, а выход его соединен с вторым входом многовходового логического элемента ИЛИ; первый вход логического элемента ИЛИ соединен с третьим выхо- дом блока обработки сигнала обратной связи, второй вход его соединен с вторым выходом узла сравнения позиции, а выход его соединен с вторым входом многовходового логического элемента И основной регу- лируемой скорости и входом инвертора, управляющий вход силового ключа соединен с вторым выходом узла сравнения позиции, а вход триггера соединен с втооым выходом узла сравнения позиции. Блок-па- мяти выполнен в виде ОЗУ. сметчика, одно- вибратора и блока задания адреса, счетный вход счетчика является вторым входом блока памяти, аход сброса соединен с выходом одноеибрэторэ. я выход - с адресным FJXO- дом ОЗУ. вход данных ОЗУ является первым входом блока пам яти, з вход переключения режима работы является управляющим входом запис-.,-позиционирование блока памяти и соединен с входом одио иГфятора,
выход блока задания адргга .. f адресным входом ОЗУ.
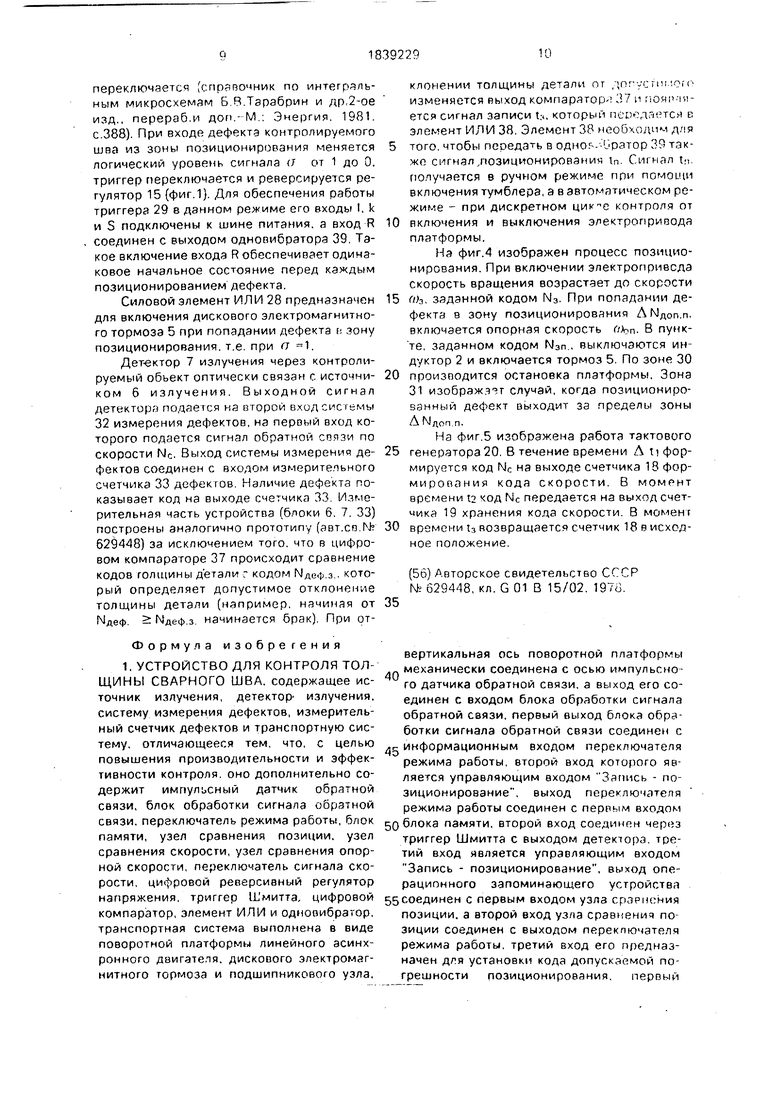
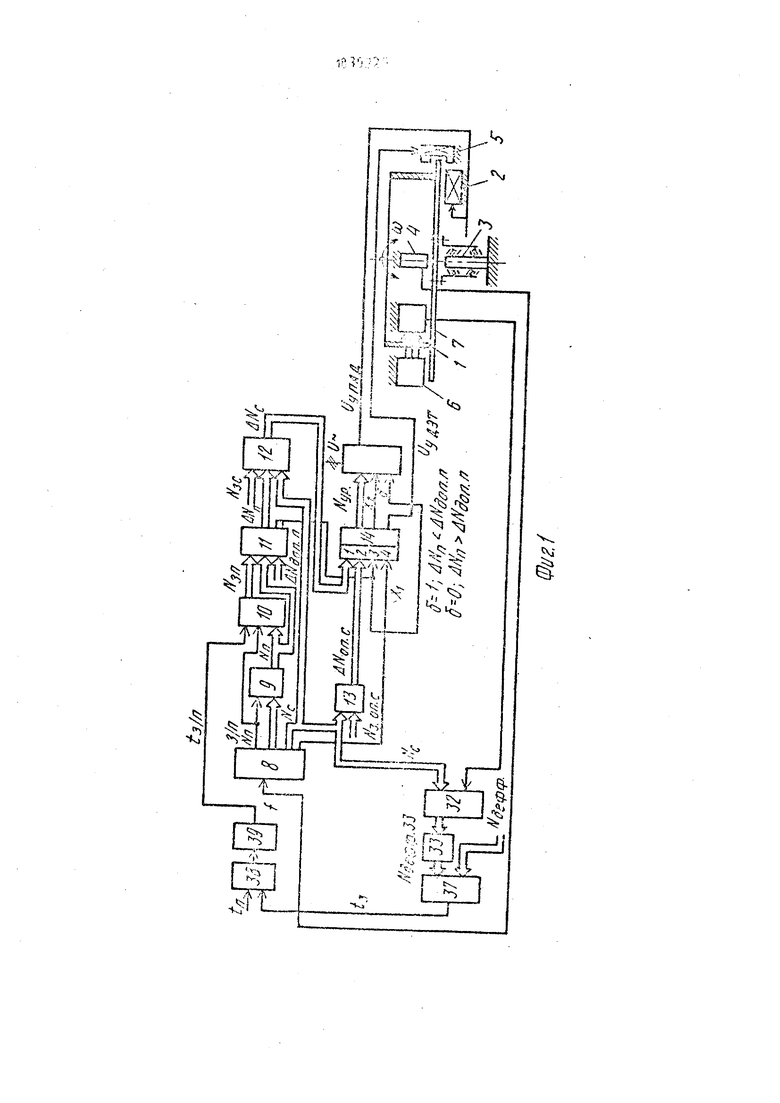
На фиг,1 представлена структур,пя ма предлагаемого устройс-т -п контрой .ч от щины сварного шва: HO .риг.2 - блок обработки сигнала обратной связи; на фиг.З
- переключатель сигнала скорости; на фиг.4
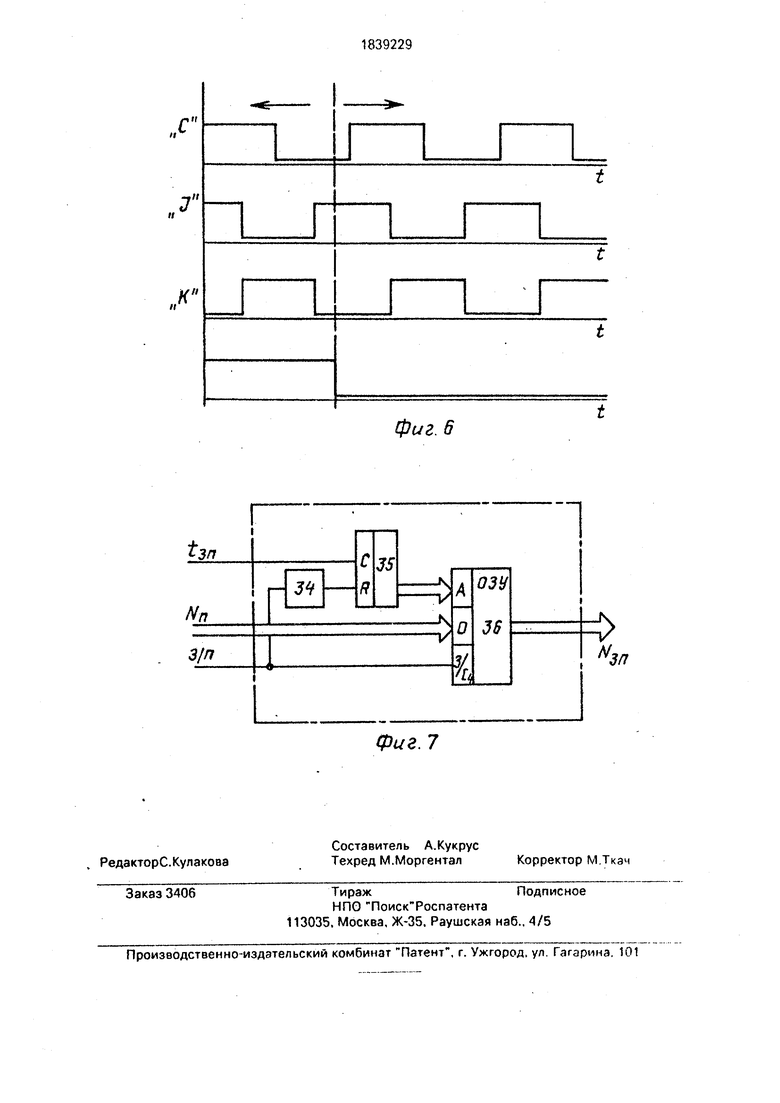
- траектория процесса позиционирования: на фиг.5 - принцип работы тактового генератора: на фиг.6 - принцип работы узла определения направления вращения (блоки 21, 22); нд фиг.7 - блок формирования адреса ячейки ОЗУ.
Устройство для контроля толщины сварного шва включает поворотную платформу 1, индуктор 2 линейной асинхронной машины, вертикальную ось с подшипниковым узлом 3. импульсный датчик 4 обратной связи, дисковый электромагнитный тормоз 5, источник б излучения, детектор 7 излучения. блок 8 обработки сигнала обратной связи, переключатель 9 режима работы, оперативное запоминающее устройство 10, узел 1 сравнения позиции, узел 12 сравнения скорости, узел 13 сравнения опорной скорости, переключатель 14 сигнала скорости, цифровой реверсивный регулятор 15 напряжения, счетчик 16 кода позиции, логический элемент и 17, счетчик 18 кода скорости, сметчик 19 хранения кода скорости, тактовый генератор 20. инвертор 21. триггер 22, многовхо- довый логический элемент И 23 основной регулируемой скорости, многоходовый логический элемент И 24 опорной скорости, многовходовый логический элемент ИЛИ 25, логический элемент ИЛИ 26, инвертор 27, силовой ключ 28, триггер 29, процесс торможения в заданной зоне 30 позиционирования, процесс торможения вне заданной зоны 31 позиционирования, система 32 измерения дефектов, измерительный счетчик 33 дефектов, одновибратор 34, счетчик 35. оперативно-запоминающее устройство 36, цифровой компаратор 37, элемент ИЛИ 38. одновибратор 39.
Устройство для контроля толщины сварного шва работает следующим образом.
Индуктор 2 линейного асинхронного двигателя (фиг. 1) закреплен на неппдпиж- ном основании. Вторичным элементом чв- . ляется поворотная платформа 1. которая приводится в движение электромагнитной силой, преобразуемой индуктором 2 /Тля остановки поворотной платформы i предназначен-дисковый электромагнитный тормоз 5, который закреплен на неподвижном основании. Импульсный датчик 4 обратной связи, ось которого закреплен; моророг ной платформе 1, выдагт импуть-г.-. -. Г.тото
которых зависит от скорости вращения поворотной платформы.
Выходной сигнал (в виде прямоугольных импульсов) от импульсного датчика 4 поступает на вход блока 8 обработки сигнэ- ла обратной связи (фиг.2). Счетчик 18 выдает код местонахождения платформы Nn. который поступает на вход переключателя 9 режима работы.
Переключатель 9 режима работы пере- ключается от сигнала з/п. Сигнал з/п (запись-позиционирование) поступает от тумблера и переключателя вручную при переходе от записи дефектов на позиционирование их (или наоборот). Блок 9 содержит оперативные запоминающие устройства (ОЗУ), управляемые от сигнала з/п. Код скорости вращения платформы Nc вырабатывается при помощи логического элемента И 17, счетчиков 18, 19 и тактового генератора 20. Работу узла описывает фиг.5. Сигнал направления вращения xi определяется при помощи узла полярности, состоящего из инвертора 21 и триггера 22 (фиг.6).
Для записи параллельного кода место- нахождения дефектов контролируемого ШРЭ применено оперативное запоминающее устройство (ОЗУ) 10, которое работает соответственно по команде запись-позиционирование (з/п).
Формирователь адреса ячейки ОЗУ. находящийся в устройстве 10. показан на фиг.7 При записи координат дефектов на вход ОЗУ 36 запись/считывание подается логический уровень записи, на вход данных D-код позиции Nn - адресный вход А соединен с выходом счетчика 35, на вход С которого подается сигнал от одновибратора 39. Вход з/п устройства 10 соединен также с входом одновибратора 34, которые при пе- рехода режима работы з/п генерирует короткий импульс для установки логического О на всех выходах счетчика.
В режиме записи вращается платформа постоянно и код обнаруженных дефектов Nn записывается в ОЗУ. В режиме позиционирования из ОЗУ выдается код N3n местонахождения дефекта.
Коды выдаются или записываются по команде з/п. Последовательность записи кодов обеспечивается автоматически при обнаружении дефекта (сигнал ь). Последовательность выдачи кодов (нап ример. при дискретном режиме контроля) обсспечива- ется вручную или автоматически (от рентгеновской аппаратуры или от электропривода) срез сигнал tn. Код М3ч является задающим кодом положения, по которому управляется повороти п м 1,-пформа.
В узел 11 сравнения позиции код местонахождения дефекта Nan, код местонахождения платформы Nn и допускаемая ошибка позиционирования .n. В узле 11 вырабатываются код отклонения платформы по позиции AN и сигнал д . Сигнал д имеет уровень логической единицы, если дефект находится в заданном интервале положения ЛМдоп.п., ин.аче д имеет потенциал логического нуля.
На входы узла 12 сравнения скорости подаются коды отклонения по позиции ANn код задания скорости N3c и код обратной связи Nc. В узле 12 вырабатывается код отклонения скорости, который подается на первый вход переключателя 14 сигнала ско- рости.
На входы узла 13 сравнения опорной скорости подаются код обратной связи Nc и код задания опорной скорости N3.on.c- На выходе узла 13 вырабатывается код отклонения от опорной скорости ANon.c.. который подается на второй вход переключателя
14.
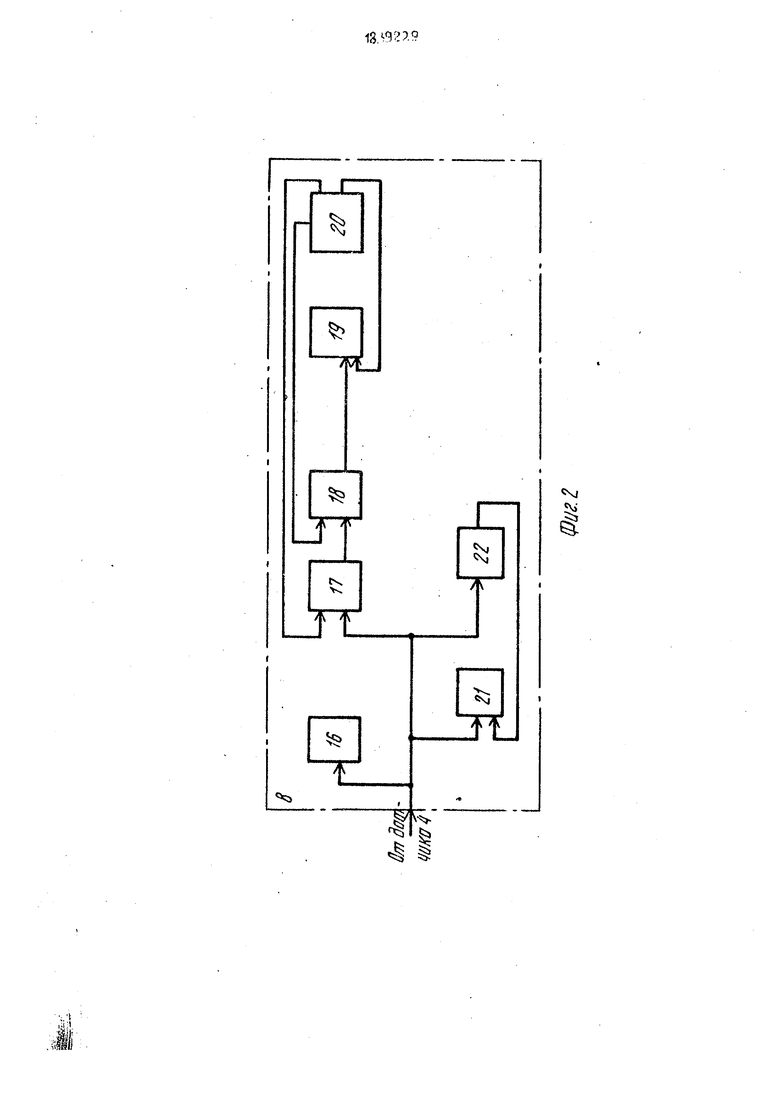
Переключатель 14 сигнала скорости (фиг.З) состоит из многовходовых логических элементов 23 и 24, на входы которых подаются соответственно сигналы Д Nc и ANon.c. На третий вход блока поступает сигнал д , на четвертый вход - сигнал xi. В режиме поиска дефектов и в режиме позиционирования, если ANn ANfl0n.n , через логический элемент ИЛИ 26 открывается элемент 23 и скорость вращения стабилизируется по сигналу отклонения ANC. В режиме позиционирования, когда дефект находится в заданной зоне. т.е. ANn Nflon.n. (сигнал 6 1), через логические элементы И 25, 26 выключается элемент И 23, включается элемент И 24 и скорость вращения стабилизируется по сигналу отклонения ДМдоп.с. На выходы элементов И 23 и 24 подключен логический элемент ИЛИ 25, с выхода которого на вход цифрового реверсивного, регулятора 15 напряжения подается код управления Nynp.
При выходе дефекта контролируемого шва из зоны позиционирования переключается триггер 29, меняется логический уровень сигнала Х2, реверсируется регулятор
15. т.е. направление вращения платформы. Меняется логический уровень сигнала х1, включается элемент И 24. Платформа вращается обратно со скоростью (поп.
Триггер 29 работает следующим образом. Бспи эффект не находится о заданном интервале, сигнал ня третьем входе пере ключателя 14 имоет уровень 0. При переходе сигнала ггот 0 гфимочаямый триг гор
переключается (справочник по интегральным микросхемам Б.В.Тэрабрин и др,2-ое изд., перераб.и доп.-М.: Энергия. 1981. с.388). При входе дефекта контролируемого шва из зоны позиционирования меняется логический уровень сигнала а от 1 до 0. триггер переключается и реверсируется регулятор 15 (фиг.1). Для обеспечения работы триггера 29 в данном режиме его входы I, k и S подключены к шине питания, а вход R соединен с выходом одновибрэтора 39. Такое включение входа R обеспечивает одинаковое начальное состояние перед каждым позиционированием дефекта.
Силовой элемент ИЛИ 28 предназначен для включения дискового электромагнитного тормоза 5 при попадании дефекта и зону позиционирования, т.е. при а 1.
Детектор 7 излучения через контролируемый объект оптически связан с. источни- ком б излучения. Выходной сигнал детектора подается на второй вход системы 32 измерения дефектов, на первый вход которого подается сигнал обратной соязи по скорости Nc. Выход системы измерения де- фектов соединен с входом измерительного счетчика 33 дефектов. Наличие дефекта показывает код на выходе счетчика 33. Измерительная часть устройства (блоки 6. 7. 33) построены аналогично прототипу (авт.со.№ 629448) за исключением того, что в цифровом компараторе 37 происходит сравнение кодов толщины детали г кодом Мдеф.э., который определяет допустимое отклонение толщины детали (например, начиная от Nfleij. 2: .з. начинается брак). При отклоиении толщины детали от дог-устпмо, о изменяется выход компаратора 37 и гюяр.чи- ется сигнал записи ь, который передается в элемент ИЛИ 38. Элемент 38 необходим для того, чтобы передать в одног-.-1 рэтор 39 также сигнал позиционирования in. Сигнал tn. получается в ручном режиме при помощи включения тумблера, а в автоматическом режиме - при дискретном контроля от включения и выключения электропривода платформы.
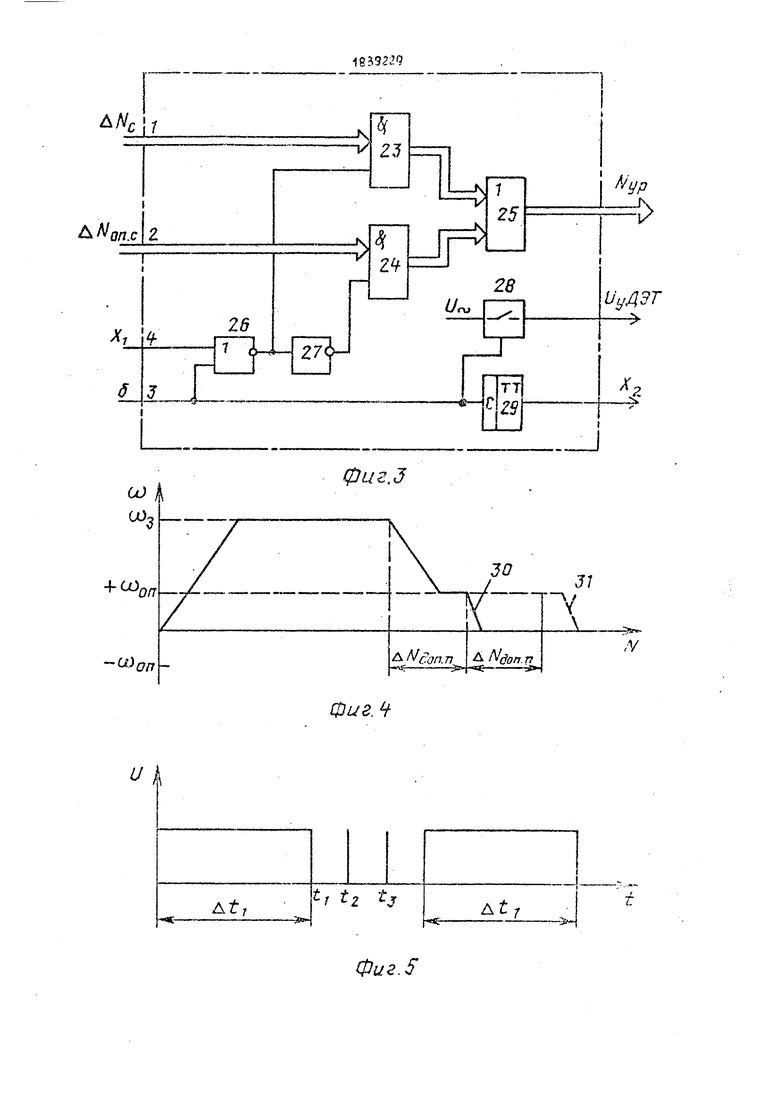
На фиг.4 изображен процесс позиционирования. При включении электропривода скорость вращения возрастает до скорости (ih. заданной кодом N3. При попадании дефекта в зону позиционирования ЛМдоп.п. включается опорная скорость . В пунк- те, заданном кодом М3п., выключаются индуктор 2 и включается тормоз 5. По зоне 30 производится остановка платформы. Зона 31 изображает случай, когда позиционированный дефект выходит за пределы зоны
ЛМдоп.П.
На фиг.5 изображена работа тактового генератора 20. В течение времени Л tt формируется код Nc на выходе счетчика 18 формирования кода скорости. В момент времени 12 код Мс передается на выход счетчика 19 хранения кода скорости. В момент времени ь возвращается счетчик 18 в исходное положение.
(56) Авторское свидетельство СССР № 629448, кл. G 01 В 15/02. 197.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дефектоскопического контроля планарных структур | 1987 |
|
SU1499195A1 |
| УСТРОЙСТВО АНАЛИЗА ПЕРЕКРЫТИЙ КАНАЛОВ ПРИ РАЗМЕЩЕНИИ ПАРАЛЛЕЛЬНЫХ ПОДПРОГРАММ В МНОГОПРОЦЕССОРНЫХ СИСТЕМАХ | 2011 |
|
RU2460126C1 |
| ЭЛЕКТРОННЫЙ ЗАМОК | 2002 |
|
RU2213191C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ДАННЫХ КОНТРОЛЯ ПО РАДИОКАНАЛУ | 2005 |
|
RU2280330C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2092903C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| Устройство для считывания изображений | 1983 |
|
SU1104554A1 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| Устройство сопряжения с магистралью последовательного интерфейса | 1983 |
|
SU1275417A1 |
| Устройство управления термопечатью | 1990 |
|
SU1719895A1 |
Формула изобретения
1, УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЛЩИНЫ СВАРНОГО ШВА. содержащее источник излучения, детектор излучения, систему измерения дефектов, измерительный счетчик дефектов и транспортную систему, отличающееся тем, что, с целью повышения производительности и эффективности контроля, оно дополнительно содержит импульсный датчик обратной связи, блок обработки сигнала обратной связи, переключатель режима работы, блок памяти, узел сравнения позиции, узел сравнения скорости, узел сравнения опорной скорости, переключатель сигнала скорости, цифровой реверсивный регулятор напряжения, триггер Шмитта, цифровой компаратор, элемент ИЛИ и однооибратор, транспортная система выполнена в виде поворотной платформы линейного асинхронного двигателя, дискового электромагнитного тормоза и подшипникового узла.
вертикальная ось поворотной платформы
... механически соединена с осью импульсного датчика обратной связи, а выход его соединен с входом блока обработки сигнала обратной связи, первый выход блока обработки сигнала обратной связи соединен с
-с информационным входом переключателя режима работы, второй вход которого является управляющим входом Запись - позиционирование, выход переключателя режима работы соединен с первым входом
50 блока памяти, второй вход соединен через триггер Шмитта с выходом детектора, третий вход является управляющим входом Запись - позиционирование, выход операционного запоминающего устройства
55соеДинен с первым входом узла срзрнения позиции, а второй вход узла сравнения позиции соединен с выходом переключателя режима работы, третий вход его предназначен для установки кода допускаемой погрешности позиционирования, первый
выход узла сравнения позиции соединен с
первым входом узла сравнения скорости, а дом тактового генератора, выходная шина второй выход его соединен с третьим вхо- счетчика формирования кода скорости сое- дом переключателя сигнала скорости и с динена с первым входом счетчика хране- третьим входом цифрового реверсивного 5 ния к°Да скорости, второй вход которого регулятора напряжения, на второй вход уз- соединен с третьим выходом тактового ге- ла сравнения скорости подается код зада- нераторэ, а выход инвертора соединен с ваемой скорости, а на третий вход его третьим входом триггера, подается код обратной связи по скорости,з. Устройство по п.1, отличающееся выход узла сравнения скорости соединен с 10 тем, что переключатель сигнала скорости первым входом переключателя сигнала состоит из многовходового логического скорости, при этом на первый вход узла элемента И основной регулируемой скоро- сравнения опорной скорости подается код сти, многовходового логического элемента обратной связи по скорости, а на второй И опорной скорости, многовходового логи- вход его подается код задаваемой опорной 15 ческого элемента ИЛИ, инвертора, сйлово- скорости, выход узла сравнения опорной го ключа и триггера, причем первый вход скорости соединен с вторым входом пере- многовходового логического элемента И ключэтеля сигнала скорости, а четвертый основной регулируемой скорости соединен вход переключателя сигнала скорости сое- с выходом узла сравнения скорости, вто- динен с третьим выходом блока обработки ™ рОИ ВХОд его соединен с выходом логиче- сигнала обратной связи, первый выход пе- ского элемента ИЛИ, а выход его - с реключателя сигнала скорости соединен с первым входом многовходоеого лсгичесхо- первым входом цифрового реверсивного го элемента ИЛИ, первый вход многовхо- регулятора напряжения, а второй выход дового логического элемента И опорной его соединен с вторым входом цифрового скорости соединен с выходом узла сравне- реверсивного регулятора напряжения, ния опорной скорости, второй вход его со- причем третий выход его соединен с дис- единен с выходом инвертора, а выход его ковым электромагнитным тормозом, выход соединен с вторым входом многовходового цифрового реверсивного регулятора , на- Q логического элемента ИЛИ, первый вход пряжения соединен с линейным асинхрон- логического элемента ИЛИ соединен с ным двигателем, при этом на вход третьим выходом блока обработки сигнала детектора излучения через контролируе- обратной связи, второй вход его соединен мый объект подается оптический сигнал от с вторым выходом узла сравнения пози- источника излучения, а выход детектора 35 Ции, а выход его соединен с вторым вхо- излучения соединен с вторым входом сие- дом многовходового логического элемента темы измерения дефектов, первый вход ко- И основной регулируемой скорости и вхо- торого соединен с вторым выходом блока дом инвертора, управляющий вход силово- обработки сигнала обратной связи, а вы- го ключа соединен с вторым выходом узла ход - с измерительным счетчиком дефек- 40 сравнения позиции, а вход триггера соеди- тов. нен с вторым выходом узла сравнения по2. Устройство по п,1, отличающееся зиции,
тем, что блок обработки сигнала обратной.4, Устройство по п.1, отличающееся связи состоит из счетчика кода позиции, тем, что блок памяти выполнен в виде one- логического элемента И, счетчика форми- 45ративного запоминающего устройства рования кода скорости, счетчика хранения (ОЗУ) счетчика, одновибратора и блока за- кода скорости, тактового генератора, ин-. дания адреса, счетный вход счетчика явля-, вертора и триггера, причем первый выход ется вторым входом блока памяти, вход импульсного датчика обратной связи сое- сброса соединен с выходом, одновибрато- динен с входом счетчика кода позиции, с 50ра, а выход - с адресным входом ОЗУ, вход первым входом логического элемента И, с данных ОЗУ является первым входом бло- входом инвертора и первым входом триг- ка памяти, а вход переключения режима гера, второй вход логического элемента И работы является управляющим входом соединен с первым выходом тактового ге- Запись - позиционирование блока пзмя- нератора, выход его - с первым входом 55 ти и соединен с входом одновибраторэ, гсчетчика формирования крда скорости, а выход блока задания адреса соединен с второй вход его соединен с вторым выхо- адресным входом ОЗУ.
г
л
|/|е.-гт
1
ZJ
/7
У d
J--sn- J
7/7,
ni)
frp l//)
У
i ™|
-™J Lr™ .1
E r.,.--,ИМ L / f-
л-1
л
-/74
х
W
J 2/,i Г|/ J--U
If/
I i- Л-
п
UCTV iiЈr& &&/
lЈ
С:
J
Ж
//
ч,
6г ХГШТ
//
fa
лг
/7/
иЗ
fi
у
//
1Јх7
У
(71 Г
/Г/1 I /7.л
IflO
сг
сп со
2
V
-5
u-uepflV
U.-UC3
/
Л.
.X
/r
Ј
Ъ 2г i
v
/W
(Wz/a
004Г
w
ЬСГ)
P9
бггб€8
фиг. 6
Фиг. 7