Предлагаемое изобретение относится к процессу регулировки и приемосдаточных испытаний навигационных приборов и устройств и, в частности, может быть использовано при регулировке и контроле положения осей чувствительности (ОЧ) маятниковых акселерометров (МА) автомата управления дальностью (АУД) относительно оси вращения программного механизма гироблоков (базовой оси БО) трехостного гиростабилизатора (ТГС).
Известен способ определения углового положения ОЧ МА относительно БО ТГС путем измерения выходного сигнала акселерометра в двух положениях ОЧ последнего, получаемых разворотом МА вместе с БО ТГС на фиксируемые углы относительно плоскости горизонта.
Известен также способ определения углового положения ОЧМА (Инерциальные системы управления, под ред. Питтмана, М., Воениздат, 1964 г., стр.80, 104, который взят за прототип относительно БО ТГС путем измерения выходного сигнала акселерометра в двух положениях ОЧ последнего.
К недостаткам известных способов относятся:
1. Необходимость высокоточного (с точностью не менее 1/3 допуска на точность выставки) разворота МА вместе с БО на фиксированные углы, требующая применения контрольного элемента углов разворота (оптической призмы, нуль-индикатора).
2. Погрешность взаимной привязки БО и контрольного элемента угла разворота целиком входит в погрешность определения углового положения ОЧ МА.
В связи с этим целью предлагаемого изобретения является увеличение точности определения неперпендикулярности ОЧ МА и БО ТГС.
Указанная цель достигается тем, что в известном способе, заключающемся в измерении выходного сигнала МА при различной ориентации его ОЧ относительно вертикали БО гиростабилизатора, устанавливают вертикально, измеряют выходной сигнал акселерометра в четырех положениях, получаемых разворотом акселерометра на 180° вокруг БО при двух противоположных направлениях последней.
На фиг.1 показано взаимное положение базовой оси и осей координат, связанных с подвижной частью МА (в плоскости, перпендикулярной оси подвеса маятника), для четырех положений, в которых производятся измерения выходного сигнала в соответствии с предлагаемым способом, где OZ - базовая ось ТГС; OX1 - ось подвеса МА; OY1 - ось чувствительности MA; OZ1 - ось, совпадающая с маятником МА.
Предлагаемый способ включает в себя следующие операции:
1. Вертикализацию БО ТГС.
2. Измерение выходного сигнала МА в I положении (фиг.1а).
3. Разворот МА на 180° вокруг БО ГГС.
4. Измерение выходного сигнала МА во II положении (фиг.1б).
5. Разворот МА вместе с БО ТГС на 180° вокруг горизонтальной оси.
6. Измерение выходного сигнала МА в III положении (фиг.1в).
7. Разворот МА на 180° вокруг БО ТГС.
8. Измерение выходного сигнала МА в IV положении (фиг.1г).
Уравнения моментов на оси ОХ1 подвеса МА для I и II положений имеют вид:

где  - значения тока обратной связи МА в I и II положениях соответственно;
- значения тока обратной связи МА в I и II положениях соответственно;
Kдм - коэффициент преобразования датчика момента МА;
Мп - паразитный момент на оси подвеса МА;
ml - маятниковость МА;
g - ускорение силы тяжести;
ψI; ψII - угол неперпендикулярности ОЧ МА к БО в I и II положениях;
ψ′ н.в - невертикальность БО при измерениях в I и II положениях.
Учитывая, что величина паразитных моментов на оси подвеса прецизионных МА стабильна в одном включении, принимаем
Мп I=Мп II=Мп
Уравнения (1) и (2) после преобразований можно привести к следующему виду


Так как значения угла неперпендикулярности ОЧ МА к БО в современных ТГС не должны превышать нескольких угл.мин, а выполнение вертикализации БО с точностью 5-10 угл.мин не представляет трудности, то алгебраическая сумма углов неперпендикулярности ОЧ МА к БО и невертикальности БО не превысит 15 угл.мин. Следовательно, функции sin, стоящие в левых частях выражений (3) и (4), можно заменить значениями соответствующих аргументов.
Производя замену и суммируя по частям выражения (3) и (4), получаем:

Таким образом, при определении величины угла неперпендикулярности ОЧ МА к БО из выражения (5) как  будет допущена погрешность, обусловленная наличием паразитных моментов на оси ОХ1.
будет допущена погрешность, обусловленная наличием паразитных моментов на оси ОХ1.
Для исключения погрешности в определении угла неперпендикулярности, вызываемой наличием паразитных моментов на оси подвеса МА, производятся измерения Ioc в III и IV положениях.
Уравнения моментов на оси OX1 подвеса MA для III и IV положений имеет вид:

где ψ''нв - невертикальность БО при измерениях в III и IV положениях.
После суммирования и преобразования с учетом малости угловых величин выражений (6) и (7) получаем:

Суммируя по частям выражения (5) и (8), получаем:

Величина угла неперпендикулярности ОЧ МА к БО определяется из (9) как среднее арифметическое слагаемых стоящих в левой части этого выражения
Коэффициент  определяется при калибровке МА, когда измеряется выходной сигнал при вертикальном положении ОЧ и горизонтальном положении оси подвеса МА (см., например, Инерциальные системы управления под ред. Питтмана, М., Воениздат, 1964 г., стр.90).
определяется при калибровке МА, когда измеряется выходной сигнал при вертикальном положении ОЧ и горизонтальном положении оси подвеса МА (см., например, Инерциальные системы управления под ред. Питтмана, М., Воениздат, 1964 г., стр.90).
В заключение оценим погрешность в определении ориентации ОЧ МА и БО от неточности разворота вокруг БО (оси. OZ) из I и III положений соответственно во II и IV.
Уравнения моментов на оси OX1 подвеса МА для II и IV положений с учетом неточности разворота (Δϕ1; Δϕ2) на 180° вокруг БО принимают вид:

После суммирования и преобразования уравнений (1), (2), (6), (12) получаем
Из сопоставления выражений (13) и (9) следует, что при определении взаимной ориентации ОЧ МА и БО в соответствии с (10) погрешность от неточности разворота на 180° вокруг БО имеет вид:

Задавшись конкретными значениями угловых величин ψ'н.в=ψ''н.в=60 угл.мин; ψII=ψIV=3 угл.мин и предельной величиной погрешности δψmax=1 угл.мин, получим, что максимальная Δϕ1(2) не должна превышать 14°.
Таким образом, предложенный способ по сравнению с известными позволяет увеличить точность определения угла неперпендикулярности ОЧ МА и БО ТГС и не предъявляет высоких требований к точности разворота МА вокруг БО и выставки БО и МА относительно вертикали.
Экспериментальная отработка методики, соответствующей предложенному способу, подтвердила ожидаемый положительный эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПЕРПЕНДИКУЛЯРНОСТИ ОСЕЙ ГИРОСТАБИЛИЗАТОРА | 1982 |
|
SU1839978A1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| СПОСОБ ВЫСТАВКИ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1972 |
|
SU1839886A1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ИЗМЕНЯЮЩИМСЯ ТОКАМ КОРРЕКЦИИ | 2012 |
|
RU2509979C1 |
| Способ автономного определения уходов платформы трехосного гиростабилизатора | 2018 |
|
RU2711572C1 |
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Способ исследования виброустойчивости маятникового акселерометра и устройство для его осуществления | 1987 |
|
SU1559295A1 |
| СПОСОБ РЕГУЛИРОВКИ ПАРАМЕТРОВ ПОПЛАВКОВОГО АКСЕЛЕРОМЕТРА С ФОТОЭЛЕКТРИЧЕСКИМ ДАТЧИКОМ УГЛА | 1978 |
|
SU1840669A1 |
Изобретение относится к области изготовления, регулировки и испытаний навигационных приборов и устройств и может быть использовано при регулировке и контроле положения осей чувствительности маятниковых акселерометров. Сущность: способ определения неперпендикулярности оси чувствительности маятникового акселерометра базовой оси трехосного гиростабилизатора осуществляется путем измерения выходных сигналов акселерометра при различных направлениях его оси чувствительности. При этом базовую ось гиростабилизатора устанавливают вертикально, а измерения производят в четырех положениях акселерометра. Указанные положения получают путем разворота акселерометра на 180° вокруг базовой оси гиростабилизатора при двух взаимно противоположных направлениях этой оси. Технический результат: повышение точности. 1 ил.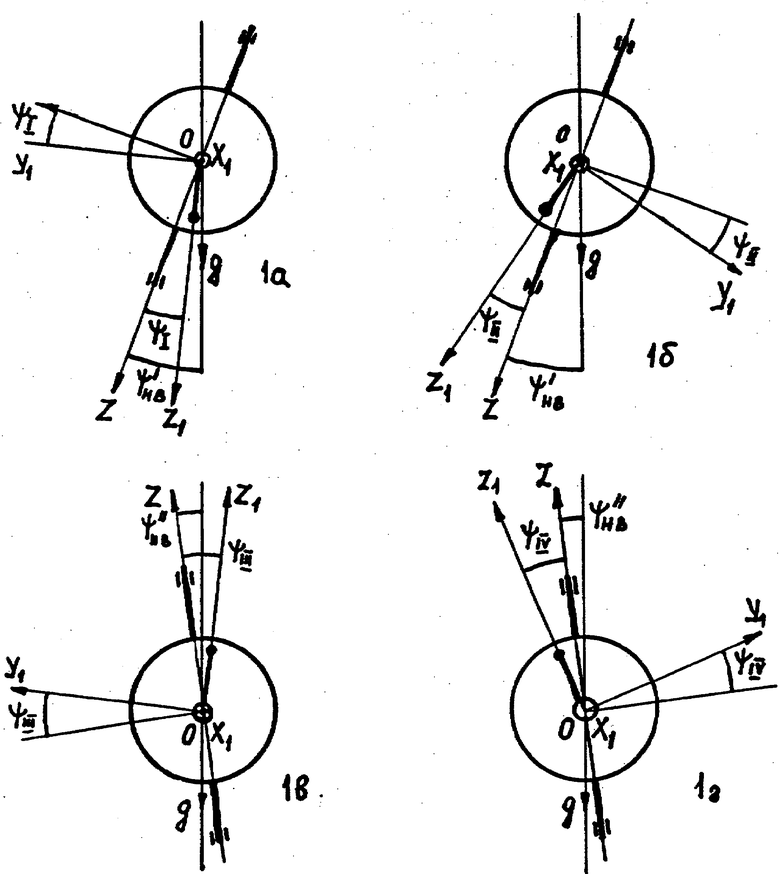
Способ определения неперпендикулярности оси чувствительности маятникового акселерометра базовой оси трехосного гиростабилизатора путем измерения выходных сигналов акселерометра при различных направлениях его оси чувствительности, отличающийся тем, что, с целью повышения точности, базовую ось гиростабилизатора устанавливают вертикально, а измерения производят в четырех положениях акселерометра, полученных разворотом его на 180° вокруг базовой оси гиростабилизатора при двух взаимно противоположных направлениях последней.
| Инерциальные системы управления, под ред | |||
| Питтмана | |||
| М., Воениздат, 1964, стр.80, 104. |

