Изобретение относится к области изготовления и контроля навигационных приборов и устройств, в частности, может быть применено при регулировке и контроле трехосных гиростабилизаторов (ГС).
Известны технические решения, позволяющие определить неперпендикулярность осей в гироскопических и навигационных устройствах, наиболее близкими к предложенному из которых являются способы, описанные в книгах: Гаврилов А.Н. Технология авиационного приборостроения. - Машиностроение, 1981 г., с.320-321 (аналог). Уразаев З.Ф., Фадеев А.М. Обработка сложных деталей приборов. - Машиностроение, 1966 г., с.134-135 (прототип).
Однако упомянутым техническим решениям, как аналогу, так и прототипу, присущи следующие недостатки.
1. Использование внешних измерительных средств (индикаторов).
2. Высокоточная вертикализация одной из контролируемых осей и штока индикатора.
3. Отсутствие возможности контроля в полностью изготовленных приборах со сложной кинематикой типа трехосных ГС.
4. Из схемы контроля исключены шарикоподшипниковые узлы опор карданова подвеса.
Перечисленные недостатки, ограничивая область применения известных технических решений этапом сборки ГС, обуславливают погрешность в определении фактической величины неперпендикулярности осей в изготовленном ГС, вызываемую методически не учитываемыми перекосами в шарикоподшипниковых узлах опор из-за деформаций узлов и рам при сборке карданова подвеса с одной стороны и разницей в вертикализации одной из контролируемых осей ГС и штока измерительного индикатора.
Таким образом, целью предлагаемого изобретения является увеличение точности определения неперпендикулярности осей ГС путем исключения вышеупомянутой погрешности.
Указанная цель в известном способе, заключающемся в том, что внешнюю ось гиростабилизатора вертикализируют, фиксируют положение внутренней оси относительно горизонта в двух положениях, различающихся разворотом на 180° вокруг внешней оси, достигается тем, что производят разворот на 180° вокруг внутренней оси, а ее положение фиксируют перед упомянутыми разворотами и после них.
При этом фиксация положения осей ГС может осуществляться по выходным сигналам чувствительных элементов, расположенных на стабилизированной платформе (СП) трехосного ГС, например по выходным сигналам акселерометров.
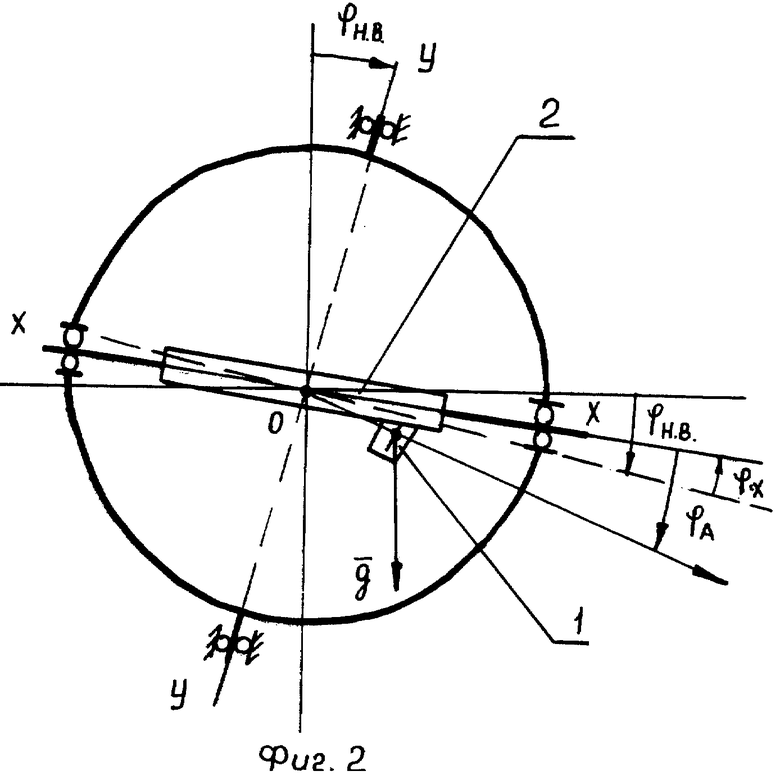
На фиг. 1 и 2 показано взаимное положение контролируемых осей ГС и маятникового акселерометра (1) (МА), расположенного на СП (2), для двух положений, в которых производится фиксация положения внутренней оси по выходному сигналу акселерометра, внутренняя ось ГС-ХХ, внешняя ось ГС-УУ, измерительная ось маятникового акселерометра OZ.
Предлагаемый способ включает в себя операции, выполняемые в следующей последовательности:
1) вертикализация внешней оси УУ,
2) измерение выходного сигнала МА (1) в I положении (фиг.1),
3) разворот вокруг внешней оси УУ на 180°,
4) разворот вокруг внутренней оси XX на 180°,
5) измерение выходного сигнала МА (1) во II положении (фиг.2).
Выражения для выходного сигнала МА - тока в датчике момента (ДМ) для I и II положений имеют вид
для I положения 
для II положения 
где ϕн.в - угол отклонения внешней оси ГС от вертикали,
ϕх - угловая величина неперпендикулярности осей ГС,
ϕА - угол между измерительной осью МА и внутренней осью ГС,
Мв - вредный момент на оси подвеса МА,
КА - коэффициент преобразования МА,
КДМ - коэффициент преобразования ДМ МА,
g - ускорение силы тяжести.
Учитывая возможность ограничения угловых величин в выражениях (1) и (2) несколькими десятками угловых минут, можно упростить эти выражения, заменив в них функции sin аргументами.
Ограничение угловых величин, входящих в выражения (1) и (2), обеспечивается, с одной стороны, жесткими допусками и малыми фактическими величинами неперпендикулярности осей в трехосных ГС, а с другой, принятием следующих дополнительных мер при реализации предложенного способа:
1) вертикализации внешней оси ГС с погрешностью, не превышающей 20 угловых минут, причем операция вертикализации в ТГС осуществляется автоматически в режиме приведения,
2) выбором акселерометра на СП трехосного ГС для фиксации положения внешней оси ГС таким образом, что измерительная ось параллельна внутренней оси ГС с допуском 10 угловых минут.
На основании вышеизложенного выражения тока в ДМ МА в I и II положениях принимают вид


После суммирования по частям выражений (4) и (3) и преобразования полученного выражения величина неперпендикулярности осей ГС определяется как
Второе слагаемое в правой части выражения (5), пропорциональное величине вредного момента, действующего вокруг оси подвеса МА, характеризует погрешность в определении величины неперпендикулярности осей при использовании предложенного способа.
Величина вредного момента в современных прецизионных МА, применяемых в ТГС, приведенная к величине тока обратной связи, не превышает 0,02-0,03 мкА, что дает погрешность в определении положения измерительной оси МА относительно горизонта - 2-3 угл.с. Последнее обстоятельство позволяет использовать для определения величины неперпендикудярности осей ГС выражение (5), пренебрегая величиной погрешности от вредного момента на оси подвеса МА, т.е. 
Сопоставление предложенного технического решения с базовым объектом - способом определения неперпендикулярности осей ГС, применяемым в производстве в настоящее время (см. Гаврилов А.Н. Технология авиационного приборостроения, 1981 г., с.320-321), выявляет следующие преимущества заявленного способа над используемым.
1. Область применения предложенного способа распространяется на изготовленные ГС.
2. Исключение из схемы определения неперпендикулярности осей внешних измерительных средств.
3. Возможность полной автоматизации процесса определения неперпендикулярности.
4. Повышение точности определения неперпендикулярности осей.
Таким образом, предложенный способ по сравнению с известными техническими решениями позволяет увеличить точность определения неперпендикулярности осей и расширить область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПЕРПЕНДИКУЛЯРНОСТИ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839863A1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| СПОСОБ ПОДГОТОВКИ КОНТРОЛЬНОЙ ПЛОЩАДКИ ДЛЯ СОГЛАСОВАНИЯ АГРЕГАТОВ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ АРТУСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572178C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
Изобретение относится к области изготовления и контроля навигационных приборов и устройств, в частности, может быть применено при регулировке и контроле трехосных гиростабилизаторов. Сущность: для осуществления способа устанавливают гиростабилизатор таким образом, чтобы ось внешней рамы его подвеса была вертикальна. Измеряют угол между стабилизированной площадкой с установленным на ней маятниковым акселерометром и плоскостью горизонта в этом положении. Разворачивают стабилизированную площадку с установленным на ней акселерометром на 180° вокруг оси внешней рамы. Кроме того, стабилизированную площадку разворачивают на 180° вокруг оси внутренней рамы подвеса. После разворотов снова измеряют угол между стабилизированной площадкой и плоскостью горизонта. Технический результат: повышение точности. 2 ил.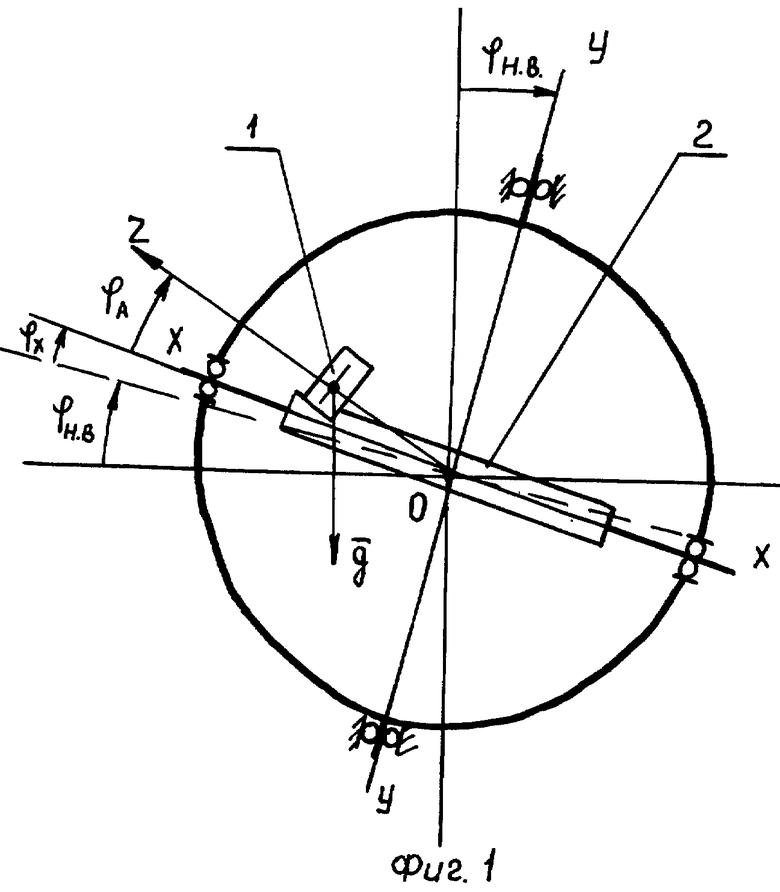
Способ определения неперпендикулярности осей гиростабилизатора, включающий установку гиростабилизатора с ориентацией оси внешней рамы его подвеса вертикально, измерение угла между стабилизированной площадкой с установленным на ней маятниковым акселерометром и плоскостью горизонта в этом положении стабилизированной площадки с установленным на ней маятниковым акселерометром и после разворота ее на 180° вокруг оси внешней рамы подвеса, отличающийся тем, что, с целью повышения точности, дополнительно разворачивают стабилизированную площадку с установленным на ней маятниковым акселерометром на 180° вокруг оси внутренней рамы подвеса и измеряют угол между стабилизированной площадкой и плоскостью горизонта до и после дополнительно разворота.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гаврилов А.Н | |||
| Технология авиационного приборостроения | |||
| - М.: Машиностроение, 1981, с.320-321 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Уразаев З.Ф | |||
| и Фадеев А.М | |||
| Обработка сложных деталей приборов | |||
| - М.: Машиностроение, 1966, с.134-135. | |||

