мый параметр. Устройство, реализующее способ,содержит вилку 4 и рамку 5, последняя выполнена сложной формы.
Внешняя поверхность рамки 5 образована сферой, усеченной плоскостями 11. 2 с. и 1 з.п. ф-лы, 6 ил.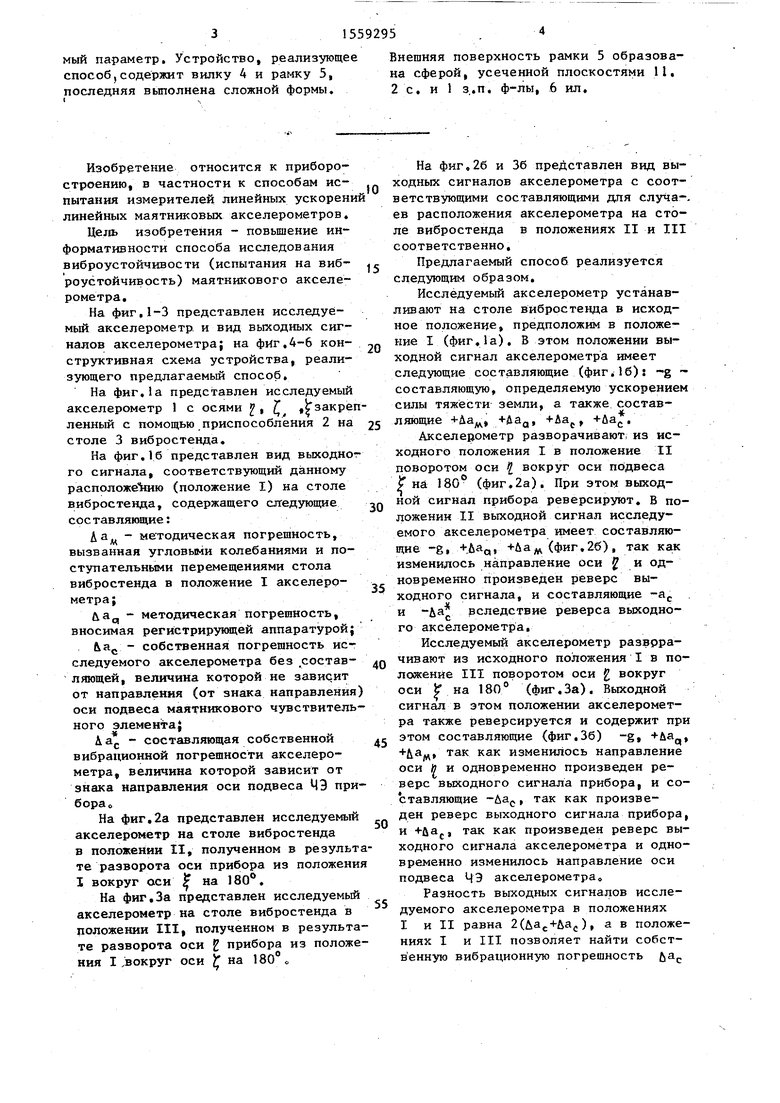

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования виброустойчивостиАКСЕлЕРОМЕТРА | 1978 |
|
SU845103A1 |
| Способ исследования виброустойчивости акселерометра | 1974 |
|
SU528510A1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ | 2019 |
|
RU2729175C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДОПОЛНИТЕЛЬНОЙ НЕЛИНЕЙНОСТИ МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЛИНЕЙНОГО УСКОРЕНИЯ ПРИ ИСПЫТАНИИ НА ВИБРОУСТОЙЧИВОСТЬ | 2014 |
|
RU2586262C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2012 |
|
RU2504735C1 |
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| МАЯТНИКОВЫЙ НИЗКОЧАСТОТНЫЙ ВИБРОСТЕНД | 2012 |
|
RU2515353C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |


Изобретение относится к приборостроению, в частности к способам испытания измерителей линейных ускорений. Способ исследования виброустойчивости маятникового акселерометра, заключающийся в задании виброускорения и регистрации выходных сигналов с акселерометра, установленного на столе вибростенда в исходном положении, и в развернутом первом положении, полученном из исходного поворотом измерительной оси акселерометра на 180° вокруг оси подвеса маятникового чувствительного элемента, с реверсом выходного сигнала акселерометра в процессе разворота, и развернутом втором положении, полученном из исходного поворотом измерительной оси акселерометра на 180° вокруг оси, направленной вдоль маятника чувствительного элемента, с реверсом выходного сигнала акселерометра в процессе разворота. Вычисляют первый искомый параметр по разности зарегистрированных сигналов в исходном положении и в первом развернутом положении акселерометра. Вычисляют второй искомый параметр по разности зарегистрированных сигналов в исходном положении и во втором развернутом положении акселерометра. А по разности первого и второго искомых параметров вычисляют искомый параметр. Устройство, реализующее способ содержит вилку 4 и рамку 5, последняя выполнена сложной формы. Внешняя поверхность рамки 5 образована сферой, усеченной плоскостями 11. 2 с.п.ф-лы, 1 з.п.ф-лы,6 ил.
Изобретение относится к приборостроению, в частности к способам испытания измерителей линейных ускорени линейных маятниковых акселерометров.
Цель изобретения - повышение информативности способа исследования виброустойчивости (испытания на виб- роустойчивость) маятникового акселерометра.
На фиг,1-3 представлен исследуемый акселерометр и вид выходных сигналов акселерометра; на фиг,4-6 кон- структивная схема устройства, реализующего предлагаемый способ.
На фиг.а представлен исследуемый акселерометр 1 с осями Ј, Ј ,Ьзакрепленный с помощью приспособления 2 на столе 3 вибростенда.
На фиг.16 представлен вид выходного сигнала, соответствующий данному расположению (положение I) на столе вибростенда, содержащего следующие сое тавляющие:
Дам - методическая погрешность, вызванная угловыми колебаниями и поступательными перемещениями стола вибростенда в положение I акселерометра;
йа - методическая погрешность, вносимая регистрирующей аппаратурой;
&ас - собственная погрешность исследуемого акселерометра без .состав- ляющей, величина которой не зависит от направления (от знака направления оси подвеса маятникового чувствительного элемента
V
А ас - составляющая собственной вибрационной погрешности акселерометра, величина которой зависит от знака направления оси подвеса ЧЭ прибора о
На фиг.2а представлен исследуемый акселерометр на столе вибростенда в положении II, полученном в результте разворота оси прибора из положени I вокруг оси Ј на 180°.
На фиг.За представлен исследуемый акселерометр на столе вибростенда в положении III, полученном в результате разворота оси {J прибора из положения I ,вокруг оси Ј на 180°о
0
п
5
п
Q
5
0
5
На фиг,26 и 36 представлен вид выходных сигналов акселерометра с соответствующими составляющими для случа-. ев расположения акселерометра на столе вибростенда в положениях II и III соответственно,
Предлагаемый способ реализуется следующим образом.
Исследуемый акселерометр устанавливают на столе вибростенда в исходное положение, предположим в положение I (фиг.1а). В этом положении выходной сигнал акселерометра имеет следующие составляющие (фиг.16): -g - составляющую, определяемую ускорением силы тяжести земли, а также составляющие +Дам, +Aaa, +Aac, +йа.
Акселерометр разворачивают; из исходного положения I в положение II поворотом оси Ј вокруг оси подвеса Ј на 180 (фиг.2а). При этом выходной сигнал прибора реверсируют. В положении II выходной сигнал исследуемого акселерометра имеет составляющие -g, +.&АСИ +&ам (фиг, 26), так как изменилось направление оси Ч и одновременно произведен реверс выходного сигнала, и составляющие -ас и Ла« вследствие реверса выходного акселерометра.
Исследуемый акселерометр разврра- чивают из исходного положения I в положение III поворотом оси Ч вокруг оси Ј на 180° (фиг.За). Выходной сигнал в этом положении акселерометра также реверсируется и содержит при этом составляющие (фиг,36) -g, +&a , +&ajvi так как изменилось направление оси и и одновременно произведен реверс выходного сигнала прибора, и составляющие -Дас, так как произведен реверс выходного сигнала прибора, и +йас, так как произведен реверс выходного сигнала акселерометра и одновременно изменилось направление оси подвеса ЧЭ акселерометра.
Разность выходных сигналов исследуемого акселерометра в положениях I и II равна 2(Дас+&ас), а в положениях I и III позволяет найти собственную вибрационную погрешность fcac
исследуемого акселерометра, а вычитание полученных разностей -2(Ла,+Ап
vС
и 2&а„ - составляющую Да. собстс
венной вибрационной погрешности прибора.
Цель изобретения - повышение информативности способа.
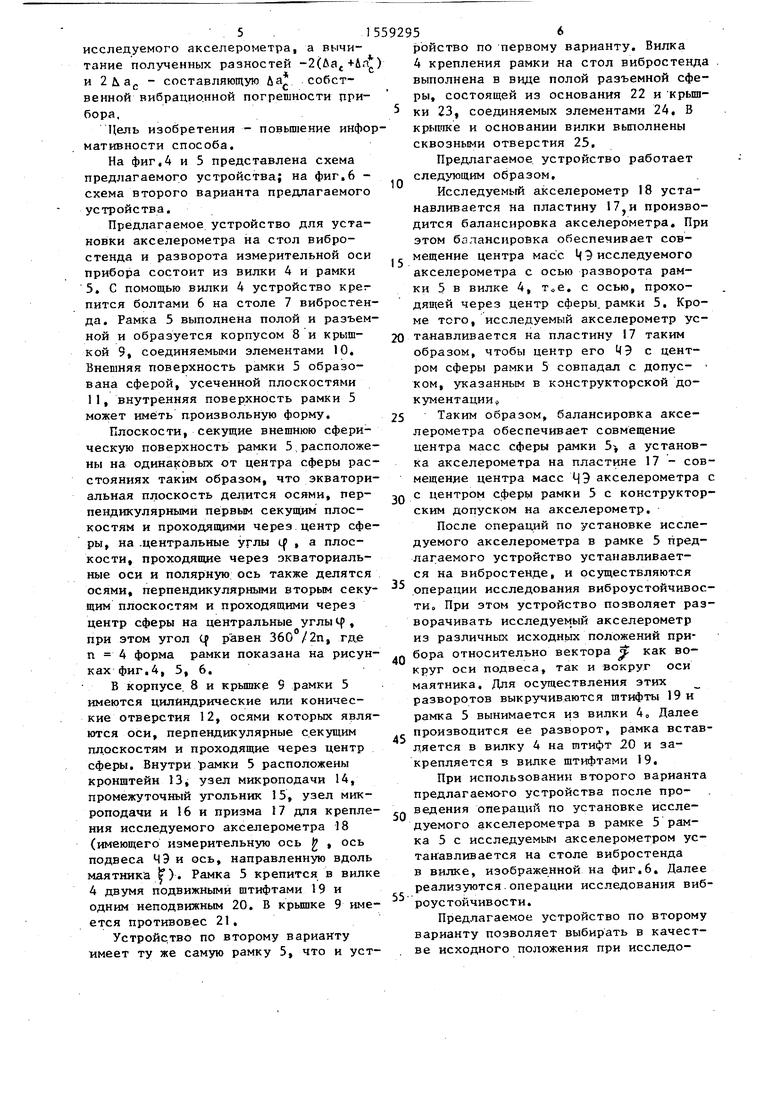
На фиг.4 и 5 представлена схема предлагаемого устройства; на фиг.6 - схема второго варианта предлагаемого устройства.
Предлагаемое устройство для установки акселерометра на стол вибростенда и разворота измерительной оси прибора состоит из вилки 4 и рамки 5 С помощью вилки 4 устройство крег пится болтами 6 на столе 7 вибростенда. Рамка 5 выполнена полой и разъемной и образуется корпусом 8 и крышкой 9, соединяемыми элементами 10. Внешняя поверхность рамки 5 образована сферой, усеченной плоскостями 11, внутренняя поверхность рамки 5 может иметь произвольную форму.
Плоскости, секущие внешнюю сферическую поверхность рамки 5 расположены на одинаковых от центра сферы расстояниях таким образом, что экваториальная плоскость делится осями, перпендикулярными первым секущим плоскостям и проходящими через центр сферы, на центральные углы cf , а плоскости, проходящие через экваториальные оси и полярную ось также делятся осями, перпендикулярными вторым секущим плоскостям и проходящими через центр сферы на центральные углы Ц , при этом угол (f равен 360 /2п, где п 4 форма рамки показана на рисунках фиг.4, 5, 6.
В корпусе 8 и крышке 9 рамки 5 имеются цилиндрические или конические отверстия 12, осями которых являются оси, перпендикулярные секущим плоскостям и проходящие через центр сферы. Внутри 1эамки 5 расположены кронштейн 13, узел микроподачи 14, промежуточный угольник 15, узел микроподачи и 16 и призма 17 для крепления исследуемого акселерометра 18 (имеющего измерительную ось g , ось подвеса ЧЭ и ось, направленную вдоль маятника ). Рамка 5 крепится в вилке 4 двумя подвижными штифтами 19 и одним неподвижным 20. В крышке 9 имеется противовес 21,
Устройство по второму варианту имеет ту же самую рамку 5, что и уст0
5
0
5
0
5
0
5
0
5
ройство по первому варианту. Вилка 4 крепления рамки на стол вибростенда выполнена в виде полой разъемной сферы, состоящей из основания 22 и крышки 23, соединяемых элементами 24. В крыстке и основании вилки выполнены сквозными отверстия 25.
Предлагаемое устройство работает следующим образом.
Исследуемый акселерометр 18 устанавливается на пластину 177и производится балансировка акселерометра. При этом бапансировка обеспечивает совмещение центра масс ЦЭ исследуемого акселерометра с осью разворота рамки 5 в вилке 4, т0е. с осью, проходящей через центр сферы рамки 5. Кроме того, исследуемый акселерометр устанавливается на пластину 17 таким образом, чтобы центр его Ч с центром сферы рамки 5 совпадал с допуском, указанным в конструкторской документации,
Таким образом, балансировка акселерометра обеспечивает совмещение центра масс сферы рамки 5 а установка акселерометра на пластине 17 - совмещение центра масс ЦЭ акселерометра с с центром сферы рамки 5 с конструкторским допуском на акселерометр.
После операций по установке исследуемого акселерометра в рамке 5 предлагаемого устройство устанавливается на вибростенце, и осуществляются операции исследования виброустойчивос- ти„ При этом устройство позволяет разворачивать исследуемый акселерометр из различных исходных положений прибора относительно вектора jjf как вокруг оси подвеса, так и вокруг оси маятника. Для осуществления этих разворотов выкручиваются штифты 19 и рамка 5 вынимается из вилки 4„ Далее производится ее разворот, рамка вставляется в вилку 4 на штифт 20 и закрепляется в вилке штифтами 19.
При использовании второго варианта предлагаемого устройства после проведения операций по установке исследуемого акселерометра в рамке 5 рамка 5 с исследуемым акселерометром устанавливается на столе вибростенда в вилке, изображенной на фиг.6. Далее реализуются операции исследования виброустойчивости.
Предпагаемое устройство по второму варианту позволяет выбирать в качестве исходного положения при исследо71559295
инии виброустойчивости любое произ- ольное положение исследуемого акселеометра относительно вектора g.
м п ак по ос но ос ч ти с за ра ко ра н од ры сф у д и пл а о щ ц у п к я щ ц
Формула изобретения
180е
вокруг оси подвеса маятникового чувствительного элемента, реверсируют выходной сигнал акселерометра в процессе разворота, далее определяют собственную вибрационную погрешность прибора по разности зарегистрированных сигналов, отличающий -
формативности за счет выделения составляющей собственной вибрационной погрешности, зависящей от ориентации оси подвеса, после определения собственной вибрационной погрешности задают виброускорение и регистрируют выходные сигналы с акселерометра, установленного на столе вибростенда в исходном положении и в развернутом, полученном из исходного поворотом измерительной оси акселерометра на 180° вокруг оси, направленной вдоль маятника чувствительного элемента, реверсируют выходной сигнал и по измеренным величинам определяют составляющую собственной вибрационной погреш- ности, зависящей от ориентации оси подвеса.
8
0
5
0
5
.Q
0
35
метра, содержащее вилку и рамку с призмой для крепления исследуемого акселерометра и узлом микропоцачи по двум взаимно перпендикулярным осям, закрепленную в вилке с возможностью разворота вокруг фиксированной оси, отличающееся тем, что, с целью повышения информативности, за выделения составляющей собственной вибрационной погрешности, зависящей от ориентации оси подвеса, рамка выполнена в виде корпуса с крышкой, при этом внешняя поверхность рамки выполнена в виде сферы, усеченной плоскостями, расположенными на одинаковых расстояниях от центра сферы, причем экваториальная плоскость сферы делится на равные центральные углы ц экваториальными осями, перпендикулярными первым секущим плоскостям и проходящими через центр сферы, а плоскости, проходящие через экваториальные оси и полярную ось, делятся осями, перпендикулярными вторым секущим плоскостям и проходящими через центр сферы, на равные центральные углы tf , в корпусе и крышке рамки выполнены сквозные цилиндрические или конические отверстия, осями которых являются оси, перпендикулярные секущим плоскостям и проходящие через центр сферы, а центральный угол
ср 360°/2п, где п 2,3,4,..,
afcx
т
Ж
5а,
&лс
L
6ал Да„
-1
а
ut
И abtx О
jta
tec f
Adi
Да.
W
3
Фие.2
Фиг.З
Я
W
23
Составитель Т.Макарова Редактор Н.Данко Техред- А.КравчукКорректор Н,Король
Заказ 835
Тираж 441
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
/2
23
24
фие.В
Подписное
| Способ исследования виброустойчивости акселерометра | 1974 |
|
SU528510A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коновалов С.Ф, и др„ Измерение вибрационных погрешностей линейных маятниковых акселерометров на стенде угловой вибрации | |||
| - Известия ВУЗов, Приборостроение, 1987, , с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
