Изобретение относится к области инерциальной навигации и может быть использовано при определении угловой ориентации движущихся объектов.
Известны бескардановые инерциальные системы угловой ориентации, состоящие из трех измерителей угловой скорости, оси чувствительности которых образуют ортогональный трехгранник, неподвижный относительно осей объекта, и бортовой вычислительной машины, в которой по информации от измерителей угловой скорости математически моделируется угловое движение объекта (см. книгу М.И.Захарина, Ф.М.Захарина "Кинематика инерциальных систем навигации", Машиностроение, 1968, стр.173).
Наличие собственных уходов измерителей угловой скорости (ИУС) при достаточно высокой стабильности этих уходов в одном запуске приводит к накапливающейся со временем погрешности определения угловой ориентации объекта указанными бескардановыми инерциальными системами.
Целью настоящего изобретения является повышение точности определения ориентации объекта бескардановой инерциальной системой.
Поставленная цель достигается тем, что в состав бескардановой инерциальной системы введен четвертый измеритель угловой скорости, выход которого соединен с входом бортовой вычислительной машины, при этом первый и четвертый измерители угловой скорости установлены в одноосные поворотные механизмы с осями поворотов, параллельными осям чувствительности второго и третьего измерителей угловой скорости соответственно, позволяющие поворачивать и фиксировать оси чувствительности первого и четвертого ИУС параллельно, перпендикулярно и антипараллельно осям чувствительности третьего и второго измерителей угловой скорости соответственно, а управляющие входы поворотных механизмов соединены с управляющими выходами бортовой вычислительной машины.
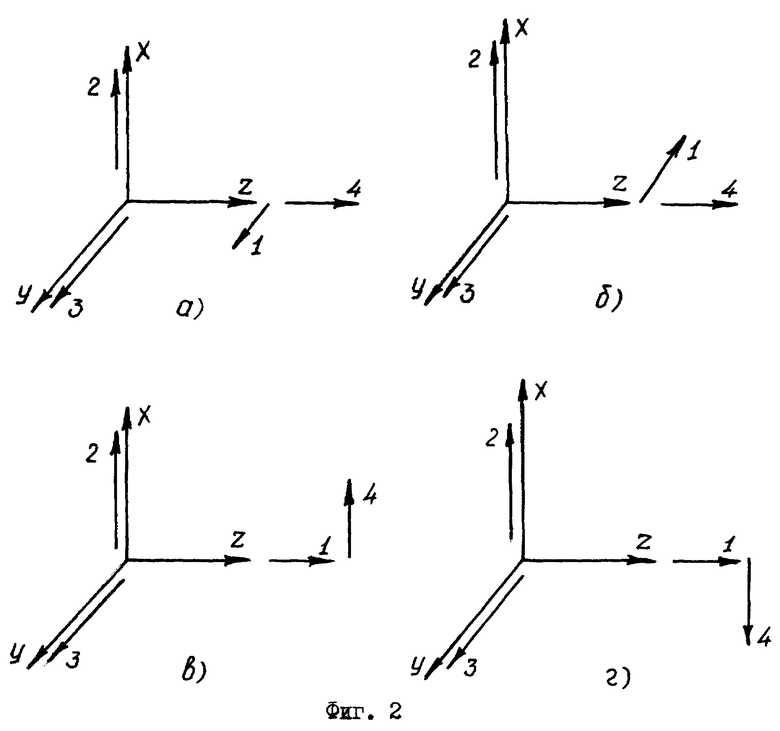
На фиг.1 представлена блок-схема бескардановой инерциальной системы.
Бескардановая инерциальная система содержит четыре измерителя угловой скорости 1, 2, 3 и 4, два из которых 1 и 4, установлены в одноосные поворотные механизмы 5 и 6 соответственно, и бортовую вычислительную машину 7.
Функционирование бескардановой инерциальной системы приводится на примере определения ориентации объекта в условиях, когда систематические составляющие скоростей уходов ИУС не меняются со временем.
Обозначим через ωx, ωy, ωz - проекции абсолютной угловой скорости объекта на оси правой ортогональной системы координат XYZ, оси X и Y которой совпадают с осями чувствительности измерителей угловой скорости 2 и 3 соответственно. Пусть τ1, τ2, τ3 и τ4 - систематические значения скоростей уходов, а d1(t), d2(t), d3(t) и d4(t) - значения выходных сигналов в момент времени t измерителей угловой скорости 1, 2, 3 и 4 соответственно.
В исходном положении оси чувствительности измерителей угловой скорости 2, 3 и 4 направлены по осям Х, Y и Z соответственно (см. фиг.2 а) и ориентация объекта определяется в бортовой вычислительной машине 7 по информации, поступающей от этих ИУС. Ось чувствительности ИУС1 параллельна оси чувствительности ИУС3 и на момент времени t1, в бортовой вычислительной машине определяется разность (А) показаний измерителей угловой скорости 1 и 3

По сигналу бортовой вычислительной машины поворотный механизм 5 поворачивает и фиксирует ось чувствительности ИУС1 антипараллельно оси Y (см. фиг.2 б), и в бортовой вычислительной машине определяется сумма показаний (В) ИУС1 и 3, в момент времени t2

Далее поворотный механизм 5 по сигналу бортовой вычислительной машины поворачивает и фиксирует ось чувствительности ИУС 1 параллельно оси Z, и вычислительная машина определяет ориентацию объекта по информации, поступающей от измерителей угловой скорости 1, 2, 3.
Затем по сигналу бортовой вычислительной машины поворотный механизм 6 поворачивает и фиксирует ось чувствительности ИУС 4 параллельно оси Х (см. фиг.2 в), при этом в бортовой вычислительной машине определяется разность показаний (С) измерителей угловой скорости 2 и 4 на момент времени t3

После этого поворотный механизм 6 устанавливает ось чувствительности ИУС 4 антипараллельно оси Х (см. фиг.2 г) и бортовая вычислительная машина вычисляет сумму показаний (Д) измерителей угловой скорости 2 и 4 на момент времени t4

По величинам А, В, С и Д бортовая вычислительная машина 7 вычисляет систематические значения скоростей уходов измерителей угловой скорости 1, 2, 3 и 4 по формулам
Предлагаемое устройство позволяет с точностью до случайных составляющих скоростей уходов исключить влияние систематических составляющих уходов измерителей угловой скорости на точность определения ориентации объекта бескардановой инерциальной системой.
Следует отметить, что выявление систематических составляющих уходов измерителей угловой скорости происходит в режиме определения бескардановой инерциальной системой угловой ориентации объекта.
Изобретение относится к области инерциальной навигации и может быть использовано при определении угловой ориентации движущихся объектов. Сущность: система содержит три измерителя угловой скорости с взаимно ортогональными осями чувствительности и бортовую вычислительную машину, входы которой связаны с измерителями угловой скорости. Кроме того, в нее введен четвертый измеритель угловой скорости, выход которого соединен с входом бортовой вычислительной машины. Первый и четвертый измерители угловой скорости установлены в одноосные поворотные механизмы с осями поворотов, параллельными осям чувствительности второго и третьего измерителей угловой скорости. Входы поворотных механизмов соединены с выходами бортовой вычислительной машины. Технический результат: повышение точности определения ориентации объекта бескардановой инерциальной системой. 2 ил.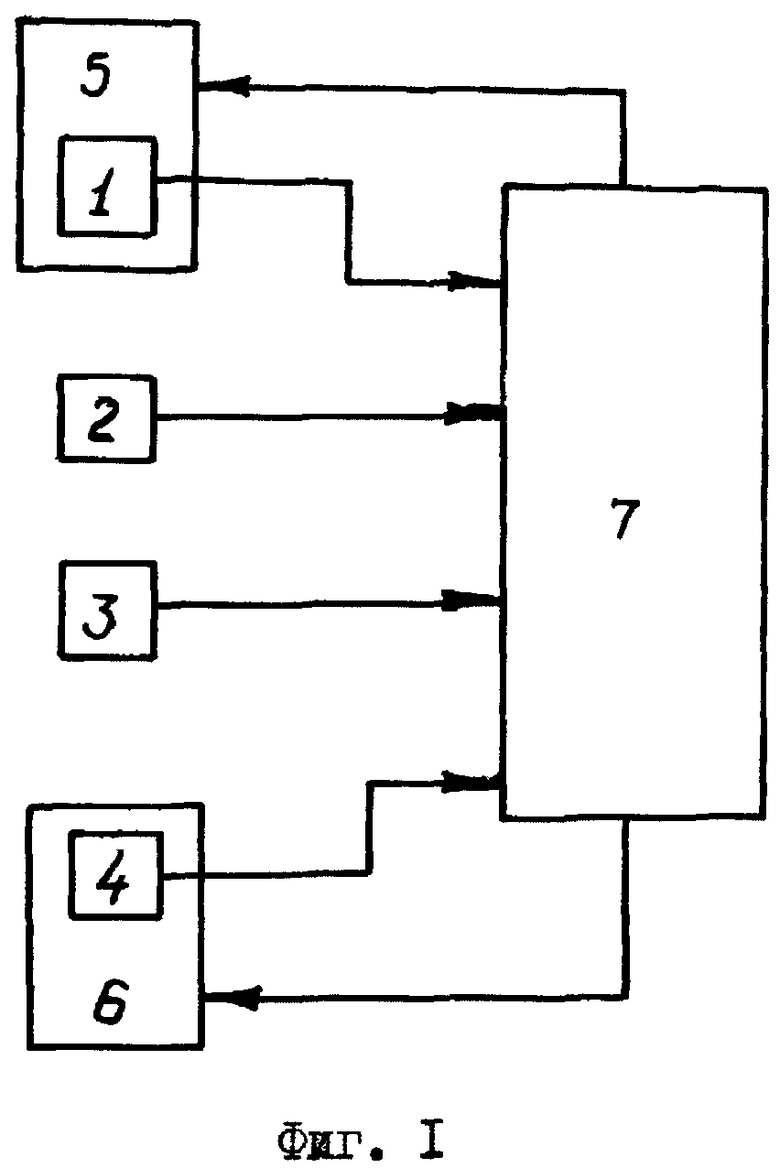
Бескардановая инерциальная система угловой ориентации, содержащая три измерителя угловой скорости с взаимно ортогональными осями чувствительности и бортовую вычислительную машину, входы которой связаны с измерителями угловой скорости, отличающаяся тем, что, с целью повышения точности определения ориентации объекта бескардановой инерциальной системой, в нее введен четвертый измеритель угловой скорости, выход которого соединен с входом бортовой вычислительной машины, первый и четвертый измерители угловой скорости уставлены в одноосные поворотные механизмы с осями поворотов, параллельными осям чувствительности второго и третьего измерителей угловой скорости, а входы поворотных механизмов соединены с выходами бортовой вычислительной машины.
| Захарин М.И., 3ахарин Ф.М | |||
| Кинематика инерциальных систем навигации, М.: Машиностроение, 1968, стр.173. |

