Изобретение относится к системам обработки радиосигналов в приемопередающих станциях, излучающих и принимающих отраженные от движущихся воздушных источников гармонические сигналы в режиме фазовой манипуляции по коду Баркера. Каждый период фазовой манипуляции соответствует определенному элементу разрешения дальности. Если в пространственном элементе разрешения дальности находятся несколько движущихся источников отражения, то в периоде фазовой манипуляции на фоне шума приходят гармонические сигналы с доплеровскими сдвигами частоты.
При обработке принятых сигналов в частотной области определяют доплеровские сдвиги частоты (доплеровские частоты) движущихся источников отражения и путем сравнения амплитуд спектральных составляющих на доплеровских частотах с порогом обнаружения фиксируют частоты, принадлежащие источникам [1, 2]. При наличии многоканальной обработки находят координаты источников методом разности фаз.
Однако возникают ситуации, приводящие к ошибкам обнаружения источников в частотной области. Так, если отраженные сигналы от нескольких источников приходят в разные моменты времени, но имеют одинаковую доплеровскую частоту (одинаковую радиальную проекцию вектора скорости), то в частотной области источники не разрешаются по доплеровской частоте и обнаруживаются как один источник. При этом способ [2] при оценивании координат в частотной области дает ложные пространственные координаты.
Известен способ [3] обработки сигналов, позволяющий обнаруживать момент времени прихода сигнала от источника и определять его координаты во временной области, рассчитанный на наличие сигнала только от одного источника. Принципиально способ [3] позволяет обнаруживать последовательно во времени появление сигналов от нескольких источников и определять их число. Однако не может находить координаты всех источников.
При соединении и улучшении способов [2] и [3] можно добиться обнаружения нескольких источников в элементе разрешения дальности с определением их координат. При этом возможно обнаруживать частоты, на которых источники не различимы по доплеровской частоте, и осуществлять сверхразрешение при наличии двух источников - определять координаты источников, обнаруженных на одной частоте.
Рассмотрим в качестве прототипа способ [2], который применим как к нескольким наземным, так и нескольким воздушным источникам отражения. Он сводится к следующим основным операциям в частотной области.
1. Сигналы, принимаемые в элементах антенной решетки (АР), селектируют в нескольких приемных каналах по элементам разрешения дальности.
2. В каждом элементе дальности сигналы преобразуют во временные последовательности, которые подвергают дискретному преобразованию Фурье (ДПФ) в каждом q-м приемном канале ( Q - число приемных каналов по числу элементов АР). В результате образуют Q частотных последовательностей в спектре доплеровских частот.
Q - число приемных каналов по числу элементов АР). В результате образуют Q частотных последовательностей в спектре доплеровских частот.
3. В частотных последовательностях выбирают те частоты, на которых амплитуды спектральных составляющих превышают порог обнаружения полезных сигналов во всех Q каналах.
4. У выделенных в Q каналах спектральных составляющих берут фазы и методом разности фаз находят пространственные координаты источников.
Данный способ обладает недостатком - при наличии двух или более источников в одном элементе разрешения дальности, движущихся с одинаковыми радиальными проекциями скоростей и имеющими соответственно одинаковые сдвиги доплеровской частоты, способ не различает источники и дает ложные пространственные координаты.
Техническое решение направлено на устранение этого недостатка, а именно, на совместную частотно-временную обработку принимаемых сигналов с целью обнаружения и определения координат нескольких источников, выявления возможных ошибок обнаружения и сверхразрешение в случае наличия двух источников.
Технический результат предлагаемого технического решения достигается применением способа частотно-временной обработки сигналов, который заключается в приеме сигналов от движущихся источников отражения в элементе разрешения дальности, преобразовании сигналов во временные последовательности в приемных каналах, переводе временных последовательностей в частотные последовательности в спектре доплеровских частот и отличается тем, что принимают гармонические сигналы в режиме фазовой манипуляции по коду Баркера, подвергают последовательности временных отсчетов сигналов операциям фильтрации, вычисляют отклонения последовательностей от отфильтрованных значений и, если отклонения не попадают в доверительные интервалы, то фиксируют моменты времени τk появления k-х сигналов от источников (k=1,2,…,m, m - оценка числа источников), затем на каждом k-м образованном промежутке времени [τk,τk+1) подвергают временную последовательность этого промежутка дискретному преобразованию Фурье и формируют частотные спектры, обнаруживают и запоминают в спектрах частоту ωk, на которой амплитуды спектральных составляющих превышают заданный порог, и, если при k=2 частота, обнаруженная на втором промежутке [τ2,τ3), совпадает с частотой, найденной на первом промежутке [τ1,τ2):ω2=ω1, то координаты второго источника М2 вычисляют по формуле М2=МΣ - M1, где М1 - координаты источника, найденные на первом промежутке, М∑ - координаты, найденные на втором промежутке по суммарному сигналу, и, если при k≥2 частота ωk не была обнаружена на предыдущих промежутках, то методом разности фаз на частоте ωk определяют координаты k-го источника Mk, а если частота ωk была обнаружена mk раз (mk≥1), то принимают решение о наличии mk+1 источников на частоте ωk с неизвестными координатами.
Алгоритмически способ заключается в следующем.
1. Принимаемый в элементе разрешения дальности аналоговый непрерывный сигнал в q-x приемных каналах  переводится в цифровую форму и формируются временные последовательности уg(ti), ti=t0+(i-1)Δt, Δt - шаг дискретизации, i=1,2,…,n, на промежутке времени [t1,tn].
переводится в цифровую форму и формируются временные последовательности уg(ti), ti=t0+(i-1)Δt, Δt - шаг дискретизации, i=1,2,…,n, на промежутке времени [t1,tn].
2. На начальном промежутке времени ti∈(t1,τ1) последовательности {yq(ti)} в q-x каналах  подаются на вход фильтра нулевого порядка, который выдает сглаженные значения xq(ti). Начиная с момента tM, где М - размер эффективной памяти фильтра, вычисляются отклонения уq(ti):
подаются на вход фильтра нулевого порядка, который выдает сглаженные значения xq(ti). Начиная с момента tM, где М - размер эффективной памяти фильтра, вычисляются отклонения уq(ti):
Δyq(ti)=yq(ti)-xq(ti).
Если из N последовательных значений Δyq(ti) L раз из N (например, 2 из 3) не попадает в заданный доверительный интервал, то в момент времени τ1 принимается решение о присутствии сигналов sq1(ti-τ1),  ti≥τ1, от первого источника с запаздываем τ1.
ti≥τ1, от первого источника с запаздываем τ1.
3. Осуществляется сглаживание yq(ti),  на промежутке [τ1,τ2) в соответствии с фильтром второго порядка, который выдает сглаженные значения xq(ti). В процессе фильтрации вычисляются первые остаточные ряды eq1(ti)=yq(ti)-xq(ti),
на промежутке [τ1,τ2) в соответствии с фильтром второго порядка, который выдает сглаженные значения xq(ti). В процессе фильтрации вычисляются первые остаточные ряды eq1(ti)=yq(ti)-xq(ti),  ti∈[τ1,τ2), к которым также применяется логический критерий для обнаружения момента времени τ2 прихода сигналов sq2(ti-τ2),
ti∈[τ1,τ2), к которым также применяется логический критерий для обнаружения момента времени τ2 прихода сигналов sq2(ti-τ2),  от второго источника с запаздыванием τ2.
от второго источника с запаздыванием τ2.
4. При обнаружении момента τ2 опять включается в работу фильтр второго порядка. Происходит сглаживание yq(ti),  на промежутке [τ2,τ3) и вычисляются вторые остаточные ряды eq1(ti)=yq(ti)-xq(ti),
на промежутке [τ2,τ3) и вычисляются вторые остаточные ряды eq1(ti)=yq(ti)-xq(ti),  ti∈[τ2,τ3), к которым применяется логический критерий для обнаружения момента времени τ3 прихода сигналов sq3(ti-τ3),
ti∈[τ2,τ3), к которым применяется логический критерий для обнаружения момента времени τ3 прихода сигналов sq3(ti-τ3),  от третьего источника и т.д. До момента tn находится оценка числа источников m как число обнаруженных моментов времени τ1, τ2, …, τm.
от третьего источника и т.д. До момента tn находится оценка числа источников m как число обнаруженных моментов времени τ1, τ2, …, τm.
5. На каждом k-м образованном промежутке времени [τk,τk+1), k=1,2,…,m, временные последовательности {yq(ti)},  ti∈[τk,τk+1), подвергаются дискретному преобразованию Фурье и формируются k-е частотные спектры карт,
ti∈[τk,τk+1), подвергаются дискретному преобразованию Фурье и формируются k-е частотные спектры карт,  k=1,2,…,m. Обнаруживается и запоминается в полученных спектрах частота ωk, на которой амплитуды спектральных составляющих превышают заданный порог во всех q-x каналах.
k=1,2,…,m. Обнаруживается и запоминается в полученных спектрах частота ωk, на которой амплитуды спектральных составляющих превышают заданный порог во всех q-x каналах.
6. Если при k=2 частота, обнаруженная на втором промежутке [τ2,τ1), совпадает с частотой, найденной на первом промежутке [τ1,τ2):ω2=ω1, то координаты второго источника М2 вычисляются по формуле М2=МΣ-М1, где М1 - координаты источника, найденные на первом промежутке [τ1,τ2), МΣ - координаты, найденные по суммарному сигналу на втором промежутке [τ2,τ3).
7. Если при k≥2 частота ωk не была обнаружена в предыдущих спектрах, то методом разности фаз на частоте ωk определяются координаты k-го источника Mk, а если частота ωk была обнаружена mk раз (mk≥1), то принимается решение о наличии mk+1 источников на частоте ωk с неизвестными координатами.
Результаты моделирования
Компьютерное моделирование частотно-временной обработки сигналов осуществлялось в среде Matlab. Приемопередающая станция посылала непрерывный сигнал с фазовой манипуляцией по коду Баркера в сантиметровом диапазоне длин волн. Зондирующий сигнал имел период фазовой манипуляции Т=6,6 нс и N=7 кодовой последовательности вида (+1+1+1-1-1+1-1), что обеспечивало разрешение по дальности ΔR=1 м. В каждом периоде фазовой манипуляции начальная фаза составляла ϕ0=0 (+1) или ϕ0=π(_1). При таких условиях источники сигналов находились в одном элементе разрешения дальности. Принимаемые в приемниках сигналы после декодера и режекторного фильтра переводились на низкую частоту и моделировались с шагом дискретизации Δt=1/(8ƒп), где ƒп=10 кГц.
Скорость первого объекта выбиралась постоянной величиной ν1=10 м/с, а второго объекта выбиралась случайным образом на промежутке от 10 до 15 м/с. Объекты наблюдались на дальности R=100 м в пределах ширины круговой диаграммы направленности антенны ±30° (на уровне 0,5 мощности). Количество повторений опыта на множестве реализаций случайного шума  при отношении сигнал-шум 30 дБ и среднеквадратическом отклонении (СКО) мультипликативного шума σγ=10-3 в условиях модели сигнала (1) составляло 5000 реализаций.
при отношении сигнал-шум 30 дБ и среднеквадратическом отклонении (СКО) мультипликативного шума σγ=10-3 в условиях модели сигнала (1) составляло 5000 реализаций.
Шум измерения фазы в каждом канале АР  где СКО
где СКО  рассчитывалось в соответствии с [1] как
рассчитывалось в соответствии с [1] как  где k=1; q=103. В таблице показаны результаты моделирования.
где k=1; q=103. В таблице показаны результаты моделирования.
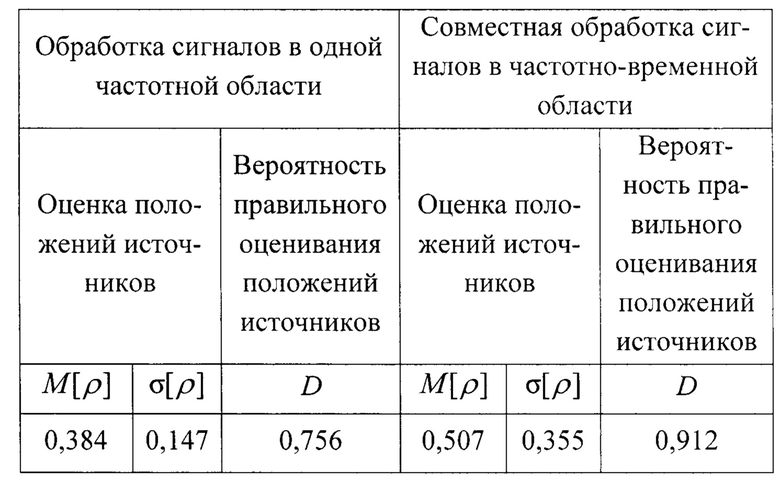
В сравнении даны следующие показатели: среднее значение М[ρ] и СКО σ[ρ] случайной величины ρ, имеющей смысл расстояния между моделируемым и найденным положением каждого объекта в метрах и распределенной по закону Максвелла, а также вероятность D правильного нахождения положений двух объектов. Положение считалось найденным правильно, если величина ρ не превышала 1 м. При обнаружении двух сигналов на одной частоте оценки координат первого источника находились во временной области, а оценки координат по суммарному сигналу - в частотной области.
Результаты моделирования в сравнительной оценке (по сравнению с одной частотной обработкой) показывают возможность повышения вероятности правильного оценивания положений всех движущихся источников с 0,76 до 0,91 за счет совместной обработки сигналов во временной и частотной областях. Понижение точности оценок положения объясняется меньшим объемом выборки на отдельных промежутках времени по сравнению с полным объемом выборки.
Способ может найти применение в существующих радиосистемах пеленгации движущихся с близкими скоростями и близко расположенных источников отражения.
Литература
1. Бакулев П.А. Радиолокационные системы. Учебник для вузов. Изд. 3-е, перераб. и доп. М.: Радиотехника, 2015. 440 с.
2. Патент RU 2572357. Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской РЛС / В.К. Клочко. Приоритет 25.11.2014. Опубл. 10.01.16. Бюл. №1.
3. Патент RU 2792196. Способ измерения угловых координат движущихся объектов доплеровской станцией / В.К. Клочко, В.П. Кузнецов, By Б.Х. Приоритет 27.06.2022. Опубл. 20.03.2023. Бюл. №8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ ОТ НЕСКОЛЬКИХ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2023 |
|
RU2824754C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ВО ВРЕМЕННОЙ И ЧАСТОТНОЙ ОБЛАСТЯХ | 2023 |
|
RU2799480C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ В СИСТЕМЕ РАДИОПРИЁМНИКОВ | 2023 |
|
RU2824755C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ВЕКТОРОВ СКОРОСТЕЙ НЕСКОЛЬКИХ ОБЪЕКТОВ СИСТЕМОЙ ДОПЛЕРОВСКИХ ПРИЕМНИКОВ | 2022 |
|
RU2803325C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ И НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО СИГНАЛАМ РАДИОИЗЛУЧЕНИЯ ИХ БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2599984C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ ДОПЛЕРОВСКОЙ СТАНЦИЕЙ | 2022 |
|
RU2792196C1 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
Изобретение относится к системам обработки радиосигналов в приемопередающих станциях, излучающих и принимающих отраженные от движущихся воздушных источников гармонические сигналы в режиме фазовой манипуляции по коду Баркера. Техническим результатом изобретения является совместная частотно-временная обработка принимаемых сигналов с целью обнаружения и определения координат нескольких источников, выявления возможных ошибок обнаружения и сверхразрешение в случае наличия двух источников. Способ частотно-временной обработки сигналов дополнительно заключается в совместной обработке сигналов, ведется в частотной и временной областях. Во временной области находятся моменты времени прихода сигналов от источников и устанавливается их число на каждом временном промежутке. В частотной области для каждого временного промежутка обнаруживаются частоты, на которых источники различимы и не различимы. Определяются оценки координат различимых источников, а также не различимых при наличии двух источников. 1 табл.
Способ частотно-временной обработки сигналов, заключающийся в приеме сигналов от движущихся источников отражения в элементе разрешения дальности, преобразовании сигналов во временные последовательности в приемных каналах, переводе временных последовательностей в частотные последовательности в спектре доплеровских частот, отличающийся тем, что принимают гармонические сигналы в режиме фазовой манипуляции по коду Баркера, подвергают последовательности временных отсчетов сигналов операциям фильтрации, вычисляют отклонения последовательностей от отфильтрованных значений и, если отклонения не попадают в доверительные интервалы, то фиксируют моменты времени τk появления k-х сигналов от источников (k=1,2,…,m, m - оценка числа источников), затем на каждом k-м образованном промежутке времени [τk,τk+1) подвергают временную последовательность этого промежутка дискретному преобразованию Фурье и формируют частотные спектры, обнаруживают и запоминают в спектрах частоту ωk, на которой амплитуды спектральных составляющих превышают заданный порог, и, если при k=2 частота, обнаруженная на втором промежутке [τ2,τ3), совпадает с частотой, найденной на первом промежутке [τ1,τ2): ω2=ω1, то координаты второго источника М2 вычисляют по формуле М2=МΣ - М1, где М1 - координаты источника, найденные на первом промежутке, МΣ - координаты, найденные на втором промежутке по суммарному сигналу, и, если при k≥2 частота ωk не была обнаружена на предыдущих промежутках, то методом разности фаз на частоте ωk определяют координаты k-го источника Mk, а если частота ωk была обнаружена mk раз (mk≥1), то принимают решение о наличии mk+1 источников на частоте ωk с неизвестными координатами.
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ И ОБРАБОТКИ СИГНАЛОВ В РАДИОЛОКАТОРАХ С АНТЕННЫМИ РЕШЕТКАМИ | 2017 |
|
RU2656369C1 |
| US 9678197 B2, 13.06.2017 | |||
| CN 112540412 A, 23.03.2021 | |||
| CN 109425854 A, 05.03.2019 | |||
| Устройство обработки фазоманипулированных радиолокационных сигналов | 2016 |
|
RU2628405C1 |
| GB 1459444 A, 22.12.1976. | |||
