Предлагаемое изобретение относится к радиолокации, в частности, к технике радиолокационного приема импульсных сигналов от щелей и может быть использовано для компенсации протяженных помех с неизвестной и изменяющейся интенсивностью, включая пассивные, активные шумовые и т.п., при действии импульсных помех большого уровня.
Известно устройство, содержащее два канала приема, в первом из которых к входу подключен вычитатель, и во втором - последовательно соединенные первый смеситель, узкополосный фильтр и второй смеситель, причем к входу второго смесителя подключен вход второго канала приема, а выход второго смесителя соединен со вторым входом вычитателя, выход которого является выходом устройства [1]. Однако данное устройство обладает низкой помехоустойчивостью, обусловленной тем, что в каналах выделения помех отсутствует какая-либо фильтрация принимаемых помех.
Известны цифровые устройства для компенсации протяженных помех [2, 3, 4]. Однако эти устройства сложны в реализации и настройке ввиду повышенных требований к стабильности и точности установки параметров элементов.
С точки зрения минимальной чувствительности по отношению и различным дестабилизирующим факторам (изменение температурного режима в широких пределах, естественное старение элементов и т.п.) предпочтительнее выглядят устройства для компенсации протяженных помех с использованием корреляционной обратной связи.
Из известных устройств наиболее близким по своей технической сущности к предлагаемому является автокомпенсатор, содержащий основной канал приема и соединенные по входу через фазовращатель синфазный и квадратурный каналы приема, в каждом из которых включен регулируемый усилитель, к выходам всех каналов подключен алгебраический сумматор, а к входам регулируемых усилителей в синфазном и квадратурных каналах приема подключены последовательно перемножитель, другой вход которого подключен к выходу сумматора, и интегратор [5].
Однако этот автокомпенсатор имеет невысокую точность компенсации протяженных помех с неизвестной и изменяющейся интенсивностью при действии большого уровня.
Цель изобретения - повышение точности компенсации протяженных помех с неизвестной и изменяющейся интенсивностью при действии импульсных помех большого уровня.
Поставленная цель достигается тем, что в автокомпенсатор, содержащий основной канал приема и соединенные по входу через фазовращатель синфазный и квадратурный каналы приема, в каждом из которых включен регулируемый усилитель, к выходам всех каналов подключен алгебраический сумматор, а к входам регулируемых усилителей в синфазном и квадратурном каналах приема подключены последовательно перемножитель, другой вход которого подключен к выходу сумматора, и интегратор, дополнительно введены в синфазном и квадратурном каналах приема первый дифференцирующий блок, вход которого подключен к выходу интегратора, управляемый переключатель на два положения, первый вход которого подключен к выходу перемножителя, второй вход - к выходу первого дифференцирующего блока, выход - к входу интегратора, а также подключенные к выходу сумматора последовательно соединенные амплитудный детектор, первый пороговый блок, второй дифференцирующий блок и второй пороговый блок, выход второго порогового блока подключен к третьему входу управляемого переключателя в синфазном и квадратурном каналах приема.
Существенным отличием предложенного автокомпенсатора является то, что для повышения точности компенсации протяженных помех используется метод экстраполяции протяженных помех в цепи формирования управляющего напряжения в синфазном и квадратурном каналах приема на интервалах действия обнаруженных импульсных помех большого уровня, который ранее в устройствах аналогичного назначения не применялся. Следовательно, изобретение удовлетворяет критерию существенного отличия.
Изобретение будет понятно из следующего описания и приложенных к нему чертежей.
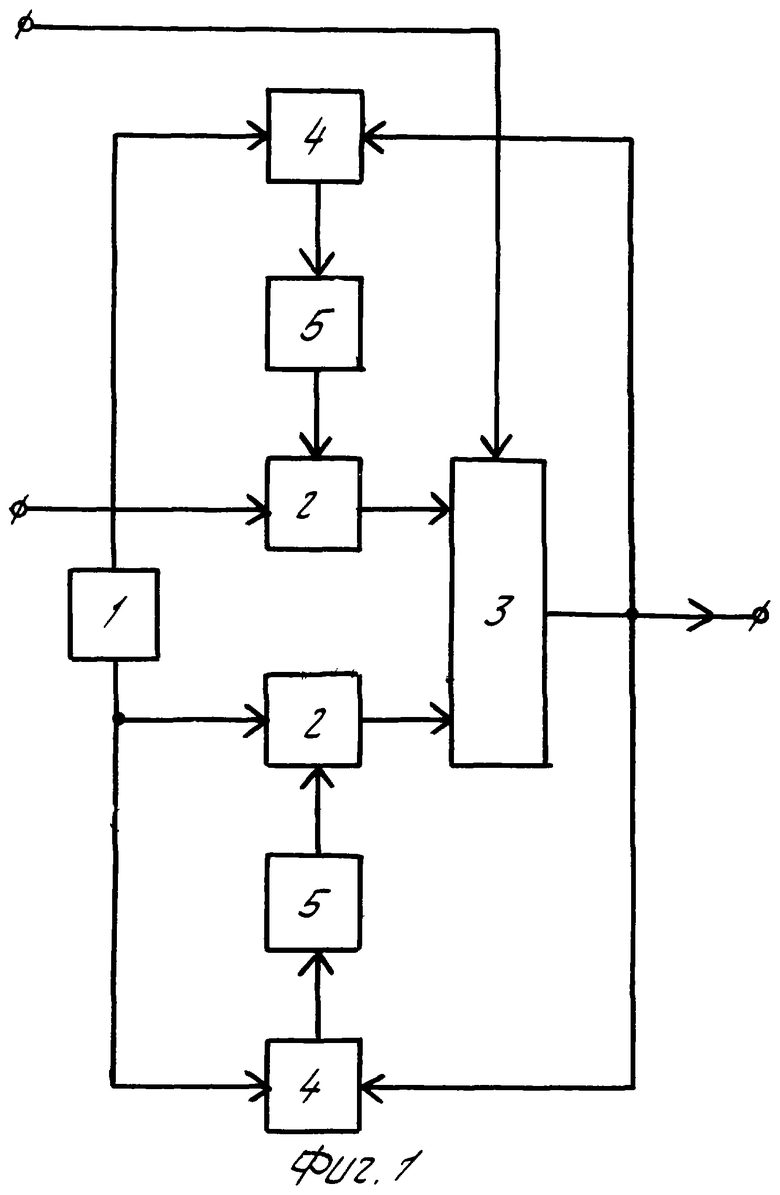
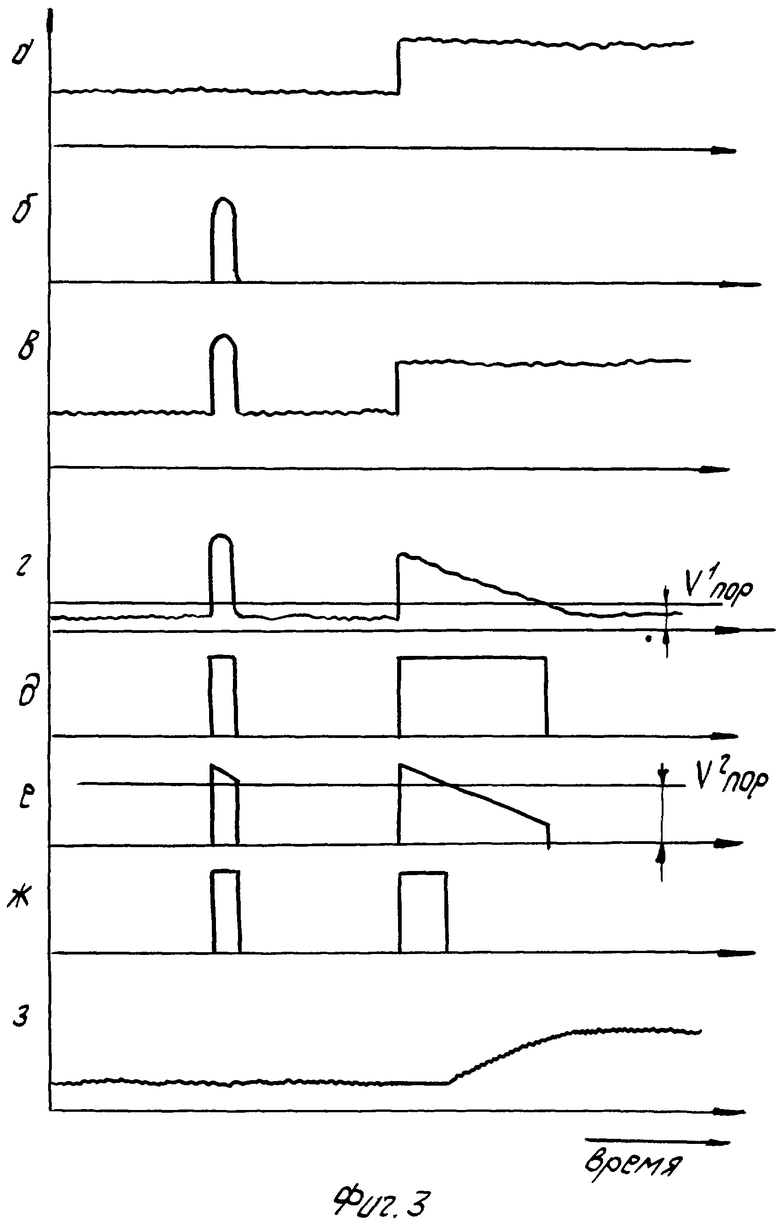
На фиг.1 приведена структурная электрическая схема прототипа; на фиг.2 приведена структурная электрическая схема предлагаемого автокомпенсатора; на фиг.3 показаны временные диаграммы огибающих напряжений для ряда точек схемы автокомпенсатора; на фиг.4 приведен график зависимости выигрыша в коэффициенте подавления протяженной помехи предлагаемого автокомпенсатора по отношению к его прототипу от коэффициента заполнения потока импульсных помех.
Автокомпенсатор (фиг.2) содержит основной канал приема и соединенные по входу через фазовращатель 1 синфазный и квадратурный каналы приема, в каждом из которых включен регулируемый усилитель 2, к выходам всех каналов подключен алгебраический сумматор 3, а к входам регулируемых усилителей 1 в синфазном и квадратурном каналах приема подключен последовательно перемножитель 4, другой вход которого подключен к выходу сумматора 3, интегратор 5, а также первый дифференцируюший блок 6, вход которого подключен к выходу интегратора 5, управляемый переключатель 7 на два положения, первый вход которого подключен к выходу перемножителя 4, второй вход - к выходу первого дифференцирующего блока 6, выход - к входу интегратора 5, а также подключенные к выходу сумматора 3 последовательно соединенные амплитудный детектор 8, первый пороговый блок 9, второй дифференцирующий блок 10, второй пороговый блек 11, выход второго порогового блока 11 подключен к третьему входу управляемого переключателя 7 в синфазном и квадратурном каналах приема.
Автокомпенсатор (фиг.2) работает следующим образом.
Аддитивная смесь протяженной помехи с неизвестной и изменяющейся интенсивностью (фиг.3,а) и импульсных помех (фиг.3,б) с выхода линейной части радиолокационного приемника подается на информационный вход усилителя 2 с регулируемым коэффициентом усиления в синфазном и квадратурном каналах приема, а также на вход основного канала приема, а также на вход основного канала приема (фиг.3,в) и одновременно на первый вход перемножителя 4, на второй вход которого подается напряжение с выхода сумматора 3. Формирование управляющего напряжения усилителя 2 осуществляется путем временного усреднения выходного напряжения перемножителя 4 в интеграторе 5. Напряжение с выхода интегратора 5 (фиг.3,з) подается на управляющий вход усилителя 2 и изменяет его коэффициент усиления. С увеличением управляющего напряжения коэффициент усиления регулируемого усилителя 2 увеличивается. Усиленное напряжение с выхода регулируемого усилителя 2 в синфазном и квадратурном каналах приема, а также напряжение основного канала приема подается на входы алгебраического сумматора 3, в котором происходит компенсация протяженной помехи.
В установившемся режиме величина управляющего напряжения (фиг.3,з) в синфазном и квадратурном каналах приема должна стать пропорциональной мощности и коэффициенту корреляции напряжений в основном и синфазном (квадратурном) каналах приема.
Благодаря этому уровень Vвых протяженной помехи на выходе сумматора 3 стабилизируется вне зависимости от изменений интенсивности помехи на входе автокомпенсатора.
Однако при появлении на входе автокомпенсатора (фиг.3,в) импульсных помех большого уровня, последние могут поступить в цепь формирования управляющего напряжения, подзарядить емкость интегратора 5, и увеличить, тем самым, напряжение на управляющем входе усилителя 2. В результате может существенно ухудшиться точность компенсации протяженной помехи. Восстановление точности компенсации протяженной помехи после действия импульсных помех большого уровня за счет естественного разряда емкости интегратора 5 будет осуществляться в течение продолжительного времени порядка эквивалентной постоянной времени автокомпенсатора.
Для исключения подзаряда емкости интегратора 5 импульсными помехами большого уровня и устранения их влияния на формируемое управляющее напряжение в синфазном и квадратурном каналах приема в автокомпенсатор (фиг.2) введен переключатель 7, управляемый прямоугольными импульсами нормированной амплитуды Vн с выхода первого порогового блока 9 (фиг.3,д) и осуществляющий бланкирование обнаруженных импульсных помех на входе интегратора 5. Постоянный пороговый уровень первого порогового блока 9 выбирается из условия: 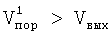 (фиг.3,г).
(фиг.3,г).
Для исключения самобланкирования протяженной помехи в цепи формирования управляющего напряжения и предотвращения отключения цепи формирования управляющего напряжения при скачкообразном увеличении интенсивности протяженной помехи (фиг.3,а,в) импульсы с выхода первого порогового блока 9 подаются на вход управления переключателем 7 через последовательно соединенные второй дифференцирующий блок 10 и второй пороговый блок 11. Постоянная времени дифференцирующего блока 10 определяется максимальной длительностью импульсных помех и устанавливается согласно соотношению: τдб=τми (τдб - постоянная времени второго дифференцирующего блока 10, τми - максимальная длительность импульсных помех). При этой импульсные помехи с выхода первого порогового блока 9 практически не ослабляются и без существенного искажения своей формы появляются на входе второго порогового блока 11 (фиг.3,е). Пороговый блок 11 с порогом  выполняет роль формирователя управляющих импульсов нормированной амплитуды (фиг.3,ж), поступающих на вход управления переключателем 7. Как и первый пороговый блок 9, второй пороговый блок 11 может быть выполнен по схеме типового компаратора с фиксированным пороговым уровнем [6]. По импульсам с выхода второго порогового блока 11 срабатывает переключатель 7, и вход интегратора отключается от выхода перемножителя 4.
выполняет роль формирователя управляющих импульсов нормированной амплитуды (фиг.3,ж), поступающих на вход управления переключателем 7. Как и первый пороговый блок 9, второй пороговый блок 11 может быть выполнен по схеме типового компаратора с фиксированным пороговым уровнем [6]. По импульсам с выхода второго порогового блока 11 срабатывает переключатель 7, и вход интегратора отключается от выхода перемножителя 4.
Для предотвращения возможного уменьшения проинтегрированного в интеграторе 5 напряжения (фиг.3,з) на интервалах бланкирования импульсных помех большого уровня (фиг.3,ж) в цепь заряда емкости интегратора 5 подается экстраполированное (расчетное) управляющее напряжение через второй информационный вход и выход переключателя 7. Для формирования экстраполированного напряжения (фиг.3,з) в автокомпенсатор включен первый дифференцирующий блок 6, коэффициент передачи которого связан инверсным преобразованием с коэффициентом передачи интегратора 5: Кдб(jω)=1/Kи(jω). В результате обеспечивается сглаживание формы напряжения в цепи заряда емкости интегратора 5 (фиг.3,з). Тем самым, исключается изменение управляющего напряжения на интервалах действия обнаруженных импульсных помех (фиг.3,г), и, следовательно, повышается точность компенсации протяженной помехи автокомпенсатором.
Таким образом, благодаря включению в автокомпенсатор дополнительных блоков 6-11 с новыми функциональными связями удается устранить влияние импульсных помех большого уровня на формируемое управляющее напряжение в синфазном и квадратурном каналах приема и повысить, следовательно, точность компенсации протяженных помех с изменяющейся и неизвестной интенсивностью.
Так как все блоки устройства являются широко известными в радиотехнике, то реализация устройства не представляется трудной.
Для подтверждения работоспособности и оценки эффективности предлагаемого устройства автором было проведено машинное моделирование автокомпенсатора. В результате моделирования была получена оценка выигрыша в коэффициенте подавления протяженной помехи предлагаемого автокомпенсатора по отношению к его прототипу при различных параметрах потока импульсных помех большого уровня. График зависимости указанного выигрыша от коэффициента заполнения упомянутого потока Р (определяется произведением длительности импульсных помех большого уровня на их среднюю частоту следования) при отношении импульсная помеха/протяженная помеха на входе автокомпенсатора 50 дБ и стационарном коэффициенте подавления протяженной помехи автокомпенсатором 40 дБ (при отсутствии импульсных помех большого уровня), показан на фиг.4. Видно, что с увеличением коэффициента заполнения потока импульсных помех большого уровня значение выигрыша возрастает, и при Р порядка 0,05 (соответствует реальной помеховой обстановке) В=20 дБ, что говорит о существенном повышении точности компенсации протяженных помех при действии импульсных помех большого уровня. (Быстродействие предложенного автокомпенсатора по отношению к его прототипу практически не ухудшилось.)
Источники информации
1. Патент США №3202990, кл.343-100, 1968.
2. Авт. св. СССР №687941, МКИ G 01 S 7/36, H 04 B 1/10, 1980.
3. Авт. св. СССР №743208, МКИ G 01 S 7/36, H 04 B 1/10, 1980.
4. Авт. св. СССР №809018, МКИ G 01 S 7/36, 1981.
5. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981, с.356, рис.20.14.
6. Тетельбаум И.М. и др. 400 схем для АВМ. М.: Энергия, 1978, с.114, рис.4-1-4.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ КОМПЕНСАТОР | 1983 |
|
SU1840994A1 |
| КОМПЕНСАТОР ПОМЕХ | 1985 |
|
SU1841064A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2000 |
|
RU2201619C2 |
| Автокомпенсатор прерывистых помех | 1977 |
|
SU678679A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ В ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКЕ | 1983 |
|
RU2035097C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2006 |
|
RU2331113C2 |
| Устройство для корреляционного приема фазоманипулированных сигналов с подстройкой частоты | 1984 |
|
SU1221762A1 |
| МНОГОКАНАЛЬНЫЙ АВТОКОМПЕНСАТОР | 1984 |
|
SU1841060A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2006 |
|
RU2321069C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СТРУКТУРНЫХ ПОМЕХ | 2013 |
|
RU2534221C1 |
Изобретение относится к радиолокации и может быть использовано для компенсации протяженных помех с неизвестной и изменяющейся интенсивностью. Технический результат заключается в повышении точности компенсации протяженных помех с неизвестной и изменяющейся интенсивностью при действии импульсных помех большого уровня. Для этого устройство содержит основной канал приема, фазовращатель, синфазный и квадратурный каналы приема, в которые введены управляемый переключатель, первый и второй дифференциальные блоки, амплитудный детектор, первый и второй пороговые блоки. 4 ил.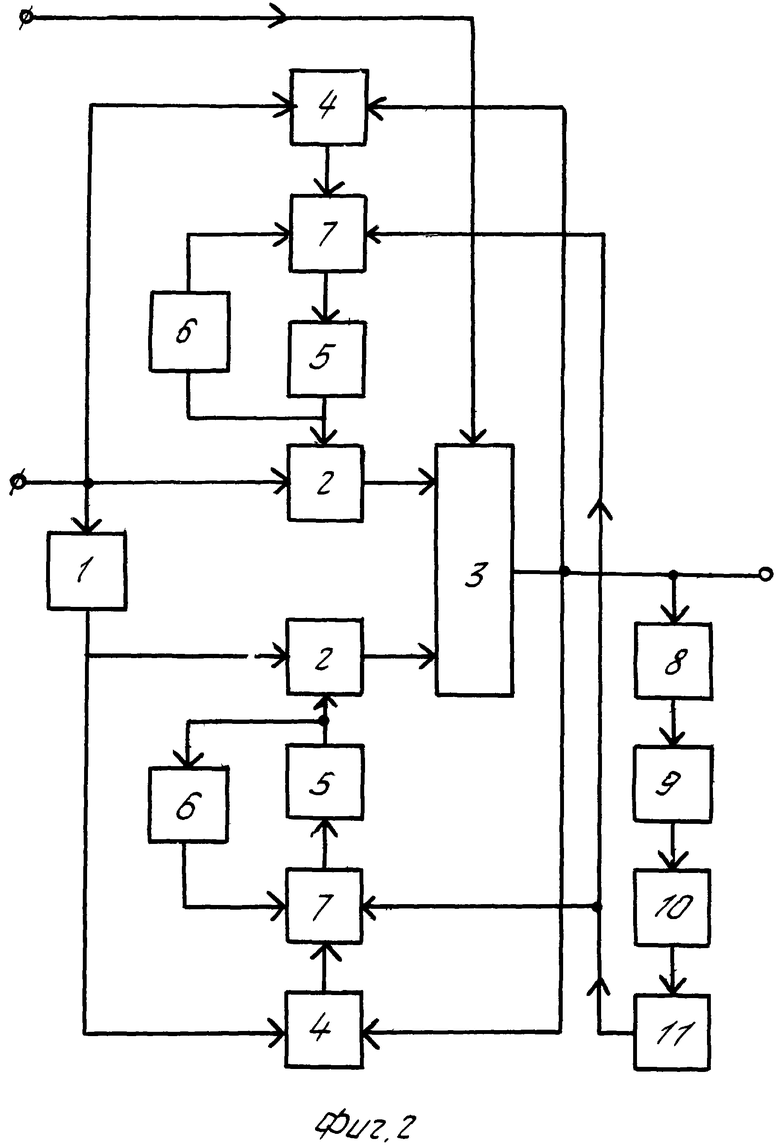
Автокомпенсатор помех, содержащий основной канал приема и соединенные по входу через фазовращатель синфазный и квадратурный каналы приема, каждый из которых содержит подключенные ко входу соответствующего канала умножитель и регулируемый усилитель, к другому входу которого подключен интегратор, при этом выходы регулируемых усилителей обоих каналов и основной канал подключены соответственно ко входам сумматора, выход которого соединен с другими входами умножителя соответствующего канала и является выходом автокомпенсатора помех, отличающийся тем, что, с целью повышения точности компенсации протяженных помех, в синфазном и квадратурном каналах приема введены включенный между выходом умножителя и входом интегратора, управляемый переключатель, ко второму входу которого через введенный первый диференциальный блок подключен выход интегратора, а также введены последовательно соединенные амплитудный детектор, подключенный к выходу сумматора, первый пороговый блок, второй дифференциальный блок и второй пороговый блок, подключенный к третьим входам управляемых переключателей обоих каналов.
| Тетельбаум и др | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |

