Предлагаемое изобретение относится к области радиолокации. Оно может быть использовано в радиолокационных приемниках для защиты от помех.
Известен автоматический компенсатор [1], содержащий сумматор, основной канал, компенсационный канал, состоящий из двух реверсируемых усилителей, сумматора, фазовращателя, линейного усилителя и инвертора, квадратурный корреляционный перемножитель, состоящий из усилителя обратной связи, двух фазовых детекторов, опорного усилителя и фазовращателя, и два сглаживающих фильтра.
В сумматоре известного автоматического компенсатора происходит вычитание помех основного и компенсационного каналов путем управления комплексными характеристиками компенсационного канала при помощи корреляционного перемножителя и сглаживающих фильтров.
Одним из основных недостатков известного автоматического компенсатора является снижение его быстродействия, наблюдаемое при малых уровнях входной помехи, а также в случае больших уровней входной помехи при ограничении выходных помех автоматического компенсатора в корреляционном перемножителе.
Так, например, при динамическом диапазоне входных помех равном 30 дБ, быстродействие автоматического компенсатора для минимального уровня входных помех может снизиться в 30 раз. А при ограничении выходной помехи автоматического компенсатора в корреляционном перемножителе на 6 дБ, быстродействие автоматического компенсатора снижается более чем в 2 раза. Снижение быстродействия уменьшает эффективность работы автоматического компенсатора в быстро меняющейся помеховой обстановке, делает невозможным компенсацию помех с огибающей сложной формы и импульсных помех.
Повышение же быстродействия автоматического компенсатора путем какого-либо увеличения коэффициентов усиления его элементов невозможно, так как приводит к потере устойчивости при больших уровнях входных помех.
Известен также автоматический компенсатор, содержащий основной и компенсационный каналы, цепь автоматического регулирования, смеситель выходного сигнала с сигналом основного канала и сумматор. В таком устройстве достигается уменьшение времени переходного процесса при воздействии помеховых сигналов с огибающей сложной формы за счет повышения порядка астатизма цепи автоматического регулирования. Однако такое повышение порядка астатизма не устраняет снижения быстродействия автоматического компенсатора при малых уровнях входных помех и при ограничении выходных помех в цепи автоматического регулирования.
Из известных автоматических компенсаторов наиболее близким к заявленному устройству является корреляционный автокомпенсатор шумовой помехи [2], содержащий сумматор, линию задержки, смесители, корреляторы, детекторы огибающей, блоки нормировки.
В таком устройстве уменьшается зависимость быстродействия от взаимной задержки помех основного и компенсационного каналов за счет нормировки управляющих напряжений. Но такие меры не устраняют снижение быстродействия вследствие уменьшения уровня входных помех и не учитывают процесс ограничения выходных помех автоматического компенсатора в корреляторах.
Таким образом, недостатком известных автоматических компенсаторов является снижение быстродействия вследствие уменьшения усиления элементов компенсационного канала при уменьшении уровня входной помехи и вследствие перегрузки элементов квадратурного коррелятора при ограничении выходных помех автоматического компенсатора.
Цепь предлагаемого изобретения заключается в повышении быстродействия автоматического компенсатора.
Поставленная цель достигается тем, что в автоматический компенсатор, содержащий сумматор, основной и управляемый компенсационный каналы, выходы которых подключены ко входам сумматора, квадратурный коррелятор, входы которого подключены ко входу компенсационного канала и выходу сумматора, два усреднителя, входы которых подключены к квадратурным выходам коррелятора, а выходы - к управляющим входам компенсационного канала и два детектора, введены последовательно соединенные с первым детектором первое пороговое устройство и вычислитель отношений, соединенное с выходом второго детектора второе пороговое устройство, выход которого подключен ко второму входу вычислителя отношений, два регулируемых элемента, подключенных к усреднителям и выходу вычислителя отношений, причем вход первого детектора подключен к входу компенсационного канала, а вход второго детектора - к выходу сумматора.
Введенные регулируемые элементы предназначены для регулирования постоянной времени усреднителей и автоматического компенсатора в целом;
вычислитель отношений - для формирования управляющих напряжений регулируемых элементов в соответствии с уровнями входных и выходных помех автоматического компенсатора;
пороговые устройства - для ограничения минимальных входных напряжений вычислителя, определяющих пределы регулирования постоянной времени;
подключение детекторов к входу компенсационного канала и выходу сумматора обеспечивает анализ входных и выходных уровнен помех, влияющих на быстродействие автоматического компенсатора.
В своей совокупности все узлы предлагаемого автоматического компенсатора обеспечат получение качественно нового эффекта - автоматическую установку минимальной устойчивой постоянной времени усреднителей во всем динамическом диапазоне входных и выходных помех автоматического компенсатора и устранение возможности его самовозбуждения.
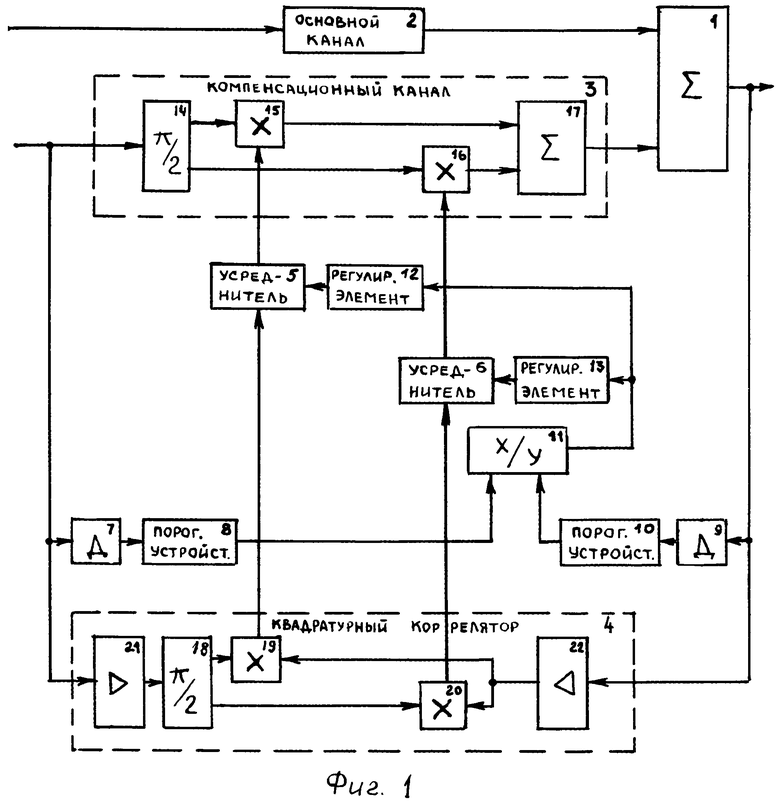
На чертеже (фиг.1) представлена функциональная схема предлагаемого устройства.
Автоматический компенсатор содержит сумматор 1, основной 2 и компенсационный 3 каналы, квадратурный коррелятор 4, два усреднителя 5, 6, первый детектор 7, первое пороговое устройство 8, второй детектор 9, второе пороговое устройство 10, вычислитель отношений 11 и два регулируемых элемента 12, 13.
Компенсационный канал 3 может быть выполнен из квадратурного расщепителя 14, двух управляемых смесителей 15, 16 и сумматора 17.
Квадратурный коррелятор 4 может быть выполнен из квадратурного расщепителя 18 и двух корреляционных перемножителей 19, 20. На входах квадратурного коррелятора 4 могут быть включены опорный усилитель-ограничитель 21 и усилитель выходных помех автоматического компенсатора 22.
Предлагаемый автоматический компенсатор работает следующим образом.
На вход основного канала 2 поступают полезные сигналы и помехи, а на вход компенсационного канала 3 - преимущественно помехи. В сумматоре 1 происходит вычитание коррелированных помех основного и компенсационного каналов.
Автоматическое регулирование комплексных частотных характеристик компенсационного канала с целью полной компенсации помех осуществляется сглаженными в усреднителях 5 и 6 квадратурными управляющими напряжениями с выходов квадратурного коррелятора 4.
Регулируемые элементы 12 и 13 изменяют величину постоянной времени усреднителей 5 и 6 пропорционально уровню огибающей входной помехи компенсационного канала 3 на выходе детектора 7 и обратно пропорционально уровню огибающей выходной помехи автоматического компенсатора на выходе детектора 9. Такой закон управления обеспечивается вычислителем отношений 11 и позволяет, в зависимости от уменьшения коэффициента усиления смесителей 15 и 16 компенсационного канала 3 вследствие уменьшения уровня входной помехи И (ИЛИ) в зависимости от уменьшения коэффициента усиления квадратурного коррелятора 4 вследствие ограничения выходных помех автоматического компенсатора в перемножителях 19, 20 и усилителе 22, уменьшать постоянную времени усреднителей 5 и 6. Тем самым во всем динамическом диапазоне входных и выходных помех устанавливается минимальное устойчивое значение постоянной времени автоматического компенсатора.
Пороговое устройство 8 ограничивает минимальное входное напряжение вычислителя 11 из условия устойчивости автоматического компенсатора в отсутствие входных помех.
Пороговое устройство 10 ограничивает минимальное входное напряжение вычислителя на уровне порога ограничения выходной помехи в квадратурном корреляторе 4 и обеспечивает регулирование постоянной времени усреднителей 5 и 6 только при ограничении выходных помех автоматического компенсатора.
Регулируемые элементы могут быть выполнены совместно с усреднителями в виде управляемых интегрирующих звеньев на операционных усилителях. Пороговые устройства могут быть реализованы на аналоговой схеме "ИЛИ", на входы которой подаются напряжение порога и выходное напряжение детектора.
Таким образом, регулирование постоянных времени усреднителей 5 и 6 позволяет во всем динамическом диапазоне входных и выходных помех автоматического компенсатора устанавливать минимальную по условию устойчивости постоянную времени автоматического компенсатора и тем самым повысить его быстродействие - одну из основных технических характеристик автоматического компенсатора, определяющих его эффективность. Повышение быстродействия может достигать величины равной динамическому диапазону входных помех и степени ограничения выходных помех.
Макетирование и моделирование предлагаемого автоматического компенсатора, выполненного на современной элементной базе, показало возможность повышения быстродействия в 10-20 раз с соответствующим увеличением подавления помех, возможность подавления помех с огибающей сложной формы (например, шумовой и хаотической импульсной).
Литература
1. И.Н. Бурмистров. "Аппаратурные ошибки и качество работы автокомпенсатора помех с квадратурными преобразователями". "Вопросы судостроения", серия "Радиолокация", выпуск 7, 1977.
2. "Изобретательские предложения по радиоэлектронике", серия РССН, №6, 1980 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАТОР ПОМЕХ | 1985 |
|
SU1841064A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1988 |
|
SU1841099A1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЕНСАТОР | 1986 |
|
SU1841000A1 |
| МНОГОКАНАЛЬНЫЙ АВТОКОМПЕНСАТОР | 1984 |
|
SU1841060A1 |
| АВТОКОМПЕНСАТОР ПОМЕХ | 1986 |
|
SU1840021A1 |
| ПРИЕМО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО РАДИОЛОКАТОРА | 1985 |
|
SU1841065A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ АКТИВНЫХ ПОМЕХ | 2009 |
|
RU2444751C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1979 |
|
SU1840912A1 |
| Частотный дискриминатор | 1977 |
|
SU708503A2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 2008 |
|
RU2363014C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат - повышение быстродействия автоматического компенсатора. Указанный результат достигается за счет того, что автокомпенсатор содержит приемник, компенсационный канал, состоящий из фазовращателя на π/2, двух перемножителей и сумматора, квадратурный коррелятор, состоящий из первого усилителя, фазовращателя на π/2, двух перемножителей, второго усилителя, автокомпенсатор содержит также два пороговых блока, делитель, два регулируемых интегратора. Перечисленные средства определенным образом соединены между собой. 1 ил.
Автоматический компенсатор, содержащий сумматор, приемник, компенсационный канал, квадратурный коррелятор и два детектора, при этом вход приемника является сигнальным входом устройства, выход сумматора выходом устройства, компенсационный канал состоит из фазовращателя на π/2, двух перемножителей и сумматора, выход которого является выходом компенсационного канала, первый вход соединен с выходом первого перемножителя, второй вход соединен с выходом второго перемножителя, первые входы перемножителей соединены с выходами фазовращателя на π/2, вход которого является входом компенсационного канала, второй вход первого перемножителя является первым управляющим входом компенсационного канала, а второй вход второго - вторым управляющим входом компенсационного канала, квадратурный коррелятор состоит из последовательно соединенных первого усилителя и фазовращателя на π/2, а также двух перемножителей и второго усилителя, вход которого является вторым входом квадратурного коррелятора, а выход соединен с первыми входами перемножителей, вторые входы которых соединены с выходами фазовращателя на π/2, а выходы являются соответственно первым и вторым выходами квадратурного коррелятора, вход первого усилителя является первым входом квадратурного коррелятора, при этом соединенные вместе первый вход квадратурного коррелятора, первого детектора и сигнальный вход компенсационного канала являются дополнительным входом устройства, выход сумматора соединен с входом второго детектора и вторым входом квадратурного коррелятора, выход компенсационного канала соединен с вторым входом сумматора, отличающийся тем, что, с целью повышения быстродействия, в него введены два пороговых блока, делитель, а также два регулируемых интегратора, при этом выход первого управляемого интегратора соединен с первым управляющим входом, а выход второго - с вторым управляющим входом компенсационного канала, сигнальный вход первого управляемого интегратора соединен с первым выходом, а сигнальный вход второго управляемого интегратора - с вторым выходом квадратурного интегратора, выход делителя соединен с управляющими входами управляемых интеграторов, первый вход делителя соединен с выходом первого порогового блока, второй вход - с выходом второго порогового блока, входы которых соединены соответственно с выходом первого и второго детекторов.
| Бурмистров И.Н | |||
| Аппаратурные ошибки и качество работы автокомпенсатора помех с квадратурными преобразователями | |||
| Вопросы судостроения, серия "Радиолокация", вып.7, 1977. |

