Предлагаемый радиолокатор относится к радиотехнике и предназначен для использования в военных радиолокационных системах, работающих при воздействии помех по боковым лепесткам диаграммы направленности (ДН) антенны.
Известны радиолокаторы, в которых приняты меры по повышению защищенности от помех, воздействующих по боковым лепесткам диаграммы направленности антенны.
Так, в радиолокаторе, описанном в книге "Радиолокационные устройства" под ред. В.В. Григорина-Рябова, М., "Сов. радио", 1970 г., стр. 518, рис. 18, 21, имеется дополнительный приемный канал с всенаправленной по азимуту антенной, выходной видеосигнал которого вычитается из видеосигнала основного канала. Коэффициент усиления дополнительной (компенсационной) антенны должен превышать уровень наибольшего из боковых лепестков ДН антенны основного (радиолокационного) канала. Сигналы, принимаемые дополнительной антенной, всегда будут больше сигналов, принимаемых боковыми лепестками основной антенны, так как усиления дополнительной антенны больше, чем боковых лепестков основной антенны. Если вычитающий узел отрегулирован так, чтобы на его выход проходили сигналы только в случае превышения сигналов основного канала над сигналами дополнительного канала, то помеха, принятая боковыми лепестками, будет подавлена.
Этот радиолокатор имеет следующие недостатки.
Первым недостатком является то, что часть полезного сигнала при приеме теряется. Это уменьшает соотношение сигнал-помеха и, следовательно, помехоустойчивость.
Вторым недостатком является то, что при одновременном воздействии по боковым лепесткам двух /или нескольких/ помех защита от помех не обеспечивается, так как амплитуда сигнала на выходах приемных каналов зависит от фаз, с которыми суммируются помехи на высоких частотах, а эти фазы могут быть совершенно разными в основном канале приема и в дополнительном.
Третьим недостатком является то, что не обеспечивается подавление нестационарных помех /например, скользящих по частоте/.
Известен радиолокатор, в котором устранен первый из указанных выше недостатков (см. "Радиолокационные устройства", под ред. В.В. Григорина-Рябова, М., "Сов. радио", 1970 г., стр. 519, рис. 18, 23. В нем исключаются потери полезного сигнала при приеме по основному лучу путем формирования в диаграмме направленности дополнительной антенны минимума, совпадающего по направлению с направлением основного луча антенны РЛС. Это достигается путем введения в приемник РЛС направленного ответвителя, аттенюатора фазовращателя и узла вычитания.
Однако остальные указанные недостатки в этом радиолокационном приемнике сохраняются.
Известен радиолокационный приемник, в котором улучшена защита от одновременно действующих нескольких помех /см. "Теоретические основы радиолокации" под ред. В.Е. Дулевича, М., "Сов. радио", 1978 г., стр. 458, рис. 16.5/
Повышение помехозащищенности в нем достигается тем, что компенсация осуществляется на промежуточной частоте /когерентный метод/, а уровень компенсирующего сигнала регулируется автоматически при помощи обратной связи.
Этот радиолокатор принят нами за прототип.
Он содержит связанные через антенный переключатель передатчик, антенну и основной приемник, М компенсационных каналов, содержащих компенсационную антенну, приемник и формирователь компенсирующего сигнала (узлы, обозначенные Кдоп. и 
Антенны компенсационных каналов у него всенаправленные по азимуту с дополнительным минимумом, механически закрепленные на основной антенне и вращающиеся вместе с ней.
Информация о направлении луча основной антенны здесь используется для сопряжения вращения основной антенны и вращения луча развертки на индикаторе.
В этом известном радиолокаторе не обеспечивается защита от нестационарных помех, действующих с нескольких направлений. Если уровни помех в полосе пропускания основного приемника изменяются /например, из-за скольжения помех по частоте/, то известное устройство будет находиться в режиме непрерывных переходных процессов. Это связано с тем, что для любого сочетания уровней помех в устройстве имеются свои весовые коэффициенты суммирования (вычитания), обеспечивающие наибольшее общее подавление помех, и именно к этим сочетаниям весовых коэффициентов и стремятся имеющиеся в системе цепи корреляционного регулирования.
Скорость установления весовых коэффициентов системами регулирования в современных радиолокаторах составляет обычно 200÷1000 мкс. Ограниченность скорости объясняется наличием в цепях корреляционного регулирования сглаживающих фильтров нижних частот, которые должны обеспечить работу именно по коррелированным сигналам, а все остальные, снижающие точность регулирования, отфильтровать. Качество фильтрации повышается при уменьшении полосы пропускания этих фильтров, однако при этом удлиняются переходные процессы. В известных системах параметры фильтров всегда выбираются с учетом противоположных требований конечной точности регулирования по стационарным помехам и быстродействия.
В последние годы техника радиопротиводействия сделала значительные шаги в направлениях постановки помех с нескольких направлений, повышения потенциала помехи, использования нестационарных помех (см. Программу разработки в США беспилотных самолетов для целей РЭБ, Радиоэлектроника за рубежом, №9, 1977; Передатчики помех одноразового пользования, Зарубежное военное обозрение, №6, 1978 г. Перспективы использования ФАР в станциях радиопротиводействия, Радиоэлектроника за рубежом, вып. 42, 1982/.
Созданы станции помех с потенциалом на 10-20 дБ выше, чем прежние (что, в первую очередь, связано с широким внедрением остронаправленных антенн типа ФАР, имеющих, соответственно, больший коэффициент усиления).
В связи с этим реальный коэффициент подавления помехи нужно значительно повысить, довести его до уровня 30÷40 дБ. Причем это нужно обеспечить и в условиях нестационарных помех, так как во всех станциях помех последних лет разработки режим постановки скользящих по частоте помех является одним из основных, поскольку не требует точного определения частоты подавляемой РЛС, что в современной сложной помеховой обстановке затруднено.
Как показали проведенные нами расчеты (см. ниже), известное устройство при воздействии нестационарных помех с нескольких направлений и, как следствие, непрерывных переходных процессов в цепях регулирования имеет коэффициент подавления порядка 5-10 дБ, что совершенно недостаточно.
Уязвимость известных радиолокаторов со стороны созданных в последние годы станций помех требует срочного решения вопроса.
Целью данного изобретения является повышение помехозащищенности радиолокатора, обеспечение его работоспособности в указанных усложнившихся условиях.
Поставленная цель достигается тем, что в радиолокатор с подавлением помех, принятых по боковым лепесткам диаграммы направленности антенны, содержащий связанные через антенный переключатель передатчик, антенну и основной приемник, М компенсационных каналов, содержащих компенсационную антенну, приемник и формирователь компенсирующего сигнала (ФКС), вход которого соединен с выходом приемника, соединенные последовательно узел суммирования, согласованный фильтр и выходные цепи, датчик ориентации антенны и синхронизатор, первый выход которого соединен с входом запуска выходных цепей, а второй выход соединен с входом запуска передатчика, второй выход которого соединен с гетеродинными входами приемников основного и всех компенсационных каналов, причем вход датчика ориентации антенны связан с основной антенной, а его выход соединен с управляющим входом выходных цепей, при этом первый вход узла суммирования соединен с выходом основного приемника, а его выход соединен с опорными входами ФКС всех компенсационных каналов, вводятся датчик уровня помехи, вход которого соединяются с выходом основного приемника, пороговый узел, вход которого соединяется с выходом датчика уровня помехи, а каждый компенсационный канал содержит разделитель поляризаций, датчик ориентации антенны, два датчика уровня помехи, два пороговых узла, два элемента И, элемент ИЛИ, инвертор, коммутатор, узел суммирования, узел совпадения и дополнительные приемник и ФКС, сигнальный и опорный входы которого соединяются, соответственно, с выходом дополнительного приемника и с опорным входом первого ФКС, выходы обоих ФКС соединяются с входами узла суммирования, выход которого соединяется с сигнальным входом коммутатора, выход которого соединяется с соответствующим инверсным входом узла суммирования основного канала, а управляющий вход соединяется с выходом первого элемента И и первым входом второго элемента И, выход которого соединяется с управляющими входами обоих ФКС, а второй вход через инвертор соединяется с выходом узла совпадения, первый вход которого соединяется с выходом датчика ориентации основной антенны, а второй вход соединяется с выходом датчика ориентации антенны, связанного с компенсационной антенной данного канала, сигнальный выход которой соединяется и входом разделителя поляризации, выходы которого соединяются с сигнальными входами приемников, выходы которых через соответствующие датчики уровня помехи и пороговые узлы соединяются с входами элемента ИЛИ, выход которого соединяется с первым входом первого элемента И, второй вход которого соединяется с выходом порогового узла основного канала, причем гетеродинные входы обоих приемников соединяются между собой, а входы датчиков ориентации антенн всех компенсационных каналов соединены с дополнительными и сигнальными входами выходных цепей; a также тем, что датчик уровня помехи содержит два полосовых фильтра, два амплитудных детектора, узел суммирования и фильтр нижних частот, причем входом датчика являются соединенные между собой входы полосовых фильтров, выходом датчика является выход фильтра нижних частот, выходы полосовых фильтров через амплитудные детекторы соединяются с входами узла суммирования, выход которого соединяется с входом фильтра нижних частот;
а также тем, что формирователь компенсирующего сигнала содержит соединенные последовательно фазовращатель, перемножитель и узел суммирования, второй перемножитель, вход которого соединен с входом фазовращателя а выход соединен с вторым входом узла суммирования, вход каждого из перемножителей соединен с управляющим входом того же перемножителя через соединенные последовательно коррелятор, различитель полярности, реверсивный счетчик и преобразователь код-напряжение, элемент И и генератор импульсов, соединенный через элемент И со счетными входами реверсивных счетчиков, причем первым, вторым и третьим входами блока являются, соответственно, вход фазовращателя, второй вход элемента И и соединенные между собой вторые входы корреляторов, а выходом блока является выход узла суммирования;
а также тем, что выходные цепи содержат детектор, видеоусилитель, индикатор кругового обзора, узел развертки и М индикаторов ориентации компенсационных антенн, причем выход детектора соединен с входом видеоусилителя, выход которого соединен с сигнальным входом индикатора кругового обзора, связанного с узлом развертки, вход запуска и управляющий вход которого являются соответствующими входами выходных цепей, основным сигнальным входом которых является вход детектора, а M дополнительными сигнальными входами являются входы M индикаторов ориентации компенсационных антенн.
Введенные признаки остронаправленности диаграмм компенсационных антенн совместно с датчиками ориентации антенн и соответствующими связями формируют раздельные сигналы помех, пришедших с различных азимутов, для последующей обработки в устройстве.
Введенные разделители поляризаций, дополнительные приемники и формирователи компенсирующих сигналов устраняют имеющееся обычно ограничение в достижимом коэффициенте подавления помехи из-за различия в поляризационных характеристиках основной и компенсационных антенн.
Остронаправленность компенсационных антенн, дополнительные приемники и ФКС, выполненные указанным образом, вырабатывают сигнал компенсации раздельно по каждой помехе. При этом точность работы ФКС существенно повышается, так при перемножении сигналов в корреляторах ФКС в одном из перемножаемых сигналов отсутствуют (или существенно ослаблены) помехи, по которым работают другие ФКС, и которые в известном устройстве дают множество комбинационных частот, являющихся помеховыми для работы устройства в целом.
Введенные датчики уровней помехи и пороговые узлы в основной и компенсационные каналы, остронаправленность компенсационные каналы, остронаправленность компенсационных антенн, введенные узлы суммирования, коммутаторы, логические элементы И, ИЛИ подключают выходные сигналы компенсационных каналов к сумматору основного приемного канала только на интервалах времени, когда уровень помех в основном канале превышает установленный пороговый, и только тех каналов, антенны которых ориентированы на источники помех, уровни которых в данный момент превышают установленный в качестве другого порога. При этом автоматически исключаются из общего выходного сигнала те составляющие шумы, которые связаны с собственными шумами компенсационных каналов, где в данный момент помеха отсутствует.
Указанное выполнение ФКС совместно с остальными признаками устройства автоматически подключает ФКС на выработку сигналов управления весовыми коэффициентами при наличии помехи с данного направления, и точное запоминание выработанных ранее весовых коэффициентов при исчезновении помехи из-за скольжения по частоте и т.п. При этом исключается возможность перехода формирователей компенсационных сигналов радиолокатора в режим непрерывных переходных процессов при работе по нестационарным помехам и связанное с этим существенное снижение помехоустойчивости радиолокатора. При кратковременном исчезновении помехи ФКС только прерывает процесс корреляционной автоматической подстройки, и продолжает его с той же точки сразу же при новом появлении помехи с того же направления. При этом процессе авторегулирования имеет возможность практически завершиться, что обеспечивает максимальное подавление помехи.
Введенные датчики ориентации компенсационных антенн и узлы совпадения совместно с указанным выполнением ФКС, наличием датчика ориентации основной антенны и соответствующих связей исключают нарушение работоспособности при совпадении направлений луча основной антенны и компенсационных антенн.
Выходные цепи, выполненные указанным образом, дают оператору информацию о направлениях на источники помех и о ориентации компенсационных антенн, что позволяет направить компенсационные антенны на обнаруженные источники помехи и тем самым обеспечить подавление помех.
Датчики уровней помехи, выполненные указанным образом, дают уровень помехи не в сигнальной полосе радиолокатора, а в полосах, непосредственно прилегающих к ней, с двух сторон. При этом исключается влияние на точность выдаваемой датчиком информации отраженных зондирующих сигналов, уровень которых в сигнальной полосе обычно велик. Точность же измерения уровня самой шумовой помехи практически не снижается, так как она создается всегда в несколько (по крайней мере в 3 раза) шире, чем сигнальная полоса, с целью учесть возможную ошибку наведения помехи по частоте. Поэтому информация о плотности помехи в указанных прилегающих полосах вполне характеризует уровень помехи.
Известно техническое решение, в котором имеются признаки, сходные с признаками, отличающими заявляемое решение от прототипа (см. Хансен В.Г. Логика последовательной работы обзорной РЛС с поимпульсной перестройкой частоты - "Зарубежная радиоэлектроника", 1969, №4, ст. 80-98).
В этом устройстве осуществляется перестройка по частоте в том случае, когда уровень помехи на рабочей частоте превысит установленный предел. Это устройство имеет датчик уровня помехи, вход которого соединен с выходом приемника, и пороговый узел, вход которого соединен с выходом датчика уровня помехи. Эти признаки являются общими с отличительными признаками предлагаемого устройства.
Однако в предлагаемом устройстве имеется ряд других отличительных признаков; формирователи компенсирующего сигналов, разделители поляризации, датчики ориентации антенны, коммутаторы, узлы суммирования, логические элементы И, ИЛИ, узлы совпадения и соответствующие связи. Оба эти устройства обеспечивают борьбу с активными помехами, однако если известное устройство борется с помехами (в основном узкополосными) путем попытки отстроиться от них по частоте, то в предлагаемом устройстве решается задача корреляционной автоматической компенсации любых типов активных помех, выступающих по боковым лепесткам.
Таким образом, хотя предлагаемое устройство и имеет некоторые общие признаки с упомянутым устройством, имеются и ряд существенных различий. Устройства работают различным образом, решают разные задачи, обеспечивают достижение разных эффектов.
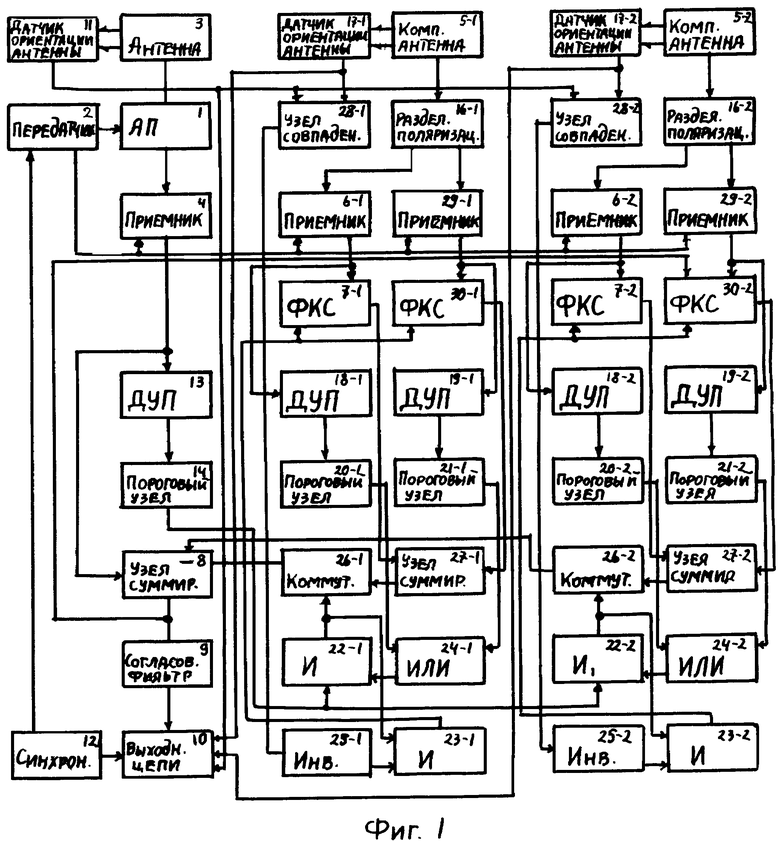
На фиг. 1 представлена функциональная схема предлагаемого радиолокатора.
На фиг. 2 представлена функциональная схема датчика уровня помехи.
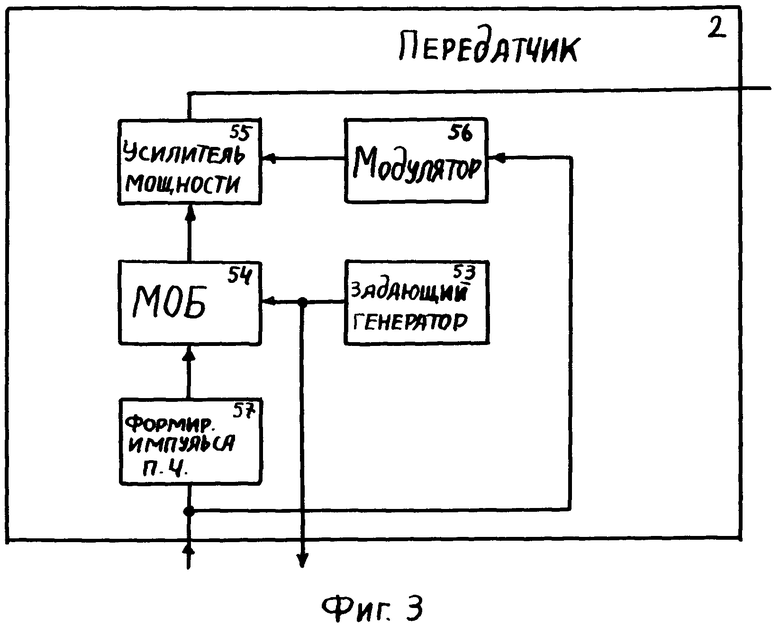
На фиг. 3 представлена функциональная схема передатчика.
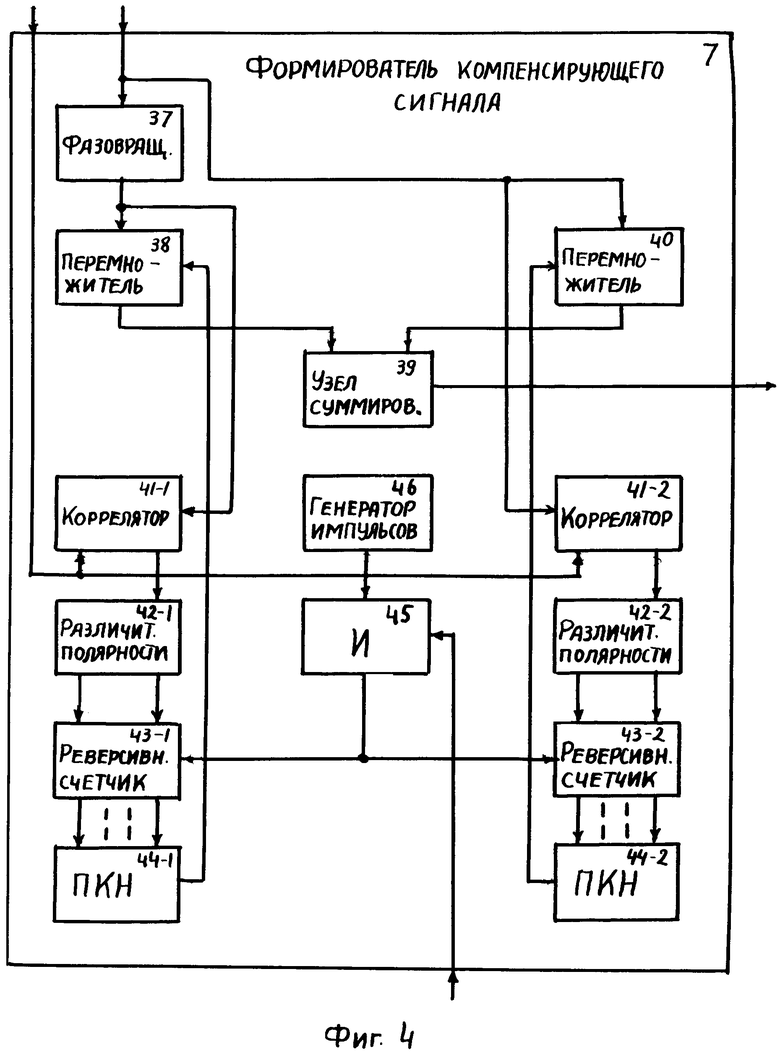
На фиг. 4 представлена функциональная схема формирователя компенсирующего сигнала.
Предлагаемый радиолокатор содержит связанные через антенный переключатель 1 передатчик 2, антенну 3 и основной приемник 4, M компенсационных каналов, содержащих компенсационную антенну 5, приемник 6 и формирователь 7 компенсационного сигнала, вход которого соединен с выходом приемника 6, соединенные последовательно узел суммирования 8, согласованный фильтр 9 и выходные цепи 10, датчик ориентации антенны 11, синхронизатор 12, первый выход которого соединен с входом запуска выходных цепей 10, а второй выход соединен с входом запуска передатчика 2, второй выход которого соединен с гетеродинными входами приемников 4 основного и всех компенсационных каналов, причем вход датчика ориентации антенны 11 связан с основной антенной 3, а его выход соединен с управляющим входом выходных целей 10, при этом первый вход узла суммирования 8 соединен с выходом основного приемника 4, а его выход соединен с опорными входами ФКС всех компенсационных каналов.
Предлагаемый радиолокатор содержит также датчик 13 уровня помехи, вход которого соединен с выходом основного приемника 4, пороговый узел 14, вход которого соединен с выходом датчика 13 уровня помехи, а каждый компенсационный канал содержит разделитель поляризации 16, датчик 17 ориентации антенны, два датчика 18, 19 уровня помехи, два пороговых узла 20, 21, два элемента И 22, 23, элемент ИЛИ 24, инвертор 25, коммутатор 26, узел 27 суммирования, узел 28 совпадения и дополнительные приемник 29 и ФКС 30, сигнальный и опорный входы которого соединены, соответственно, с выходом дополнительного приемника 29 и с опорным входом первого ФКС 7, выходы обоих ФКС 7, 30 соединены с входами узла 27 суммирования, выход которого соединен с сигнальным входом коммутатора 26, выход которого соединен с соответствующим инверсным входом узла 8 суммирования основного канала, а управляющий вход соединен с выходом элемента И 22 и первым входом элемента И 23, выход которого соединен с управляющими входами обоих ФКС 7, 30, а второй вход через инвертор 25 соединен с выходом узла совпадения 28, первый вход которого соединен с выходом датчика 11 ориентации основной антенны, а второй вход соединен с выходом датчика 15 ориентации антенны, связанного с компенсационной антенной данного канала, сигнальный выход которой соединен с входом разделителя поляризаций 16, выходы которого соединены с сигнальными входами приемников 6, 29, выходы которых через соответствующие датчики 18, 19 уровня помехи и пороговые узлы 20, 21 соединены с входами элемента ИЛИ 24, выход которого соединен с первым входом первого элемента И 22, второй вход которого соединен с выходом порогового узла 14 основного канала, причем гетеродинные входы обоих приемников 6, 29 соединены между собой, а выходы датчиков 17 ориентации антенн всех компенсационных каналов соединены с дополнительными двумя сигнальными входами выходных цепей 10.
Датчики 13, 18, 19 уровня помехи содержат два полосовых фильтра 31, 32, два амплитудных детектора 33, 34, узел 35 суммирования и фильтр 36 нижних частот, причем входом датчика уровня помехи являются соединенные между собой входы полосовых фильтров 31, 32, выходом этого датчика является выход фильтра 36 нижних частот, выходы полосовых фильтров через амплитудные детекторы 33, 34 соединены с входами узла 35 суммирования, выход которого соединен с вводом фильтра 36 нижних частот.
Формирователь 7 компенсирующего сигнала содержит соединенные последовательно фазовращатель 37 перемножитель 38 и узел 39 суммирования, второй перемножитель 40, вход которого соединен с входом фазовращателя 37, а выход соединен с вторым входов узла суммирования 39, вход каждого из перемножителей 38, 40 соединен с управляющим входом того же перемножителя (38 или 40) через соединенные последовательно коррелятор 41, различитель 42 полярности, реверсивный счетчик 43 и преобразователь код-напряжение 44, элемент И 45, генератор импульсов 46, соединенный через элемент И 45 со счетными входами реверсивных счетчиков 43, причем первым, вторым и третьим входами формирователя 7 являются, соответственно, вход фазовращателя 37, второй вход элемента И 45 и соединенные между собой вторые входы корреляторов 41, а выходом формирователя 7 является выход узла суммирования 39.
Выходные цепи 10 содержат детектор 47, видеоусилитель 48, индикатор кругового обзора 49, узел развертки 50 и два индикатора ориентации 51, 52 компенсационных антенн, причем выход детектора 47 соединен с входом видеоусилителя 48, выход которого соединен с сигнальным входом индикатора 49 кругового обзора, связанного с узлом развертки 50, вход запуска и управляющий вход которого являются соответствующими входами выходных цепей 10, основным сигнальным входом которых является вход детектора 47, а первым и вторым дополнительными сигнальными входами являются входы индикаторов 51, 52 ориентации компенсационных антенн.
Антенный переключатель 1 выполнен в виде ферритового циркулятора.
Передатчик 2 - обычный передатчик усилительного типа. Он содержит соединенные последовательно задающий генератор 53, модулятор одной боковой полосы 54 и усилитель мощности 55. Передатчик 2 содержит также модулятор 56 и формирователь импульса промежуточной частоты 57. Выход формирователя импульса промежуточной частоты 5 соединен с вторым входом модулятора одной боковой полосы 54, а вход этого формирователя, соединенный с входом модулятора 56, является входом запуска передатчика 2, первым и вторым выходами которого являются, соответственно, выход усилителя мощности 55 и выход задающего генератора 53.
Задающий генератор 53 выполнен в виде кварцевого генератора и варакторного умножителя частоты. Кварцевый генератор выполнен на микросхеме 235 ХА6, частота его выходного сигнала равна 50 МГц. Варакторный умножитель частоты имеет общий коэффициент умножения равный 96.
Формирователь 37 импульса промежуточной частоты выполнен на дисперсионной линии задержки со средней частотой 45 МГц, полосой пропускания 3 МГц, крутизной дисперсионной характеристики + 5 мкс/МГц. В состав формирователя 37 входят также заторможенный генератор короткого импульса промежуточной частоты 45 МГц (длительностью 0,1 мкс), выполненный на микросхеме 235 ХА6, и усилитель промежуточной частоты на микросхемах 235 УР2, компенсирующие потери в дисперсионной линии задержки. Входом формирователя 7 является вход заторможенного генератора короткого импульса промежуточной частоты, а выходом - выход компенсирующего УПЧ, вход которого соединен с выходом дисперсионной линии задержки. Короткий импульс, формируемый при каждом запуске узла, имеет ширину спектра порядка 10 МГц, из которого дисперсионная линия задержки выделяет 3 МГц и вводит в спектральные составляющие разовые сдвиги, в результате которых на выходе формирователя 7 появляется сигнал с линейной частотной модуляцией. Частота наполнения этого импульса изменяется от 43,5 46,5 МГц за время длительности импульса 15 мкс.
Модулятор одной боковой полосы диодного типа, переносит сигнал промежуточной частоты на частоту, равную сумме частот сигналов, поступающих на два его входа.
Усилитель мощности 55 выполнен в виде соединенных последовательно лампы бегущей волны и амплитрона.
Модулятор 56 тиристорного типа, обеспечивает импульсный режим работы усилителя мощности 55.
Антенна 3 - зеркального типа, работает в режиме кругового обзора. Связанный с ней датчик 11 ориентации антенны - обычный преобразователь типа вал-код.
Приемник 4 содержит соединенные последовательно смеситель и УПЧ. Смеситель балансного типа, выполнен на СВЧ диодах типа Д-405. Сигнальный и гетеродинный входы смесителя являются соответствующими входами приемника 4. Выходом приемника 4 является выход УПЧ, вход которого соединен с выходом смесителя. УПЧ имеет полосу пропускания 4 МГц, среднюю частоту полосы пропускания 45 МГц. Выполнен он на микросхема 235 УР2.
Компенсационные антенны 5 (5-1 и 5-2, так как рассматривается вариант реализации с двумя компенсационными каналами) зеркального типа с диаграммой направленности в вертикальной плоскости типа косеканс до угла 40 градусов. Ширина главного лепестка диаграммы направленности в горизонтальной плоскости составляет 10 градусов по уровню - 3 дБ. Волноводы используются круглые, обеспечивающие прием сигналов любой поляризации.
Приемника 6 выполнены так же, как и приемник 4. В формирователях компенсирующего сигнала 7, 30 фазовращатель 37 имеет фазовый сдвиг 90°. Узел суммирования 39 выполнен на микросхеме 235 УР2, имеет полосу пропускания 10 МГц со средней частотой 45 МГц. Корреляторы 41 выполнены в виде аналогового перемножителя сигналов на микросхеме 174 ПС1 и фильтра нижних частот на его выходе. Фильтр нижних частот имеет полосу пропускания 1 кГц.
Различитель полярности 42 выполнен в виде пары диодов типа Д9 и инвертора. Входом различителя полярности 42 являются соединенные между собой разнополярные входы двух диодов. Выход первого из диодов является первым выходом узла 42, вторым его выходом является выход инвертора, вход которого соединен с выходом второго диода. При этом в зависимости от полярности сигнала на входе узла сигнал появляется на одном или другом его выходе, причем с одинаковой полярностью, требуемой для управления последующими узлами формирователя 7.
Реверсивный счетчик 43 десятиразрядный, выполнен на микросхемах 133 РУ П. Счетным входом его является вход, связанный через элемент И 45 с генератором импульсов 46. Два других входа задают направление счета (суммирование или вычитание). Преобразователь код-напряжение также десятиразрядный, выполнен на микросхемах 572. Элемент И 45 выполнен на микросхеме 133 РУ П. Генератор импульсов 46 генерирует импульсы длительностью 0,1 мкс с частотой повторения 300 кГц.
Перемножители 38, 40 выполнены на микросхеме 174 ПС 1. Выходное напряжение ПКН 44 двуполярное, нулевое выходное напряжение соответствует среднему положению счетчика 43.
Узел суммирования 8 выполнен на микросхемах 235 УР 2. Один вход его (связанный с выходом приемника 4) является прямым (не изменяющем полярность сигнала при прохождении его на выход узла суммирования), а остальные - инверсными (изменяющими полярность, что обеспечивает их вычитание относительно сигналов, поступающих с первого входа).
Согласованный фильтр 9 выполнен на дисперсионной линии задержки с полосой пропускания 3 МГц, средней частотой полосы пропускания 45 МГц, крутизной дисперсионной характеристики - 5 МКС/МГц. Этот фильтр является согласованным с сформированным в передатчике 2 импульсом с ЛЧМ модуляцией.
В выходных цепях 10 детектор 47 амплитудный, выполнен на диоде Д9. Видеоусилитель 48 имеет полосу пропускания 3 МГц, выполнен на микросхемах 235 УР 2. Индикатор кругового обзора 49 выполнен на электронно-лучевой трубке. Блок развертки 50 обычного типа обеспечивают линейную радиальную развертку луча ИКО 49 путем формирования линейно изменяющихся токов в отклоняющий системе. Индикаторы 51, 52 цифрового типа, индицируют градусы, задаваемые датчиками 17.
Пороговые узлы 14, 20, 21 выполнены в виде триггеров Шмидта на микросхемах 133 РУ П.
Пороговые уровни в узлах 11, 20, 21 установлены на уровне +5 дБ относительно собственных шумов приемников в точках установки узлов.
Синхронизатор 12 выполнен на микросхемах 133 РУ П. Он формирует запускающие импульсы длительностью 0,1 мкс с частотой повторения 1 кГц. На втором выходе синхронизатора имеются такие же импульсы и с той же частотой повторения, но запаздывающие относительно первых на 15 мкс (на время длительности сформированного в передатчике 2 зондирующего импульса).
В датчиках 13, 18, 19 уровня помехи полосовые фильтры 31, 32 имеют полосу пропускания по 2 МГц, а средние частоты, соответственно, 41,5 и 48,5 МГц. Амплитудные детекторы 33, 34 выполнены на диодах Д9, узел суммирования 35 выполнен на микросхеме 235 УР 2. Фильтр нижних частот 36 имеет полосу пропускания 100 кГц.
Датчики 17 ориентации антенны - обычные преобразователи вал-код.
Блок 15 управления антенной - обычная сельсинная линия, причем сельсин-датчик установлен на пульте оператора, а сельсин-приемник - на компенсационной антенне 5.
Разделитель поляризации 16 выполнен в виде обычного трехканального турникетного соединения и круглым волноводом (см., например, Д.Б. Канарейкин и др. Поляризация радиолокационных сигналов, "Сов. радио", М., 1966 г., стр. 345, рис. 11, 24). Оно представляет собой волноводно-коаксиальное устройство, в котором соединены высокочастотные линии с различными типами волн. Круглый волновод турникетного соединения является входом разделителя поляризации, выходами являются пары противоположных выходов прямоугольных волноводов, они соединяются с входами смесителей преемника. Гетеродинный сигнал в данном варианте исполнения подается на смесители преемника через коаксиальный вход турникетного соединения.
Логические элементы И 22, 23, ИЛИ 24, инверторы 25 выполнены на микросхемах 133 РУ П.
Коммутаторы 26 выполнены на микросхемах 143. Узлы суммирования 27 выполнены на микросхемах 235 УР 2. Узлы совпадения 28 выполнены на микросхемах 133 РУ П. Приемники 29 выполнены так же, как приемник 4.
Работает предлагаемый радиолокатор следующим образом. Синхронизатор 12 импульсом с первого своего выхода запускает передатчик 2, где формируется мощный СВЧ импульс с ЛЧМ модуляцией. Этот импульс через антенный переключатель 1 поступает в антенну 3, излучается, далее осуществляется прием отраженных сигналов, сжатие их в фильтре 9 и подача на индикатор кругового обзора.
Если при этом отсутствуют помехи, то получаемый в датчике 13 уровня помехи сигнал не превышает порога в узле 14, нулевой выходной сигнал узла 14 через элементы И 22-1, 22-2 запирает коммутаторы 26-1, 26-2, в результате все цепи компенсационных каналов от основного канала отключают, что устраняет возможность попадания собственных шумов их приемников в основный приемный тракт радиолокатора.
Появление на выходе датчика 13 сигнала, превышающего порог в узле 14, свидетельствует о необходимости включения цепей компенсации помехи. При этом подключается только тот компенсационный канал, антенна которого направлена на источник помехи. Соответствующий датчик уровня помехи и пороговый узел через элемент ИЛИ 24-1 или 24-2 и соответствующие элементы И 22-1, И 22-2 включают коммутатор 26-1 или 26-2.
Принимаемый компенсационной антенной сигнал помехи для компенсации помехи в основном приемном тракте должен подаваться на инверсный вход узла 8 с такой амплитудой и фазой, при которой уровень помехи на выходе узла 8 будет минимальной.
Для обеспечения возможности получения компенсирующего сигнала с любой требуемой фазой (0-360°) в узлах ФКС 7, 30 осуществляется квадратурная обработка, из входного сигнала при помощи фазовращателя 37 формируют второй сигнал, сдвинутый относительно первого по фазе на 90°. Изменение выходного сигнала ПКН 44 приводит к изменению сигнала на выходе перемножителя 38 (или 40). Если изменяется только величина управляющего напряжения, то изменяется только амплитуда сигнала на выходе перемножителя. Если же изменяется знак управляющего напряжения, то фаза сигнала на выходе перемножителя скачкообразно изменится на 180°. Так как идет раздельное управление двумя сигналами, взаимно сдвинутыми на 90°, то фаза сигнала на выходе узла суммирования 39, являющегося векторной суммой поступающих на его вход сигналов, может изменяться в требуемых пределах 0-360° и изменяться по амплитуде.
Для выработки управляющих узлами перемножителей сигналов используется корреляционный метод. Помехи из тракта основного приемника перемножается в узлах 41 с сигналами помехи, принятой по компенсационной антенне.
При перемножении коррелированных помех (одной и той же помехи, принятой разными антеннами и отличающихся амплитудами и фазами), на выходе корреляторов появляется низкочастотное напряжение (прошедшее через фильтр нижних частот коррелятора). Полярность этого напряжения связана со сдвигом фаз помех, она используется для задания (в различителе полярности 42) направления перестройки счетчика 43. Перестройка счетчиков 43-1, 43-2 в нужном направлении изменяет управляющее напряжение на перемножителях 38, 40 так, чтобы уравнять фазы и амплитуды взаимокомпенсируемых помех, и тем самым подавить их.
Если помеха исчезает, то автоматически снимается разрешающее работу напряжение с элемента И 45 ФКС 7(30). При этом выработанные управляющие напряжения запоминаются вплоть до нового появления помехи. Компенсация вновь появившейся помехи будет осуществляться сразу же, без переходных процессов настройки, что повышает помехозащищенность. Так как отсутствует в этом режиме переходные процессы, то можно увеличить постоянную времени фильтра коррелятора (уменьшить полосу пропускания), тем самым более точно вырабатывать усредненное управляющее напряжение, что повысит коэффициент подавления помехи.
Осуществляется подавление помех, поступающих по боковым лепесткам диаграммы направленности основной антенны. Когда же основная антенна в процессе сканирования направляется на источник главным лепестком, что определяется по совпадению кодов в узлах 28, то соответствующий компенсационный канал автоматически отключается на время этого совпадения, с запоминанием выработанных ранее сигналов управления. Это исключает возможность сбоя системе при совпадении лучей антенн при сканировании.
В общем случае поляризация основной и компенсационных антенн различны во всех известных радиолокаторах, что ограничивает достижимый коэффициент подавления помехи обычно на уровне не лучше 20 дБ. В описываемом радиолокаторе компенсационные антенны осуществляют прием двух ортогональных составляющих, разделение их и раздельную автокомпенсацию. При этом указанное ограничение (на уровне 20 дБ) снимается, что является повышением помехозащищенности.
Оценим эффективность применения предлагаемого радиолокатора в условиях воздействия нестационарных помех.
Рассмотрим случай работы двух разнесенных в пространстве станций помех в режиме постановки скользящих по частоте помех со скважность 2 с частотой повторения 1 кГц. Предположим, что периоды скольжения в обеих станциях помех равны, а одна помеха воздействует на радиолокатор когда исчезает (из-за расстройки по частоте) другая помеха.
Зададимся экспоненциальной формой изменения управляющего напряжения в автокомпенсаторе известной РЛС (самый распространенный случай).
Коэффициент подавления помехи по мощности равен отношению мощностей помехи в случаях отсутствия и наличия автокомпенсации, т.е.

В реальных автокомпенсаторах K даже при большом времени регулирования не превышает величину порядка 25-30 дБ, что связано с нестабильностью параметров элементов аппаратуры и другими причинами.
При наличии переходных процессов в автокомпенсаторе Kп будет изменяться в больших пределах и для оценки характеристик автокомпенсатора следует пользоваться усредненным во времени коэффициентом подавления
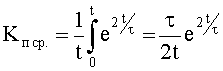
где τ - постоянная времени автокомпенсатора;
t - время переходного процесса.
Рассчитанная по этой формуле зависимость среднего коэффициента подавления помехи от отношения времени переходного процесса к постоянной времени автокомпенсатора в известном радиолокаторе представлена в таблице 1.
В известном приемнике постоянная времени автокомпенсатора имеет величину порядка 200 мкс.
При указанных параметрах станций помех время регулирования составляет величину, равную половине периода скольжения, т.е.
t=50 мкс.
Соответственно по таблице 1 средний коэффициент подавления помехи для случая
t/τ=0,25
составит 3,7 ДБ.
В предлагаемом радиолокаторе переходной процесс не изменяет своего направления при кратковременном исчезновении помехи, а только прерывает его, запоминая выработанные управляющее напряжения до возобновления поступления помехи, после чего процесс регулирования продолжается, а не начинается с нуля. В результате переходный процесс все время идет в одну сторону, процесс регулирования достаточно быстро завершается практически полностью, достигается коэффициент подавления помехи порядка 30 ДБ.
При этом выигрыш в коэффициенте подавления нестационарной помехи составит
30 ДБ - 3,7 ДБ = 26,3 ДБ.
Из приведенных цифр следует, что известный радиолокатор практически полностью неработоспособен при воздействии нестационарных помех (т.к. подавление помехи на 3,7 ДБ недостаточно), а предлагаемый радиолокатор обеспечивает требуемую для нормальной работы степень подавления помехи. Выигрыш в коэффициенте подавления помехи по мощности составляет 425 раз.
Процессы регулирования в предлагаемом радиолокаторе идут одновременно и независимо для нескольких (M) помех, при этом точность компенсации обеспечивается практически такая же, как и в случае одиночной стационарной помехи.
Известные радиолокаторы с подавлением помех, поступающих по боковым лепесткам, обычно работает по 1-2 помехам, причем стационарным во времени.
Описанный вариант реализации радиолокатора может работать по 2 помехам, причем и нестационарным. Допускается увеличение количества подавляемых помех путам некоторого усложнения аппаратуры.
Это позволяет обеспечить работоспособность аппаратуры в реальных современных помеховых условиях, включая применение противником забрасываемых передатчиков помех, нестационарных помех типа скользящих по частоте, мерцающих, т.е. решить возникшую в последние годы острую проблему радиолокации.
Недостатки известных радиолокаторов рассмотрены применительно к аппаратуре с зеркальными антеннами как наиболее широко распространенной. Однако практически все указанные недостатки имеются в перспективных дорогостоящих радиолокаторах с ФАР.
Применение предлагаемых принципов построения радиолокатора в аппаратуре с ФАР может исключить проблему формирования нулей в направлении на источник помех в приемной диаграмме направленности ФАР, тем самым исключить очень большой объем оперативных вычислений из алгоритма работы вычислительного комплекса радиолокатора, что в настоящее время может быть очень полезным.
Таким образом, предлагаемый радиолокатор является, по существу единственным, обеспечивающим работоспособность в современных помеховых условиях.
Он обеспечивает подавление практически всех активных помех, поступающих с М направлений по боковым лепесткам антенны, причем как стационарных, так и нестационарных (шумовых заградительных, скользящих, ответных, импульсных хаотических, имитационных, непрерывных синусоидальных и т.п.)
Он может быть использован в создаваемых радиолокаторах с зеркальными системами, в системах с ФАР, может быть выполнен в виде приставки к находящимся в эксплуатации системам.
Предлагаемый радиолокатор может быть применен как радиолокатор обнаружения целей, радиолокатор управления оружием и т.п. причем как с импульсным, так и с непрерывным излучением.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР С КОГЕРЕНТНОЙ АВТОКОМПЕНСАЦИЕЙ ШУМОВЫХ ПОМЕХ, ПРИНЯТЫХ ПО БОКОВЫМ ЛЕПЕСТКАМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1991 |
|
SU1841075A1 |
| РАДИОЛОКАТОР | 1984 |
|
SU1841061A1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1991 |
|
SU1841076A1 |
| РАДИОЛОКАЦИОННОЕ ПРИЕМНОЕ УСТРОЙСТВО | 1984 |
|
SU1841013A1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1985 |
|
SU1840927A1 |
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| КОРРЕЛЯЦИОННЫЙ АВТОКОМПЕНСАТОР ПОМЕХ | 1984 |
|
SU1841059A1 |
| ДВУХЧАСТОТНЫЙ КОГЕРЕНТНО-КОРРЕЛЯЦИОННЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2332681C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1979 |
|
SU1840912A1 |

Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах для защиты от помех. Достигаемый технический результат - повышение эффективности подавления помех. Указанный результат достигается за счет того, что приемо-передающее устройство содержит основной канал, содержащий антенну, антенный переключатель, приемник и сумматор, содержит также передатчик, датчик угла положения антенны, М компенсационных каналов, каждый из которых содержит первый приемник и первый формирователь сигнала, при этом в основной канал введены измеритель уровня помех и пороговый блок, в каждый компенсационный канал введены поляризационный разделитель сигналов, второй приемник, второй формирователь сигнала, сумматор, ключ, первый измеритель уровня помехи, первый пороговый блок, элемент ИЛИ, первый элемент И, второй измеритель уровня помехи, второй пороговый блок, блок совпадения, инвертор, второй элемент И. Все перечисленные средства определенным образом соединены между собой. 1 з.п. ф-лы, 4 ил.
1. Приемо-передающее устройство радиолокатора, состоящее из основного канала, содержащего последовательно соединенные антенну, антенный переключатель, приемник и сумматор, передатчик, выход которого соединен с третьим плечом антенного переключателя и датчик угла положения антенны, вход которого соединен с управляющим выходом антенны, и М компенсационных каналов, каждый из которых содержит антенну и последовательно соединенные первый приемник и первый формирователь сигнала, причем второй выход передатчика соединен с опорными входами приемника основного канала и первых приемников М компенсационных каналов, выход сумматора основного канала соединен с опорными входами первых формирователей сигнала М компенсационных каналов и является выходом приемно-передающего устройства, отличающееся тем, что, с целью повышения эффективности подавления помех, принятых по боковым лепесткам диаграммы направленности антенны, в основной канал введены последовательно соединенные измеритель уровня помех и пороговый блок, причем выход приемника соединен с входом измерителя уровня помехи, а в каждый из М компенсационных каналов введены, поляризационный разделитель сигналов, последовательно соединенные второй приемник, второй формирователь сигнала сумматор и ключ, последовательно соединенные первый измеритель уровня помехи, первый пороговый блок, элемент ИЛИ и первый элемент И, выход которого соединен с управляющим входом ключа, последовательно соединенные второй измеритель уровня помехи и второй пороговый блок, выход которого соединен с вторым входом элемента ИЛИ, и последовательно соединенные датчик утла положения антенны, блок совпадения, инвертор и второй элемент И, выход которого соединен с управляющими входами первого и второго формирователей сигнала, причем управляющий выход антенны соединен с входом датчика угла положения антенны, выход антенны соединен через поляризационный разделитель сигналов с входами первого и второго приемников, выходы которых соединены соответственно с входами первого и второго измерителей уровня помехи, выход первого формирователя сигнала соединен с вторым входом сумматора, выход первого элемента И соединен с вторым входом второго элемента И, при этом второй выход передатчика соединен с опорными входами вторых приемников М компенсационных каналов, выход датчика угла положения антенны основного канала соединен с вторыми входами блоков совпадения М компенсационных каналов, выход сумматора основного канала соединен с опорными входами вторых формирователей сигнала М компенсационных каналов, выходы ключей М компенсационных каналов соединены с М инверсными входами сумматора основного канала и выход порогового блока основного канала соединен с вторыми входами первых элементов И М компенсационных каналов.
2. Приемо-передающее устройство по п. 1, отличающееся тем, что формирователь сигнала содержит последовательно соединенные фазовращатель на 90°, первый перемножитель и сумматор, выход которого является выходом формирователя сигнала, второй перемножитель, выход которого соединен с вторым входом сумматора, два коррелятора, первые входы которых соединены и являются опорным входом формирователя сигнала, два селектора импульсов по полярности, два реверсивных счетчика, два преобразователя код-напряжение, выходы которых соединены с вторыми входами первого и второго перемножителей, и последовательно соединенные генератор импульсов и элемент И, выход которого соединен с управляющими входами первого и второго реверсивных счетчиков, причем выход и вход фазовращателя на 90° соединен с вторыми входами первого и второго корреляторов, выходы которых соединены с входами первого и второго селекторов импульсов по полярности, первый и второй входы каждого из которых соединены соответственно с первым и вторым входами соответствующего реверсивного счетчика, а выходы первого и второго реверсивных счетчиков соединены с входами первого и второго преобразователей код-напряжения, при этом вход фазовращателя на 90° и второй вход элемента И являются входом и управляющим входом формирователя сигнала.
| «Теоретические основы радиолокации», под ред | |||
| В.Е | |||
| Дулевича, М.: Сов | |||
| радио, 1978 г., с.458. |

