Изобретение относится к радиолокации, в частности к защите радиолокационных станций (РЛС) от активных шумовых помех (АШП) с применением устройств автокомпенсации.
Рассматриваются импульсные РЛС, у которых в качестве антенной системы используется антенная решетка (АР) с электронным сканированием луча, т.е. электронным сканированием диаграммы направленности антенны (ДНА), при помощи цифровых фазовращателей, расположенных в каждом дипольном канале АР, содержащие диаграммообразующую систему (ДОС) основного приемного канала, ДОС компенсационных приемных каналов и автокомпенсатор (АК), который может быть реализован аппаратным или программным способом. При этом автокомпенсаторы могут быть любого типа: гетеродинного или квадратурного, в аналоговом или цифровом исполнении, работающие на высокой частоте или на промежуточной, с корреляционными обратными связями или (для цифрового исполнения) с прямым вычислением весовых коэффициентов в соответствии с формулой Винера-Хопфа

где Wопт - вектор адаптивных весов (вектор весовых коэффициентов);
Rnn - ковариационная матрица помех в компенсационных каналах;
В - корреляционный вектор-столбец основного и компенсационных приемных каналов, ("Радиоэлектронные системы. Основы построения и теория". Справочник. / Под ред. проф. Я.Д.Ширмана. М.: ЗАО "МАКВИС", 1998, с.704-708).
Известно, что все виды автокомпенсаторов имеют один общий недостаток - ограниченный коэффициент подавления (Кподав.) порядка 25 дБ. Ограничение коэффициента подавления связано с непреодолимыми (как показала практика) трудностями получения амплитудно-частотной и фазовой идентичности основного и компенсационных приемных каналов, которая определяет величину коэффициента корреляции (ρ), а следовательно, и коэффициент подавления, который зависит от значения коэффициента корреляции. Например, для одноканального автокомпенсатора эта зависимость выражается формулой:
Ограничение коэффициента подавления особенно нежелательно, когда уровень помех имеет большой динамический диапазон. После устройства автокомпенсации при ограничении подавления остается еще достаточно высокий уровень неподавленного шума, который способен существенно сократить дальность обнаружения РЛС. Кроме того, при большом уровне активных шумовых помех в автокомпенсаторах гетеродинного или квадратурного типа, имеющих корреляционную обратную связь, возникает неустойчивость, которая также уменьшает коэффициент подавления автокомпенсатора.
Возможны различные способы усовершенствования систем автокомпенсации с расширенным динамическим диапазоном частот.
Многоканальный автокомпенсатор (МАК) с улучшенным динамическим диапазоном представлен в патенте США №3938154 "Усовершенствованная система подавления боковых лепестков", МПК Н 04 В 7/00, НКИ 343-100 LE, заявка №499374 от 16.08.1974 г., опубликованном 10.02.1976 г. В запатентованной системе используется последовательное соединение колец слежения. Достоинством схемы является существование такого положения, при котором в каждом кольце слежения "действует" одна помеха. Этим обеспечивается устойчивость работы МАК, а эффективность подавления может быть увеличена наращиванием ступеней итерации.
В патенте США №4086592 "Устройство подавления боковых лепестков", МПК G 01 S 9/42, Н 04 В 1/12, НКИ 343-100 LE, заявка №818180 от 22.07.1977 г., опубликованном 25.04.1978 г., независимость работы устройства от мощности сигнала помехи обеспечивается тем, что компенсатор построен по разомкнутой схеме. Схема компенсатора реализована на базе цифровой техники.
В патенте США №4119963 "Когерентное устройство подавления боковых лепестков для импульсных РЛС", МПК G 01 S 9/233, НКИ 343-17.2 PC, заявка №782930 от 30.03.1977 г., опубликованном 10.10.1978 г. (приоритет Netherlands №7603559 от 06.04.1976 г.), увеличение динамического диапазона по помехе обеспечивается введением на основном и компенсационных входах автокомпенсатора блоков с амплитудной характеристикой y=xα, например, логарифмических усилителей. Однако, хотя использование логарифмических усилителей и приводит к расширению динамического диапазона при больших уровнях помехи, ввиду декорреляции шума нелинейными устройствами в основном и компенсационных приемных каналах, получить хорошее подавление помехи при этом удается не всегда. Особенно трудно получить хорошее подавление, если помехи в основном и компенсационных каналах разных уровней.
Основным недостатком всех вышеуказанных устройств автокомпенсации является недостаточное подавление активных шумовых помех при их большом уровне.
Техническим результатом предлагаемого изобретения является повышение коэффициента подавления АШП в импульсных РЛС с многоканальными автокомпенсаторами.
Для достижения указанного результата в импульсные РЛС с антенной решеткой, электронное сканирование луча которой осуществляется управляющими цифровыми фазовращателями, расположенными в каждом дипольном канале АР, имеющие ДОС основного приемного канала, ДОС компенсационных приемных каналов и многоканальный автокомпенсатор, реализованный программным или аппаратным способом, вводится вычислительное устройство, реализующее генетический алгоритм (GA) (Holland J.H. Genetic algorithms, Sei. Amer. pp.66-72, July 1992. "Phase-Only A daptive Nulling with a Genetic Algorithm" IEEE Transactions on Antennas and Propagation. Vol.45, No6, June 1997) или любой другой алгоритм фазового синтеза нулей, аналогичный ему, например, один из описанных в следующих источниках информации: Baird C.A. and Rassweiler "Adaptive sidelobe nulling using digitally controlled Phase - shifters" IEEE Transactions on Antennas and Propagation. Vol.AP-24. pp.638-649, 1976; или Shor R.A. "Nulling at Symmetrie pattern location with phase - only weight control". IEEE Transactions on Antennas and Propagation. Vol.AP-32. pp.530-533, 1989.
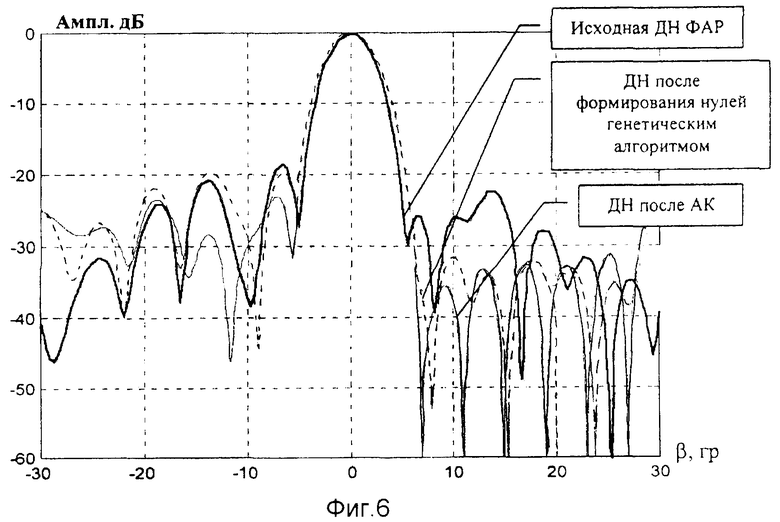
С помощью генетического алгоритма управление цифровыми фазовращателями, применяемыми для электронного сканирования ДНА РЛС, производится только по младшим разрядам кодов. При этом формируются предварительные провалы в боковых лепестках ДНА с минимальным влиянием на форму основного лепестка (фиг.6). Эти провалы в дальнейшем углубляются с помощью многоканального автокомпенсатора, который обеспечивает требуемое подавление помех после реализации генетического алгоритма.
На фиг.1 представлена блок-схема предлагаемого изобретения.
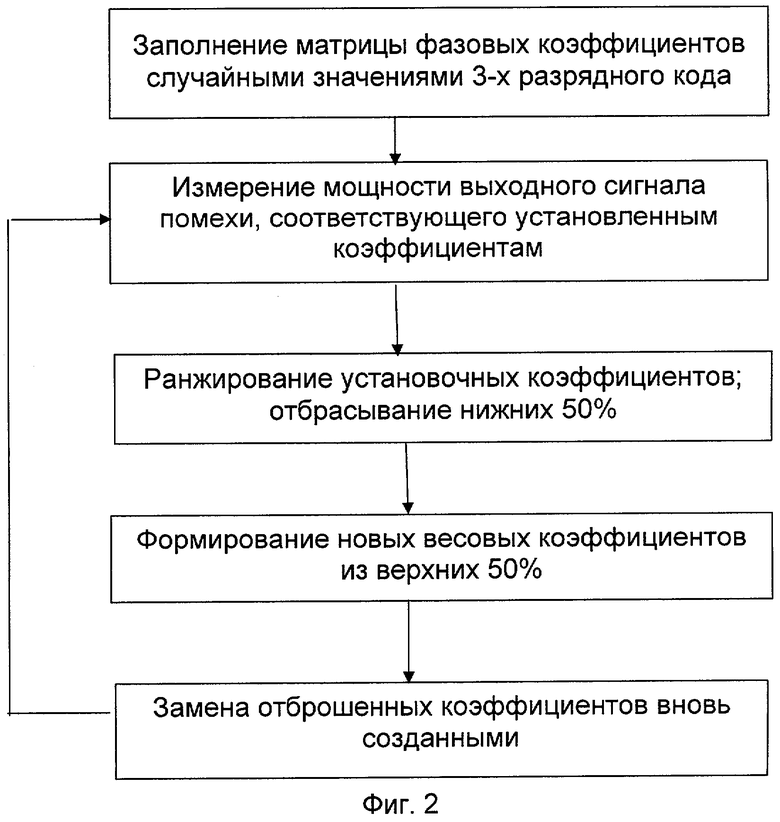
На фиг.2 - выполнение операций в соответствии с генетическим алгоритмом.
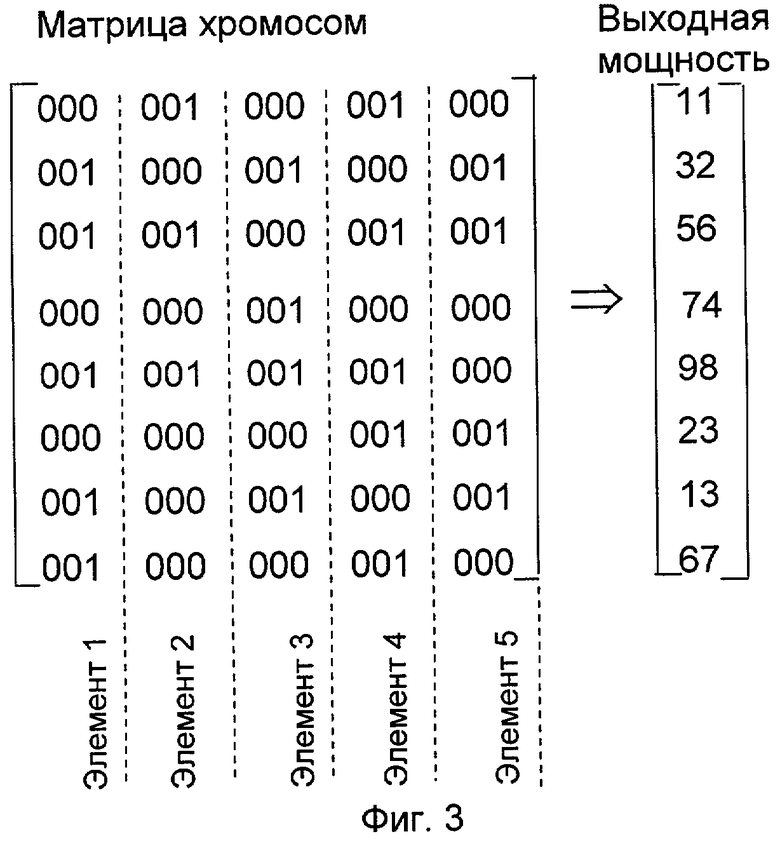
На фиг.3 - вид матрицы MxNP и вектора выходных мощностей.
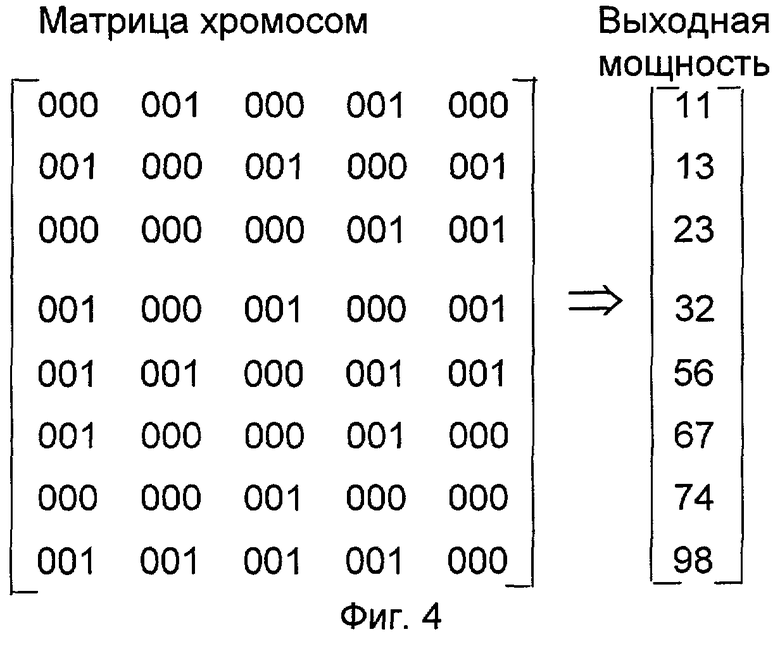
На фиг.4 - вид ранжированной матрицы.
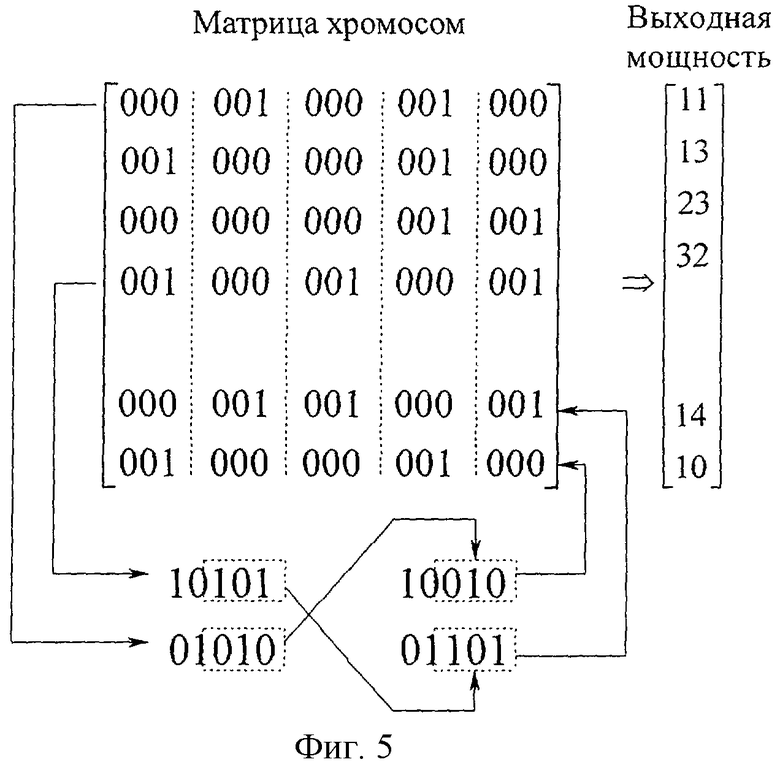
На фиг.5 - операция формирования новых весовых коэффициентов.
На фиг.6 - диаграмма направленности, исходная и после автокомпенсации.
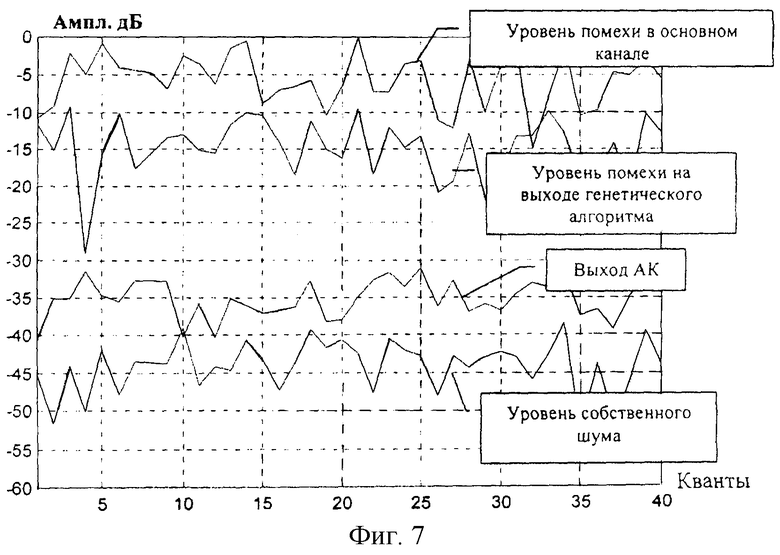
На фиг.7 - временные уровни шумовых реализации в основном приемном канале РЛС.
На фиг.1 использованы следующие обозначения:
1 - антенная решетка (АР);
2 - цифровые фазовращатели;
3 - ДОС основного приемного канала;
4 - ДОС компенсационных приемных каналов;
5 - вычислительное устройство, реализующее генетический алгоритм (GA), далее - вычислительное устройство;
6 - многоканальный автокомпенсатор.
Предлагаемая система защиты импульсных РЛС от АШП состоит из антенной решетки 1, управляемых цифровых фазовращателей 2, ДОС основного приемного канала 3, ДОС компенсационных приемных каналов 4, вычислительного устройства 5, реализующего генетический или любой другой алгоритм фазового синтеза нуля, и многоканального автокомпенсатора 6, реализованного программным с помощью вышеуказанного вычислительного устройства 5 или аппаратным способом. Первый выход антенной решетки 1 соединен с цифровыми фазовращателями 2, второй ее выход - с ДОС приемных компенсационных каналов 4. Выход цифровых фазовращателей 2 соединен с входом ДОС основного приемного канала 3, а ее выход - с входом вычислительного устройства 5 и первым входом многоканального автокомпенсатора 6. Выход вычислительного устройства 5 соединен со вторым входом цифровых фазовращателей 2. Выход диаграммообразующей системы компенсационных приемных каналов 4 соединен со вторым входом многоканального автокомпенсатора 6, выход которого является выходом всей системы защиты.
Заявляемая система защиты от АШП работает следующим образом. Сигналы активных шумовых помех, принятые антенной решеткой 1, поступают на цифровые фазовращатели 2 и на ДОС компенсационных приемных каналов 4. С цифровых фазовращателей 2 сигналы подаются на ДОС основного приемного канала 3, с которого, оцифрованные и усиленные, поступают на вычислительное устройство 5 и на первый вход многоканального автокомпенсатора 6.
В вычислительном устройстве 5 в период настройки вырабатываются весовые коэффициенты, которые запоминаются на тактовый период, и с его первого выхода поступают на младшие разряды кодов управления цифровыми фазовращателями 2 (вход 2, вход управления) с целью создания предварительных провалов в боковых лепестках ДНА в направлении действия АШП. С цифровых фазовращателей 2 сигнал с предварительными провалами в боковых лепестках, т.е. с ослабленной помехой, снова поступает на ДОС основного приемного канала 3, а с ее выхода - на вход вычислительного устройства 5 и на первый вход многоканального автокомпенсатора 6, на второй вход которого поступают сигналы с ДОС компенсационных приемных каналов 4 для дальнейшей автокомпенсации. В многоканальном автокомпенсаторе предварительные провалы в боковых лепестках ДНА углубляются, и общее подавление АШП (данные по результатам моделирования) становится гарантированной величиной, равной 35-40 дБ (фиг.7).
Генетический алгоритм работает следующим образом. Первой операцией алгоритма является формирование в вычислительном устройстве 5 матрицы MxNP из случайных "0" и "1", составляющих коды управления цифровыми фазовращателями (фиг.2). Далее производится последовательная установка цифровых фазовращателей 2 в соответствии со случайными кодами каждой строки матрицы и соответственное измерение выходной мощности сигналов АШП, поступающих с ДОС основного приемного канала 3. В вычислительном устройстве 5 по результатам измерений составляется вектор выходных мощностей (фиг.3), который ранжируется по увеличивающейся выходной мощности помех, и в соответствии с этим составляется ранжированная матрица выходных мощностей (фиг.4). Следующим шагом (фиг.5) в соответствии с генетическим алгоритмом является отбрасывание половины тех строк, которым соответствует максимальная выходная мощность (фиг.3). Затем в качестве "родителей" случайным образом выбираются две строки для создания двух кодовых строк в результате обмена частью кодов, объем части кодов выбирается случайно, и т.д. до образования нового "потомства" (строк) в обмен отброшенного старого. После этого процесс повторяется сначала.
Основным критерием окончания процесса является минимальная выходная мощность сигнала помехи на выходе ДОС основного приемного канала.
Многоканальный автокомпенсатор может быть реализован программно или аппаратно. Для примера рассмотрим многоканальный автокомпенсатор, реализованный программно и работающий по алгоритму прямого вычисления вектора весовых коэффициентов в соответствии с формулой Винера-Хопфа. На этот весовой коэффициент затем умножают сигналы, принимаемые компенсационными каналами. Вектор весовых коэффициентов определяется по формуле (1), которую в развернутом виде можно представить как
Следует отметить, что использование только алгоритма фазового синтеза нуля, GA или любого другого, без применения многоканального автокомпенсатора, как показало моделирование, не дает стабильного результата подавления АШП и носит случайный характер, особенно при наличии нескольких помех в одной и той же помеховой ситуации. Разбросы величин подавления могут быть различными, но в среднем генетический алгоритм гарантирует подавление помех на 10-15 дБ.
Кроме того, известно, что любые автокомпенсаторы, ввиду конечности их постоянной времени, плохо работают или практически не работают при нестационарной помехе. В предлагаемой системе защиты импульсных РЛС от АШП применение генетического алгоритма позволяет подавлять такие помехи, поскольку критерием работы GA вне зависимости от типа сигнала помехи является минимум выходной мощности этого сигнала на выходе ДОС основного приемного канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕСОВОГО КОЭФФИЦИЕНТА В УСЛОВИЯХ НЕСТАЦИОНАРНОСТИ ПОМЕХОВОЙ ОБСТАНОВКИ | 2022 |
|
RU2807614C1 |
| Устройство адаптивной защиты радиолокационной станции от активных шумовых помех с произвольным пространственным спектром и различной поляризационной структурой | 2018 |
|
RU2739394C2 |
| РАДИОЛОКАЦИОННОЕ ПРИЕМНОЕ УСТРОЙСТВО | 1984 |
|
SU1841013A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ АКТИВНЫХ ПОМЕХ | 2009 |
|
RU2444751C2 |
| ПОМЕХОЗАЩИЩЕННОЕ ПРИЕМНОЕ УСТРОЙСТВО РЛС | 1989 |
|
SU1841067A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| СПОСОБ И УСТРОЙСТВО ОБЗОРА ПРОСТРАНСТВА В РЛС | 2014 |
|
RU2564130C1 |
| АДАПТИВНАЯ ЭНЕРГЕТИКО-КОРРЕЛЯЦИОННАЯ СИСТЕМА ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 1996 |
|
RU2116000C1 |
Изобретение относится к радиолокации, в частности к методам защиты импульсных РЛС от активных шумовых помех (АШП) с применением устройств автокомпенсации. Техническим результатом предлагаемого изобретения является повышение коэффициента подавления АШП в импульсных РЛС с многоканальными автокомпенсаторами. Рассматриваются импульсные РЛС, у которых в качестве антенной системы используется антенная решетка (АР) с электронным сканированием луча, т.е. электронным сканированием диаграммы направленности антенны (ДНА), содержащие цифровые фазовращатели, диаграммообразующую систему (ДОС) основного приемного канала, ДОС компенсационных приемных каналов и многоканальный автокомпенсатор (АК), который может быть реализован аппаратным или программным способом. Система защиты импульсных РЛС от АШП состоит из антенной решетки, цифровых фазовращателей, ДОС основного приемного канала, ДОС компенсационных приемных каналов, вычислительного устройства, реализующего генетический или любой другой алгоритм фазового синтеза нуля, и многоканального автокомпенсатора, причем первый выход антенной решетки соединен с цифровыми фазовращателями, второй ее выход - с ДОС компенсационных приемных каналов, выход цифровых фазовращателей соединен с входом ДОС основного приемного канала, выход которой соединен с входом вычислительного устройства и первым входом многоканального автокомпенсатора, выход вычислительного устройства соединен со вторым входом цифровых фазовращателей, а выход ДОС компенсационных приемных каналов соединен со вторым входом многоканального автокомпенсатора, выход которого является выходом всей системы защиты импульсных РЛС. 7 ил.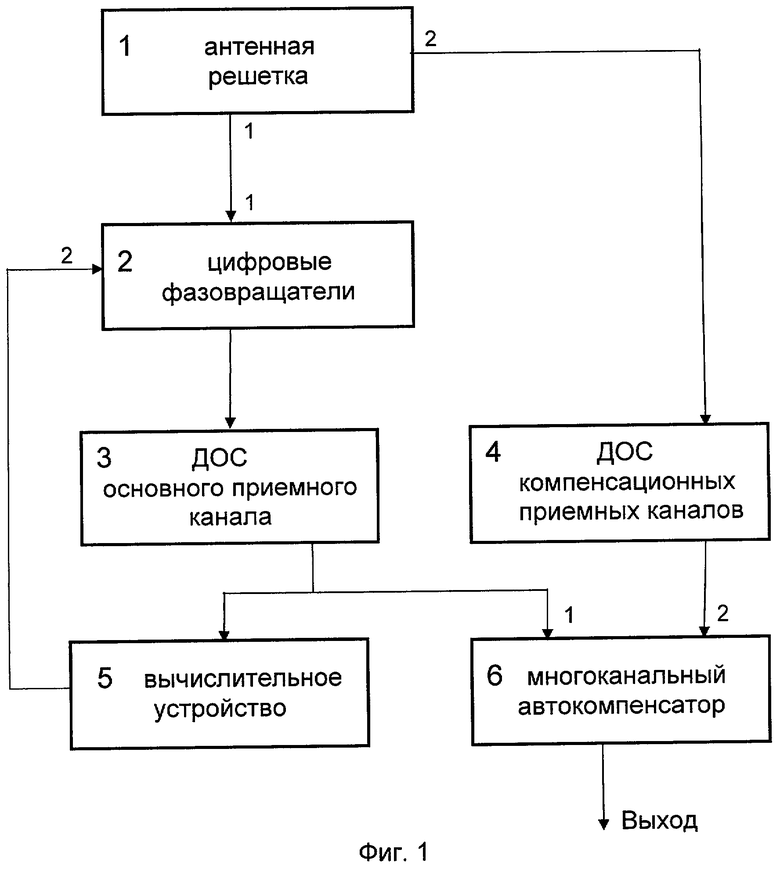
Система защиты импульсных радиолокационных станций от активных шумовых помех, состоящая из последовательно соединенных антенной решетки, цифровых фазовращателей, диаграммообразующей системы основного приемного канала и вычислительного устройства, реализующего генетический или любой другой алгоритм фазового синтеза нуля для формирования предварительных провалов в боковых лепестках диаграммы направленности антенны с минимальным влиянием на форму основного лепестка, выход которого соединен со вторым входом цифровых фазовращателей, а также из диаграммообразующей системы компенсационных приемных каналов, вход которой соединен со вторым выходом антенной решетки, и многоканального автокомпенсатора, первый и второй входы которого соответственно соединены с выходами диаграммообразующих систем основного и компенсационных каналов, а выход является выходом всей системы защиты.
| US 4119963 A, 10.10.1978 | |||
| RU 2003112886 A, 20.11.2004 | |||
| СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ ТВОРЧЕСКОГО ИСКУССТВЕННОГО ИНТЕЛЛЕКТА | 1993 |
|
RU2092900C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2237263C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ | 1998 |
|
RU2139627C1 |
| УСТРОЙСТВО ДЛЯ ПРОКАТКИ КОЛЕЦ С НЕСИММЕТРИЧНЫМ ПРОФИЛЕМ ТИПА ФЛАНЦЕВ | 1972 |
|
SU423552A1 |
| US 4225870 А, 30.09.1980. | |||

