Предлагаемое устройство поиска и слежения относится к области широкополосных систем радиосвязи, в которых используются шумоподобные сигналы.
Известны устройства поиска и слежения за шумоподобным сигналом, например описанные в книгах: Шумоподобные сигналы в системах передачи информации. М.: Сов. радио, 1973 г. Под ред. Пестрякова В.Б.; Тузов Г.И. Статистическая теория приема сложных сигналов. М.: Сов. радио", 1977 г.
Описанные в книгах устройства обладают существенным недостатком: не обеспечивают высокой помехозащищенности поиска и обнаружения шумоподобных сигналов с неизвестной или меняющейся несущей частотой за малое время поиска.
Известны и другие устройства поиска шумоподобного сигнала, например, описанные в авторских свидетельствах: "Устройство поиска широкополосных сигналов", Авт. св. №425367 МКИ Н 04 В 1/10.
В этих устройствах поиска шумоподобного сигнала используются многоканальные корреляторы и схемы автоматической подстройки частоты (АПЧ).
Однако основным их недостатком является то, что обеспечение высокой помехозащищенности обнаружения шумоподобного сигнала может быть достигнуто за счет уменьшения шумовой полосы корреляторов и перестройки гетеродина с шагом по частоте, равным шумовой полосе корреляторов. А это приводит к увеличению времени поиска по несущей частоте. Кроме того, для уменьшения времени ввода в синхронизм по несущей частоте необходимо использовать АПЧ с большим быстродействием, что приводит к ухудшению помехоустойчивости синхронизации.
Из известных устройств поиска шумоподобного сигнала наиболее близким по технической сущности (прототипом) является устройство поиска шумоподобного сигнала. Блок-схема устройства поиска (прототипа) приведена на фиг.1, для которой введены следующие обозначения:
1 - регистр сдвига;
2 - перемножитель;
3 - интегратор;
4 - амплитудный детектор;
5 - сдвигающий триггер;
6Л, 6Ц, 6П - схема выбора максимальных сигналов;
7 - схема сравнения на четыре входа;
8 - ключ;
9 - формирователь порога;
10 - сумматор;
11 - схема сравнения на два входа;
12 - управляемый делитель точной дискретной ФАП;
13 - управляемый делитель грубой дискретной ФАП;
14 - схема управления;
15 - генератор синхронизирующей псевдослучайной последовательности импульсов (ГСП);
16 - схема управления по задержке;
17 - опорный генератор;
18 - схема принятия решений;
19 - устройство фазирования по задержке;
20 - генератор информационной псевдослучайной последовательности (ГИП);
21 - дополнительный регистр сдвига;
22 - дополнительная схема сравнения на два входа;
23 - дополнительный сдвигающий триггер.
Для облегчения понимания физической сути работы устройства поиска шумоподобного сигнала, а также учитывая, что многие функциональные узлы прототипа по своему назначению выполняют аналогичные функции и дополняют друг друга, авторы решили укрупнить некоторые функциональные узлы прототипа:
1. Функциональные узлы 1, 5, 15 выполняют функцию генерирования синхронизирующих псевдослучайных последовательностей, сдвинутых по фазе на длительность элементарного импульса τо. Функциональные узлы 11, 12, 13, 16 и 17 выполняют функцию управления по фазе СП, т.е. осуществляют перестройку СП на интервал времени 2 (n+1)τо, грубую подстройку на τо и точную подстройку фазы.
Функциональные узлы 20, 2) и 23 выполняют функцию генерирования информацией псевдослучайной последовательности, а 19 - фазирование по задержке ИП.
Все эти функциональные узлы объединены в блок управляемых генераторов СП и ИП (синхронизирующих псевдослучайных последовательностей и информационной псевдослучайной последовательности).
2. Схема сравнения на четыре входа 7, дополнительная схема сравнения на два входа 22, ключи 8, сумматор 10, схема принятия решения 18 объединены в узел - блок принятия решений.
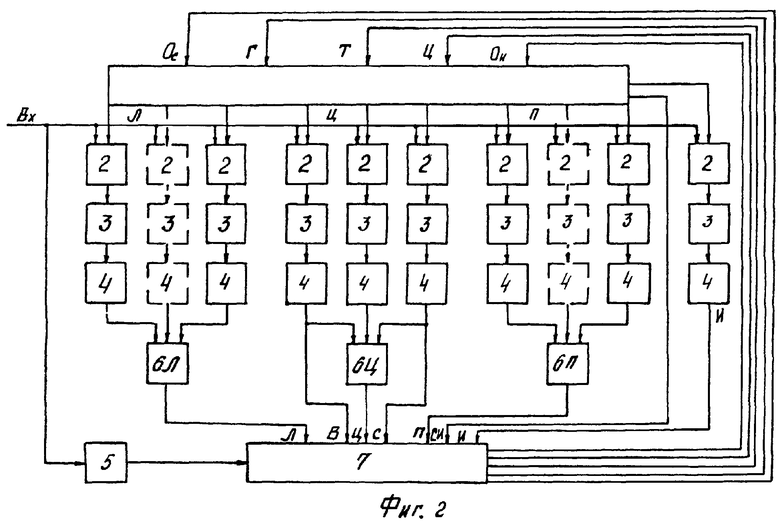
Блок-схема Устройства поиска шумоподобного сигнала (прототипа) с учетом укрупнений представлена на фиг.2, для которой введены следующие обозначения:
1 - блок управляемых генераторов СП и ИП;
2 - перемножитель;
3 - интегратор;
4 - амплитудный детектор;
5 - формирователь порога;
6Л, 6Ц, 6П - схемы выбора максимальных сигналов;
7 - блок принятия решений.
Устройство поиска (прототип) имеет следующие функциональные связи.
Вход устройства поиска соединен:
с входом формирователя порога 5, подключенного к блоку принятия решений 7, с радиочастотными входами перемножителей 2, левой, центральной и правой групп корреляторов СП, а также с радиочастотным входом перемножителя 2 коррелятора ИП.
Последовательное соединение узлов 2, 3 и 4 образует коррелятор. Выходы амплитудных детекторов 4, корреляторов СП левой, центральной и правой групп подключены к схемам выбора максимальных сигналов 6Л, 6Ц, 6П, выходы которых Л, Ц и П соединены с блоком принятия решений 7, а выход И амплитудного детектора 4 коррелятора ИП подключен к одному из входов блока 7.
Выходы В и С амплитудных детекторов 4 левого и правого корреляторов центральной группы также подключены ко входам блока 7, выходы которого Ос, Г, Т, Ц, Ои соединены со входами блока управляемых генераторов СП и ИП 1. Один выход СИ блока 1 подключен к одному из входов блока 7, другой выход подключен к видеочастотному входу перемножителя 2 коррелятора ИП, а остальные выходы блока 1 соединены с видеочастотными входами перемножителей левой, центральной и правой групп.
Устройство поиска (прототип) работает следующим образом:
Входной шумоподобный сигнал поступает на радиочастотные входы перемножителей 2 левой, центральной и правой групп корреляторов, а также на радиочастотный вход перемножителя 2 коррелятора ИП фиг.2. На видеочастотные входы перемножителей 2 левой и правой групп корреляторов с блока 1 поступают синхронизирующие псевдослучайные последовательности, сдвинутые относительно друг друга на τо. СП, подаваемые на видеочастотные входы перемножителей 2 центральной группы корреляторов, сдвинуты на τо/2. С выхода блока 1 на видеочастотный вход перемножителя 2 коррелятора ИП подается опорная информационная псевдослучайная последовательность. Если после включения устройства поиска сигналы с выходов Л, П и Ц, поступающие в блок 7, меньше порогового, который подается с формирователя порога 5 на блок 7, то последний принимает решение на перестройку блока управляемых генераторов СП и ИП (1).
Команда с выхода Ос отсутствует, и фаза генерируемых СП сдвигается на интервал времени 2 (n+1)τо (n - число корреляторов в левой или правой группе), и таким образом осуществляется поиск сигнала СП. Если в процессе поиска сигнал с выходов Л, Ц или П превышает пороговый, то блок 7 принимает решение о прекращении поиска СП. По команде с выхода Ос блок 1 прекращает сдвиг по фазе опорных СП на интервал времени 2 (n+1)τо.
По сигналам с выходов Л и П блок 7 вырабатывает управляющий сигнал на выходе Г, по которому блок 1 начинает грубую подстройку фазы генерируемых СП на величину τо в сторону опережения или отставания до тех пор, пока сигнал с выхода Ц, соответствующий появлению максимального сигнала в центральной группе не превысит сигналы с выходов Л и П, а также порогового. В этом случае блок 7: принимает решение на осуществление точной подстройки фазы генерируемых СП и по сигналам с выходов В и С вырабатывает сигнал управления на выходе Т, по которому блок 1 начинает точную подстройку фазы опорных СП, для повышения помехозащищенности подстройки - блокируется управление по сигналам с выходов Л и П, принимает решение на начало поиска ИП. Для этого с выхода блока 7 подается команда по выходу Ц на вход блока 1, по которой последний смещает фазу опорной ИП на интервал времени, равный периоду СП.
Если в процессе поиска сигнал с выхода И коррелятора информационного канала превысит пороговый сигнал в блоке 7, то последний принимает решение об обнаружении сигнала ИП и по команде с выхода Ои прекращает смещение фазы ИП в блоке 1. По сигналам обнаружения СП и ИП блок 7 принимает решение об обнаружении входного шумоподобного сигнала. Для обеспечения принятия достаточно надежных решений об обнаружении СП, ИП и шумоподобного сигнала с выхода блока 1 на один из входов блока принятия решений 7 подаются стробирующие импульсы с выхода СП. Если в течение β циклов поиска сигнал ИП не будет обнаружен, блок 7 принимает решение на возобновление поиска синхросигнала СП.
В блоке 1 можно устанавливать произвольный начальный сдвиг по времени между СП и ИП. Это дает возможность увеличить ансамбль структур. Алгоритм работы блока 7 выбирается из условия обеспечения принятия оптимальных решений об обнаружении СП, ИП и шумоподобного сигнала.
Устройство поиска (прототип) имеет существенный недостаток: низкую помехозащищенность поиска и обнаружения шумоподобного сигнала с неизвестной или изменяющейся его несущей частотой при малом времени поиска. Действительно, при неизвестной или изменяющейся несущей частоте входного шумоподобного сигнала из-за эффекта Допплера (например в системах связи через ИС3), преднамеренного изменения несущей частоты по заданному закону с целью повышения скрытности излучаемого сигнала в условиях действия радиоразведки противника, нестабильности опорных генераторов и др., для обеспечения поиска шумоподобного сигнала в устройстве (прототипе) необходимо расширять полосу пропускания интегратора на величину априорной неопределенности несущей частоты.
В этом случае снижается помехозащищенность устройства поиска. Для сохранения помехозащищенности устройства поиска (прототипа) необходимо вводить дополнительный поиск по несущей частоте в зоне ее априорной неопределенности без расширения полосы пропускания интегратора. Однако это приводит к значительному увеличению времени поиска. Другой путь получения высокой помехозащищенности при малом времени поиска - это введение в каждый корреляционный канал "гребенки" интеграторов, перекрывающей всю зону априорной неопределенности несущей частоты шумоподобного сигнала. В этом случае значительно усложняется система поиска, возрастают габариты, снижается точность и стабильность ее характеристик, что в конечном итоге не позволяет реализовать высокую помехозащищенность при малом времени поиска.
Целью предлагаемого устройства поиска и слежения за шумоподобным сигналом является повышение помехозащищенности поиска и обнаружения шумоподобного сигнала с неизвестной или изменяющейся несущей частотой и уменьшение времени ввода в синхронизм.
Эта цель достигается тем, что в устройство поиска шумоподобного сигнала (в прототип), содержащее: блок управляемых генераторов СП и ИП, перемножители, коррелятор ИП, состоящий из перемножителя, интегратора и амплитудного детектора, причем выходы блока управляемых генераторов СП и ИП соединены с видеочастотными входами перемножителей, выход перемножителя коррелятора ИП через интегратор соединен с амплитудным детектором, введены: в каждый корреляционный канал СП - фильтр, осуществляющий ограничение полосы и блок временного сжатия, который осуществляет временную компрессию (сжатие) и формирование сжатого аналогового сигнала, коммутатор, обеспечивающий временное разделение сигналов с блоков временного сжатия, поступающих на перестраиваемый интегратор, перестраиваемый интегратор, выполненный со сбросом и осуществляющий накопление и детектирование сигнала, дополнительный формирователь порога, решающая схема с памятью, устройство слежения за частотой входного сигнала, преобразователь временного интервала в частоту, который управляет работой устройства слежения за частотой входного сигнала, и формирователь сигналов управления, обеспечивающий синхронную работу блоков временного сжатия, коммутатора, перестраиваемого интегратора, преобразователя временного интервала в частоту и решающей схемы с памятью, причем выход устройства слежения за частотой входного сигнала соединен с радиочастотными входами перемножителей, выходы которых, кроме перемножителя в корреляторе ИП, в каждом корреляционном канале соединены с фильтрами, подключенными к блокам временного сжатия сигналов, выходы которых через коммутатор соединяются с входом перестраиваемого интегратора, выход которого непосредственно и через дополнительный формирователь порога подключен к входам решающей схемы с памятью, четвертый вход которой соединен с выходом амплитудного детектора коррелятора ИП, пять выходов решающей схемы с памятью соединены со входами блока управляемых генераторов СП и ИП, выходы которого соединены с видеочастотными входами перемножителей, а один выход его соединен с формирователем сигналов управления, выходы которого соединены с решающей схемой с памятью, коммутатором, перестраиваемым интегратором и с одним входом преобразователя временного интервала в частоту, два других входа которого соединены с выходами решающей схемы с памятью, а выход подключен к управляющему входу устройства слежения за частотой входного сигнала, другой вход которого является входом устройства поиска и слежения за шумоподобным сигналом.
Блок-схема предлагаемого устройства поиска и слежения за шумоподобным сигналом представлена на фиг.3, для которой введены следующие обозначения:
1 - блок управляемых генераторов СП и ИП;
2 - перемножитель;
3 - интегратор;
4 - амплитудный детектор;
8 - устройство слежения за частотой входного сигнала;
9 - преобразователь временного интервала в частоту;
10 - фильтр;
11 - блок временного сжатия;
12 - коммутатор;
13 - перестраиваемый интегратор;
14 - дополнительный формирователь порога;
15 - решающая схема с памятью;
16 - формирователь сигналов управления.
Предлагаемое устройство поиска и слежения имеет следующие функциональные связи:
Выход устройства слежения за частотой входного сигнала 8 соединен с радиочастотными входами перемножителей 2, выходы которых, кроме перемножителя коррелятора ИП, соединены в каждом корреляционном канале с фильтрами 10, подключенными к блокам временного сжатия 11, выходы которых через коммутатор 12 соединены с перестраиваемым интегратором 13, выход которого непосредственно и через дополнительный формирователь порога 14 подключен к решающей схеме с памятью 15, третий вход которой соединен с выходом амплитудного детектора 4, а память выходов решающей схемы с памятью Ос, Т, Г, Ц, Ои подключена к блоку управляемых генераторов СП и ИП 1, один выход которого соединен с входом формирователя сигналов управления 16, два выхода которого У1, и Д подключены к блокам временного сжатия 11, третий выход У2 соединен с коммутатором 12, четвертый выход Уз соединен с перестраиваемым интегратором 13, четвертым входом решающей схемы с памятью 15 и первым входом преобразователя временного интервала в частоту 9, два других входа которого соединены с пятым выходом Ос и шестым выходом решающей схемы с памятью 15, а выход преобразователя временного интервала в частоту подключен к одному из входов устройства слежения за частотой входного сигнала 8, другой вход которого является входом устройства поиска и слежения за шумоподобным сигналом.
Предлагаемое устройство поиска и слежения работает следующим образом.
Входной шумоподобный сигнал после прохождения через устройство слежения за частотой входного сигнала 8 поступает на радиочастотные входы перемножителей 2, на видеочастотные входы которых, кроме перемножителя коррелятора сигнала ИП, подаются синхронизирующие псевдослучайные последовательности СП с блока 1, сдвинутые друг относительно друга на τо. Способ, подаваемые на видеочастотные входы перемножителей 2 центральной группы, сдвинуты на  . С одного из выходов блока 1 на видеочастотный вход перемножителя 2 коррелятора ИП подается опорная информационная псевдослучайная последовательность. Сигнал с выходов перемножителей 2 в каждом корреляторе СП подается на вход фильтров 10. Полоса пропускания фильтров 10 превышает шумовую полосу устройства поиска и слежения и может быть равна всей полосе неопределенности несущей частоты входного шумоподобного сигнала или составлять часть этой полосы. Наличие фильтров 10 в каждом корреляторе СП является обязательным, так как позволяет избежать перекрытия спектральных составляющих входного сигнала после его квантования, которым сопровождается временное сжатие.
. С одного из выходов блока 1 на видеочастотный вход перемножителя 2 коррелятора ИП подается опорная информационная псевдослучайная последовательность. Сигнал с выходов перемножителей 2 в каждом корреляторе СП подается на вход фильтров 10. Полоса пропускания фильтров 10 превышает шумовую полосу устройства поиска и слежения и может быть равна всей полосе неопределенности несущей частоты входного шумоподобного сигнала или составлять часть этой полосы. Наличие фильтров 10 в каждом корреляторе СП является обязательным, так как позволяет избежать перекрытия спектральных составляющих входного сигнала после его квантования, которым сопровождается временное сжатие.
Сигнал с выхода фильтра 10 в каждом корреляционном канале поступает на вход блока временного сжатия (БВС) 11. Блок временного сжатия 11 осуществляет временное сжатие входного сигнала и формирование сжатого аналогового сигнала. При этом отношение длительности реализации входного сигнала записываемой в БВС к длительности реализации выходного сигнала при однократном считывании называется коэффициентом сжатия. Коэффициент сжатия K можно также выразить через отношение полосы частот, занимаемой выходным сжатым сигналом к полосе частот входного (записываемого) сигнала.
Для осуществления временного сжатия входного сигнала блоком БВС выполняются следующие операции:
1. Входной сигнал квантуется только по времени, в случае использования аналоговых запоминающих устройств, или по времени и по уровню, в случае применения цифровых запоминающих устройств.
2. Записывается реализация входного сигнала (N выбранных значений), за время Тн.
3. Осуществляется считывание K раз (K - произвольное число) со скоростью считывания превышающей скорость записи (запоминания) в коэффициент сжатия раз.
4. Формируется аналоговый сжатый сигнал.
Для осуществления дискретизации входного сигнала и его записи на один из входов БВС 11 подаются импульсы с выхода Д формирователя сигналов управления 16. Для управления процессом записи и считывания БВС 11 на другой его вход подается сигнал У1 с выхода формирователя сигналов управления 16.
Так как в процессе сжатия длительность реализации входного сигнала, представляющей собой смесь сигнала и шума, уменьшается, следовательно, спектр расширяется, поэтому время наблюдения (интегрирования) уменьшается обратно пропорционально коэффициенту сжатия K. Именно это обстоятельство дает возможность выделить полезный сигнал из шумов, обеспечив малую шумовую полосу, т.е. высокую помехозащищенность при неизвестной или изменяющейся несущей частоте шумоподобного сигнала в полосе его неопределенности при малом времени поиска.
Аналоговые сигналы с выходов БВС поступают на коммутатор 12. Команда У2 с формирователя сигналов управления определяет работу коммутатора таким образом, что с его выхода последовательно считываются сигналы с блоков 11.
В течение времени реализации сжатого аналогового сигнала, равного Тн/K, коммутатор 12 подключает выход одного из блоков временного сжатия к перестраиваемому интегратору 13, в котором за это время происходит накопление и детектирование сжатого сигнала, затем коммутатор подключает выход следующего БВС к перестраиваемому интегратору и так далее до последнего БВС. Если число корреляционных каналов равно 2n+3, то общее время одного цикла считывания со всех каналов будет (2n+3)Тн/K. Далее цикл считывания повторяется М раз, где М - число частотных позиций перестраиваемого интегратора, необходимое для вычисления взаимокорреляционных функций входного и опорных сигналов во всем диапазоне неопределенности несущей частоты входного шумоподобного сигнала -  где ΔF - диапазон неопределенности несущей частоты входного шумоподобного сигнала, а Δf - шумовая полоса перестраиваемого интегратора 13.
где ΔF - диапазон неопределенности несущей частоты входного шумоподобного сигнала, а Δf - шумовая полоса перестраиваемого интегратора 13.
Таким образом, общее время считывания со всех корреляционных каналов и на всех частотах будет равно: Tс=(2n+3)M Тн/K. Частота перестраиваемого интегратора 13, на которой происходит накопление входного сигнала, в течение каждого цикла считывания по всем временным каналам остается постоянной, а от цикла к циклу меняется на величину Δf - равную шумовой полосе интегратора 13. Если начальная частота настройки перестраиваемого интегратора 13 равна f1-то на i-ом цикле считывания она будет равна fi=f1+(i-1)Δf. Общая полоса частот - на которых происходит накопление сигнала в перестраиваемом интеграторе за время М циклов считывания - равна: М Δf=ΔF·K, т.е. равна общей неопределенности несущей частоты входного шумоподобного сигнала.
Накопленный и продетектированный сигнал с выхода перестраиваемого интегратора поступает на дополнительный формирователь порога 14 и на вход решающей схемы с памятью 15.
Значение порога вычисляется в дополнительном формирователе порога 14 как сумма всех значений накопленных сигналов, взятая с постоянным коэффициентом. Это дает возможность, в отличие от устройства - прототипа, в котором значение порога вычислялось в отдельном канале, устранить влияние нестабильностей амплитудно-частотных характеристик формирователя порога на алгоритм принятия решений.
В решающей схеме с памятью 15 происходит запоминание всех накопленных значений сигналов (их число (2n+3) М), т.е. значений взаимокорреляционных функций входного и опорных сигналов в пределах задержек 2(n+1)τo, определяемом числом корреляционных каналов и в диапазоне несущих частот входного сигнала - ΔF.
В конце М циклов считываний принимается решение по следующему алгоритму. Решающая схема с памятью 15 выбирает из (2n+3)М запомненных проинтегрированных сигналов максимальный и сравнивает его с порогом. В том случае, если максимальный накопленный сигнал не превосходит порога, с выхода Ос решающей схемы с памятью 15 отсутствует команда, поступающая на блок 1 и последний осуществляет перестройку опорных СП на интервал 2(n+1)τo, т.е. продолжается поиск синхросигнала. Если максимальный сигнал превысит порог, то вырабатываемая решающей схемой 15 команда Ос останавливает перестройку опорных СП на интервал 2(n+1)τo.
Одновременно с этим в решающей схеме с памятью 15 определяется временное положение максимального накопленного сигнала относительно начала считывания на 1-ом цикле, т.е. относительно временного положения сигнала в 1-ом временном канале СП и на 1-ой частоте накопления перестраиваемого интегратора 13. Поскольку последовательность поступления сигналов со всех корреляционных каналов СП и на всех частотах интегратора 13 известна, то временное положение максимального накопленного сигнала однозначно определяет номер корреляционного канала и несущую частоту опорного сигнала, для которых взаимокорреляционная функция со входным сигналом имеет максимальное значение. Если интервал времени равен [(2n+3)p+m] Tн/K, то это соответствует значению частоты fр=f1+(р-1)Δf и m-ому корреляционному каналу. В решающей схеме с памятью 15 определяется интервал времени соответствующий р-ому циклу считывания и таким образом появляется возможность определения несущей частоты входного сигнала и следовательно неограниченно быстрой подстройки этой частоты с помощью устройства слежения за частотой входного сигнала (8).
Неопределенность несущей частоты не превышает шумовой полосы интегратора, приведенной ко входу т.е. Δf/K и может быть весьма малой величиной. Далее решающая схема с памятью 15 определяет в какой из групп корреляционных каналов находится m-ый канал. Если он соответствует правой или левой группам, то по сигналу с выхода Г блока 1 осуществляет грубую подстройку фазы генерируемых СП на величину τo в сторону опережения или отставания до тех пор, пока значение максимального накопленного сигнала не будет обнаружено в центральной группе корреляторов СП. В этом случае по команде с выхода Т блок 1 начинает точную подстройку фазы опорных СП на интервал τo/α.
Одновременно с этим начинается поиск ИП. Для этого с выхода Ц подается команда Ц на вход блока 1, по которой последний смещает фазу опорных ИП на интервал времени равный периоду СП. В управляемом генераторе ИП предусмотрено изменение положения опорного сигнала ИП относительно опорных сигналов СП, что позволяет расширить ансамбль возможных кодов. Поиск входного сигнала ИП состоит из γ циклов поиска. Если сигнал с выхода коррелятора ИП превышает порог в β циклах поиска, то решающая схема с памятью 15 принимает решение о наличии ИП если, β≥βо, и об отсутствии сигнала ИП, если β<βo. В случае принятия решения о наличии сигнала ИП блок (15) вырабатывает сигнал Си, по которому прекращается смещение фазы ИП в блоке 1. По сигналам Ос и Ои схема 15 принимает решение об обнаружении входного шумоподобного сигнала. Если в течение γ циклов поиска сигнал ИП не обнаружен, решающая схема с памятью 15 перестает выдавать команду Ос и устройство возвращается в режим поиска синхросигнала СП.
Одновременно с командой Ос решающая схема с памятью 15 вырабатывает сигнал 11, по которому блок 9 формирует управляющий сигнал на устройство слежения за частотой входного сигнала 8, таким образом, чтобы скорректировать значение несущей частоты входного сигнала до выбранного значения опорной частоты. Для этого на блок преобразователя временного интервала в частоту 9 с блока 15 поступает интервал времени, пропорциональный отклонению несущей частоты входного сигнала от опорной.
В качестве опорной выбирается одна из М частот накопления перестраиваемого интегратора 13 (например средняя -  , если М - нечетно). При этом если частота накопления интегратора, соответствующая максимальному сигналу с выхода блока 13 больше или меньше опорной частоты
, если М - нечетно). При этом если частота накопления интегратора, соответствующая максимальному сигналу с выхода блока 13 больше или меньше опорной частоты  , то в преобразователе временного интервала в частоту 9, формируется сигнал ошибки, который поступает на устройство слежения за частотой входного сигнала (8) и компенсирует отклонение частоты в меньшую или большую сторону. Спектр входного шумоподобного сигнала смещается при этом таким образом, что максимальное накопление сигнала происходит на опорной частоте перестраиваемого интегратора. Такой способ подстройки частоты существенно увеличивает быстродействие подстройки несущей частоты входного сигнала при высокой помехозащищенности и устойчивости синхронизации, по сравнению с применяемыми системами ФАП и ЧАП.
, то в преобразователе временного интервала в частоту 9, формируется сигнал ошибки, который поступает на устройство слежения за частотой входного сигнала (8) и компенсирует отклонение частоты в меньшую или большую сторону. Спектр входного шумоподобного сигнала смещается при этом таким образом, что максимальное накопление сигнала происходит на опорной частоте перестраиваемого интегратора. Такой способ подстройки частоты существенно увеличивает быстродействие подстройки несущей частоты входного сигнала при высокой помехозащищенности и устойчивости синхронизации, по сравнению с применяемыми системами ФАП и ЧАП.
Помехозащищенность и время поиска определяются следующими формулами: 
где qвых - отношение сигнал/шум на выходе;
qвх - отношение сигнал/шум на входе;
Кк1 - коэффициент потерь в устройстве поиска;
Т поиска - максимальное время поиска СП;
τо - длительность элементарного импульса псевдослучайных последовательностей СП и ИП;
Тн - время аакопления входного сигнала;
Всп - база сигнала СП;
ΔF - диапазон неопределенности несущей частоты входного шумоподобного сигнала;
Δf - шумовая полоса коррелятора СП;
n - число корреляционных каналов в левой группе.
Для вычисления времени поиска и помехозащищенности устройства-прототипа задаемся следующими данными:
n=3, τo=0,5 мкс; Всп=2047; ΔF1=32; кГц Δf1=500 Гц; Тн1=2 млс.
При этом находим Т1 поиска ≈33 с; П1≈64 K1;
Для предлагаемого устройства можно задаться следующими исходными данными τо=0,5 мкс; n=3; Всп=2047; ΔF2=32 кГц; Тн2=16 млсек. Сжатие сигнала позволяет шумовую полосу коррелятора СП сделать практически равной общей неопределенности несущей частоты входного сигнала т.е. Δf2=ΔF2=32 кГц, тогда получаем T2 поиска ≈4 с; П2≈180 K1.
Таким образом, из данного примера следует, что предлагаемое устройство поиска и слежения за шумоподобным сигналам позволяет повысить помехозащищенность и уменьшить время вхождении в синхронизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1983 |
|
SU1840276A1 |
| УСТРОЙСТВО ПОИСКА И ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840447A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840444A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1978 |
|
SU1840096A1 |
| ПРИЕМОПЕРЕДАЮЩАЯ АППАРАТУРА ШИРОКОПОЛОСНЫХ ПСЕВДОСЛУЧАЙНЫХ СИГНАЛОВ | 1979 |
|
SU1840119A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1981 |
|
SU1840035A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840136A2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1977 |
|
SU1840712A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1982 |
|
SU1840503A1 |

Изобретение относится к области радиотехники и может быть использовано в спутниковых системах связи. Техническим результатом является повышение помехозащищенности поиска и обнаружения шумоподобного сигнала с неизвестной или изменяющейся несущей частотой и уменьшение времени вхождения в синхронизм. Технический результат осуществляется за счет того, что устройство, содержащее интегратор, блок управляемых генераторов синхронизирующей последовательности (СП) и информационной последовательности (ИП), выходы которого подключены к видеочастотным входам перемножителей по числу корреляционных каналов СП и коррелятора ИП, решающий блок, формирователь порога и блок управляемых генераторов СП и ИП, снабжено коммутатором и формирователем сигналов управления. Каждый корреляционный канал СП снабжен фильтром и блоком временного сжатия, соединенными между собой последовательно. 3 ил.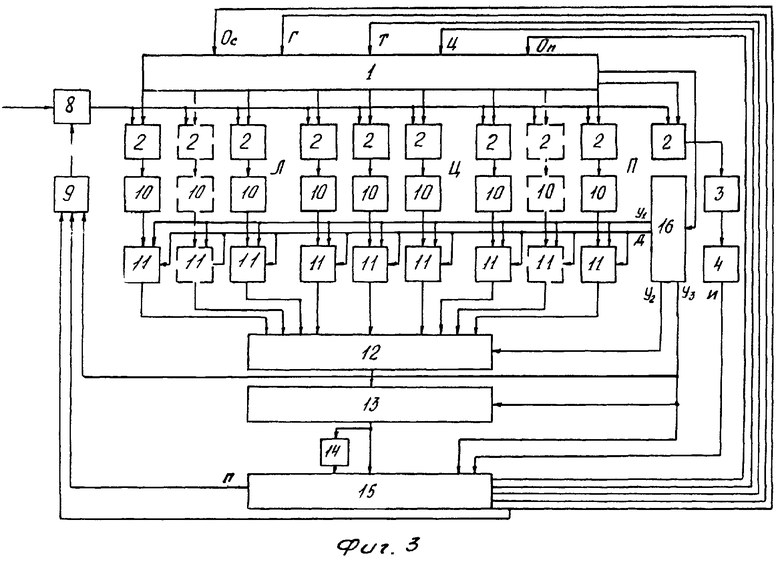
Устройство поиска и слежения за шумоподобным сигналом, содержащее интегратор, блок управляемых генераторов синхронизирующей последовательности (СП) и информационной последовательности (ИП), выходы которого подключены к видеочастотным входам перемножителей по числу корреляционных каналов СП и коррелятора ИП, выход которого и выход формирователя порога подключены к соответствующим входам решающего блока, выходы которого подключены к соответствующим входам блока управляемых генераторов СП и ИП, отличающееся тем, что, с целью повышения помехозащищенности поиска и обнаружения щумоподобного сигнала с неизвестной или изменяющейся несущей частотой и уменьшения времени вхождения в синхронизм, введены коммутатор, формирователь сигналов управления, а в каждый корреляционный канал СП - последовательно соединенные фильтр и блок временного сжатия, при этом в каждом корреляционном канале СП выход перемножителя подключен ко входу фильтра, два других входа блока временного сжатия объединены с соответствующими входами блоков временного сжатия других корреляционных каналов СП и подключены к соответствующим входам формирователя сигналов управления, к управляющему входу которого подключен соответствующий выход блока управляемых генераторов СП и ИП, первый выход формирователя сигналов управления подключен к управляющему входу интегратора, а второй выход формирователя сигналов управления подключен к соответствующему входу решающего блока и к управляющему входу коммутатора, к сигнальным входам которого подключены выходы блоков временного сжатия корреляционных каналов СП, а выход коммутатора через интегратор подключен ко входу формирователя порога и к соответствующему входу решающего блока.

