Изобретение относится к области широкополосных систем радиосвязи с шумоподобными сигналами и преимущественно может быть использовано в спутниковых системах связи.
Известны устройства поиска шумоподобных сигналов, например, описанные в авторских свидетельствах:
№ 425367, МКИ Н 04 L 1/10 "Устройство поиска широкополосных сигналов",
№ 439928, МКИ Н 04 В 1/06 "Следящий приемник шумоподобных сигналов с многоканальным устройством поиска",
№ 604171, Н 04 L 7/00 "Устройство поиска шумоподобных сигналов", в которых сокращение времени поиска достигается за счет такого построения схемы, при котором оптимальным образом используются многоканальные корреляторы.
Однако значительное сокращение времени поиска в таких устройствах можно получить либо за счет увеличения количества корреляционных каналов, т.е. габаритов устройства, либо за счет снижения времени накопления сигнала, что приводит к уменьшению помехозащищенности обнаружения.
В книге [1] описано устройство, в котором снижение времени поиска шумоподобного сигнала достигнуто за счет сжатия входного сигнала во времени. Однако принцип сжатия, используемый в данном устройстве, не позволяет получить большой коэффициент сжатия для сигналов с широкими спектрами порядка десятков мегагерц и больше.
Наиболее близким по технической сути к заявляемому изобретению следует считать устройство поиска шумоподобного сигнала (проотип).
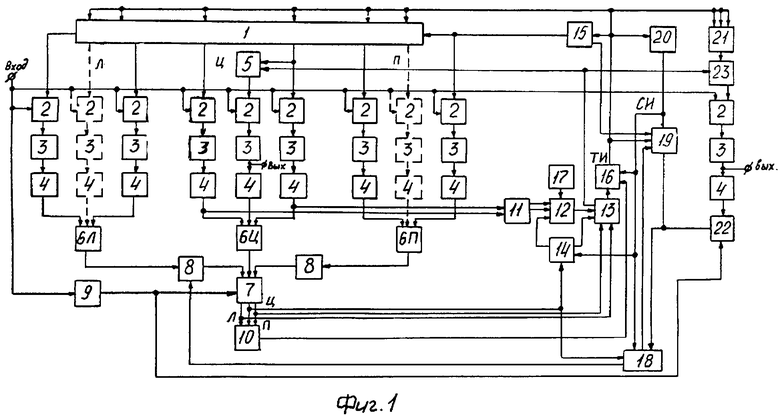
Блок-схема устройства поиска шумоподобного сигнала представлена на фиг.1, для которой введены следующие обозначения:
1 - регистр сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - сдвигающий триггер,
6л, 6ц, 6п - схемы выбора максимальных значений сигналов,
7 - схема сравнения на четыре входа,
8 - ключ,
9 - формирователь порога,
10 - сумматор,
11 - схема сравнения на два входа,
12 - управляемый делитель точной дискретной ФАП,
13 - управляемый делитель грубой дискретной ФАП,
14 - устройство управления,
15 - генератор синхронизирующей псевдослучайной последовательности,
16 - схема управления по задержке,
17 - опорный генератор,
18 - схема принятия решения,
19 - устройство фазирования по задержке,
20 - генератор информационной псевдослучайной последовательности,
21 - дополнительный регистр сдвига,
22 - дополнительная схема сравнения на два входа,
23 - дополнительный сдвигающий триггер.
Для облегчения понимания физической сути предлагаемого устройства авторы укрупнили некоторые функциональные узлы прототипа (фиг.1).
1. Последовательно соединенные перемножители 2, интеграторы 3, амплитудные детекторы 4, в группе выполняют функцию вычисления, взаимной корреляции между принимаемым и опорными сигналами. Эта операция может осуществляться различными техническими средствами, например, с помощью коррелятора с использованием рециркулятора, цифровых методов обработки, кинематических фильтров и т.д. Поэтому вышеуказанные соединения элементов объединены в узел - группа узкополосных корреляторов.
2. Генератор синхронизирующей псевдослучайной последовательности 15, регистр сдвига 1, сдвигающий триггер 5, генератор информационной последовательности 20, дополнительный сдвигающий триггер 23, устройство фазирования по задержке 19, управляемый делитель точной дискретной ФАП 12, управляемый делитель грубой дискретной ФАП 13, устройство управления 14, схема управления по задержке 16 объединены в узел - управляемый генератор синхронизирующей и информационной псевдослучайных последовательностей (СП и ИП).
3. Схемы выбора максимальных значений сигналов 6Л, 6Ц, 6П, схема сравнения на четыре входа 7, ключи 8, сумматор 10, схема сравнения на два входа 22, схема принятия решений 18 объединены в узел - решающая схема.
Укрупненная блок-схема прототипа представлена на фиг.2, для которой введены следующие обозначения:
1 - управляемый генератор СП и ИП,
2 - группа узкополосных корреляторов,
3 - формирователь порога,
4 - решающая схема,
5 - опорный генератор.
Устройство (прототип) осуществляет параллельно-последовательный поиск и обнаружение сигнала синхронизирующей псевдослучайной последовательности (СП) тремя группами узкополосных корреляторов: первой и второй, каждая из которых состоит из n каналов и центральной группой, состоящей из трех каналов: левого, центрального и правого, и последовательный поиск и обнаружение сигнала информационной псевдослучайной последовательности (ИП) узкополосным коррелятором ИП. Зона поиска входного шумоподобного сигнала синхронизирующей последовательности, равная периоду его следования, разбивается на N временных интервалов возможного нахождения сигнала. Длительность каждого интервала равна 2 (n+1)τo, где τo - длительность элементарного импульса псевдослучайных последовательностей СП и ИП.
Входной шумоподобный сигнал поступает на радиочастотные входы узкополосных корреляторов устройства. На видеочастотные входы узкополосных корреляторов первой, второй групп, левого и правого каналов центральной группы подаются опорные сигналы синхронизирующей последовательности с управляемого генератора СП и ИП, сдвинутые относительно друг друга на τo. Опорный сигнал СП, поступающий на узкополосный коррелятор центрального канала сдвинут относительно опорных сигналов левого и правого каналов на  На видеочастотный вход узкополосного коррелятора ИП поступает опорный сигнал информационной последовательности, сфазированный с сигналом синхропоследовательности, с выхода управляемого генератора СП и ИП.
На видеочастотный вход узкополосного коррелятора ИП поступает опорный сигнал информационной последовательности, сфазированный с сигналом синхропоследовательности, с выхода управляемого генератора СП и ИП.
В узкополосных корреляторах первой, второй и центральной групп вычисляется взаимная корреляция между входным шумоподобным сигналом и опорными сигналами синхронизирующей последовательности (СП). Максимальный сигнал каждой группы сравнивается в решающей схеме с выходным сигналом формирователя порога.
Если в процессе поиска сигнала синхронизирующей псевдослучайной последовательности 2 (n+1) корреляционными каналами в i-м временном интервале сигнал не обнаружен (максимальные сигналы групп меньше порога), решающая схема 4 выдает команду по выходу "О", по которой происходит задержка опорных сигналов СП и ИП в управляемом генераторе СП и ИП на время 2 (n+1)τo и устройство начинает поиск в следующем (i+1)-м временном интервале.
При обнаружении входного сигнала СП в одном из N временных интервалов левой или правой группой узкополосных корреляторов (максимальный сигнал групп превысит порог), решающая схема запрещает задержку опорных сигналов и разрешает грубую подстройку по команде "Г" на ±τо до тех пор, пока входной сигнал не будет обнаружен центральной группой узкополосных корреляторов, после чего решающая схема запрещает грубую подстройку и разрешает точную подстройку фазы опорных сигналов СП и ИП по команде "Т" с шагом  , где L - любое целое число, определяемое заданной точностью слежения. Точная подстройка фазы опорных сигналов осуществляется по выходным сигналам "В" и "С" левого и правого каналов центральной группы. После обнаружения сигнала СП центральной группой корреляторов решающая схема принимает решения о начале поиска сигнала информационной псевдослучайной последовательности (ИП). Узкополосным коррелятором ИП просматривается m возможных временных позиций сигнала ИП относительно сигнала СП.
, где L - любое целое число, определяемое заданной точностью слежения. Точная подстройка фазы опорных сигналов осуществляется по выходным сигналам "В" и "С" левого и правого каналов центральной группы. После обнаружения сигнала СП центральной группой корреляторов решающая схема принимает решения о начале поиска сигнала информационной псевдослучайной последовательности (ИП). Узкополосным коррелятором ИП просматривается m возможных временных позиций сигнала ИП относительно сигнала СП.
При обнаружении сигнала ИП решающая схема при условии совпадения подряд v стробирующих импульсов и обнаруженных сигналов СП и ИП, принимает решение об обнаружении входного шумоподобного сигнала, состоящего из сигналов СП и ИП. Если число совпадений сигналов меньше v и равно p и после p-го совпадения не произойдет подряд j совпадений, решающая схема выдает команду в управляемый генератор СП и ИП на возобновление поиска входного шумоподобного сигнала. В управляемом генераторе СП и ИП можно изменять временную задержку между сигналами СП и ИП, тем самым увеличивая ансамбль кодов.
Основным недостатком прототипа является то, что для обеспечения высокой помехозащищенности устройства требуется большое время поиска.
В качестве примера рассмотрим реальную линию связи с шумоподобными сигналами, в которой за счет эффекта Допплера и нестабильности частот опорных генераторов существует зона неопределенности несущей частоты входного сигнала порядка Δf=30 кГц. Для обеспечения помехоустойчивости устройства порядка 40 дБ при значении τo=0,5 мкс, время накопления входного сигнала, определяемое из формулы

где П - помехоустойчивость обнаружения сигнала, П=100;
qвых - отношение сигнал/шум на выходе корреляторов;
qвх - отношение сигнал/шум на входе устройства;
Тн - время накопления входного сигнала;
K - коэффициент потерь в устройстве;
K=0,2-0,3,
составит около 10 млс, при полосе корреляторов порядка ΔF=100 Гц. Время поиска входного сигнала синхронизирующей последовательности определяется из формулы

где Всп - база сигнала СП,
n - число корреляторов в одной группе.
При Всп=2047, n=3. Общее время поиска сигнала СП составляет приблизительно 750 с.
Несмотря на то, что шумоподобные сигналы обеспечивают достаточно высокую имитостойкость, время порядка 750 с оказывается достаточным для расшифровки сигнала противником и постановки преднамеренных помех, по структуре и фазе совпадающих с полезным сигналом.
Одним из способов уменьшения времени поиска шумоподобных сигналов является сжатие входного сигнала во времени и быстрый анализ всех возможных значений задержки сигнала и частоты его несущей. Этот способ используется в предлагаемом устройстве.
Целью предлагаемого устройства для поиска шумоподобного сигнала является сокращение времени поиска входного шумоподобного сигнала. Для этого в устройство-прототип, содержащее управляемый генератор СП и ИП, группы узкополосных корреляторов, формирователь порога, решающую схему, опорный генератор, причем видеочастотные входы узкополосных корреляторов соединены с выходами управляемого генератора СП и ИП, выходы узкополосных корреляторов соединены с четырьмя входами решающей схемы, пятый вход которой соединен с формирователем порога, четыре выхода решающей схемы соединены со входами управляемого генератора СП и ИП, введены: управляемый генератор СП и ИП, выполненный с программным устройством группы узкополосных корреляторов, выполненных со сбросом, канальные запоминающие устройства, предназначенные для сжатия входного шумоподобного сигнала во времени, входные полосовые фильтры для разделения входного сигнала на спектральные составляющие, введение которых позволяет увеличить коэффициент сжатия входного сигнала, анализатор помех, полосовые фильтры и сумматор, предназначенные для восстановления сжатого во времени входного сигнала, генератор синхронизирующей псевдослучайной последовательности (СП), формирователь начального состояния, предназначенный для установки начального состояния генератора СП, три группы корреляторов со сбросом, предназначенные для обработки сжатого по времени входного шумоподобного сигнала, дополнительный формирователь порога, устройство управления, осуществляющие заданный алгоритм работы всего устройства для поиска шумоподобного сигнала и формирователь импульсов, причем входной шумоподобный сигнал поступает на входные полосовые фильтры, выходы которых соединены со входами анализатора помех и первыми входами канальных запоминающих устройств, вторые входы которых соединены с выходами устройства управления, выходы канальных запоминающих устройств через полосовые фильтры и сумматор соединены с радиочастотными входами корреляторов и дополнительным формирователем порога, выход которого соединен с решающей схемой, видеочастотные входы корреляторов соединены с выходами генератора СП, один вход которого соединен с выходом формирователя импульсов, второй вход соединен с формирователем начального состояния, третий соединен с выходом устройства управления, второй выход которого соединен с первым входом формирователя начального состояния, третий выход соединен с решающей схемой, четвертый выход - со входами сброса узкополосных корреляторов, радиочастотные входы которых соединены со входом формирователя порога и первым выходом анализатора помех, пятый выход устройства управления соединен со входами сброса корреляторов, выходы которых соединены с решающей схемой, первый вход устройства управления соединен со вторым выходом анализатора помех, второй вход соединен со вторым выходом формирователя импульсов, вход которого соединен с опорным генератором, третий вход устройства управления соединен с управляемым генератором СП и ИП с программным устройством, четвертый вход соединен с выходом решающей схемы, два выхода которой соединены со вторым и третьим входами формирователя начального состояния, четвертый вход которого соединен с выходом управляемого генератора СП и ИП с программным устройством, пятый, шестой и седьмой входы которого соединены с решающей схемой, а восьмой вход соединен с третьим выходом формирователя импульсов.
Блок-схема предлагаемого устройства представлена на фиг.3, для которой введены следующие обозначения:
1 - управляемый генератор синхронизирующей и информационной псевдослучайных последовательностей (СП и ИП) с программным устройством,
2 - группа узкополосных корреляторов со сбросом,
3 - формирователь порога,
4 - решающая схема,
5 - опорный генератор,
6 - формирователь импульсов,
7 - анализатор помех,
8 - устройство управления,
9 - формирователь начального состояния,
10 - входной полосовой фильтр,
11 - канальное запоминающее устройство,
12 - полосовой фильтр,
13 - сумматор,
14 - генератор синхронизирующей псевдослучайной последовательности (СП),
15 - группа корреляторов со сбросом,
16 - дополнительный формирователь порога.
В предлагаемом устройстве осуществляется корреляционная обработка сжатого во времени отрезка входного сигнала. Используемый метод сжатия позволяет получить большой коэффициент сжатия как для сигналов с относительно узкой полосой спектра, так и для сигналов с полосой спектра порядка нескольких мегагерц и больше. Суть метода состоит в том, что сжимаются отдельные спектральные составляющие входного сигнала с последующим их объединением.
Для этого входной сигнал поступает на гребенку m входных полосовых фильтров (10) с полосой Δf1. Выходные сигналы каждого фильтра запоминаются в соответствующих канальных запоминающих устройствах в течение времени Тн, равного времени накопления сигнала.
По окончании записи записанные сигналы периодически считываются со скоростью в K раз большей скорости записи и поступает через соответствующие полосовые фильтры 12 на сумматор 13, в котором происходит восстановление сжатого во времени отрезка входного сигнала.
С выхода сумматора сигнал поступает на радиочастотные входы первой и второй групп корреляторов со сбросом 15, каждая из которых состоит из n корреляционных каналов из центральной 15, состоящей из одного канала.
На видеочастотные входы трех групп корреляторов со сбросом подаются опорные сигналы синхронизирующей псевдослучайной последовательности с выхода генератора СП 14, сдвинутые относительно друг друга на время  где τо - длительность элементарного импульса входного шумоподобного сигнала.
где τо - длительность элементарного импульса входного шумоподобного сигнала.
Для согласования работы генератора синхропоследовательности в управляемом генераторе СП и ИП с программным устройством 1, тактовая частота которого равна тактовой частоте входного синхросигнала и генератора СП 14 работающего с частотой в K раз большей, введем формирователь начального состояния 9, который запоминает текущее состояние генератора СП и ИП в момент начала записи входного сигнала и перед каждым циклом считывания и обработки сигнала устанавливает начальное состояние генератора СП 14 в соответствии с командами решающей схемы.
После этого в течение времени  происходит обработка сжатого отрезка входного сигнала корреляторами со сбросом 15 и принятия решения об обнаружении или необнаружении сигнала в этой области задержек на основании сравнения максимальных сигналов каждой группы корреляторов со сбросом 15 с выходным сигналом дополнительного формирователя порога 16.
происходит обработка сжатого отрезка входного сигнала корреляторами со сбросом 15 и принятия решения об обнаружении или необнаружении сигнала в этой области задержек на основании сравнения максимальных сигналов каждой группы корреляторов со сбросом 15 с выходным сигналом дополнительного формирователя порога 16.
В случае необнаружения сигнала (выходные сигналы корреляторов меньше порога) по сигналу необнаружения "О" с выхода решающей схемы происходит задержка опорных последовательностей в управляемом генераторе СП и ИП 1 на время (2 n+1)τo, а формирователь начального состояния изменяет начальную комбинацию символов таким образом, чтобы в следующем цикле считывания и обработки относительная задержка считываемого отрезка входного сигнала и опорных последовательностей СП в генераторе СП 14 изменились на время 
В случае обнаружения сигнала решающая схема выдает сигнал обнаружения по выходу "О", по которому прекращается задержка опорных сигналов и осуществляются грубые подстройки по команде "Г" до тех пор, пока сигнал не обнаружится в центральной группе корреляторов.
После этого по команде "Ц1" устройство переходит в поиску сигнала СП группой узкополосных корреляторов СП со сбросом 2. Это необходимо для устранения возможной задержки входного сигнала и опорных сигналов в управляемом генераторе СП и ИП 1, возникшей за время поиска сигнала СП.
Входной шумоподобный сигнал с выхода анализатора помех поступает на радиочастотные входы узкополосного коррелятора ИП 2 и группы узкополосных корреляторов СП, состоящей из трех корреляционных каналов: левого, правого и центрального.
На видеочастотные входы этих каналов подаются опорные сигналы СП с управляемого генератора СП и ИП, сдвинутые относительно друг друга на время  В каждом цикле поиска входной сигнал обрабатывается в течение времени накопления Тн, после чего корреляторы устанавливаются в исходное состояние. Выходные сигналы всех трех корреляционных каналов сравниваются в решающей схеме с сигналом порога с выхода формирователя порога 3. Поиск сигнала СП группой узкополосных корреляторов СП осуществляется следующим образом. По команде "Ц1" решающей схемы включается программное устройство в управляемом генераторе СП и ИП 1, которое по команде "Г2" осуществляет сдвиг опорных последовательностей в каждом цикле поиска по закону, обеспечивающему обнаружение сигнала СП в зоне возможного рассогласования задержек, входного и опорных сигналов. При обнаружении сигнала СП по команде "Г2" выключается программное устройство и начинаются точные подстройки фазы опорных сигналов с шагом
В каждом цикле поиска входной сигнал обрабатывается в течение времени накопления Тн, после чего корреляторы устанавливаются в исходное состояние. Выходные сигналы всех трех корреляционных каналов сравниваются в решающей схеме с сигналом порога с выхода формирователя порога 3. Поиск сигнала СП группой узкополосных корреляторов СП осуществляется следующим образом. По команде "Ц1" решающей схемы включается программное устройство в управляемом генераторе СП и ИП 1, которое по команде "Г2" осуществляет сдвиг опорных последовательностей в каждом цикле поиска по закону, обеспечивающему обнаружение сигнала СП в зоне возможного рассогласования задержек, входного и опорных сигналов. При обнаружении сигнала СП по команде "Г2" выключается программное устройство и начинаются точные подстройки фазы опорных сигналов с шагом  где L - целое число, определяющее точность подстройки. После обнаружения сигнала СП центральным корреляционным каналом по команде "Ц2" устройство начинает поиск сигнала ИП узкополосным коррелятором ИП 2.
где L - целое число, определяющее точность подстройки. После обнаружения сигнала СП центральным корреляционным каналом по команде "Ц2" устройство начинает поиск сигнала ИП узкополосным коррелятором ИП 2.
Более подробно работа устройства осуществляется следующим образом.
Входной шумоподобный сигнал через гребенку m входных полосовых фильтров с полосой Δf, поступает на канальные запоминающие устройства и анализатор помех. В канальных запоминающих устройствах по командам устройства управления происходит запись выборок сигналов с частотой 2Δf, в течение времени накопления Тн, определяемого заданной помехоустойчивостью устройства поиска. Одновременно с началом записи устройство управления выдает команду, по которой в формирователе начального состояния происходит запоминание l символов начальной комбинации генерируемой последовательности СП, представляющих собой текущие состояния элементов памяти генератора СП в управляемом генераторе СП и ИП с программным устройством. Во время записи сигналов анализатор помех оценивает помеховую обстановку в каждом из m частотных каналов и выдает команду в устройство управления, запрещающую считывание сигналов в каналах, с сосредоточенными по спектру помехами. По окончании записи сигналов начинается поиск входного сигнала СП, который состоит из М периодически повторяющихся циклов считывания и обработки записанных сигналов. При этом предлагаемое многоканальное устройство поиска просматривает все возможные временные позиции входного сигнала СП.
Каждый цикл поиска начинается с записи l символов начальной комбинации генерируемой последовательности СП, хранящихся в формирователе начального состояния, в генератор СП по команде устройства управления. По окончании записи устройство управления выдает команды на прохождение тактовых импульсов с формирователя импульсов в генератор СП и считывание информации, записанной в канальных запоминающих устройствах. Скорость считывания информации в K раз больше, чем при записи, а спектры сигналов в K раз шире. С канальных запоминающих устройств, проходя через соответствующие фильтры с полосой Δf2=KΔf1, сигналы поступают на сумматор, с выхода которого сжатый по времени входной шумоподобный сигнал поступает на радиочастотные входы поисковых корреляторов первой, второй и центральной групп. На видеочастотные входы этих корреляторов поступают опорные сигналы СП с выходов генератора СП с тактовой частотой  сдвинутые относительно друг друга на время
сдвинутые относительно друг друга на время  где τo - длительность элементарного импульса входного шумоподобного сигнала. Первая и вторая группы корреляторов состоят из n корреляционных каналов, центральная - из одного. Каждый корреляционный канал представляет собой устройство квазиоптимальной фильтрации для сжатого во времени входного сигнала СП с задержкой, определяемой опорным канальным сигналом СП. В каждой группе выбирается максимальный сигнал корреляционных каналов, который в решающей схеме сравнивается с выходным сигналом дополнительного формирователя порога. В случае необнаружения входного сигнала СП (максимальные сигналы групп меньше порога) решающая схема выдает сигнал по выходу "О", по которому опорные сигналы СП и ИП в управляемом генераторе СП и ИП с программным устройством задерживаются на время (2n+1)τo, а в формирователе начального состояния формируются новые l символов начальной комбинации, сдвинутые относительно предыдущих на (2 n+1)τo позицию в генерируемой последовательности СП. По окончании обработки сигнала и принятия решения устройство управления выдает команду на установку корреляторов в исходное состояние.
где τo - длительность элементарного импульса входного шумоподобного сигнала. Первая и вторая группы корреляторов состоят из n корреляционных каналов, центральная - из одного. Каждый корреляционный канал представляет собой устройство квазиоптимальной фильтрации для сжатого во времени входного сигнала СП с задержкой, определяемой опорным канальным сигналом СП. В каждой группе выбирается максимальный сигнал корреляционных каналов, который в решающей схеме сравнивается с выходным сигналом дополнительного формирователя порога. В случае необнаружения входного сигнала СП (максимальные сигналы групп меньше порога) решающая схема выдает сигнал по выходу "О", по которому опорные сигналы СП и ИП в управляемом генераторе СП и ИП с программным устройством задерживаются на время (2n+1)τo, а в формирователе начального состояния формируются новые l символов начальной комбинации, сдвинутые относительно предыдущих на (2 n+1)τo позицию в генерируемой последовательности СП. По окончании обработки сигнала и принятия решения устройство управления выдает команду на установку корреляторов в исходное состояние.
Начинается следующий цикл поиска входного сигнала СП. По команде устройства управления происходит запись l символов начальной комбинации генерируемой последовательности СП в генератор СП и повторное считывание, и обработка записного входного сигнала. Причем задержка опорных сигналов СП с выходов генератора СП относительно сжатого во времени входного шумоподобного сигнала изменилась на время 
В случае необнаружения сигнала СП за М циклов поиска по командам устройства управления происходит перезапись входного шумоподобного сигнала в канальных запоминающих устройствах и М циклов поиска сигнала СП повторяются.
Если в одном из М циклов сигнала обнаружен первой или второй группами корреляторов со сбросом (максимальный сигнал первой или второй группы превысит порог), решающая схема выдает команду обнаружения по выходу "О" и грубой подстройки по выходу "Г1". По этим командам в управляемом генераторе СП и ИП с программным устройством происходит задержка опорных сигналов СП и ИП на время τо и -τо, и в формирователе начального состояния формируется новая начальная комбинация из l символов, сдвинутых относительно предыдущих на одну позицию влево или вправо в генерируемой последовательности СП. В дальнейших циклах считывания и обработки сигнала СП происходит грубая подстройка опорных сигналов последовательностей СП в генераторе СП на  а в управляемом генераторе СП и ИП с программным устройством на ±τo до тех пор, пока сигнал СП не будет обнаружен центральной группой корреляторов со сбросом. В этом случае решающая схема выдает команду по выходу "Ц1", по которой устройство переходит к дальнейшим этапам поиска входного сигнала СП.
а в управляемом генераторе СП и ИП с программным устройством на ±τo до тех пор, пока сигнал СП не будет обнаружен центральной группой корреляторов со сбросом. В этом случае решающая схема выдает команду по выходу "Ц1", по которой устройство переходит к дальнейшим этапам поиска входного сигнала СП.
На этих этапах поиска устройство производит обработку входного сигнала непосредственно поступающего через входные полосовые фильтры и анализатор помех, в котором происходит восстановление входного сигнала по выходным сигналам входных фильтров, не содержащим сосредоточенных по спектру помех, на радиочастотные входы узкополосного коррелятора ИП и группы узкополосных корреляторов СП, и на формирователь порога. Группа узкополосных корреляторов СП состоит из трех каналов - левого, правого и центрального, на видеочастотные входы которых поступают опорные сигналы СП с выходов управляемого генератора СП и ИП с программным устройством сдвинутые относительно друг друга на 
По сигналу "Ц1" включается программное устройство управляемого генератора СП и ИП, осуществляющее поиск входного сигнала СП в области возможных задержек ±d·τo (d=1, 2, 3...) входного сигнала СП относительно опорного сигнала СП центрального канала, величина которой определяется возможным изменением задержки входного сигнала СП за время поиска сигнала на первом этапе. Сигналом сброса с устройства управления узкополосные корреляторы СП устанавливаются в исходное состояние, после чего начинается обработка входного сигнала в течение времени накопления Тн. В конце обработки выходные сигналы узкополосных корреляторов СП сравниваются в решающей схеме с выходным сигналом формирователя порога. В случае необнаружения входного сигнала СП (сигналы каналов меньше порога) программное устройство по команде "Г2" с решающей схемы задерживает опорные сигналы СП и ИП на +τо и цикл поиска повторяется. В дальнейшем при необнаружении сигнала СП программное устройство сдвигает опорные сигналы СП и ИП по закону -2 τо, 3 τо...(2 i-1)τo, -2 iτo... (2d-1)τo, -2dτo, где i - целое число, i=1,2,...d.
Если программное устройство прошло все циклы поиска входного сигнала СП и сигнал не обнаружен, программное устройство переходит в исходное состояние и выдает команду в устройство управления на начало первого этапа поиска входного сигнала СП, использующего принцип сжатия входного сигнала во времени.
При обнаружении сигнала СП во время работы программного устройства (хотя бы один из сигналов узкополосных корреляторов СП и превысил порог), решающая схема выдает команду по выходу "Т" на начало точной подстройки опорных сигналов СП. В этом режиме работы решающая схема сравнивает выходные сигналы левого, правого и центрального каналов узкополосного коррелятора СП по оптимальному критерию и выдает команду по выходу "Т", по которой происходит задержка опорных сигналов СП и ИП в управляемом генераторе СП и ИП с программным устройством на время  Целью точной подстройки является фазирование опорного сигнала центрального канала относительно входного сигнала СП с заданной точностью, определяемой целым числом L. При обнаружении входного сигнала СП центральным корреляционным каналом, решающая схема выдает команду "Ц2", по которой начинается поиск входного сигнала ИП.
Целью точной подстройки является фазирование опорного сигнала центрального канала относительно входного сигнала СП с заданной точностью, определяемой целым числом L. При обнаружении входного сигнала СП центральным корреляционным каналом, решающая схема выдает команду "Ц2", по которой начинается поиск входного сигнала ИП.
Так как длительность периода информационной последовательности Тип кратна длительности периода синхропоследовательности Тсп (Тип=α Тсп), для обнаружения сигнала ИП достаточно просмотреть α относительных положений сигналов ИП и СП. Для повышения помехоустойчивости устройства вводится β циклов повторений поиска ИП. Поиск сигнала ИП осуществляется следующим образом. Входной сигнал поступает на радиочастотный вход узкополосного коррелятора ИП, на видеочастотный вход которого поступает опорный сигнал ИП с выхода управляемого генератора СП и ИП с программным устройством. После сигнала сброса с устройства управления, переводящему узкополосный коррелятор ИП в исходное состояние, начинается обработка сигнала в течение времени Тн. В конце обработки входного сигнала выходной сигнал узкополосного коррелятора ИП сравнивается в решающей схеме с выходным сигналом формирователя порога. В случае необнаружения сигнала ИП (сигнал с узкополосного коррелятора ИП меньше порога) решающая схема выдает команду по выходу "И", по которой программное устройство в управляемом генераторе СП и ИП сдвигает опорную последовательность ИП на время длительности периода синхропоследовательности Тсп. Поиск сигнала ИП продолжается.
Если за все αβ циклов поиска сигнала ИП он не обнаружен, программное устройство в управляемом генераторе СП и ИП выдает команду в устройство управления на возобновление первого этапа поиска сигнала СП, использующего принцип сжатия входного сигнала во времени. Если сигнал ИП будет обнаружен в одном из αβ циклов поиска, решающая схема выдает команду по выходу И, по которой прекращается запрограммированный сдвиг опорной последовательности ИП и за последующие р циклов обработки входного шумоподобного сигнала узкополоснымми корреляторами СП и ИП решающая схема по оптимальному критерию обнаружения подтверждает или не подтверждает наличие входного шумоподобного сигнала. В случае неподтверждения программное устройство в управляемом генераторе СП и ИП по сигналу И с выхода решающей схемы завершает оставшиеся из αβ циклов поиска входного сигнала ИП.
Если за р циклов обработки входного шумоподобного сигнала решающая схема подтвердит наличие сигналов СП и ИП, предлагаемое устройство переходит в режим приема информации.
Время поиска входного сигнала синхронизирующей последовательности в предлагаемом устройстве для поиска шумоподобного сигнала определяется формулой

В рассматриваемом выше примере реальной линии связи при коэффициенте сжатия к=50 это время составит около 18 с. Такое значительное сокращение времени поиска сигнала СП достигается за счет сжатия во времени отдельных спектральных составляющих входного сигнала, при котором получается большой коэффициент сжатия входного шумоподобного сигнала. Возможность восстановления входного сигнала при такой операции опирается на следующие рассуждения.
Входной шумоподобный сигнал пропускается через гребенку m полосовых фильтров. Полоса каждого фильтра ϕj заключена в пределах от jΔf1 до (j+1)Δf1, где j - целое число,
Δf1 - ширина полосы фильтров. В канальных запоминающих устройствах происходит запоминание выборок сигналов с выходов каждого фильтра с частотой 2Δf1.
При сжатии во времени записанная информация выдается в виде последовательности узких импульсов с частотой fo≫2Δf1 и амплитудами, соответствующими значениям выборок. Спектр каждой последовательности импульсов имеет вид
где P(f) - спектр единичного импульса,
Sj(f) - спектр сигнала на выходе j-го фильтра ϕj.
Проходя через соответствующие фильтры Fj с полосой, заключенной от jfo/2 до (j+1)fo/2, сигналы поступают на сумматор, в котором сумма всех m сигналов пропускается через корректирующий фильтр с частотной характеристикой  в пределах суммарной полосы всех фильтров Fj. Спектр выходного сигнала фильтра имеет вид
в пределах суммарной полосы всех фильтров Fj. Спектр выходного сигнала фильтра имеет вид
где S(f) - спектр входного шумоподобного сигнала.
Таким образом, с выхода сумматора снимается сжатый во времени в  раз входной шумоподобный сигнал.
раз входной шумоподобный сигнал.
Источники информации
1. Н.Т.Петрович, М.К.Размахнин. Системы связи с шумоподобными сигналами, Москва: Советское радио, 1969 г., с.132.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1978 |
|
SU1840096A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШУМОПОДОБНЫМ СИГНАЛОМ | 1979 |
|
SU1840322A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОПОДОБНЫХ СИГНАЛОВ С ПРИЕМОМ ИНФОРМАЦИИ | 1980 |
|
SU1840564A2 |
| ПРИЕМОПЕРЕДАЮЩАЯ АППАРАТУРА ШИРОКОПОЛОСНЫХ ПСЕВДОСЛУЧАЙНЫХ СИГНАЛОВ | 1979 |
|
SU1840119A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840269A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840112A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840136A2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1977 |
|
SU1840712A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 1983 |
|
SU1840276A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА В СИНХРОНИЗМ СИСТЕМЫ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1980 |
|
SU1840128A1 |

Изобретение относится к области радиотехники и может быть использовано в спутниковых системах связи. Техническим результатом является сокращение времени поиска. Для достижения технического результата устройство, содержащее управляемый генератор синхронизирующей и информационной псевдослучайной последовательностей, группы узкополосных корреляторов, решающий блок и формирователь порога, снабжено тремя группами корреляторов, канальными блоками памяти, входными полосовыми фильтрами, анализаторами помех, полосовыми фильтрами, сумматором, генератором СП, формирователем начального состояния, дополнительным формирователем порога и блоком управления и формирователем импульсов. 3 ил.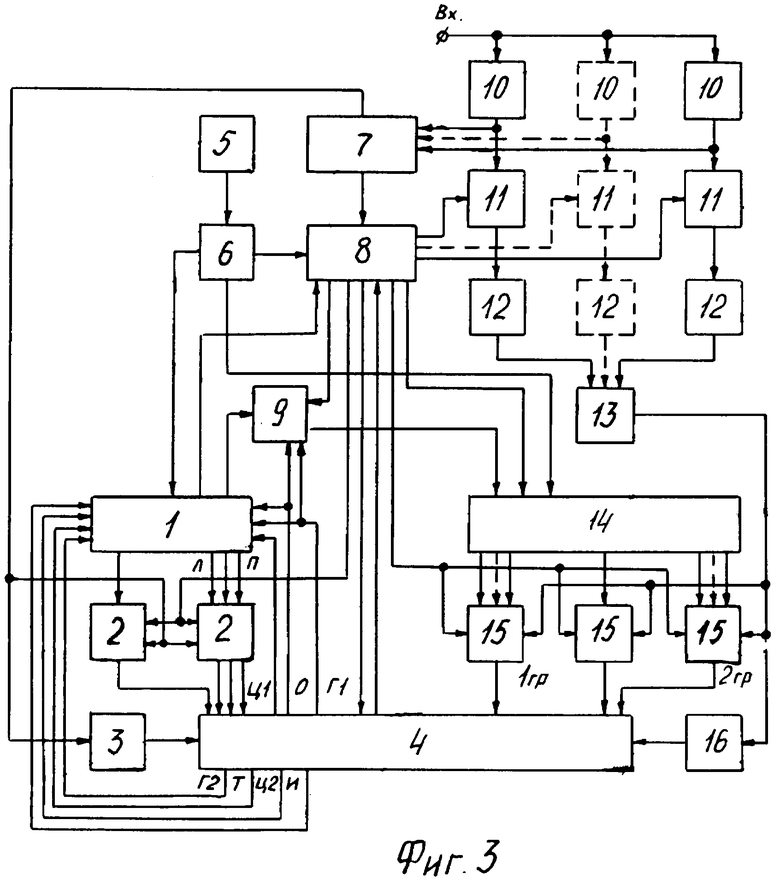
Устройство для поиска шумоподобного сигнала, содержащее управляемый генератор синхронизирующей и информационной псевдослучайных последовательностей (СП и ИП), выходы которого подключены к видеочастотным входам групп коререляторов, выходы которых соединены с четырьмя входами решающего блока, пятый вход которого подключен к выходу формирователя порога, четыре выхода решающего блока соединены с входами управляемого генератора СП и ИП, отличающееся тем, что, с целью сокращения времени поиска, введены три группы корреляторов, канальные блоки памяти, входные полосовые фильтры, анализатор помех, полосовые фильтры, сумматор, генератор СП, формирователь начального состояния, дополнительный формирователь порога, блок управления и формирователь импульсов, причем выходы входных полосовых фильтров подключены к входам анализатора помех и входам канальных блоков памяти, выходы которых через полосовые фильтры и сумматор подключены к входам корреляторов и дополнительного формирователя порога, выход которого соединен с входом решающего блока, видеочастотные входы корреляторов подключены к выходам генератора СП, один вход которого через формирователь импульсов подключен к опорному генератору, другой вход соединен с выходом формирователя начального состояния, а третий - с выходом блока управления, второй выход которого соединен с первым входом формирователя начального состояния, третий выход подключен к решающему блоку, четвертый - ко входам сброса корреляторов, радиочастотные входы которых соединены со входом формирователя порога и первым выходом анализатора помех, второй выход которого соединен с блоком управления, пятый выход блока управления соединен со входами сброса корреляторов, выходы которых соединены с решающим блоком, второй вход блока управления соединен с решающим блоком, а третий - с управляемым генератором СП и ИП, четвертый вход соединен со вторым выходом формирователя импульсов, два выхода решающего блока соединены со вторым и третьим входами формирователя начального состояния и входами управляемого генератора СП и ИП, выход которого подключен к четвертому входу формирователя начального состояния, третий выход формирователя импульсов соединен с входом управляемого генератора СП и ИП.

