Предлагаемое устройство поиска и слежения относится к области широкополосных систем радиосвязи, в которых используются шумоподобные сигналы.
Известны устройства поиска и обнаружения шумоподобных сигналов, например, описанные в книгах "Шумоподобные сигналы в системах передачи информации", Сов.радио, Москва, 1973 г, под ред. Пестрякова В.Б.; "Статистическая теория приема сложных сигналов", Тузов Г.И. М.: Сов.радио, 1977 г.
Описанные в книгах устройства обладают существенным недостатком: не обеспечивают высокой помехозащищенности поиска шумоподобных сигналов с неизвестной или меняющейся несущей частотой за малое время поиска.
Известны и другие устройства поиска шумоподобного сигнала, например, описанные в книге "Радиосистемы передачи информации", М.: Радио и связь, 1982 г, под ред. Теплякова И.М. и авторских свидетельствах: "Устройство поиска широкополосных сигналов": №331 490, МКИ Н 04 B 1/10, №425367 МКИ Н 04 B 1/10.
В этих устройствах поиска шумоподобного сигнала используются многоканальные корреляторы и схемы автоматической подстройки частоты.
Однако основным их недостатком является то, что обеспечение высокой помехозащищенности обнаружения шумоподобного сигнала может быть достигнуто за счет уменьшения шумовой полосы корреляторов и перестройки гетеродина с шагом по частоте, равным шумовой полосе корреляторов. А это приводит к увеличению времени поиска по несущей частоте. Кроме того, для уменьшения времени ввода в синхронизм по несущей частоте необходимо использовать АПЧ с большим быстродействием, что приводит к ухудшению помехоустойчивости синхронизации.
Наиболее близким до технической сути к предлагаемому изобретению является устройство поиска и обнаружения шумоподобного сигнала, которое выбрано в качестве прототипа.
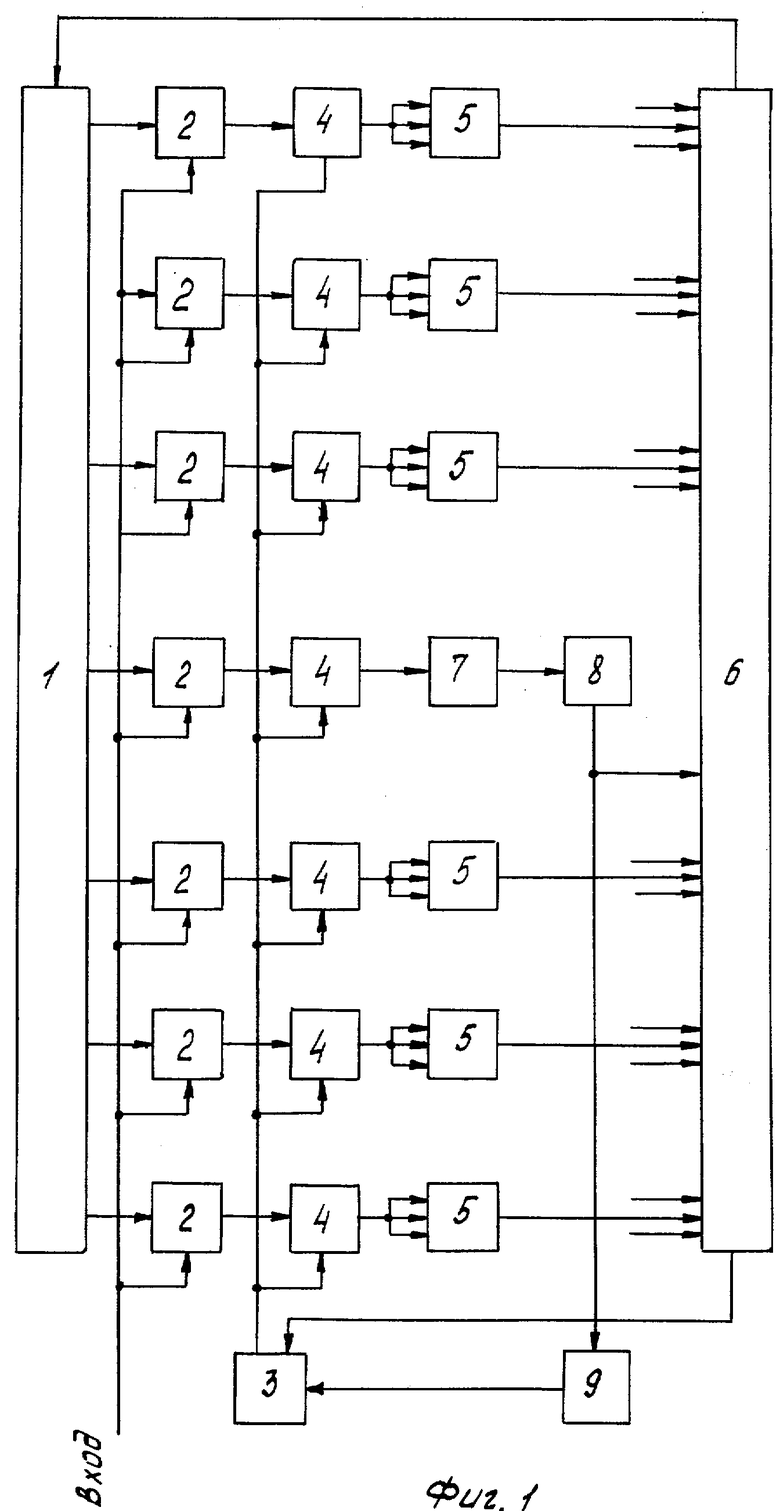
Блок-схема прототипа представлена на фиг.1 со следующими обозначениями:
1 - управляемый генератор опорных ПСП;
2 - перемножитель;
3 - управляемый синтезатор частот;
4 - смеситель;
5 - накопитель со сбросом;
6 - блок принятия решений;
7 - блок временного сжатия;
8 - перестраиваемый интегратор;
9 - устройство управления частотной автоподстройкой.
Устройство имеет следующие функциональные связи. Входной шумоподобный сигнал поступает на вход устройства, который соединен с блоком принятия решений 6 и с радиочастотными входами перемножителей 2, выходы которых соединены с сигнальными входами смесителей 4, выходы которых, кроме одного, соединены через накопители со сбросом 5 со входами блока принятия решений 6, один выход которого соединен с входом управляемого синтезатора частот 3, а другой выход - с управляемым генератором опорных ПСП1, выходы которого соединены с видеочастотными входами перемножителей 2, а выход смесителя центрального корреляционного канала 4 через блок временного сжатия 7 соединен с входом перестраиваемого интегратора 8, выход которого соединен с входом блока принятия решений 6 и входом устройства управления частотной автоподстройкой 9, выход которого соединен со входом управляемого синтезатора частот 3, подключенного к гетеродинным входам смесителей 4.
Устройство (прототип) работает следующим образом.
Входной шумоподобный сигнал подается на радиочастотные входы перемножителей 2 корреляционных каналов, на видеочастотные входы которых поступают ПСП с управляемого генератора 1, сдвинутые на τо, где τо - длительность элементарного импульса генератора ПСП. С выхода каждого корреляционного канала, состоящего из перемножителя 2, смесителя 4 и накопителя со сбросом 5, кроме центрального канала, сигналы поступают на блок принятия решений 6, в котором максимальный из них сравнивается с порогом. В режиме поиска, до тех пор пока сигнал ни с одного из корреляторов не превысит порог, происходит перестройка опорных сигналов по несущей частоте в диапазоне неопределенности несущей частоты входного шумоподобного сигнала и по задержке в пределах периода ПСП. Сдвиг опорных сигналов по задержке осуществляется управляемым генератором ПСП1, а по частоте - управляемым синтезатором частот 3, по командам с блока 6.
В режиме обнаружения происходит превышение какого-либо сигнала с выходов корреляторов над порогом. В зависимости от того, в каком из каналов обнаружен сигнал, блок принятия решений 6 вырабатывает сигнал для управляемого генератора ПСП1, который изменяет фазу опорных ПСП до тех пор, пока сигнал не будет обнаружен в центральном корреляционном канале. При этом начинается подстройка входного сигнала по частоте, для чего используется сигнал с выхода смесителя только центрального корреляционного канала. Этот сигнал поступает на блок временного сжатия, осуществляющего запись входного сигнала и последующее считывание его с более высокой скоростью. Время накопления (время записи) равно Тн, а время считывания сжатой во времени копии сигнала равно Тс, таким образом за время Тн происходит Тн/Тс циклов считывания сжатого сигнала. Сжатый сигнал поступает на перестраиваемый интегратор, на котором происходит накопление его на различных частотах. Так за время (0; Тс) сигнал накапливается в интеграторе на частоте fo, за время (Тс; 2Тс) - на частоте fo+Δf и т.д. Далее сигнал, накопленный в интеграторе, поступает на блок принятия решений 6 и на устройство управления частотной автоподстройкой 9, в которой на основании сравнения сигналов, поступающих с перестраиваемого интегратора за время Тн, формируется управляющее напряжение, пропорциональное отклонению частоты входного сигнала от выбранной опорной частоты fo+кΔf, где к - номер выбранной опорной частоты. Работа устройства управления частотной автоподстройкой осуществляется в два этапа. Сначала определяется номер частоты, на которой произошло максимальное накопление сигнала и вырабатывается сигнал управления, пропорциональный величине i-к, по которому частота входного сигнала смещается таким образом, что максимальный сигнал накапливается на частоте fo+кΔf. На втором этапе происходит точная подстройка частоты входного сигнала до частоты fo+кΔf. Для этого сравниваются сигналы с выхода перестраиваемого интегратора 8 на частотах fo+(к-1)Δf и fo+(к+1)Δf и формируется сигнал управления, по которому частота смещается блоком 3 таким образом, что накопленные сигналы на частотах fo+(к-1)Δf и fo+(к+1)Δf уравниваются по величине. Последнее обстоятельство указывает на то, что частота входного сигнала равна среднеарифметической между частотами fo+(к-1)Δf и fo+(к+1)Δf, то есть равна fo+кΔf.
Устройство поиска и обнаружения (прототип) имеет существенный недостаток:
большое время поиска и обнаружения широкополосного сигнала о неизвестной или изменяющейся несущей частотой, так как в устройстве-прототипе введен дополнительный поиск по несущей частоте в зоне ее априорной неопределенности без расширения полосы пропускания интегратора. Для уменьшения времени поиска в устройстве-прототипе предусмотрено введение в каждый корреляционный канал "гребенки" интеграторов, перекрывающей всю зону априорной неопределенности несущей частоты шумоподобного сигнала или ее часть. В этом случае значительно усложняется система поиска, возрастают габариты, снижается точность и стабильность ее характеристик, что в конечном итоге не позволяет реализовать высокую помехозащищенность при малом времени поиска.
Целью предлагаемого устройства поиска и слежения за широкополосным сигналом является уменьшение времени поиска шумоподобного сигнала с неизвестной или изменяющейся несущей частотой.
Эта цель достигается тем, что в устройство поиска и слежения за широкополосным сигналом (в прототип), содержащее управляемый генератор опорных ПСП, перемножители, смесители, управляемый синтезатор частот, блок временного сжатия, блок принятия решений, введены широкополосные фильтры, узкополосный фильтр, коммутатор, формирователь сигналов управления, анализатор спектра на основе Z-преобразования с ЛЧМ.
Блок-схема предлагаемого устройства представлена на фиг.2 со следующими обозначениями:
1 - управляемый генератор опорных ПСП;
2 - перемножитель;
3 - управляемый синтезатор частот;
4 - смеситель;
5 - широкополосный фильтр;
6 - узкополосный фильтр;
7 - коммутатор;
8 - формирователь сигналов управления;
9 - блок временного сжатия;
10 - анализатор спектра на основе Z-преобразования с ЛЧМ;
11 - блок принятия решений,
Устройство имеет следующие функциональные связи. Входной шумоподобный сигнал поступает на радиочастотные входы перемножителей 2, выходы которых подключены к сигнальным входам смесителей 4, выходы которых, кроме одного, соединены через широкополосные фильтры 5 со входами блока временного сжатия 9, а выход смесителя первого корреляционного канала соединен со входами широкополосного 5 и узкополосного 6 фильтров, выходы которых через коммутатор 7 подключены ко входу блока временного сжатия 9, выход которого через анализатор спектра 10 соединен со входом блока принятия решений 11, первый выход которого соединен со входом управляемого синтезатора частот 3, подключенного к гетеродинным входам смесителя 4, второй выход соединен со входом управляемого генератора ПСП1, один выход которого соединен со входом формирователя сигналов управления 8, а другие - с видеочастотными входами перемножителей 2, и третий выход блока принятия решений 11 соединен со входами коммутатора 7, управляемого генератора ПСП1 и формирователя сигналов управления 8, первый выход которого подключен ко входу блока временного сжатия 9, второй - ко входу анализатора спектра 10 и третий - ко входу блока принятия решений 11.
Предлагаемое устройство поиска и слежения работает следующим образом.
Входной шумоподобный сигнал поступает на радиочастотные входы перемножителей 2, на видеочастотные входы которых подаются синхронизирующие псевдослучайные последовательности с блока 1, сдвинутые друг относительно друга на τо, где τо - длительность элементарного импульса. Сигналы с выходов перемножителей 2 в каждом корреляторе подаются на входы смесителей 4, частота выходных сигналов которых меняется при изменении частоты управляемого синтезатора, подключенного к гетеродинным входам. Сигналы на выходе смесителей фильтруются широкополосными фильтрами 5, полоса пропускания которых может быть равна всей полосе неопределенности несущей частоты входного шумоподобного сигнала или составлять часть этой полосы. Наличие фильтров 5 в каждом корреляторе СП является обязательным, так как позволяет избежать перекрытия спектральных составляющих входного сигнала после его дискретизации в блоке временного сжатия 9 (БВС). С выхода фильтров 5 всех корреляционных каналов, кроме первого, сигналы непосредственно подаются на входы БВС 9. В первом корреляционном канале в режиме поиска по задержке в пределах всей базы и по частоте в пределах всей полосы неопределенности сигнал с выхода широкополосного фильтра 5 поступает на вход БВС через коммутатор 7, управляемый сигналом, поступающим с блока принятия решений 11.
Блок временного сжатия 9 выполняет следующие операции:
1 - дискретизация входных сигналов по времени с частотой, выбранной в соответствии с теоремой Котельникова;
2 - непрерывная параллельная запись в память аналоговых выборок сигналов всех корреляционных каналов;
3 - непрерывное последовательное считывание из памяти выборок сигналов, записанных за время Тн, со скоростью, обеспечивающей считывание всех сигналов за время Тобр≤Тн.
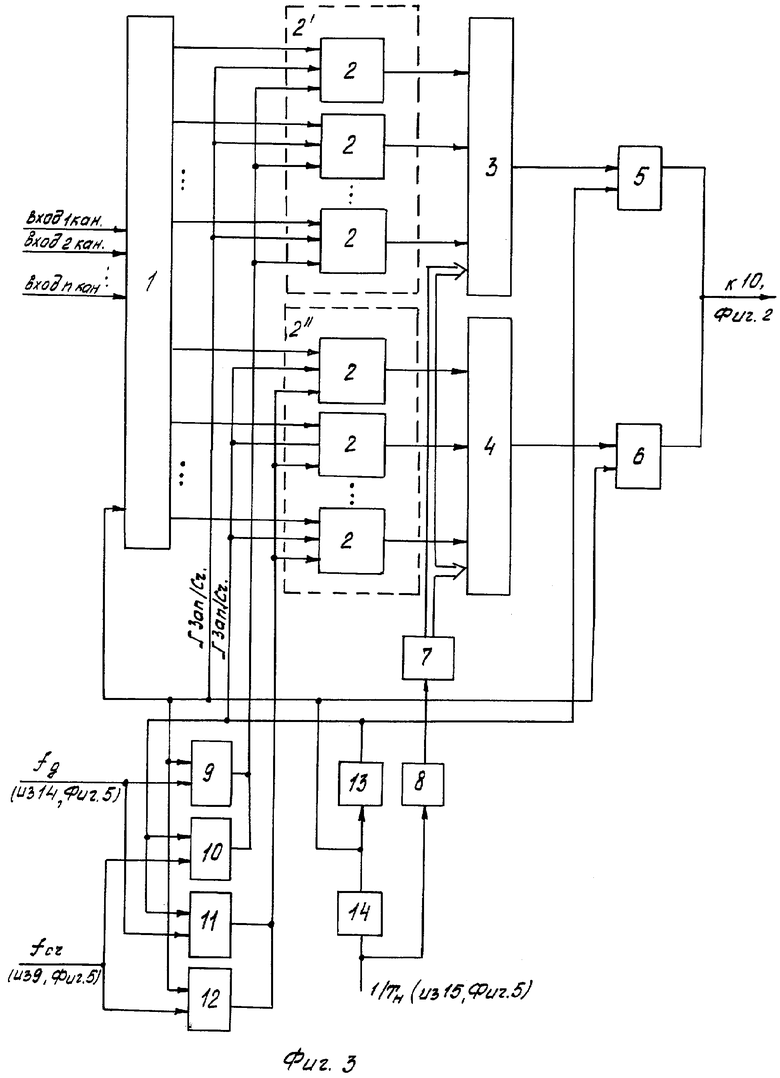
Блок временного сжатия 9 может быть реализован различными способами, как цифровыми, так и аналоговыми. В частности он может быть выполнен так, как показано на фиг.3, для которой введены следующие обозначения:
1, 3, 4 - коммутатор;
2 - аналоговое запоминающее устройство (АЗУ);
2', 2'' - блок АЗУ;

7 - счетчик;
8 - умножитель на n;
13 - инвертор;
14 - Т-триггер.
Работает блок временного сжатия следующим образом. Сигналы с выходов всех корреляционных каналов подаются на входы коммутатора 1, который поочередно подключает их к АЗУ блока 2' и блока 2'' по команде, формируемой в Т-триггере 14 из сигнала с частотой 1/Тн. Управляющие сигналы с выходов Т-триггера 14 и инвертора 13 коммутируют ключи 5, 6, 9, 10, 11 и 12 таким образом, что при подключении входных сигналов коммутатором 1 к блоку 2' осуществляется параллельная запись в его АЗУ выборок этих сигналов в течение времени Тн, взятых с частотой fg. В то же самое время АЗУ блока 2'' осуществляют считывание выборок сигналов о частотой fсч=fg·K, где K - коэффициент сжатия. При этом коммутатор 4 управляется сигналами с выхода счетчика 7 таким образом, что выходы всех АЗУ блока 2 последовательно коммутируются на вход ключа 6 и далее на выход блока временного сжатия. Таким образом на выходе образуется последовательность выборок сигналов всех корреляционных каналов, считанная со скоростью fсч за время Тобр. При подключении входов БВС к блоку АЗУ2′′ осуществляется параллельная запись выборок сигналов в этот блок и последовательное считывание выборок из АЗУ блока 2′. Коэффициент сжатия K определяется числом корреляционных каналов n и временем, необходимым для вычисления коэффициентов Фурье в блоке анализатора спектра. Сигналы с частотой fg, fсч и 1/Tн поступают из формирователя сигналов управления 8 (фиг.2).
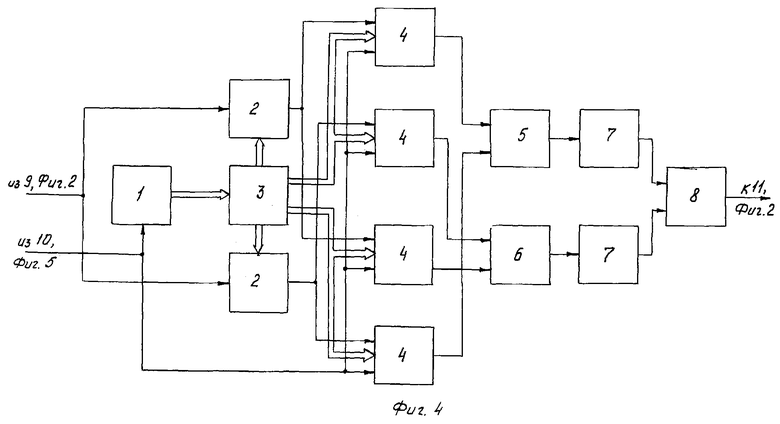
Последовательность аналоговых выборок с выхода блока временного сжатия поступает на вход анализатора спектра 10, в котором поочередно вычисляются коэффициенты Фурье сигналов всех корреляционных каналов. Вычисление коэффициентов Фурье может осуществляться различными методами, гребенкой интеграторов, дискретным преобразованием Фурье (ДПФ), быстрым преобразованием Фурье (БПФ) и т.д., но одним из наиболее эффективным является алгоритм Z-преобразования с использованием ЛЧМ - фильтрации, описанный в книге Д.Рабинер, Б.Гоузд "Теория и применение цифровой обработки сигналов", М.: Мир, 1978 г. Функциональная схема анализатора спектра, работающего по этому алгоритму приведена на фиг.4, для которой введены следующие обозначения:
1 - адресный счетчик;
2 - дискретный умножающий ЦАП;
3 - постоянное запоминающее устройство;
4 - цифроаналоговый процессор;
5, 8 - сумматор;
6 - вычитатель;
7 - квадратор.
Анализатор спектра работает следующим образом, В течение времени Тс=N/fсч происходит считывание N выборок сигнала одного из корреляционных каналов, из АЗУ БВС с частотой fсч, которые подаются на входы двух дискретных умножающих ЦАП2, в которых происходит их умножение на К-разрядные выборки косинусной и синусной составляющих ЛЧМ - радиоимпульса, записанные в постоянном запоминающем устройстве 3. В качестве постоянного запоминающего устройства может быть использована одна или несколько микросхем ПЗУ, выпускаемых промышленностью. Подробно с типами, объемом и организационной структурой памяти ПЗУ можно познакомиться в книге "Полупроводниковые запоминающие устройства и их применение" под ред. Гордонова А.Ю., М.: Радио и связь, 1981 г. Выбор нужных выборок ЛЧМ - радиоимпульса из ПЗУ осуществляется в соответствии с адресными последовательностями счетчика 1, тактируемого частотой fсч поступающей из формирователя сигналов управления 8 (фиг.2). Функциональная схема дискретного умножающего ЦАП 2 (фиг.4) и описание принципов работы изложены в книге Гитиса Э.И. и Пискулова Е.А. "Аналого-цифровые преобразователи", М., 1981 г.
Результат выполнения операции  первым дискретным умножающим ЦАП заносится в N ячеек памяти первого и третьего цифроаналоговых процессоров, а результат выполнения операции
первым дискретным умножающим ЦАП заносится в N ячеек памяти первого и третьего цифроаналоговых процессоров, а результат выполнения операции  вторым дискретным умножающим ЦАП заносится в N ячеек памяти второго и четвертого цифроаналоговых процессоров. Таким образом в течение N тактовых периодов частоты fсч происходит ввод сигналов в цифро-аналоговые процессоры с предварительным умножением.
вторым дискретным умножающим ЦАП заносится в N ячеек памяти второго и четвертого цифроаналоговых процессоров. Таким образом в течение N тактовых периодов частоты fсч происходит ввод сигналов в цифро-аналоговые процессоры с предварительным умножением.
Цифроаналоговые процессоры 4 реализуют операции быстрой свертки записанного в памяти дискретного сигнала с косинусной или синусной составляющими ЛЧМ - радиоимпульса, представленными m-разрядным кодом и записанными в постоянное запоминающее устройство 3, причем первый реализует операцию

второй

третий

четвертый

где М - целое положительное число, определяющее расстояние между спектральными отсчетами ΔF.
ΔF=fg/M
k - целое положительное число, в диапазоне от 1 до М/2, которое определяет номер текущего спектрального отсчета аналогового сигнала, поступающего на вход БВС 9 (фиг.2).
Функциональная схема цифроаналогового процессора 4, реализованного на базе микросхемы 528 XKI, приведена в И13.038.007 ТО. Время вычисления сверток определяется следующим выражением:
 где
где
fo - частота сдвига выборок ЛЧМ - радиоимпульса.
Вычисление сверток и, следовательно, сдвиг выборок ЛЧМ - радиоимпульса происходит только после того, как произошло заполнение N ячеек памяти цифро-аналоговых процессоров. Поэтому перед началом вычисления сверток в формирователе сигналов управления 8 (фиг.2) происходит коммутация сигналов и на тактовые входы адресного счетчика 1 (фиг.4) и цифроаналоговых процессоров 4 подается сигнал частотой fо. Значения сверток на К-ом этапе, вычисленные в первом и четвертом цифроаналоговых процессорах, суммируются в сумматоре 5, а вычисленные во втором и третьем процессорах вычитаются в вычитателе 6. Значения суммы и разности возводятся в квадрат в устройствах 7 и после этого суммируются во втором сумматоре 8. Практическая реализация устройств 5, 6, 7, 8 подробно описана в "Полупроводниковой схемотехнике", У.Титце, К.Шенц, М.: Мир, 1982 г. и в книге "Применение прецезионных аналоговых ИС.", А.Г.Алексеенко, Е.А.Коломбет, Г.И.Стародуб, М.: Сов.радио, 1980 г.
Таким образом, в результате операций свертки суммирования и вычитания, возведения в квадрат с последующим суммированием, происходящих в течение М/2 тактов частоты fo, получается последовательность возведенных в квадрат значений коэффициентов Фурье, которая поступает на вход блока принятия решении 11 (фиг.2).
В блоке принятия решений 11 в течение времени Тн происходит выбор максимального значения квадрата коэффициента Фурье из множества значений, вычисленных для сигналов всех корреляционных каналов. Затем это максимальное значение сравнивается с порогом, и после этого принимается решение по следующему алгоритму. В случае, если максимальный сигнал не превосходит порога, с выхода блока принятия решений 11 отсутствует команда, поступающая на блок 1, и последний осуществляет перестройку опорных СП на интервал n·τo, т.е. продолжается поиск синхросигнала. Если максимальное значение квадрата коэффициента Фурье превысит порог, то в блоке принятия решений 11 определяются код временной и код частотной позиций, на которых произошло это превышение и в соответствии о этим вырабатываются следующие сигналы:
1. Управляемого генератора ПСП1, который изменяет фазу опорных ПСП таким образом, что сигнал окажется в первом корреляционном канале (до тех пор, пока сигнал не будет обнаружен в первом корреляционном канале).
2. Для управляемого синтезатора частот, который изменяет частоту на гетеродинных входах смесителей таким образом, что частотная позиция, на которой сигнал превысил порог, оказывается на выходе смесителя 4 в зоне узкополосного фильтра 6.
3. Сигнал, управляющий коммутатором 7 таким образом, что ко входу блока временного сжатия 9 подключается выход узкополосного фильтра 6. Этот же сигнал подается на входы формирователя сигналов управления 8 и управляемого генератора ПСП1, работа которых описана выше.
После выполнения этих команд начинается точная подстройка входного сигнала по частоте в зоне узкополосного фильтра 6 с центральной частотой fo, для чего используется сигнал с выхода первого корреляционного канала. Полоса фильтра 6 определяется шумовой полосой корреляторов и равна Δf=1/Тн. Точная подстройка сигнала осуществляется в два этапа. На первом этапе происходит поиск сигнала по частоте в зоне фильтра 6. Для этого в формирователе сигналов управления 11 происходит коммутация и на вход БВС 9 и блок принятия решений подаются сигналы с частотами fg, и 1/Тн1, при этом алгоритм работы БВС и анализатора спектра 11 не меняется. Частота дискретизации f и время накопления Tн1 определяются следующим образом:
fg1≥2Δf, где
 где
где
N - длина памяти АЗУ БВС.
В анализаторе спектра происходит вычисление М/2 значений квадратов коэффициентов Фурье в полосе Δf сигнала первого корреляционного канала. В блоке принятия решений 11 выбирается максимальное из этих значений и сравнивается с порогом. В случае превышения порога K-ым значением вырабатывается сигнал, по которому происходит перестройка синтезатора таким образом, что частотная позиция K-го значения смещается в центр узкополосного фильтра 3. Если порог не будет превышен, принимается решение об отсутствии сигнала.
На втором этапе происходит точная подстройка частоты входного сигнала до частоты fo. Положение частоты fo соответствует (M/2)/2 значению квадрата коэффициента Фурье в спектре сигнала. Поэтому для точной подстройка частоты сравниваются  значения квадратов коэффициентов Фурье и формируется сигнал управления, по которому частота управляемого синтезатора 3 смещается в ту или иную сторону.
значения квадратов коэффициентов Фурье и формируется сигнал управления, по которому частота управляемого синтезатора 3 смещается в ту или иную сторону.
Функциональная схема формирователя сигналов управления приведена на фиг.5, для которой введены следующие обозначения:
1 - делитель;
2 - делитель;
3 - схема И;
4 - счетчик;
5 - счетчик;
6 - дешифратор состояния N
7 - дешифратор состояния M/2
8 - схема НЕ;
9 - схема И;
10 - схема ИЛИ;
11 - делитель;
12 - делитель;
13 - делитель;
14 - коммутатор;
15 - коммутатор.
Формирователь работает следующим образом. На выходе делителей 1 и 2 в результате деления тактовой частоты, приходящей из блока 1 (фиг.2), получаются частоты fo и fсч. В течение N тактов сигнал c частотой fсч, проходит через схему И 9 и далее через схему ИЛИ 10 на выходы формирователя, подключенные к входам блоков 9 и 10 (фиг.2). В течение следующих М/2 тактов на выходы формирователя непосредственно и через схему ИЛИ 10 проходит сигнал частотой fo, тогда как на выходе схемы И 9 сигнал отсутствует. Затем происходит установка счетчиков 4 и 5 в начальное состояние и алгоритм работы этой части схемы повторяется. В результате деления частоты fсч в делителях 11 и 13 на входы коммутатора 14 подаются сигналя с частотами fg и fg1,а в результате деления частоты 1/Тн в делителе 12 на входы коммутатора 15 подаются сигналы с частотами 1/Тн и 1/Тн1. В зависимости от сигнала, приходящего из блока принятия решений 11 (фиг.2), на выходы коммутаторов 14 и 15, подключенных к блоку 9 (фиг.2), проходят сигналы с частотами fg и 1/Тн или с частотами fg1 и 1/Тн1.
Функциональная схема управляемого генератора ПСП1 (фиг.2) приведена на фиг.6, для которой введены следующие обозначения:
1 - опорный генератор тактовой частоты;
2 - схема И;
3 - схема И;
4 - счетчик;
5 - схема НЕ;
6 - коммутатор;
7 - дешифратор состояния n;
8 - генератор псевдослучайной последовательности;
9 - регистр;
10 - регистр;
11 - коммутатор;
12 - коммутатор;
13 - дешифратор нулевого состояния;
14 - делитель.
Управляемый генератор ПСП работает следующим образом. Сигнал с выхода генератора псевдослучайной последовательности 8 сдвигается на n тактов частоты fm в регистре 9 и затем на r тактов в регистре 10, выходные сигналы которого, кроме первого, непосредственно подаются на выходы управляемого генератора. Первый разряд регистра подается на выход генератора через коммутатор 12, управляемый сигналом, приходящим из блока принятия решений 11 (фиг.2). Длина регистра 10 r≫m, где m - степень генераторного полинома псевдослучайной последовательности. Нулевое состояние всех разрядов регистра 10 выделяется в дешифраторе 13, сигнал которого делится на число периодов псевдослучайной последовательности, в течение которых осуществляется поиск сигнала на одной временной позиции. Сигнал с выхода делителя 14 обнуляет счетчик 4, который после этого считает до состояния n, выделяемое дешифратором 7. В течение счета на тактовые входы генератора 8 и регистров 9 и 10 частота fm не подается, а после дешифрации состояния n частота fm через схему "И" 3 проходит на тактовые входы 8, 9 и 10. Таким образом осуществляется задержка опорного сигнала относительно входного на n тактов. В таком режиме схема работает до тех пор, пока на управляющие входы коммутаторов 6 и 12 не придет сигнал из блока принятия решений 11 (фиг.2). Этот сигнал подключает выход опорного генератора 1 ко входам 8, 9 и 10, а также выход коммутатора 11 к выходу первого канала управляемого генератора. Коммутатор 11 управляется кодом номера корреляционного канала, на котором был обнаружен сигнал. Таким образом опорный сигнал первого канала оказывается синхронизированным со входным шумоподобным сигналом.
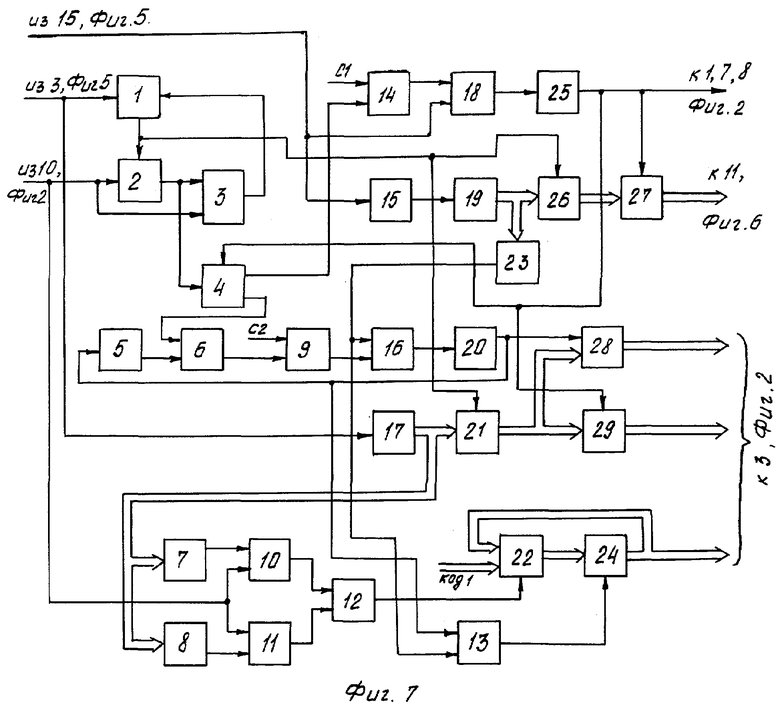
Функциональная схема блока принятия решений 11 (фиг.2) приведена на фиг.7, для которой введены следующие обозначения:
1,13,16,18 - схема И;
3,9,12,14 - компаратор;
4 - коммутатор;
5 - схема НЕ;
6 - ключ;
7 - дешифратор состояния 
8 - дешифратор состояния 
15 - умножитель на n;
17, 19 - счетчик;
20, 25 - Т-триггер;
22 - арифметическо-логическое устройство,
23 - дешифратор состояния 1.
Блок принятия решений работает следующим образом. Сигнал в виде значений квадратов коэффициентов Фурье из анализатора спектра поступает на вход схемы выбора максимума, включавшей регистр 2, компаратор 3 и схему И1. Максимальное значение на первом этапе обработки входного сигнала, т.е. при поиске во всей полосе неопределенности сигнала по частоте и задержке, сравнивается с порогом C1. Знак превышения порога, стробируемый в момент окончания обработки сигналов, записанных в блоке временного сжатия 9 (фиг.2), устанавливает Т-триггер 25 в единичное состояние, которое осуществляет запись кодов корреляционного канала и частотной позиции, соответствующих максимальному значению квадрата коэффициента Фурье, в регистры 27 и 29. Этот же сигнал управляет коммутатором 4 таким образом, что выход регистра 2 подключается ко входу ключа 6, и этот же сигнал подается на выход блока принятия решений. На втором этапе обработки входного сигнала, т.е. при поиске в зоне шумовой полосы корреляторов, максимальное значение квадрата коэффициента Фурье сравнивается с порогом C2. Знак превышения порога, стробируемый в момент окончания обработки сигнала первого корреляционного канала, записанного в блоке временного сжатия 9 (фиг.2). устанавливает Т-триггер 20 в единичное состояние, которое осуществляет запись кода частотной позиции, соответствующей максимальному значению квадрата коэффициента Фурье, в регистр 28. Этот же сигнал после инвертирования отключает выход коммутатора 4 от входа компаратора 9. На третьем этапе обработки входного шумоподобного сигнала осуществляется слежение за меняющейся несущей частотой. Схема слежения выполнена по принципу частотного дискриминатора. В регистры 10 и 11 записываются соответственно значения квадратов коэффициентов Фурье по командам, формируемым путем выделения состояний счетчика частотных позиций 17 в дешифраторах 7 и 8. Эти значения сравниваются в компараторе 12, знак рассогласования которого подается на управляющий вход АПУ 22. В зависимости от знака рассогласования в АПУ к коду частотной позиции либо добавляется, либо из него вычитается код единицы. Результат выполнения операции записывается в регистр 24 в момент окончания обработки сигнала первого корреляционного канала по команде, поступающей с дешифратора единичного состояния 23 счетчика корреляционных каналов 19. Коды с регистров 29, 28 и 24 поступают на выход блока принятия решений и далее на вход управляемого синтезатора частот, и определяют частоту синтезатора в пределах соответственно крупной, средней и мелкой частотных сеток.
Предлагаемое устройство позволяет при той же помехозащищенности значительно сократить время поиска и обнаружения входного шумоподобного сигнала с неизвестной или изменяющейся несущей частотой. Для доказательства этого проведем сравнительный анализ времени поиска предлагаемым устройством и устройством-прототипом, исходя из следующих данных:
n = 8;
Всп = 2047;
Tн = 2 мс;
Тн1 = 10 мс;
ΔF = 200 кГц;
Δf = 500 Гц, где
n - число корреляционных каналов,
Всп - база сигнала СП;
Tн - время накопления входного сигнала;
Тн1 - время накопления входного сигнала, в режиме подстройки по частоте;
ΔF - диапазон неопределенности несущей частоты;
Δf - шумовая полоса коррелятора СП.
Время поиска сигнала определяется следующим выражением

Тп1 - время поиска сигнала во всей полосе неопределенности несущей частоты;
Тп2 - время поиска сигнала в зоне шумовой полосы корреляторов.
Для устройства-прототипа

Тп2 складывается из времени записи сигнала в блок БВС (фиг.1) - Тн1 и времени обработки записанного сигнала - Тн1. Поэтому Tп2=2Tн1=20 мс.
Подставив Tп1 и Tп2 в формулу (I), получаем
Tп = 204,7с + 20мс = 204,72с
Теперь покажем, что предлагаемое устройство может обеспечить на каждом этапе поиска сигнала по задержке поиск по частоте сразу же во всей полосе ΔF = 200 кГц.
Для обеспечения работы предлагаемого устройства необходимо, чтобы выполнялось условие:
Тобр≤Тн, где
Тобр - время обработки записанных в блоке ВВС9 (фиг.2) сигналов

Тс - время считывания сигнала из памяти блока БВС;
То - время вычисления свертки сигнала ЛЧМ - радиоимпульсом.

Согласно теореме Котельникова fg=2ΔF=400 кГц. Быстродействие существующих элементов АЗУ позволяет реализовать fсч=5 МГц.
Поэтому 
 где
где
fo - частота сдвига выборок ЛЧМ - радиоимпульса. Примем fo=fсч
M - целое число, определяющее расстояние между спектральными отсчетами.
Если расстояние между спектральными отсчетами равно шумовой полосе корреляторов, то M=N, где
N - число выборок сигнала, записанного в блоке БВС9 (фиг.2)
N=Tн·fg

Подставив To и Tc в формулу (2), получаем
Tобр=8(0,16+0,08)≈1,92 мс
Выполнение условия Тобр≤Тн показывает, что предлагаемое устройство может обеспечить поиск сигнала во всей полосе ΔF=200 кГц. Поэтому для предлагаемого устройства

Tп2 определяется так же, как и для устройства прототипа.
Тп2=20 мс.
Подставив Tп1 и Tп2 в формулу (I), получаем
Тп=0,512 c+20 мс=0,533
Таким образом, из данного примера следует, что предлагаемое устройство позволяет значительно уменьшить время вхождения в синхронизм.
Проведем сравнительный анализ предложенного устройства с базовым объектом - серийно выпускаемым приемником широкополосных сигналов "Кулон-III".
Характеристики базового объекта:
В = 2047;
n = 8;
ΔF = 120 кГц;
Δf = 750 Гц;
Tн = 16 мс

Использование предлагаемого устройства для поиска заданного сигнала позволяет значительно сократить время вхождения в синхронизм.
Покажем, что предлагаемое устройство может осуществить поиск сигнала сразу же во всей полосе ΔF=120 кГц

Следовательно, необходимое условие Tобр≤Тн выполняется. Таким образом, время поиска для предлагаемого устройства равно
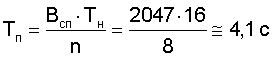
Отсюда следует, что по сравнению с базовым объектом время поиска сокращено примерно в 160 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА И ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840447A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШУМОПОДОБНЫМ СИГНАЛОМ | 1979 |
|
SU1840322A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1983 |
|
SU1840127A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1983 |
|
SU1840292A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1985 |
|
SU1840044A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСВЯЗИ | 1980 |
|
SU1840131A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1978 |
|
SU1840096A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840444A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1986 |
|
SU1840221A1 |


Изобретение относится к области широкополосных систем радиосвязи, в которых используются шумоподобные сигналы. Технический результат - уменьшение времени поиска шумоподобного сигнала в неизвестной или изменяющейся несущей частоте. Сущность изобретения состоит в том, что устройство поиска и слежения за широкополосным сигналом, содержащее блок временного сжатия, решающий блок, первый выход которого через управляемый синтезатор частот подключен к гетеродинным входам смесителей, а второй выход через управляемый генератор псевдослучайных синхронизирующих последовательностей и перемножители соединен с сигнальными входами смесителей. Согласно данному изобретению, в устройство введены широкополосные фильтры, узкополосный фильтр, коммутатор, формирователь сигналов управления, анализатор спектра, причем выходы смесителей, кроме первого, подключены к блоку временного сжатия через широкополосные фильтры, а выход смесителя первого корреляционного канала подключен к входам узкополосного и широкополосного фильтров, выходы которых через коммутатор подключены к блоку временного сжатия, другой вход которого соединен с первым выходом формирователя сигналов управления, второй выход которого соединен с первым входом решающего блока, а третий - с первым входом анализатора спектра, второй вход которого подключен к блоку временного сжатия, а выход - ко второму входу решающего блока, второй выход которого соединен с управляющим входом коммутатора и первым входом формирователя сигналов управления, второй вход которого подключен к дополнительному выходу управляемого генератора псевдослучайных синхронизирующих последовательностей. 7 ил.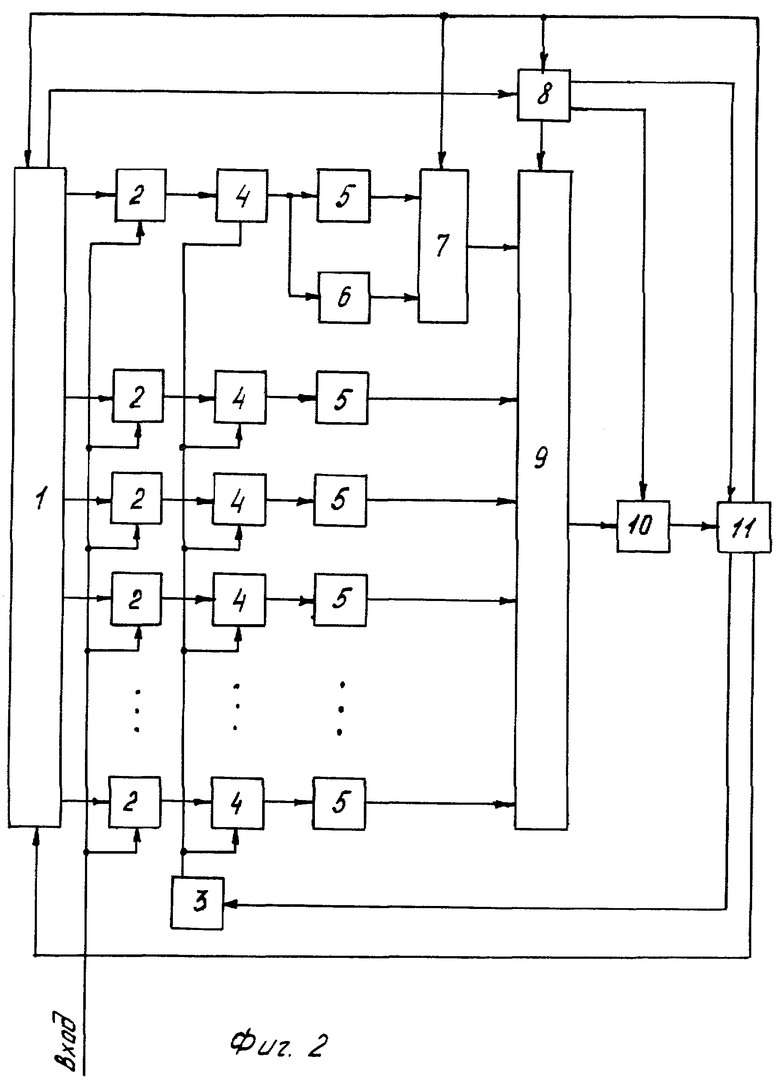
Устройство поиска и слежения за широкополосным сигналом, содержащее блок временного сжатия, решающий блок, первый выход которого через управляемый синтезатор частот подключен к гетеродинным входам смесителей, а второй выход через управляемый генератор псевдослучайных синхронизирующих последовательностей и перемножители соединен с сигнальными входами смесителей, отличающееся тем, что, с целью уменьшения времени поиска шумоподобного сигнала с неизвестной или изменяющейся несущей частотой, введены широкополосные фильтры, узкополосный фильтр, коммутатор, формирователь сигналов управления, анализатор спектра, причем выходы смесителей, кроме первого, подключены к блоку временного сжатия через широкополосные фильтры, а выход смесителя первого корреляционного канала подключен к входам узкополосного и широкополосного фильтров, выходы которых через коммутатор подключены к блоку временного сжатия, другой вход которого соединен с первым выходом формирователя сигналов управления, второй выход которого соединен с первым входом решающего блока, а третий - с первым входом анализатора спектра, второй вход которого подключен к блоку временного сжатия, а выход - ко второму входу решающего блока, второй выход которого соединен с управляющим входом коммутатора и первым входом формирователя сигналов управления, второй вход которого подключен к дополнительному выходу управляемого генератора псевдослучайных синхронизирующих последовательностей.

