Изобретение относится к электрогидравлическим следящим приводам с объемным управлением скоростью исполнительного органа и предназначено для использования в качестве рулевой машины для изменения положения органов управления летательных аппаратов, например газодинамических рулей, рулевых и маршевых ракетных двигателей, створок сопла двигателей по командам с земли или от бортового автономного командного устройства и в других областях машиностроения.
Наиболее распространенными в настоящее время являются следящие приводы, выполненные по схемам, приведенным в книге ГАМЫНИНА Н.С. и др. "Гидравлический следящий привод", изд. Машиностроение, 1968 г. (см. стр.507 рис.7.10) и в патентах США №3095906 и Англии №1152228.
Однако существующие приводы не удовлетворяют современным требованиям по чувствительности к командному сигналу, быстродействию, a также по величине потребляемой мощности.
Ближайшим прототипом предлагаемого изобретения является устройство "Автономный электрогидравлический следящий привод", с объемным управлением".
Данный прототип выполнен из основного насоса с узлом управления производительностью и предохранительным клапаном; вспомогательного насоса с узлом поддавливания, с клапаном подпитки и предохранительным клапаном; нерегулируемого гидродвигателя; узла реверса гидродвигателя; системы коррекции скорости штока гидродвигателя в зависимости от скорости объекта управления во время отработки командного сигнала и устройства обратной связи, соединенных между собой гидравлическими и электрическими связями, а жесткой связью с источником крутящего момента и объектом управления, например рулями ракеты.
Данный прототип более совершенен по сравнению с известными устройствами данного типа.
Однако его существенным недостатком является низкая точность и нестабильность отработки управляющего сигнала, а также повышенное потребление мощности на режиме отсутствия управляющих сигналов, что приводит к повышению веса бортовых источников питания.
Целью предлагаемого изобретения является устранение вышеотмеченных недостатков прототипа и улучшение основных технических характеристик привода, а именно:
1) повышение статической точности привода и чувствительности к управляющему сигналу;
2) улучшение динамических характеристик привода;
3) снижение потребляемой мощности от бортового источника питания;
4) уменьшение веса конструкции.
Эти цели достигаются тем, что:
введена экономичная система управления производительностью основного насоса, для которой требуются малые расходы рабочей жидкости при низких давлениях как при отсутствии, так и при действии управляющих сигналов, представляющая собой двухкаскадный гидроусилитель, выполненный из системы дросселей постоянного и переменного сечений, гидравлически соединенных между собой и управляющей полостью сервопоршня, а жесткой обратной связью с объектом регулирования (люлькой основного насоса). Это позволило уменьшить размеры и потребляемую мощность вспомогательного насоса, а также применить реверс потока рабочей жидкости путем изменения положения люльки основного насоса с переходом через положение нулевой производительности.
За счет введения переменного дросселя специальной конструкции, позволяющего получить значительные изменения его проходных сечений при малых перемещениях втулки 1-го каскада гидроусилителя и перестановочных сил при малой мощности управляющих сигналов, в совокупности с примененной жесткой обратной связью от объекта регулирования, достигается повышение статической точности и чувствительности к управляющему сигналу, а также улучшение динамических свойств привода.
Применение насоса реверсируемой производительности позволяет дополнительно снизить величину потребляемой мощности на холостом ходу (т.е. при отсутствии управляющих сигналов) путем установки люльки в нулевое положение (в результате чего отпадает надобность в золотнике реверса, имеющегося в прототипе).
На прилагаемом чертеже схематично показано устройство предлагаемого изобретения.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ (В СОСТОЯНИИ ПОКОЯ)
Предлагаемое изобретение состоит из следующих узлов и связей:
задающего устройства - электромеханического преобразователя 1, служащего для преобразования электрического входного сигнала в угловое перемещение поводка 2; основного насоса 3 реверсируемой регулируемой производительности, предназначенного для питания гидродвигателя 4; вспомогательного насоса постоянной производительности 5, предназначенного для питания системы управления люлькой основного насоса, компенсационно-поддавливающего устройства и для восполнения утечек из системы основного насоса; системы управления люлькой основного насоса - двухкаскадного гидроусилителя 6; электродвигателя 7, приводящего во вращение вал с установленными на нем основным и вспомогательным насосами; 2-х клапанов подпитки 8, установленных на магистралях основного насоса, поддерживающих во входной магистрали постоянное давление, равное давлению за вспомогательным насосом; 2-х предохранительных клапанов 9, не допускающих превышения допустимой величины давления в полостях нагнетания основного насоса; гидродвигателя 4 и связанного с ним потенциометра обратной связи 10; компенсационно-поддавливающего устройства сильфонного типа 11, обеспечивающего постоянное давление на входе во вспомогательный насос и компенсирующего увеличение объема рабочей жидкости при температурном расширении ее.
Введенная нами система управления люлькой основного насоса с жесткой обратной связью выполнена следующим образом:
поводок 2 электромеханического преобразователя 1 шарнирно связан с подвижной втулкой 12, установленной на подпружиненном золотнике 15, расположенном в другой подвижной втулке 14, жестко соединенной рычагом обратной связи 15 с люлькой 16 основного насоса, перемещаемой сервопоршнем 17.
Переменный дроссель 18 соединен с полостью "а" и с постоянным дросселем 19.
Полость нагнетания вспомогательного насоса 5 постоянно соединена с полостью "б" сервопоршня 17. Управляющая полость этого сервопоршня "в" соединена каналом "г" в зависимости от знака управляющего электрического сигнала или с полостью нагнетания вспомогательного насоса через переменный дроссель 20 и канал "д", или через переменный дроссель 21 со сливом.
Введенный реверс потока рабочей жидкости к гидродвигателю достигается за счет перехода через нулевое положение люльки основного насоса (в отличие от прототипа, где реверсирование осуществляется с помощью узла реверса при одностороннем регулировании производительностью основного насоса).
Предлагаемое изобретение работает следующим образом:
при подаче электрического сигнала на электромеханический преобразователь 1 его поводок 2 отклоняется в ту или иную сторону в зависимости от знака сигнала. В системе управления люлькой основного насоса отклонение поводка преобразуется в угловое перемещение люльки 16.
При этом рабочая жидкость из насоса 3 поступает в одну из рабочих полостей гидродвигателя 4, в то же время из противоположной полости гидродвигателя жидкость поступает во всасывающую полость основного насоса, что вызывает перемещение штока гидродвигателя.
При отсутствии управляющего электрического сигнала, т.е. при работе привода на холостом ходу, люлька 16 основного насоса устанавливается в положение нулевой производительности (в прототипе минимальный, угол наклона люльки равен 0,5°).
Введенная нами система управления люлькой основного насоса работает следующим образом: при повороте поводка электромеханического преобразователя (для определенности рассмотрим случай отклонения поводка против часовой стрелки, см. по чертежу), соединенная с ним шарнирно втулка 12 отсечной кромкой перекрывает проходное сечение переменного дросселя 18, в результате чего его сопротивление увеличивается, давление в полости "а" растет и золотник 15, преодолевая сопротивление пружины, перемещается вправо. При этом проходное сечение дросселя 20 увеличивается и рабочая жидкость из полости нагнетания вспомогательного насоса по каналам "д" и "г" поступает в полость "в" сервопоршня 17 и вызывает его перемещение и изменение угла наклона связанной с сервопоршнем люльки 16 основного насоса 3. Рычаг жесткой обратной связи 15, отслеживая изменение положения люльки, смещает подвижную втулку 14, которая, уменьшая проходное сечение дросселя 20, устанавливается в новом положении, соответствующем сигналу на электромеханическом преобразователе, и тем самым фиксирует новое положение люльки основного насоса.
При отклонении поводка электромеханического преобразователя в противоположную сторону перемещение золотника 15 влево, вследствие увеличения проходного сечения дросселя 18 и расхода через него, а также уменьшения давления в полости "а", увеличивает проходное сечение дросселя 21, соединяя полость "в" сервопоршня 17 со сливной полостью.
При этом сервопоршень 17 перемещается влево, изменяя положение люльки, а с помощью рычага жесткой обратной связи 15 и подвижной втулки 14 это новое положение люльки 16 основного насоса фиксируется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1974 |
|
SU1840519A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Электрогидравлический следящий привод с объемным управлением | 1974 |
|
SU517879A1 |
| Электрогидравлический привод | 1979 |
|
SU827860A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |
Изобретение относится к области авиационной техники. Привод содержит основной насос с блоком цилиндров и люлькой, вспомогательный насос, компенсационно-поддавливающее устройство, гидроусилитель и узел обратной связи. Гидроусилитель выполнен двухкаскадным, первый каскад которого включает втулку, подвижно установленную на золотнике, имеющем дроссели постоянного и переменного сечения, второй каскад - золотник и подпружиненную втулку, шарнирно соединенную с плечом разноплечего рычага, второе плечо которого соединено с исполнительным поршнем и люлькой основного насоса. Технический результат - улучшение характеристик. 1 ил.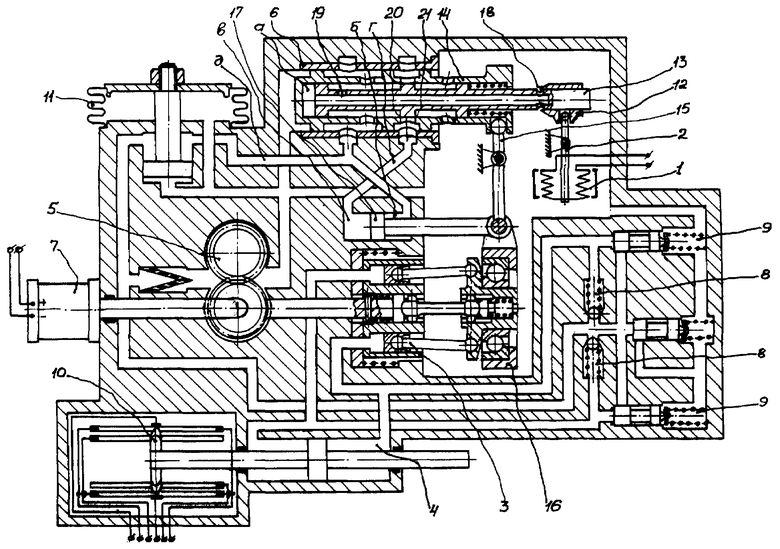
Электрогидравлический привод систем управления летательным аппаратом, содержащий основной насос с блоком цилиндров и люлькой, вспомогательный насос, компенсационно-поддавливающее устройство, гидроусилитель и узел обратной связи, отличающийся тем, что, с целью улучшения характеристики привода, в нем гидроусилитель выполнен двухкаскадным, первый каскад которого включает втулку, подвижно установленную на золотнике, имеющем дроссели постоянного и переменного сечения, а второй каскад - золотник и подпружиненную втулку, шарнирно соединенную с плечом разноплечего рычага, второе плечо которого шарнирно соединено с исполнительным поршнем и люлькой основного насоса.

