Изобретение относится к машиностроительной гидравлике и может быть использовано для управления аксиально-поршневым насосом от двух входов - электрического и механического.
Известен механизм управления аксиально-поршневым насосом, содержащий источник управляющего давления, корпус, двухкаскадный электрогидравлический усилитель с соплом-заслонкой и рычажной обратной связью люльки насоса на золотниковый второй каскад усиления, выполненной в виде закрепленного на люльке рычага с пальцем и вилкой, толкатели на концах которой взаимодействуют с пружинами обратной связи, опирающимися на торцы плунжера золотника. Для обеспечения возможности управления насосом дополнительно от механического входа в нем с помощью рычажного дифференциала с вилкой обратной связи соединен валик ручного управления.
Механизм позволяет осуществлять управление насосом как от электрического, так и от механического входов, а также одновременно от обоих входов.
Недостатком такого механизма управления является сложность и громоздкость шарнирно-рычажной системы.
Известна также конструкция механизма управления регулируемым аксиально-поршневым насосом, выбранная в качестве прототипа, содержащая источник управляющего давления, корпус, двухкаскадный электрогидравлический усилитель с соплом-заслонкой и междроссельными камерами, при помощи каналов сообщенными с полостями, для установки нагруженных пружинами и механически связанных между собой толкателей второго каскада усиления, и распределитель в виде трех плоских золотников, сопряженных между собой плоскими рабочими поверхностями, причем один из крайних золотников гидравлически соединен с цилиндрами управления, поршни которых установлены с возможностью взаимодействия с коромыслом люльки насоса, средний золотник кинематически связан с валиком механического входа усилителя, а второй крайний золотник соединен с источником управляющего давления.
Недостатком прототипа является его сложность и ограниченность компоновочных возможностей, вызванные тем, что на распределитель, выполненный в виде трех плоских золотников, управляющее воздействие и обратная связь по положению люльки насоса передается с помощью системы рычагов и гидравлических каналов.
Целью изобретения является упрощение конструкции.
Это достигается за счет того, что средний золотник снабжен цилиндрическими отверстиями для образования полостей для размещения толкателей и пружин усилителя, при этом каналы для сообщения междроссельных камер с указанными полостями выполнены во втором крайнем и в среднем золотниках распределителя соответственно в виде отверстий и сопряженных с ними серповидных окон. Второй крайний золотник выполнен в виде втулки с торцовой рабочей поверхностью, установленной в корпусе подвижно в осевом направлении с возможностью контакта с рабочей поверхностью среднего золотника.
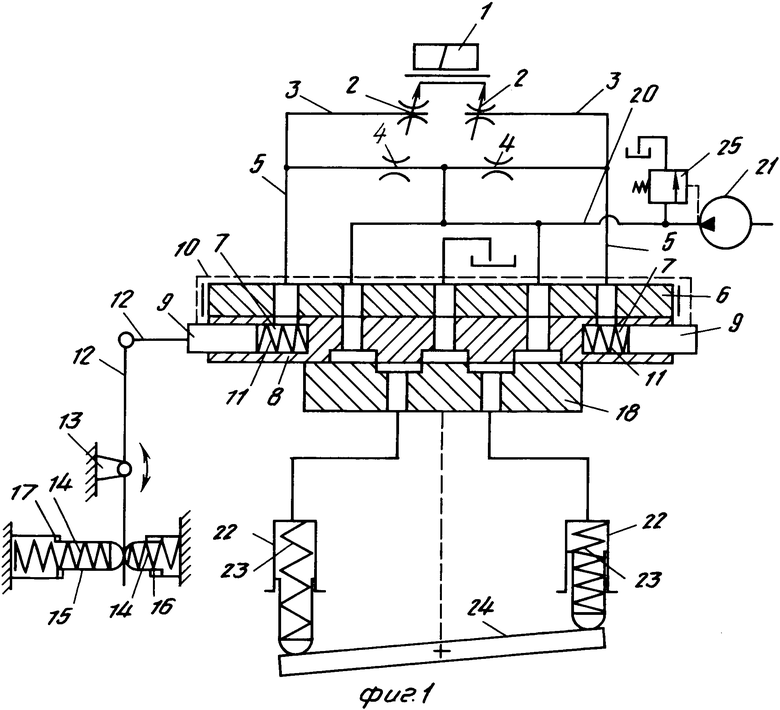
На фиг. 1 показана принципиальная гидрокинематическая схема предлагаемого механизма управления; на фиг.2 - конструктивное исполнение заявляемого решения; на фиг. 3 - конструктивное исполнение среднего золотника.
Механизм управления содержит источник управляющего давления, корпус, двухкаскадный электрогидравлический усилитель с соплом-заслонкой и междроссельными камерами, распределитель в виде трех плоских золотников.
На оси электромеханического преобразователя 1 (фиг. 1) установлена заслонка, образующая в совокупности с соплами 2 два дросселя переменного сечения. Междроссельные камеры 3, образованные между соплами 2 и дросселями 4, каналами 5 через отверстие во втором крайнем золотнике 6 подключены к цилиндрическим отверстиям 7, выполненным в среднем золотнике 8. В этих же отверстиях установлены толкатели 9, механически с помощью тяги 10 связанные друг с другом, и пружины 11.
С тягой 10 шарнирно с помощью рычага 12 соединен валик 13 ручного управления. К рычагу 12 поджаты пружинами 14 плунжеры 15 и 16 нуль-установителя 17. Второй крайний золотник 6 поджат к одному из рабочих торцов среднего золотника 8 и установлен подвижно в расточке корпуса. Другим рабочим торцом средний золотник 8 контактирует с первым крайним золотником 18. Каналом 20 вспомогательный насос 21 подключен к входам дросселей 4 и среднего золотника 8. Выходные каналы первого крайнего золотника 18 соединены с цилиндрами 22 управления, в рабочих полостях которых установлены пружины 23, опирающиеся на коромысло 24 люльки аксиально-поршневого насоса.
К каналу 20 насоса 21 подключен сливной клапан 25. В корпусе 26 (фиг. 2) выполнен цилиндрический канал 19, соединяющийся с цилиндрическим отверстием 27,в котором установлены дроссели 4. Отверстие 28 соединяет отверстие 27 с цилиндрическим отверстием 29, в котором вставлены сопла 2. Отверстия 30, выполненные в корпусе 26 и соединенные с отверстием 29, сопряжены с цилиндрическими отверстиями 31 во втором крайнем золотнике 6, установленном подвижно в осевом направлении, в расточке корпуса 26 и поджатом к одному из рабочих торцев среднего золотника 8. От поворота вокруг оси второй крайний золотник 6 удерживается штифтом 32, запрессованным в корпусе 26. Отверстия 31 во втором крайнем золотнике 6 сопряжены с серповидными окнами 33 (фиг. 3), выполненными в среднем золотнике 8.
Отверстие 34, расположенное во втором крайнем золотнике 6, сопряжено с отверстием 35, выполненным в среднем золотнике 8.
Отверстие 35 соединено через паз 36 (фиг. 3) и цилиндрическое отверстие 37 (фиг. 2) с окнами 38, которые сопряжены с окнами 39, выполненными в первом крайнем золотнике 18. Окна 39 через цилиндрические отверстия 40 связаны с рабочими полостями цилиндров 22 управления.
В среднем золотнике 8 (фиг. 3) выполнены два глухих цилиндрических отверстия 7, в которых установлены толкатели 9. Толкатели 9 соединены между собой с помощью тяги 10 и пальцев 41. В тяге 10 запрессована ось 42, с помощью которой тяга 10 шарнирно соединяется рычагом 12 с валиком 13 ручного управления. В цилиндрических отверстиях 7 установлены пружины 11, которые опираются на дно отверстия 7 и дно расточки толкателя 9. На торце среднего золотника 8 выполнены два серповидных окна 33, которые отверстиями 43 соединены с отверстиями 7. Поворот среднего золотника 8 происходит вокруг оси 44 (фиг. 2).
Механизм управления работает следующим образом.
При подаче управляющего сигнала на электромеханический преобразователь 1 заслонка, закрепленная на его оси, отклоняется на угол, пропорциональный величине сигнала. В междроссельных камерах 3 возникает перепад давлений, действующих на дно каждого из цилиндрических отверстий 7 и на торцы толкателей 9. Золотник 8, сжимая (разжимая) пружины 11, перемещается (поворачивается), а толкатели 9, опираясь через тягу 10 и рычаг 12 на нуль-установитель 17 валика 13 ручного управления, остаются в неизменном положении. Жидкость, нагнетаемая вспомогательным насосом 21, подводится к рабочей полости одного из гидроцилиндров 22 управления, рабочая полость другого гидроцилиндра сообщается со сливом. Люлька поворачивается и изменяет подачу насоса. Угол положения люльки при этом пропорционален величине управляющего сигнала.
Процесс слежения люльки за перемещением заслонки электромеханического преобразователя 1 происходит непрерывно и с очень малой ошибкой.
В случае отклонения валика 13 управления (ручное управление) и при перемещении, связанных с ним через рычаг 12 и тягу 10 толкателей 9, происходит поворот среднего золотника 8 вокруг оси, поток рабочей жидкости направляется к рабочей полости одного из цилиндров 22 управления. Рабочая полость другого соединяется со сливом.
Люлька вместе с первым крайним золотником 18 поворачивается. При этом угол положения люльки соответствует углу поворота среднего золотника 8.
Механизм управления допускает управление люлькой и подачей насоса одновременно по сигналам от электромеханического преобразователя 1 и валика 13 управления. При этом угол поворота люльки будет пропорционален алгебраической сумме сигналов от электрического и механического входов.
В нейтральное положение после снятия управляющего сигнала валик 13 управления устанавливается нуль-установителем 17, а люлька - с помощью пружин 23 цилиндров 22 управления.
Данное техническое решение позволяет упростить конструкцию механизма управления аксиально-поршневым насосом и улучшить компоновочные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 1995 |
|
RU2109167C1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| Механизм управления регулируемым аксиально-поршневым насосом | 1982 |
|
SU1070332A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 2001 |
|
RU2183765C1 |
| Механизм управления регулируемым аксиально-поршневым насосом | 1972 |
|
SU439624A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |


Сущность изобретения: канал электрического управления представляет собой двухкаскадный электрогидравлический усилитель, первым каскадом усиления которого служит гидроусилитель типа сопло-заслонка с электромеханическим преобразователем позиционного типа. Вторым каскадом усиления является распределитель, выполненный в виде трех плоских золотников. Механическим каналом управления служит гидроусилитель золотникового типа с управлением среднего золотника. Первый крайний золотник закреплен на люльке, перемещение его пропорционально алгебраической сумме управляющих сигналов на каждом из входов управления. 1 з.п.ф-лы, 3 ил.
| Механизм управления регулируемым аксиально-поршневым насосом | 1982 |
|
SU1070332A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
