Изобретение относится к радиолокации и может быть использовано в системах, где требуется получение высокой разрешающей способности по дальности.
Известно, что в РЛС с высокой разрешающей способностью используется согласованная фильтрация широкополосных сигналов [1, 2]. Существенно, что согласованная фильтрация не позволяет полностью устранить боковые лепестки, сопутствующие основному, главному лепестку сжатого сигнала [2]. Даже в наиболее оптимальном случае, когда применяется бинарный N-элементный фазомодулированный по коду Баркера сигнал, относительный уровень боковых лепестков составляет 1/N [1, 2]. Этот уровень боковых лепестков оказывается достаточно высоким и не позволяет реализовать требуемую в РЛС разрешающую способность по дальности, т.к. происходит "маскирование" слабых сигналов сильными. Для устранения этого недостатка в приемнике РЛС обычно вводится рассогласованная фильтрация в виде весовой обработки или трансверсальных фильтров [1, 2, 3].
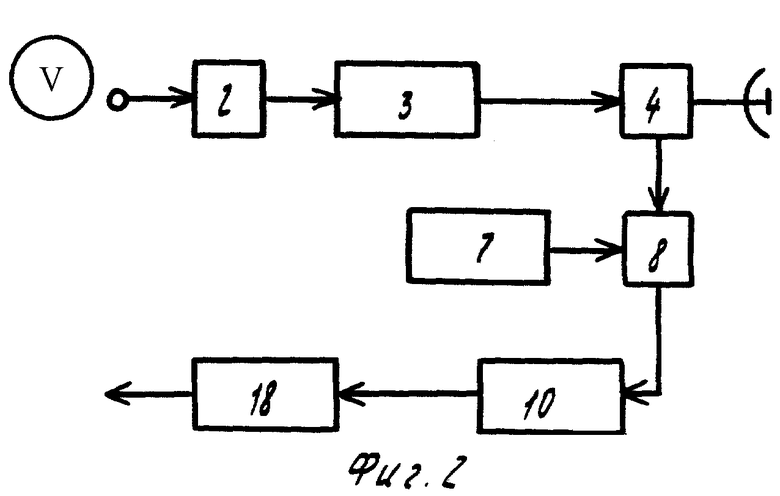
Известные РЛС со сжатием импульсов содержат передатчик с формирующим зондирующий сигнал фильтром, антенный коммутатор и антенну. В приемнике после гетеродина и смесителя включен согласованный и трансверсальный фильтры, система СДЦ и оконечные устройства обнаружения, измерения и индикации [1, 4]. Устройство (РЛС), рассмотренное в [4], выбрано в качестве прототипа.
Прототип состоит из формирователя зондирующего сигнала, соединенного с передатчиком, к которому через переключатель прием-передача подключена антенна. Ко второму выходу переключателя подключено устройство автоматической регулировки усиления, соединенное с фильтром, согласованным с зондирующим сигналом. После согласованного фильтра включена система селекции движущихся целей, к которой подключено оконечное устройство обнаружения, измерения параметров эхо-сигналов и отображения их. К формирующему фильтру подключены тактовые импульсы.
Работа устройства происходит следующим образом:
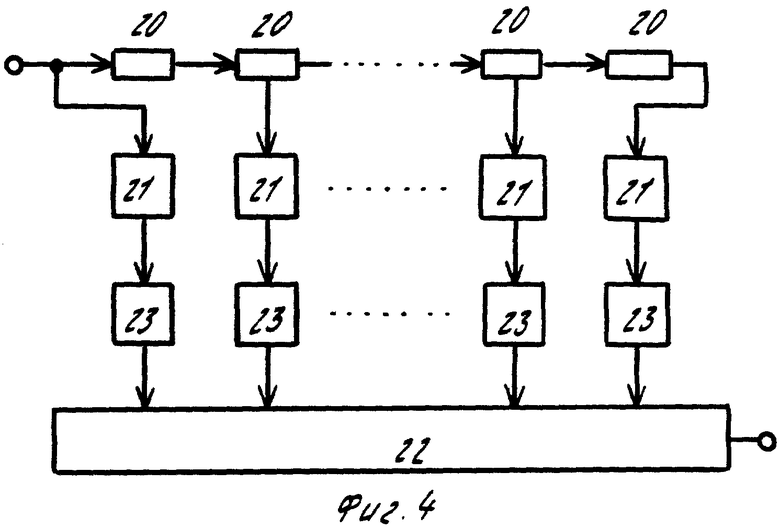
с помощью тактовых импульсов в формирующем фильтре создается импульсный сигнал, который после усиления в передатчике через антенный коммутатор подводится к антенне и излучается. После отражения от цели сигнал, принятый антенной, изменяется по интенсивности и обрабатывается согласованным фильтром, частотная характеристика которого является комплексно-сопряженной с частотной характеристикой формирующего фильтра [1, 2]. Поэтому форма сигнала после согласованного фильтра повторяет автокорреляционную функцию сформированного в передающем устройстве сигнала [2]. Для снижения относительного уровня боковых лепестков сигнала после согласованного фильтра включается трансверсальный фильтр [1, 3]. Он состоит из последовательно включенных линий задержки и многовходового сумматора, на входы которого через регуляторы амплитуды и фазы подаются сигналы после линий задержки. Параметры фильтра выбираются так, чтобы произвести оптимальную компенсацию боковых лепестков. После этого включена система селекции движущихся целей (СДЦ) и оконечные устройства обнаружения, измерения и отображения сигналов.
Известному устройству присущи недостатки. Они связаны с наличием боковых лепестков в сжатом сигнале, которые не позволяют практически реализовать высокую разрешающую способность по дальности в наиболее интересном и важном случае локации близко расположенных воздушных объектов с различными отражательными способностями (ЭПР). Применение трансверсальных фильтров позволяет производить компенсацию боковых лепестков. Однако трансверсальный фильтр является весьма сложным устройством. В [3] показано, что для приемлемой компенсации требуется линия задержки, число отводов которой в несколько раз превышает число боковых лепестков ФМ сигнала. При этом в каждом отводе включается регулятор амплитуды и фазы со строго определенными (необходимыми) параметрами, обеспечивающими требуемую компенсацию боковых лепестков. Применение фильтров с такими большими линиями задержки связано с другим недостатком, проявляющимся в условиях действия импульсных помех. Импульсы помех на выходе трансверсального фильтра появляются на каждом отводе и поражают интервал времени, больший длительности исходного зондирующего сигнала.
Целью изобретения является улучшение разрешающей способности РЛС по дальности, позволяющее обнаруживать сигналы близко расположенных объектов с различной отражательной способностью, при одновременном упрощении РЛС и без снижения защищенности ее от импульсных помех.
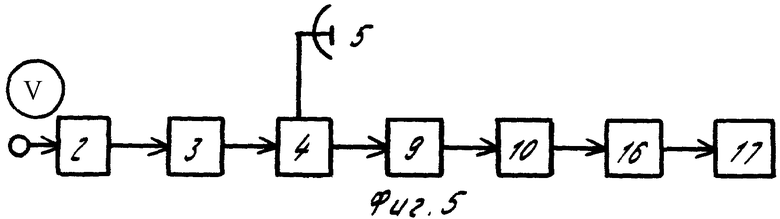
Поставленная цель достигается тем, что в известной РЛС, принятой за прототип и содержащей формирователь зондирующего сигнала, передатчик, антенный коммутатор и антенну, устройство автоматической регулировки усиления, согласованный фильтр, устройство селекции движущихся целей и устройство обнаружения, измерения параметров и отображения сигналов, согласно изобретению ко входу передатчика через коммутирующее устройство подключены выходы двух фильтров, формирующих сигналы с бинарной фазовой модуляцией и указанными выше свойствами, а входы этих формирующих фильтров через другой аналогичный коммутатор соединены с источником тактовых импульсов РЛС, который через делитель частоты на два подключен к управляющим входам обоих коммутаторов, а в приемнике РЛС после устройства автоматической регулировки усиления включен третий коммутатор, выходы которого соединены с входами двух фильтров, согласованных с сигналами передающего устройства, а выходы этих согласованных фильтров подключены к другому (четвертому) коммутатору приемника, управляющий вход которого и третьего коммутатора соединены между собой и с управляющими входами коммутаторов передающего устройства, а выход четвертого коммутатора соединен с входом линии задержки и с первым входом сумматора, второй вход которого соединен с выходом линии задержки, а выход сумматора соединен через делитель напряжения с первым входом второго сумматора и непосредственно с другой линией задержки, выход которой соединен с вторым входом этого сумматора и с входом еще одной линии задержки, выход которой через аналогичный делитель напряжения соединяется с третьим входом сумматора, выход которого через устройство СДЦ подключен к оконечному устройству РЛС.
В качестве таких сигналов могут применяться фазомодулированные по коду Баркера сигналы с числом элементов N1 и N2, связанных соотношением N2-N1=2.
Другая возможность связана с применением сигналов с бинарной фазовой модуляцией и одинаковым числом элементов и автокорреляционными функциями, у которых основные лепестки и по два любых боковых лепестка, расположенных симметрично относительно основного, соответственно, одинаковы по амплитуде и знаку, а все остальные боковые лепестки соответственно равны по амплитуде и противоположны по знаку.
Сущность заявляемого устройства связана с переходом на излучение и прием одинаковых пар фазомодулированных импульсных сигналов, с автокорреляционными функциями, все боковые лепестки которых, кроме двух, одинаковы по модулю и противоположны по знаку, а два этих и основные лепестки автокорреляционных функций одинаковы по модулю и знаку. Поэтому при предлагаемой обработке этих ФМ сигналов сначала получается сигнал, в котором содержится только два боковых лепестка. Для последующей компенсации их всегда используется фильтр, содержащий только две линии задержки, трехвходовый сумматор и делитель напряжения с действительными коэффициентами передачи.
В качестве сигналов с необходимыми и указанными выше свойствами можно применять сигналы с модуляцией фазы по коду Баркера [3] и N-элементные сигналы с бинарной модуляцией фазы [5].
Как показал анализ известных технических решений со сходными признаками [1, 2, 3, 4], существенными признаками заявленного технического решения, отличающими его от прототипа, является формирование, излучение и прием сигналов с указанными выше характеристиками их автокорреляционных функций и полное подавление практически всех боковых лепестков, что в конечном счете и обеспечивает новые свойства заявленного технического решения.
Формирование, излучение и прием ФМ сигналов в РЛС применяется [1, 2, 4]. Однако в них используются одиночные или последовательности одинаковых ФМ сигналов, что и связано с указанными выше недостатками РЛС. В заявленном устройстве получение полезного эффекта связано с формированием последовательности из определенных и различных ФМ сигналов. Для этого, в отличие от [1, 2, 4], должны использоваться ФМ сигналы с различными кодами Баркера, например, с 2 и 4 элементами, с 3 и 5 и другими или разные шестиэлементные сигналы с бинарной ФМ. Применение таких групп импульсов с различными законами ФМ позволяет достичь поставленной цели и обуславливает первую особенность предложенного технического решения, отличающую его от известных решений.
Трансверсальный фильтр для подавления боковых лепестков сигнала применяется в известных устройствах [1, 3]. Однако, как показано в [3], для качественной компенсации необходим сложный многозвенный трансверсальный фильтр, структура которого зависит от применяемого ФМ сигнала. Время задержки сигнала в таком фильтре в несколько раз превышает длительность зондирующего ФМ сигнала, а количество последовательно соединенных линий задержки и регуляторов амплитуды и фазы во много раз больше числа боковых лепестков ФМ сигнала.
В заявляемом устройстве применяется простейший двухзвенный трансверсальный фильтр с действительными коэффициентами передачи. При этом существенно, что такая конструкция фильтра, в отличие от известных решений [1, 3], должна применяться при любых ФМ сигналах, независимо от количества элементов в них.
Следовательно, в отличие от известного технического решения, где весьма сложная структура трансверсального фильтра однозначно определена законом ФМ зондирующего сигнала и поэтому при смене сигнала необходима замена трансверсального фильтра, в предложенном решении, независимо от вида ФМ зондирующего сигнала, достаточно использовать простейший двухзвенный трансверсальный фильтр. Применение такого простейшего фильтра обеспечивает улучшение разрешающей способности РЛС по дальности. При этом не происходит множественного "поражения" элементов дальности импульсной помехой. Таким образом, наряду с упрощением устройства и повышением разрешающей способности защищенность его от импульсных помех не снижается.
В заявляемой РЛС поставленная цель достигнута лишь на основе совокупности всех признаков, присущих заявленному устройству и отсутствующих, как показал анализ, у известных устройств. Поэтому заявленное устройство соответствует критерию "существенные отличия".
Изложенная сущность поясняется графическими материалами. На фиг.1-5 изображены соответственно структурные схемы заявляемого и известных устройств. На чертежах и в тексте использованы следующие обозначения:
1- коммутатор сигналов; 2, 2.1 - фильтры, формирующие ФМ сигналы; 3 - передатчик; 4 - антенный коммутатор; 5 - антенна; 6 - делитель частоты на два; 7 - гетеродин; 8 - смеситель; 9 - устройство автоматической регулировки усиления; 10, 10.1 - фильтры, согласованные с ФМ сигналами передатчика; 11 - линия задержки; 12 - двухвходовый сумматор; 13 - линия задержки; 14 - делитель напряжения; 15 - трехвходовый сумматор; 16 - система селекции движущихся целей; 17 - устройство обнаружения, измерения параметров и отображения сигналов; 18 - трансверсальный фильтр; 19 - фильтр для одиночного элемента ФМ сигнала длительностью То; 20 - линия задержки; 21 - фазовращатель; 22 - сумматор; 23 - регулятор фазы сигнала; v - тактовый импульс РЛС; N - число элементов ФМ сигнала.
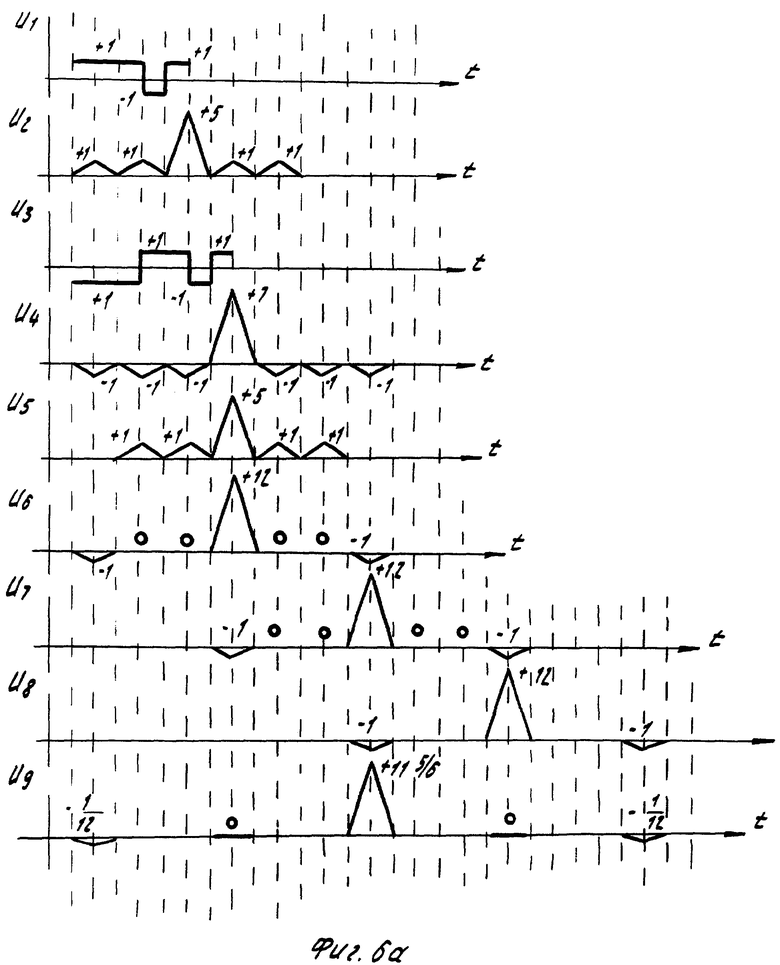
На фиг.6, 7 изображены эпюры сигналов, поясняющие работу предложенной РЛС. На этих фигурах и в тексте использованы следующие обозначения: u1, u3 - коды ФМ сигналов;
u2, u4 - ФМ сигналы после сжатия;
u4, u5 - совмещенные во времени сигналы смежных периодов повторения;
u6, u7, u8 - сигналы на входе делителей напряжений 14;
u9 - сигнал на выходе сумматора 15;
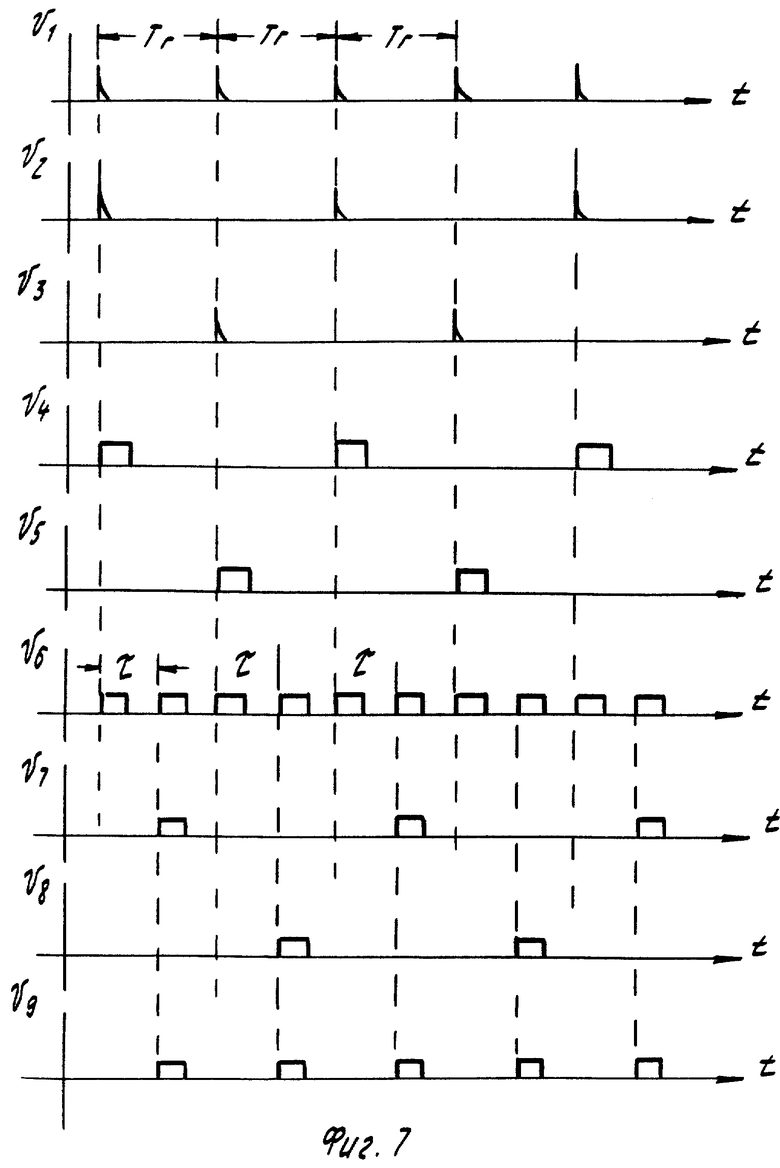
v1 - тактовые импульсы РЛС;
Тr - период следования тактовых импульсов;
v2, v3 - тактовые импульсы на входе формирующих фильтров 2 и 2.1;
v4, v5 - зондирующие ФМ импульсы после фильтров 2 и 2.1;
v6 - зондирующие импульсы и эхо-сигналы РЛС;
τ - задержка эхо-сигнала;
v7, v8 - эхо-сигналы на входах согласованных фильтров 10 и 10.1;
v9 - эхо-сигнал после объединения;
t - время.
Устройство работает следующим образом:
тактовые импульсы РЛС v воздействуют на делитель частоты на два 6, который соединен с коммутаторами 1. Поэтому тактовые импульсы v через коммутатор 1 поочередно подаются на фильтры формирования ФМ сигналов 2 и 2.1 (фиг.7, v2 и v3). В фильтрах 2 и 2.1 формируются сигналы (фиг.7, v4, v5) с различными законами фазовой модуляции. Далее с помощью второго коммутатора 1, работающего синхронно с первым, сформированные сигналы с разными законами ФМ вновь объединяются (фиг.7, v6) и с помощью передатчика 3, антенного переключателя 4 и антенны 5 усиливаются и излучаются в окружающее РЛС пространство. Принятые антенной 5 эхосигналы, задержанные на τ (фиг.7, v6), через антенный коммутатор 4 и преобразователь частоты, содержащий гетеродин 7 и смеситель 8, поступают на устройство автоматической регулировки усиления. С помощью коммутаторов 1, работающих синхронно в передающем и приемном устройствах, эхо-сигналы поочередно подключаются к согласованным с ними фильтрам 10 и 10.1. В результате при формировании в передающем устройстве ФМ сигнала с помощью фильтра 2 в приемном устройстве включен фильтр 10, а при использовании фильтра 2.1 - фильтр 10.1. Такая смена фильтров происходит непрерывно от одного периода повторения к другому. В результате эхо-сигналы, независимо от закона ФМ, сжимаются и далее вновь объединяются с помощью коммутатора 1. После коммутатора эхо-сигналы поступают на линию задержки 11 и на сумматор 12. На сумматор 12 подаются и незадержанные эхо-сигналы. С помощью линии задержки 11 производится совмещение во времени эхо-сигналов, форма которых из-за использования зондирующих сигналов с разными законами фазовой модуляции различна (фиг.6). Поэтому при суммировании эхо-сигналов в сумматоре 12 происходит полная компенсация всех боковых лепестков сжатого сигнала кроме двух (фиг.6, u6).
Далее производится компенсация оставшихся двух одинаковых боковых лепестков сжатого эхо-сигнала. Для этого после сумматора 12 включены последовательно две линии задержки, с помощью которых совмещаются во времени основной и боковые лепестки эхо-сигналов (фиг.6а, u6÷u8). Совмещение производится как для опережающего основной лепесток боковика (u6-u7), так и для отстающего (u7-u8). Перед суммированием в сумматоре 15 незадержанный (u6) и дважды задержанный сигнал уменьшаются с помощью делителей напряжения 14. При этом происходит полная компенсация боковых лепестков до и после основного. В результате этого на выходе сумматора относительный уровень боковых лепестков оказывается ничтожно малым (1/142 для 5 и 7 элементного кода Баркера). После сумматора 15 сигналы поступают на систему селекции движущихся целей 16 и затем на устройство обнаружения, измерения параметров и отображения.
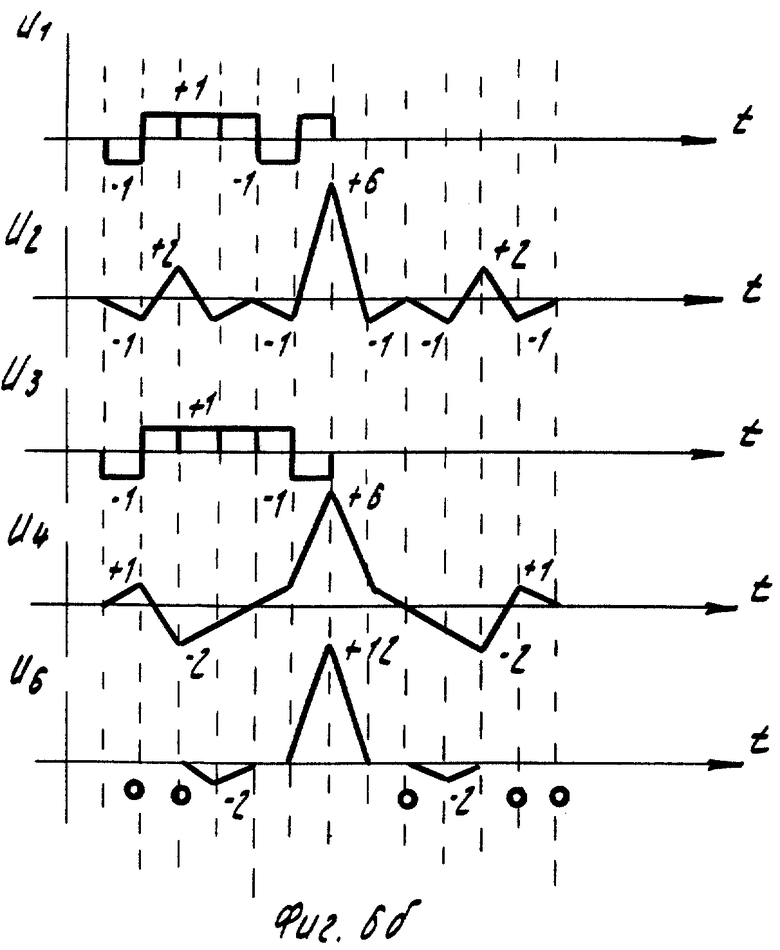
Как указывалось ранее, в качестве зондирующих сигналов в предлагаемой РЛС используются импульсы с двумя различными законами фазовой модуляции. Необходимые для использования законы ФМ существуют в классе сигналов с бинарной фазовой модуляцией [3, 5]. Например, среди сигналов с модуляцией фазы по коду Баркера можно использовать сигналы с числом элементов 2 и 4, 3 и 5, 5 и 7, 11 и 13. Кроме этого можно использовать три пары сигналов с числом элементов N = 6 и сигналы с большим числом элементов и др. На фиг.6а, б в качестве примера представлены эпюры сигналов для случая N = 5 и 7 и N = 6 и 6.
Видно, что особенность используемых сигналов заключается в том, что после сжатия в согласованных фильтрах все (кроме двух) боковые лепестки противофазны, а основные лепестки - синфазны. Для ФМ по коду Баркера противофазны все боковые лепестки, кроме крайних, для сигнала с N2 = 7. Поэтому при совмещении эхо-сигналов и суммировании остаются нескомпенсированными только два этих боковых лепестка. Величина их составляет 1/12 от основного лепестка, а временное положение определено длительностью зондирующего ФМ сигнала с N2 = 7 элементами. Используя две линии задержки по N2 - 1 (6) элементов и делитель напряжения с коэффициентом передачи 1/12, можно скомпенсировать эти боковые лепестки (фиг.6а, u9). При этом "следы" боковых лепестков величины 1/12. Однако по сравнению с основным лепестком, равным 12 единиц, это составляет достаточно малую величину 1/144. Для шестиэлементного сигнала ситуация аналогичная. Особенность заключается в том, что на втором этапе необходимо компенсировать третий от начала и конца сигнала боковые лепестки.
Реализация предложенной РЛС возможна на основе существующей техники. В качестве передающих устройств можно использовать СВЧ-усилители на вакуумных приборах с сеточным управлением (триоды, тетроды) и специальные СВЧ-приборы: клистроны, лампы бегущей и обратной волны и др. [11]. Антенны могут быть выполненными в виде зеркальных антенн, в которых формирование диаграмм производится на основе оптических методов или фазированных антенных решеток, когда необходимое поле в апертуре антенны получается путем управления токами (напряжениями) в отдельных элементах ее [12]. Антенный коммутатор для обеспечения режимов излучения и приема в одной антенне реализуется на основе трансформации сопротивления с помощью электрически управляемых разрядников [12]. В качестве приемника можно использовать, например, классическое устройство супергетеродинного типа, содержащее гетеродин, смеситель, тракт промежуточной частоты и устройство автоматической регулировки усиления [11]. Система селекции движущихся целей выполняется на основе устройств череспериодной компенсации с одно-, двух- или многократной задержкой эхо-сигналов [1, 6]. Обнаружение сигналов осуществляется с помощью пороговых устройств. Для измерения параметров сигналов используют более сложные многоканальные устройства, в которых определяется наивероятнейшее значение измеряемого параметра, а принятие результата измерения производится совместно с данными устройства обнаружения [6, 7, 8]. Отображение полученной информации производится с использованием индикаторов на электронно-лучевых трубках. При этом используются специальные развертки луча, позволяющие представлять параметры эхо-сигналов в наглядной форме [11].
Делитель частоты и коммутатор можно выполнить на основе цифровой техники с использованием современной элементной базы [9,10]. Делители напряжений (аттенюаторы) выполняются с помощью пассивных резистивных устройств или операционных усилителей с обратными связями [10]. Линии задержки выполняются на основе акустоэлектронных устройств поверхностного или объемного типов. Суммирование сигналов можно выполнять с помощью пассивных схем суммирования или с помощью сочетания их с операционными усилителями [10].
Тип используемых в предложенной РЛС ФМ сигналов определен. Для формирования и оптимального приема (сжатия) их применяются фильтры, содержащие линии задержки, фазовращатели и сумматоры напряжений. Вопросы реализации таких устройств изложены, например, в [1, 2, 3].
Таким образом, в предложенной РЛС реализуется возможность существенного снижения уровня боковых лепестков сжатого сигнала. В результате оказывается возможным прием (обнаружение-измерение) сигналов от близко расположенных объектов с различными отражательными способностями.
Действительно, при использовании баркеровских сигналов с N1 и N2>N1 элементами после совмещения во времени и суммирования сжатых сигналов получаем сигнал с двумя боковыми лепестками. Расположены они на периферии зондирующего импульса с N=N2. Относительная величина боковых лепестков по отношению к основному составляет 1/N1+N2 (фиг.6а, u6). Для компенсации их необходимы две одинаковые линии задержки с Тлз = (N2 - 1)To, два делителя с коэффициентами передачи K = 1/N1+N2 и трехвходовый сумматор (фиг.6а, u6, u7, u8).
В результате эти боковые лепестки компенсируются полностью, а на большем удалении от основного лепестка появляются "следы" боковых лепестков, уровень которых 1/N1+N2. Следовательно, относительный уровень боковых лепестков в рассматриваемом случае составляет:
Полученная оценка показывает, что в предложенном устройстве возможно значительное снижение уровня боковых лепестков. Например, даже при использовании баркеровских сигналов с небольшим числом элементов N1=5 и N2=7 можно снизить уровень боковых лепестков до δБ(5,7)≈1/144<0,01. В случае баркеровских сигналов с большим числом элементов N1=11 и N2=13 относительный уровень боковых лепестков снижается до величины δБ(11,13)≈0,002.
Аналогичные результаты получаются и для бинарных ФМ сигналов с одинаковым числом элементов в группе (паре).
Полученная оценка δБ характеризует максимальный уровень нескомпенсированных боковых лепестков, тогда как при обычном применении баркеровских сигналов величина 1/N определяет средний уровень их. Поэтому полученные в предложенном устройстве результаты следует считать весьма высокими. Так, например, при использовании баркеровских сигналов с количеством элементов N1 и N2 "маскировка" сигнала ВО с малой ЭПР сигналом ВО с большой ЭПР будет происходить, если отношение их ЭПР составляет:

При N1=5 и N2=7 получаем:  Если N1=11 и N2=13, то
Если N1=11 и N2=13, то  Такое отношение ЭПР ВО является приемлемым даже с учетом перспектив снижения ЭПР по программе "Stealth" [13].
Такое отношение ЭПР ВО является приемлемым даже с учетом перспектив снижения ЭПР по программе "Stealth" [13].
Существенно, что в отличие от известных устройств эти результаты в предложенном устройстве получены при упрощении его.
Действительно, в [3] показано, что для получения примерно такого же результата по уровню боковых лепестков (δ≈0,02, в предложенном устройстве δБ<0,01) для 5-элементного баркеровского сигнала необходимо применять 19-элементный трансверсальный фильтр. В таком фильтре 18 линий задержки и 19 делителей напряжения, с помощью которых необходимо обеспечить коэффициенты передачи: -0,803; +1,325; -0,602; ...+4,616; -4,920; ...+20,878; ...+0,803. Ясно, что получение таких коэффициентов и поддержание их постоянными при эксплуатации РЛС является сложной технической задачей.
В предложенном устройстве даже для более сложного сигнала (N1=11, N2=13) и меньшего уровня остатков боковых лепестков (δБ≈0,002) для компенсации используется простейший двухзвенный фильтр с коэффициентами передачи делителей, равными 0,042; 1; 0,042.
Кроме этого в известном устройстве применение трансверсальных фильтров, полная задержка сигналов в которых Тз в несколько раз больше длительности зондирующего сигнала NTo[3], приводит к снижению защищенности РЛС от импульсных помех. Это связано с тем, что в таком фильтре одиночная импульсная помеха по линиям задержки через сумматор проникает на все Тз/То элементов дистанции и поражает их. Для лучшей компенсации боковых лепестков необходимо увеличить Тз и поэтому требования по снижению уровня боковых лепестков и защищенности от импульсных помех противоречивы.
В предложенном устройстве независимо от вида используемых ФМ сигналов применен двухзвенный фильтр. Поэтому можно считать, что степень поражения элементов дистанции импульсной помехой уменьшается пропорционально числу используемых в фильтре каналов, т.е. для 5-элементного сигнала в  раз.
раз.
Таким образом, в предложенном устройстве реализована возможность приема и обработки сигналов, отраженных от близко расположенных воздушных объектов с сильно отличающимися (104-105) величинами ЭПР. При этом предложенное устройство проще известного, а защищенность его от импульсных помех выше.
Источники информации
1. Справочник по радиолокации, п/ред. М. Сколника. Москва: Сов. радио, 1979 г., т.3 стр. 400-440.
2. Я.Д. Ширман. Разрешение и сжатие сигналов. Москва: Сов.радио, 1974, стр. 126-127, 107, 136-162.
3. И.Н. Амиантов. Избранные вопросы статистической теории связи. Москва: Сов. радио, 1971 г., стр. 375-406.
4. Motkin D.L. Three-dimensional air surveillances radar. System Technoloqy, 1975, № 21, p.p.29-33.
5. Л.Е. Варакин. Системы связи с шумоподобными сигналами. Москва: Радио и связь, 1985 г., стр. 95-106.
6. Справочник по радиолокации, п/ред. М. Сколника. Москва: Сов. радио, 1979 г., т.2, гл.1-3, т.3, гл.1-2, т.4, гл.2.
7. Современная радиолокация, пер. с англ. п/ред. Ю.Б. Кобзарева. Москва: Сов. радио, 1969 г., стр. 482-489, 511-525.
8. Теоретические основы радиолокации, п/ред. В.Е. Дулевича. Москва: Сов. радио, 1978 г., стр. 215-287.
9. А.Г. Алексеенко, И.И. Шагурин. Микросхемотехника. Москва: Радио и связь, 1982 г., стр. 200-220.
10. Дж. Ленк. Электронные схемы. Москва: Мир, 1985 г., стр. 154-158, 172-193.
11. Справочник по радиолокации, п/ред. М. Сколника. Москва: Сов. радио, 1979 г., т.3, стр. 8-58, 135-162, 197-218.
12. Справочник по радиолокации, п/ред. М. Сколника. Москва: Сов. радио, 1979 г., т.2, гл. 1, 2, 3, 4.
13. В.А. Ионов. О программе создания невидимых самолетов. Вестник ПВО №3, 1983 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| РАДИОЛОКАТОР С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1990 |
|
RU2035052C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |
| УСТРОЙСТВО ПЕРВИЧНОЙ ОБРАБОТКИ СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЙ ДВЕ ПОСЛЕДОВАТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2005 |
|
RU2305853C2 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
| ПОМЕХОЗАЩИЩЕННЫЙ МАЛОВЫСОТНЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ЦЕЛИ | 1992 |
|
RU2038611C1 |

Изобретение относится к радиолокации и может быть использовано в системах, где требуется получение высокой разрешающей способности по дальности. Технический результат - повышение разрешающей способности радиолокатора. Достигается тем, что в радиолокатор введены первый коммутатор, последовательно соединенные делитель частоты на два, второй коммутатор и второй формирователь фазомодулированного сигнала, гетеродин, соединенный со входом смесителя, последовательно соединенные третий коммутатор, второй согласованный фильтр, четвертый коммутатор, вторая и третья линии задержки, два делителя напряжения, второй сумматор, причем второй вход второго коммутатора и вход делителя частоты «на два» объединены и подключены к тактирующему входу радиолокатора, второй выход второго коммутатора через первый формирователь фазомодулированного сигнала подключен ко входу первого коммутатора, второй и третий входы которого соединены соответственно с выходами делителя частоты на два и второго формирователя фазомодулированного сигнала, а выход первого коммутатора соединен со входом передатчика, выход антенного переключателя через второй вход смесителя подключен ко входу блока автоматической регулировки усиления, выход которого соединен со входом третьего коммутатора, второй выход которого через первый согласованный фильтр подключен ко входу четвертого коммутатора, при этом выход делителя частоты на два соединен также со вторыми входами третьего и четвертого коммутаторов, выход последнего соединен со вторым входом первого сумматора, выход которого, а также выход третьей линии задержки, соответственно, через первый и второй делители подключены ко входам второго сумматора, к третьему входу которого подключен выход второй линии задержки, а выход второго сумматора соединен со входом блока селекции движущихся целей. 7 ил.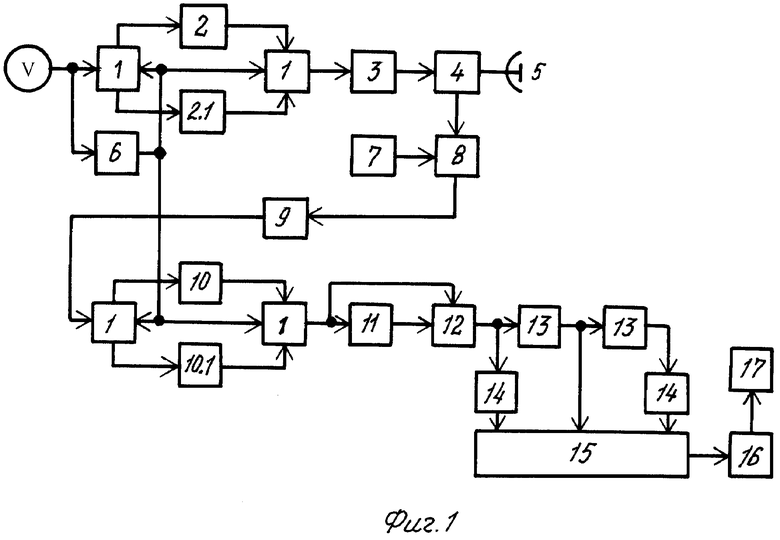
Радиолокатор со сжатием сигналов, содержащий передатчик, подключенный через антенный переключатель к антенне, блок автоматической регулировки усиления, первый формирователь фазомодулированного сигнала, первый согласованный фильтр, блок селекции движущихся целей, выход которого подключен ко входу блока индикации, отличающийся тем, что, с целью повышения разрешающей способности радиолокатора, введены первый коммутатор, последовательно соединенные делитель частоты на два, второй коммутатор и второй формирователь фазомодулированного сигнала, гетеродин, соединенный со входом смесителя, последовательно соединенные третий коммутатор, второй согласованный фильтр, четвертый коммутатор, первая линия задержки, первый сумматор, вторая и третья линии задержки, два делителя напряжения, второй сумматор, причем второй вход второго коммутатора и вход делителя частоты на два объединены и подключены к тактирующему входу радиолокатора, второй выход второго коммутатора через первый формирователь фазомодулированного сигнала подключен ко входу первого коммутатора, второй и третий входы которого соединены соответственно с выходами делителя частоты на два и второго формирователя фазомодулированного сигнала, а выход первого коммутатора соединен со входом передатчика, выход антенного переключателя через второй вход смесителя подключен ко входу блока автоматической регулировки усиления, выход которого соединен со входом третьего коммутатора, второй выход которого через первый согласованный фильтр подключен ко входу четвертого коммутатора, при этом выход делителя частоты на два соединен также со вторыми входами третьего и четвертого коммутаторов, выход последнего соединен со вторым входом первого сумматора, выход которого, а также выход третьей линии задержки, соответственно, через первый и второй делители подключены ко входам второго сумматора, к третьему входу которого подключен выход второй линии задержки, а выход второго сумматора соединен со входом блока селекции движущихся целей.
| Motkin D.L | |||
| "Three-dimensional air surveillances radar" System Technology, 1975, №21, pp.29-33. |

