Изобретение относится к области радиолокационной техники и может быть использовано в радиолокационных станциях (РЛС) автономных и командных систем управления, предназначенных для обнаружения сигналов от целей, измерения их координат и автоматического сопровождения по дальности и по угловым координатам при наличии естественных и организованных радиопомех.
В настоящее время применение сложных сигналов, то есть сигналов с внутриимпульсной модуляцией, является важным фактором, определяющим повышение основных качественных показателей РЛС, прежде всего дальности обнаружения, разрешающей способности и помехозащищенности по отношению к естественным и организованным радиопомехам. Наиболее перспективными, в особенности для РЛС автономных и телеуправляемых систем управления, представляются сигналы с внутриимпульсной фазовой манипуляцией (ФМ) двоичным многоразрядным кодом, допускающие органичное использование цифровых методов формирования и обработки сигналов.
Известна РЛС [1] которая содержит приемопередатчик, способный излучать и принимать сигналы с внутриимпульсной фазовой манипуляцией или частотной модуляцией, блок ограничения сигналов, устройство сжатия импульсов и пороговый блок. В указанной РЛС отраженные от цели сигналы после приема ограничиваются по амплитуде, сжимаются по времени в согласованном фильтре, построенном на основе линии задержки с отводами, а затем обнаруживаются в пороговом блоке. Недостатком этой РЛС является работа на одной частоте и, как следствие, недостаточная помехозащищенность по отношению к прицельным шумовым помехам.
Известна РЛС [2] которая наиболее близка по технической сущности к предлагаемому устройству и принята в качестве прототипа. Устройство-прототип допускает перестройку несущей частоты от импульса к импульсу по произвольному закону и использует сигналы с внутриимпульсной фазовой манипуляцией двоичным многоразрядным кодом. РЛС построена по когерентному принципу и содержит последовательно соединенные синхронизатор, передатчик, антенный переключатель и антенну, подключенный к третьему плечу антенного переключателя приемник и устройство обработки информации, причем передатчик выполнен на основе последовательно соединенных возбудителя, фазового манипулятора и усилителя мощности, управляемых блоком перестройки частоты, генератором кодов и импульсным модулятором соответственно, а приемник содержит усилитель высокой частоты, декодирующее устройство, первый смеситель и второй смеситель (фазовый детектор), причем блок перестройки частоты подключен к управляющему входу возбудителя, генератор кодов соединен с управляющими входами фазового манипулятора и декодирующего устройства, выход гетеродинной частоты возбудителя соединен с гетеродинным входом смесителя, а выход опорной частоты возбудителя с входом опорной частоты фазового детектора.
Благодаря применению сложных ФМ-сигналов с перестройкой несущей частоты от импульса к импульсу эта РЛС обладает более высокой помехозащищенностью по отношению к ответным и прицельным по частоте помехам, чем РЛС, использующая простые импульсные сигналы с той же энергией, без перестройки несущей частоты от импульса к импульсу.
Недостаток РЛС-прототипа состоит в малой точности измерения координат при недостаточно высокой скрытности и помехозащищенности, что является следствием включения устройства сжатия ФМ-сигналов ("декодирующего устройства", как оно названо в описании) непосредственно за усилителем высокой частоты приемника, это означает, что сжатие ФМ-сигналов в прототипе выполняется на частоте принимаемых сигналов, что ограничивает возможности его реализации сравнительно малыми длительностями сложных сигналов (до 10-20 мкс). Это, в свою очередь, приводит к малой точности измерения координат и недостаточно высокой скрытности и помехозащищенности РЛС по отношению к ответным помехам. В особенности этот недостаток проявляется в РЛС, предназначенных не только для обнаружения сигналов от целей и измерения их координат в режиме обзора, но и для автоматического сопровождения целей по дальности и по угловым координатам на основе моноимпульсной пеленгации. Невысокая стабильность параметров устройств сжатия сложных сигналов (см. например, [10, с. 175]), работающих на сверхвысоких несущих частотах отраженных сигналов, ограничивает возможность их реализации в моноимпульсных приемниках, в которых требуется высокая идентичность фазочастотных характеристик суммарного и разностного приемных каналов, сравнительно малыми длительностями сложных сигналов (до 10 мкс).
Кроме того, помехозащищенность и скрытность РЛС-прототипа в режиме сопровождения становятся недостаточными также и по другой причине вследствие увеличения мощности зондирующего излучения на входе разведприемников, входящих в комплексы радиоэлектронного противодействия (РЭП) (например, типа AN SLQ-32, см. [11]), по мере приближения РЛС к цели, причем увеличение мощности нарастает обратно пропорционально квадрату дальности между РЛС и прикрываемой РЭП целью (например, надводным кораблем). Потеря же скрытности приводит к повышению возможности создания ответных помех в режиме сопровождения.
Далее указанные особенности построения РЛС-прототипа не позволяют регулировать длительность и ширину спектра зондирующих сигналов по мере уменьшения дальности до цели, а в условиях, когда дальность до цепи R оказывается меньше величины  , соответствующей длительности Tи зондирующих сигналов (C скорость света), и длительность принимаемых сигналов
, соответствующей длительности Tи зондирующих сигналов (C скорость света), и длительность принимаемых сигналов  становится соответственно меньше длительности зондирующих (из-за бланкирования приемника), устройство сжатия оказывается несогласованным с принимаемыми сигналами, что также ведет к потерям в точности измерения координат и помехозащищенности.
становится соответственно меньше длительности зондирующих (из-за бланкирования приемника), устройство сжатия оказывается несогласованным с принимаемыми сигналами, что также ведет к потерям в точности измерения координат и помехозащищенности.
Технической задачей изобретения является повышение помехозащищенности РЛС как в режиме обнаружения, так и, в особенности, в режиме сопровождения при одновременном повышении точности сопровождения.
Для достижения заявленного технического результата в предлагаемой РЛС сжатие сложных ФМ-сигналов производится не на несущей частоте принимаемых сигналов, а на видеочастоте в цифровых согласованных фильтрах (ЦСФ) после гетеродинного преобразования, усиления по промежуточной частоте, фазового детектирования и усиления сигналов по видеочастоте в двух квадратурных каналах как в суммарном, так и в разностном приемном канале при моноимпульсном способе пеленгации в режиме сопровождения. При этом видеосигналы на входе ЦСФ подвергаются бинарному квантованию по амплитуде с нулевым пороговым уровнем и квантованию по времени, сигналы рассогласования по углу образуются путем скалярного произведения троично квантованных сжатых сигналов с выходов ЦСФ суммарного и разностного каналов, для стабилизации крутизны пеленгационной характеристики производится регулирование мощности зондирующих импульсов в зависимости от измеряемого отношения сигнал/шум по сигналам от сопровождаемой цели, для устранения ошибки измерения дальности до сопровождаемой цели вследствие квантования по времени сигналов на входе ЦСФ вводится изменение моментов квантования по времени с изменением дальности до цели. Кроме того, по мере уменьшения длительности принимаемых сигналов с уменьшением дальности до сопровождаемой цели для повышения точности измерения координат и помехозащищенности производится изменение полосы пропускания ЦСФ с одновременной регулировкой порога первичного обнаружения на выходе ЦСФ, а также скачкообразное уменьшение длительности зондирующих сигналов путем перехода на сигналы с более высокой разрешающей способностью по дальности при сохранении кода ФМ с одновременной перестройкой ЦСФ в суммарном и разностном приемных каналах и расширением полосы пропускания обоих приемных каналов.
Сущность изобретения заключается в том, что в радиолокационную станцию, содержащую последовательно соединенные синхронизатор, блок перестройки частоты, возбудитель, фазовый манипулятор и усилитель мощности, последовательно соединенные антенный переключатель и антенну, последовательно соединенные приемник и первый блок квадратурных фазовых детекторов, а также генератор кодов, импульсный модулятор и устройство обработки информации, причем первый вход приемника подключен к третьему плечу антенного переключателя, выходы генератора кодов и импульсного модулятора соединены с управляющими входами фазового манипулятора и усилителя мощности соответственно, выход гетеродинной частоты возбудителя соединен с гетеродинным входом приемника, выход опорной частоты возбудителя со входом опорной частоты блока квадратурных фазовых детекторов, введены блок формирования порогов, последовательно соединенные по двум входам-выходам квадратурных составляющих суммарного сигнала первый видеоусилитель, сигнальные входы которого подключены к выходам первого блока квадратурных фазовых детекторов, первый амплитудный квантователь, первый цифровой согласованный фильтр и блок объединения квадратур, выходы которого с первого по третий подключены соответственно к первому, второму и третьему входам устройства обработки информации, последовательно соединенные по двум входам-выходам квадратурных составляющих разностного сигнала второй блок квадратурных фазовых детекторов, сигнальный вход которого подключен ко второму выходу приемника, состоящего из двух идентичных каналов суммарного и разностного, а вход опорной частоты к соответствующему выходу возбудителя, второй видеоусилитель, второй амплитудный квантователь, второй цифровой согласованный фильтр и угловой дискриминатор, третий и четвертый входы которого подключены соответственно к первому и второму выходам первого согласованного фильтра, последовательно соединенные первый коммутатор, информационный вход которого подключен к выходу углового дискриминатора, и интегратор последовательно соединенные второй коммутатор, информационный вход которого подключен к третьему выходу блока объединения квадратур, блок измерения интенсивности, дешифратор градаций мощности, преобразователь код-напряжение и регулятор мощности, второй вход которого подключен к выходу усилителя мощности, а выход ко второму плечу антенного переключателя, антенна содержит антенный блок, соединенный с суммарно-разностным преобразователем, и связанный с ним кинематически привод антенны, первый вход которого подключен к выходу интегратора, а второй вход - к выходу сигнала азимута цели устройства обработки информации, выход разностного сигнала антенны подключен ко второму входу приемника, управляющие входы коммутаторов объединены и подключены к выходу строба дальности устройства обработки информации, третий выход которого соединен с управляющими входами видеоусилителей и входом синхронизатора, а четвертый выход с управляющим входом блока перестройки частоты, второй выход синхронизатора подключен ко входу импульсного модулятора и к первому входу генератора кодов, второй тактовый вход которого подключен к третьему выходу синхронизатора, а выход соединен с управляющими входам цифровых согласованных фильтров, входы сигнала обнуления которых, четвертый вход устройства обработки информации, а также входы сигналов обнуления блоков измерения интенсивностей и формирования порога подключены к четвертому выходу синхронизатора, третий выход которого соединен также с пятым входом устройства обработки информации, шестой вход которого соединен с информационным выходом привода антенны, а седьмой вход подключен к выходу блока формирования порогов, тактовый вход которого объединен с тактовыми входами цифровых согласованных фильтров и подключен к пятому выходу устройства обработки информации.
Устройство обработки информации (УОИ) содержит последовательно соединенные блок сравнения с порогом, блок первичной обработки и блок вторичной обработки, последовательно соединенные по двум входам-выходам ключ и буферное запоминающее устройство, а также дальномер, причем первый вход дальномера подключен к выходу блока сравнения с порогом, а его первый выход, третий и четвертый входы соединены соответственно со вторым входом, первым и вторым выходами блока вторичной обработки, третий вход которого подключен к выходу буферного запоминающего устройства, управляющий вход которого соединен с управляющим входом ключа, выходом строба дальности дальномера и является выходом строба дальности устройства обработки информации, выходы блока вторичной обработки с третьего по пятый являются вторым, третьим и четвертым выходами устройства обработки информации соответственно, а третий выход дальномера, объединенный с третьим входом блока первичной обработки, является пятым тактовым выходом устройства обработки информации, первый и второй входы которого соединены с информационными входами ключа, третий вход подключен к первому входу блока сравнения с порогом, четвертый вход ко входам сигнала начала дальности блока первичной обработки и дальномера, второй тактовый вход которого подключен к пятому входу устройства обработки информации, шестой и седьмой входы которого образованы соответственно вторыми входами блока первичной обработки и блока сравнения с порогом.
Цифровой согласованный фильтр (ЦСФ) состоит из двух идентичных фильтров, каждый из которых содержит сдвиговый регистр, оперативное запоминающее устройство (ОЗУ), многовходовый сумматор и двухвходовый сумматор, причем сигнальные входы сдвиговых регистров соединены соответственно с первым и вторым сигнальными входами ЦСФ, выходы сдвиговых регистров поразрядно соединены через оперативные запоминающие устройства кодов со входами соответствующих многовходовых сумматоров, выходы которых подключены к первым входам двухвходовых сумматоров, выходы которых являются выходами ЦСФ, а вторые входы соединены вместе и подключены к числовой шине, на которую подается число N/2, где N разрядность кода фазовой манипуляции, управляющие входы ОЗУ кодов соединены вместе и подключены к третьему входу ЦСФ, входы обнуляющего сигнала и тактирующих импульсов сдвиговых регистров также попарно соединены между собой и подключены к соответствующим 4-му и 5-му входам ЦСФ.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг. 1 структурная схема РЛС;
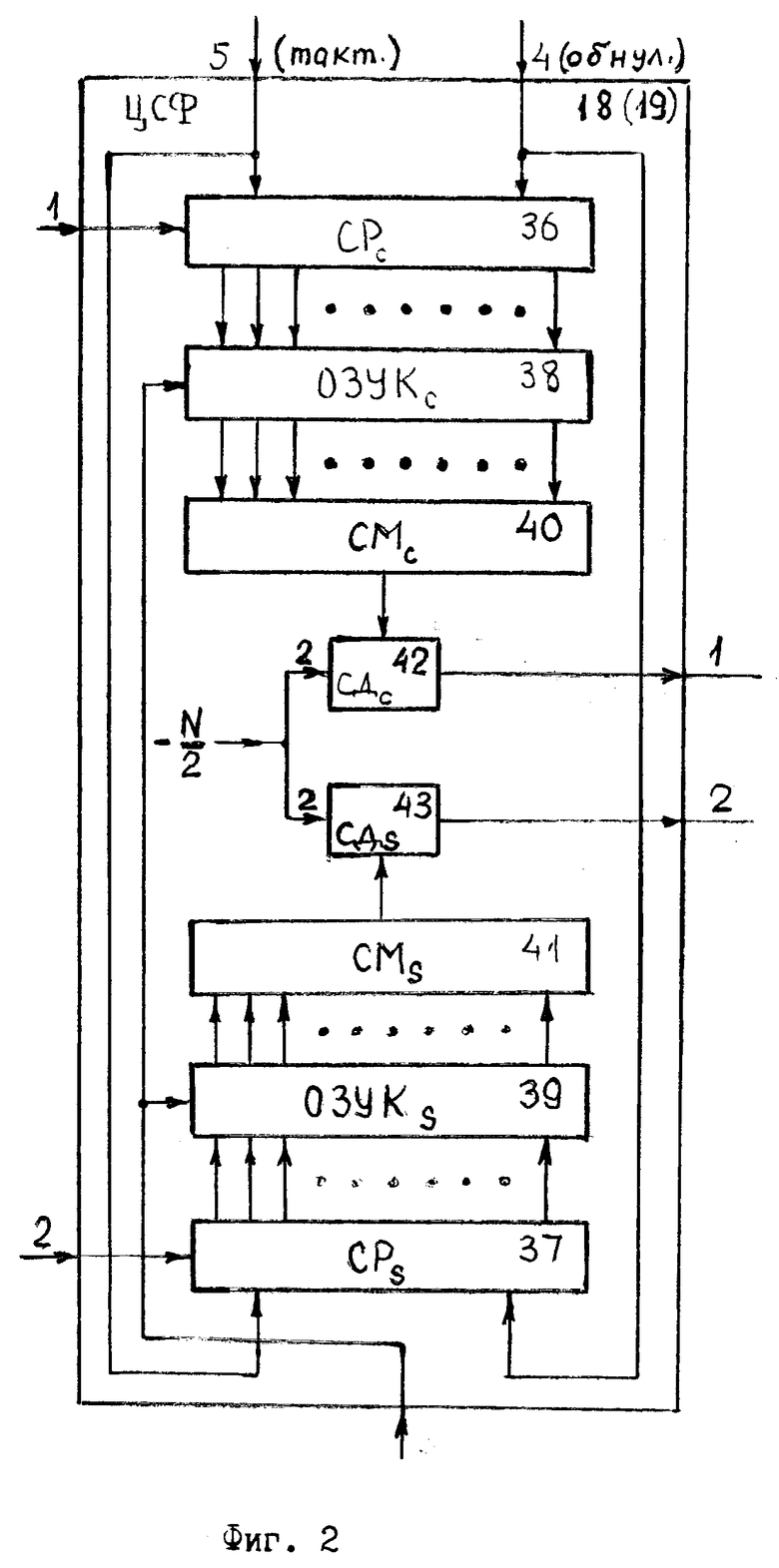
фиг. 2 структурная схема ЦСФ;
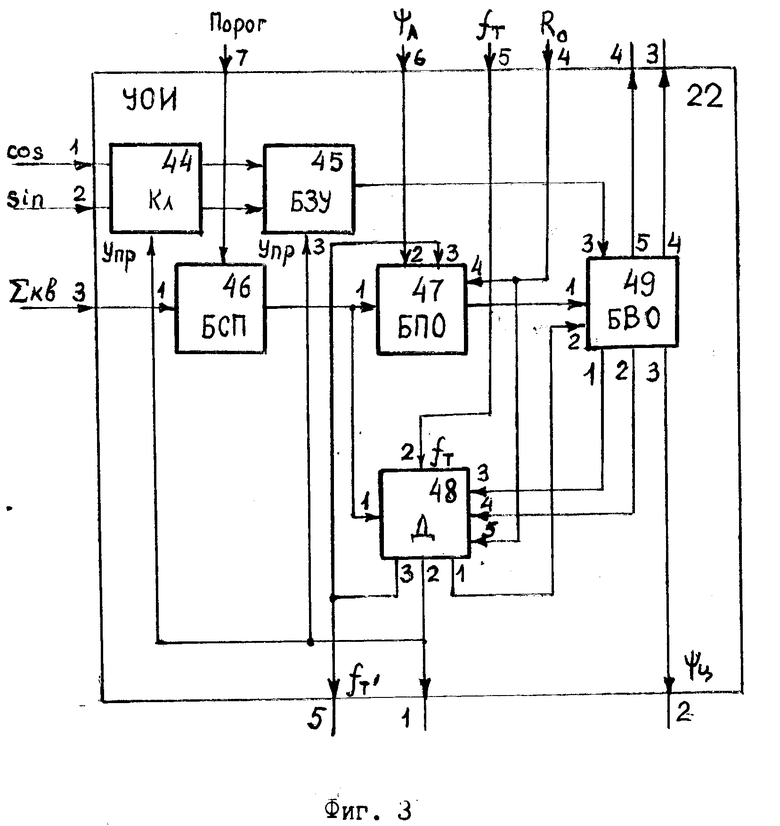
фиг. 3 структурная схема УОИ;
фиг. 4 структурная схема блока объединения квадратур;
фиг. 5 структурная схема блока формирования порогов;
фиг. 6 структурная схема блока измерения интенсивности;
фиг. 7 структурная схема дальномера;
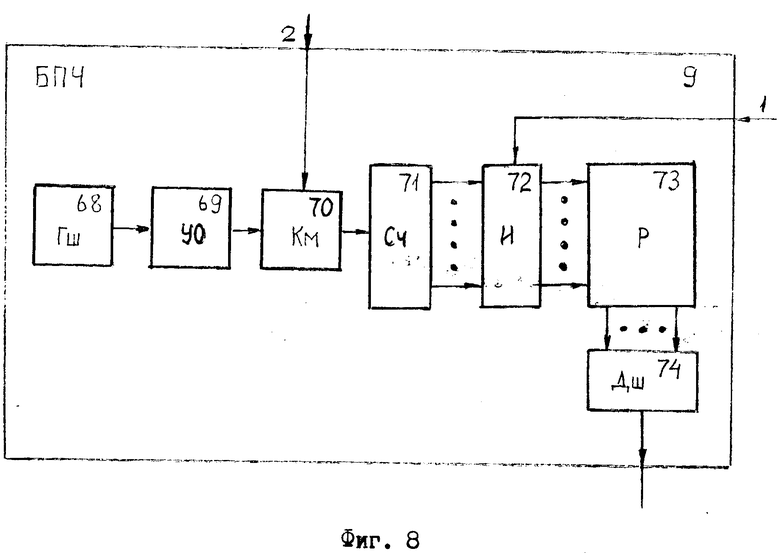
фиг. 8 структурная схема блока перестройки частоты;
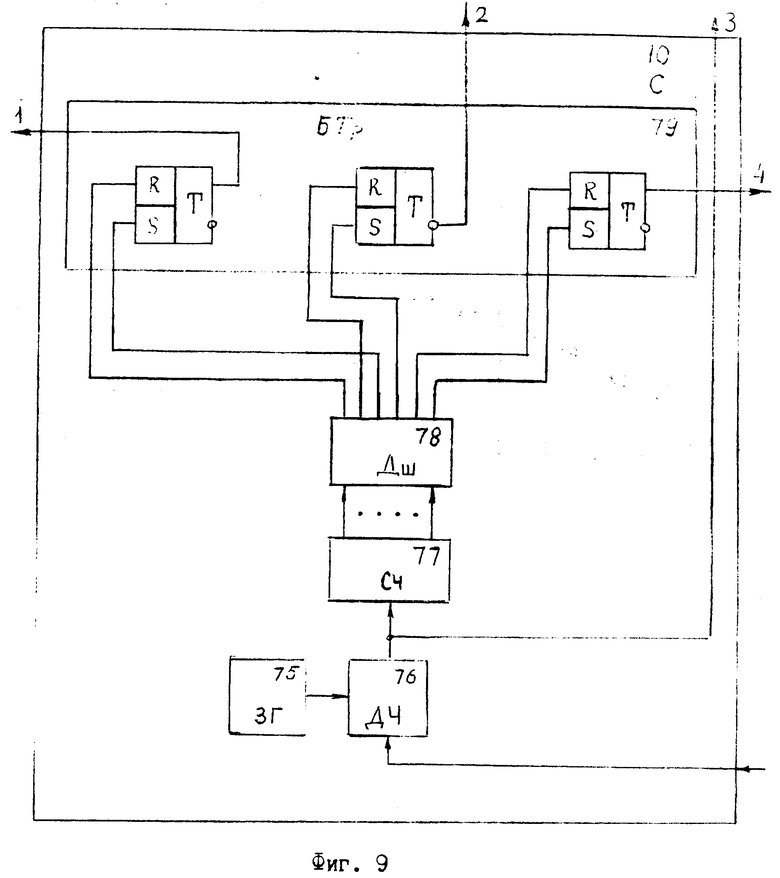
фиг. 9 структурная схема синхронизатора;
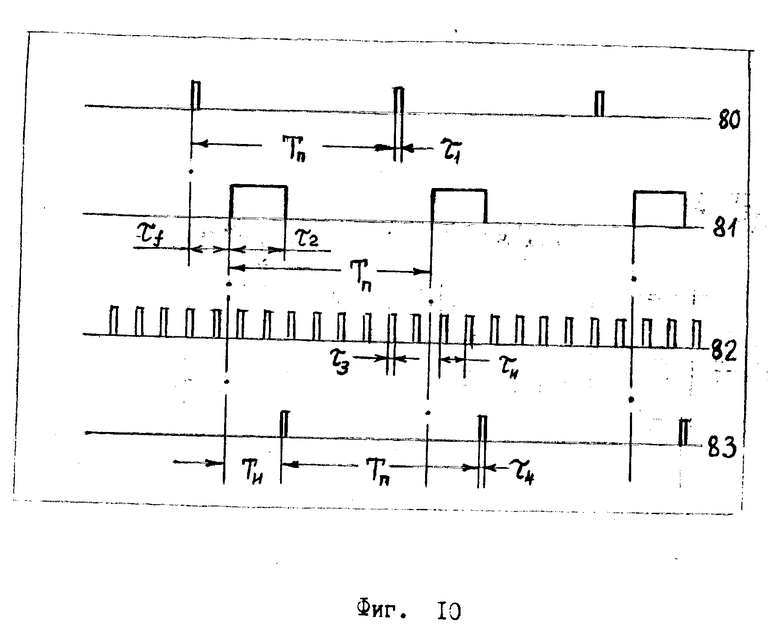
фиг. 10 временные диаграммы напряжений на выходах синхронизатора;
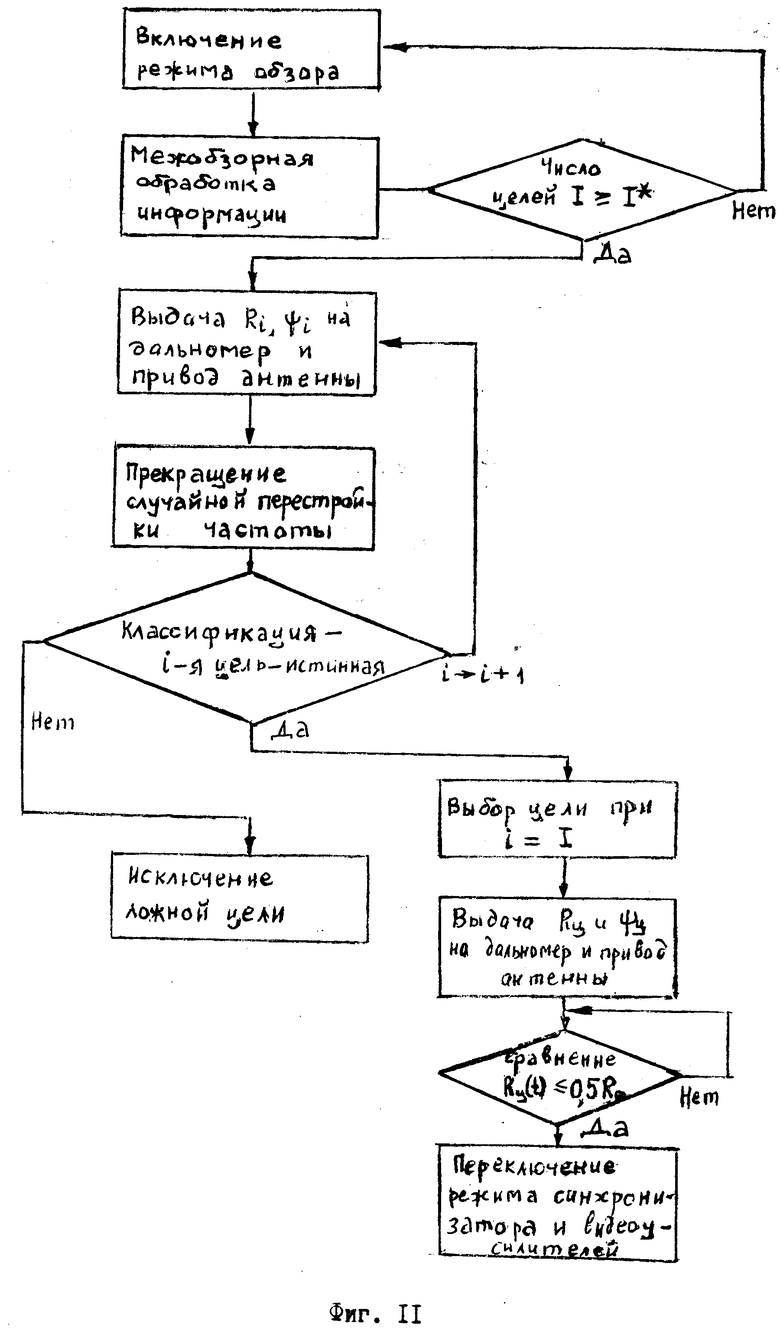
фиг. 11 блок-схема алгоритма работы блока вторичной обработки;
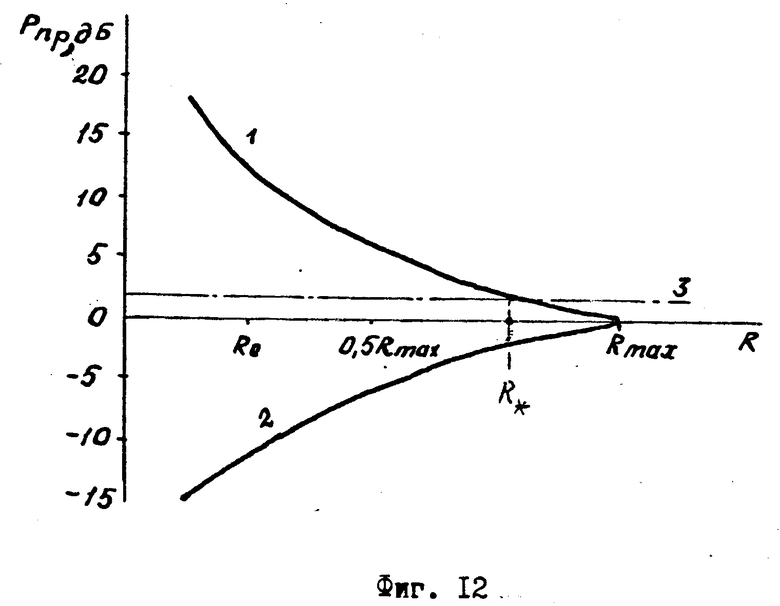
фиг. 12 зависимость мощности зондирующих импульсов РЛС на входе разведприемника от расстояния между ними;
фиг. 13 зависимость крутизны пеленгационной характеристики углового дискриминатора от отношения сигнал/шум;
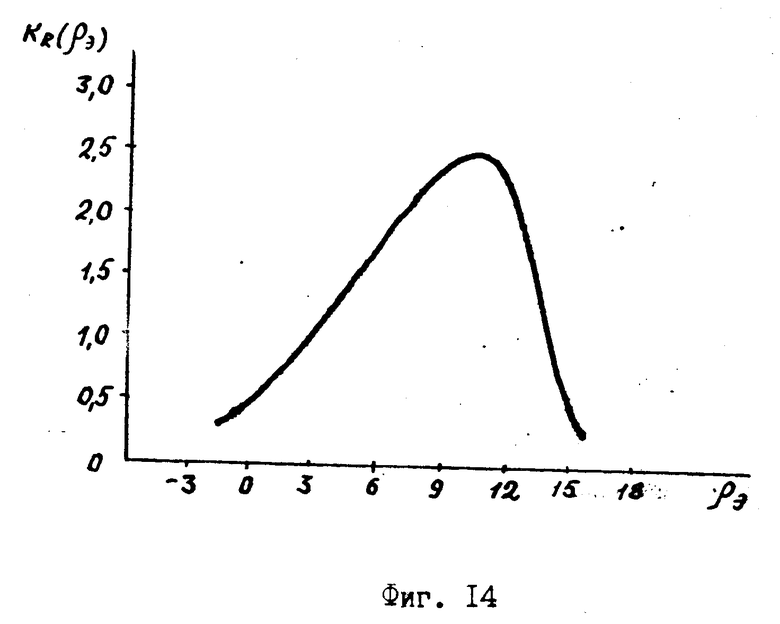
фиг. 14 зависимость крутизны характеристики дискриминатора дальности от отношения сигнал/шум;
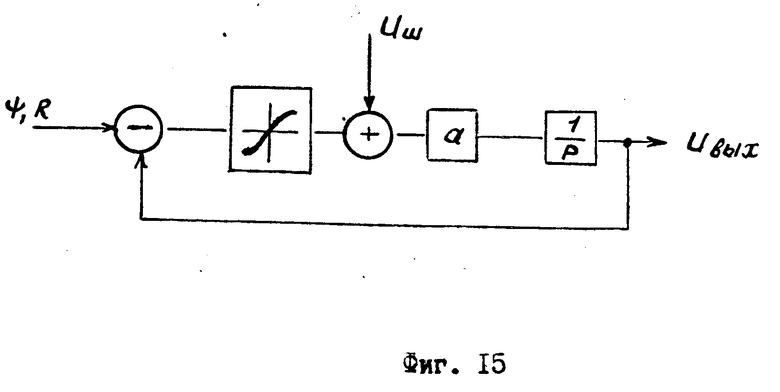
Фиг. 15 эквивалентная схема контура сопровождения.
На фиг. 1 приняты следующие обозначения:
1 антенна (А);
2 антенный переключатель (АП);
3 регулятор мощности (РМ);
4 усилитель мощности (УМ);
5 фазовый манипулятор (ФМ);
6 возбудитель (В);
7 импульсный модулятор (ИМ);
8 генератор кода (ГК);
9 блок перестройки частоты (БПЧ);
10 синхронизатор (С);
11 двухканальный суммарно-разностный приемник (Пр);
12, 13 первый и второй блоки квадратурных фазовых детекторов (ФД1), (ФД2) соответственно;
14, 15 первый и второй видеоусилители (ВУ1), (ВУ2) соответственно;
16, 17 первый и второй амплитудные квантователи (АК1), (АК2) соответственно;
18, 19 первый и второй цифровые согласованные фильтры (ЦСФ1), (ЦСФ2) соответственно;
20 блок объединения квадратур (БОК);
21 дискриминатор угла (ДУ);
22 устройство обработки информации (УОИ);
23 блок формирования порогов (БФП);
24, 25 первый и второй коммутаторы (К1), (К2) соответственно;
26 интегратор;
27 блок измерения интенсивности (БИИ);
28 дешифратор градаций мощности (ДГМ);
29 преобразователь код-напряжение (ПКН);
30 антенный блок (АБ);
31 суммарно-разностный преобразователь (СРП);
32 привод антенны (ПА);
33 усилитель высокой частоты (УВЧ);
34 смеситель (СМ);
35 усилитель промежуточной частоты (УПЧ).
На схеме по фиг. 1 последовательно соединены синхронизатор 10, блок 9 перестройки частоты, возбудитель 6, фазовый манипулятор 5 и усилитель 4 мощности, антенна 1 и антенный переключатель 2, причем второй выход антенны 1 соединен со входом разностного сигнала приемника 11, вход суммарного сигнала которого подключен к третьему плечу антенного переключателя 2, а гетеродинный вход к гетеродинному выходу возбудителя 6, последовательно соединены по двум входам-выходам квадратурных каналов первые двухканальные блок 12 квадратурных фазовых детекторов, видеоусилитель 14, амплитудный квантователь 16, цифровой согласованный фильтр 18, а также блок 20 объединения квадратур, последовательно соединены по двум входам-выходам квадратурных каналов вторые двухканальные блок 13 квадратурных фазовых детекторов, видеоусилитель 15, амплитудный квантователь 17, цифровой согласованный фильтр 19, а также угловой дискриминатор 21, причем третий и четвертый входы углового дискриминатора 21 подключены соответственно к первому и второму выходам первого цифрового согласованного фильтра 18, первые входы первого и второго блоков 12, 13 квадратурных фазовых детекторов соединены соответственно с выходами суммарного и разностного каналов приемника 11, входы опорной частоты блоков 12, 13 квадратурных фазовых детекторов объединены и подключены к выходу опорной частоты возбудителя 6, а выходы блока 20 объединения квадратур с первого по третий соединены с соответствующими входами устройства 22 обработки информации.
Выход углового дискриминатора 21 через последовательно соединенные первый коммутатор 24 и интегратор 26 соединен с первым входом привода 32 антенны 1, а третий выход блока 20 объединения квадратур через последовательно соединенные второй коммутатор 25, блок 27 измерения интенсивности, дешифратор 28 градаций мощности, преобразователь 29 код-напряжение и регулятор 3 мощности соединены со вторым плечом антенного переключателя 2, причем второй вход регулятора 3 мощности подключен к выходу усилителя 4 мощности, управляющий вход которого через импульсный модулятор 7 подключен ко второму выходу синхронизатора 10, который соединен также с первым входом генератора 8 кодов, выход которого соединен с управляющим входом фазового манипулятора 5, и с третьими (управляющими) входами первого и второго цифровых согласованных фильтров 18, 19.
Четвертые входы (обнуления) цифровых согласованных фильтров 18, 19 объединены между собой, соединены со вторым входом блока 27 измерения интенсивности, вторым входом блока 23 формирования порогов, четвертым входом устройства 22 обработки информации и подключены к четвертому выходу синхронизатора 10. Первый выход (строба дальности) устройства 22 обработки информации соединен с объединенными между собой управляющими входами первого и второго коммутаторов 24, 25, второй выход (сигнала азимута цели) устройства 22 обработки информации соединен со вторым входом привода 32 антенны 1, третий выход устройства 22 обработки информации соединен со входом синхронизатора 1 и с объединенными между собой управляющими входами первого и второго видеоусилителей 14, 15, четвертый выход устройства 22 обработки информации соединен со вторым (управляющим) входом блока 9 перестройки частоты, а пятый выход (тактирующих импульсов) устройства 22 обработки информации соединен с первым входом блока 23 формирования порогов и с объединенными между собой пятыми входами (тактирующих импульсов) цифровых согласованных фильтров 18, 19.
Пятый вход устройства 22 обработки информации соединен с третьим выходом (тактирующих импульсов) синхронизатора 10, к которому подключен и второй (тактовый) вход генератора 8 кодов, шестой вход устройства 22 обработки информации подключен к информационному выходу привода 32 антенны 1, а седьмой его вход соединен с выходом блока 23 формирования порогов.
Антенна 1 содержит антенный блок 30, состоящий из зеркала с 4-рупорным облучателем, соединенный волноводами с суммарно-разностным преобразователем 31, первый и второй выходы антенны 1 образованы одноименными выходами суммарно-разностного преобразователя 31. К управляющему входу антенного блока 30 подключен кинематический выход привода 32 антенны, информационный выход которого является третьим выходом антенны 1, а первый и второй входы привода 32 антенны 1 являются соответственно одноименными входами антенны 1.
Приемник 11 содержит последовательно соединенные по двум входам-выходам
суммарного и разностного каналов двухканальные усилитель высокой частоты 33, балансный смеситель 34, гетеродинный вход которого является третьим - гетеродинным входом приемника, первый и второй входы усилителя высокой частоты 33 являются входами, а первый и второй выходы усилителя промежуточной частоты 35 выходами суммарного и разностного каналов приемника 11 соответственно.
На схеме по фиг. 2 цифрового согласованного фильтра 18 (19) приняты следующие обозначения:
36 сдвиговый регистр косинусной квадратуры (СРc);
37 сдвиговый регистр синусной квадратуры (СРs);
38 оперативное запоминающее устройство кодов косинусной квадратуры (ОЗУКc);
39 оперативное запоминающее устройство кодов синусной квадратуры (ОЗУКs);
40 многовходовый сумматор косинусной квадратуры (СМc);
41 многовходовый сумматор синусной квадратуры (СМs);
42 двухвходовый сумматор косинусной квадратуры (СМc);
43 двухвходовый сумматор синусной квадратуры (СМs).
На схеме цифрового согласованного фильтра 18 (19) (фиг. 2) сигнальные входы сдвиговых регистров 36 и 37 квадратурных каналов соединены соответственно с первым и вторым сигнальными входами ЦСФ, выходы СРc 36, СРs 37 поразрядно соединены через оперативные запоминающие устройства 38, 39 кодов со входами соответствующих многовходовых сумматоров 40, 41, выходы которых подключены к первым входам соответствующих двухвходовых сумматоров 42, 43, выходы которых являются выходами ЦСФ 18 (19), а вторые входы объединены между собой и подключены к числовой шине N/2, управляющие входы ОЗУКc 38, ОЗУКs 39 объединены и подключены к третьему входу ЦСФ 18 (19), входы обнуляющего сигнала и тактирующих импульсов СРc 36 и СРs 37 также попарно соединены между собой и подключены соответственно к 4-му и 5-му входам ЦСФ 18 (19).
На схеме устройства обработки информации 22 (фиг. 3) приняты следующие обозначения:
44 двухканальная ключевая схема (Кл);
45 буферное запоминающее устройство (БЗУ);
46 блок сравнения с порогом (БСП);
47 блок первичной обработки (БПО);
48 дальномер (Д);
49 блок вторичной обработки (БВО).
На схеме устройства 22 обработки информации по фиг. 3 последовательно соединены блок 46 сравнения с порогом, блок 47 первичной обработки и блок 49 вторичной обработки, причем выход 46 соединен через дальномер 48 также и со вторым входом БВО 49, первый и второй выходы которого соединены соответственно с третьим и четвертым входами Д 48, второй выход которого соединен с первым выходом УОИ 22 и с третьими управляющими входами последовательно соединенных по двум шинам Кл 44 и БЗУ 45, выход которого подключен к третьему входу БВО 49, а первый и второй входы Кл 44 являются одноименными входами УОИ 22, третий вход которого соединен с сигнальным входом БСП 46, четвертый вход УОИ 22 соединен с одноименным входом БПО 47 и пятым входом Д 48, пятый, шестой и седьмой входы УОИ 22 соединены со вторыми входами соответственно Д 48, БПО 47 и БСП 46. Третий, четвертый и пятый выходы БВО 49 соединены соответственно со вторым, третьим и четвертым выходами УОИ 22, а третий выход Д 48 соединен с одноименным входом БПО 47 и с пятым выходом УОИ 22.
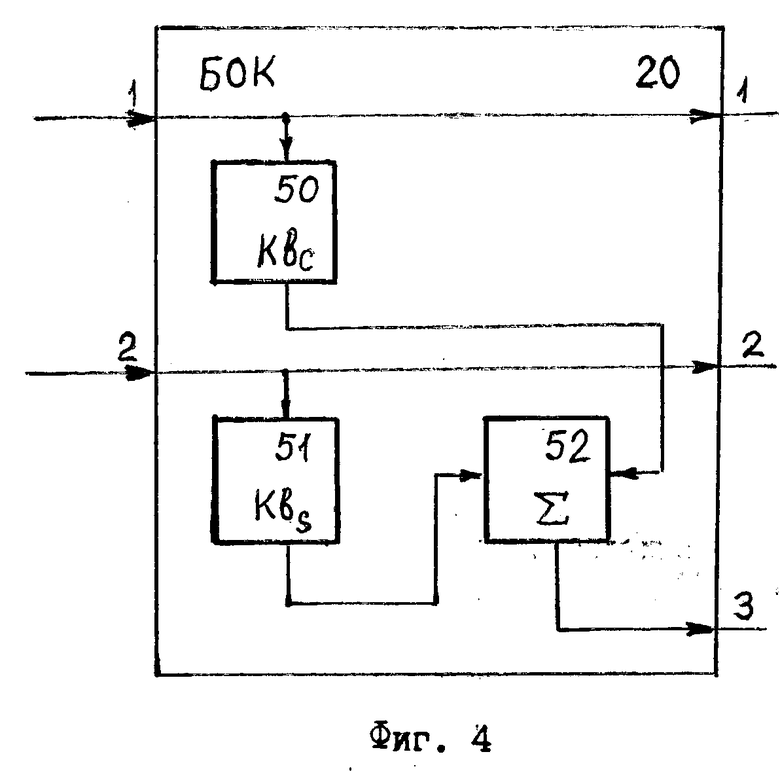
На схеме по фиг. 4 блока 20 объединения квадратур приняты следующие обозначения:
50 квадратор косинусной квадратуры (Квc);
51 квадратор синусной квадратуры (Квs);
52 сумматор квадратур ((Σ)).
На фиг. 4 БОК 20 первый и второй входы БОК соединены соответственно с одноименными выходами БОК 20 и входами Квc 50 и Квs 51, выходы которых соединены со входами двухвходового сумматора ((Σ)) 52, выход последнего соединен с третьим выходом БОК 20.
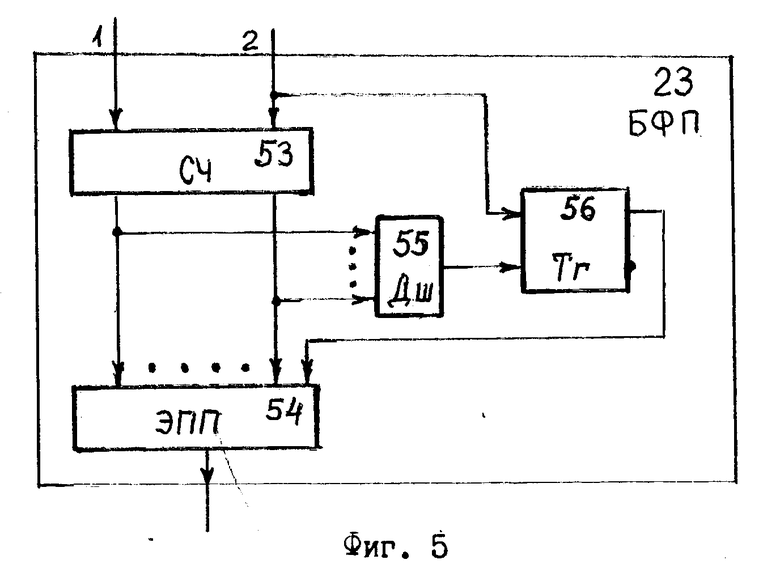
На схеме по фиг. 5 блока 23 формирования порогов (БФП) приняты следующие обозначения:
53 счетчик (Сч);
54 элемент постоянной памяти (ЭПП);
55 дешифратор (Дш);
56 триггер (Тг).
В схеме блока 23 формирования порогов БФП на фиг. 5 счетный вход счетчика (Сч) 53 подключен к первому входу блока, вход установки в ноль Сч 53 ко второму входу блока и первому входу триггера (Тг) 56. Выходы счетчика 53 соединены поразрядно со входами дешифратора (Дш) 55 и входами младших разрядов адреса элемента 54 постоянной памяти (ЭПП), выход Дш 55 соединен со вторым входом Тг 56, выход последнего соединен со входом старшего разряда ЭПП 54, выход которого является выходом БФП 20.
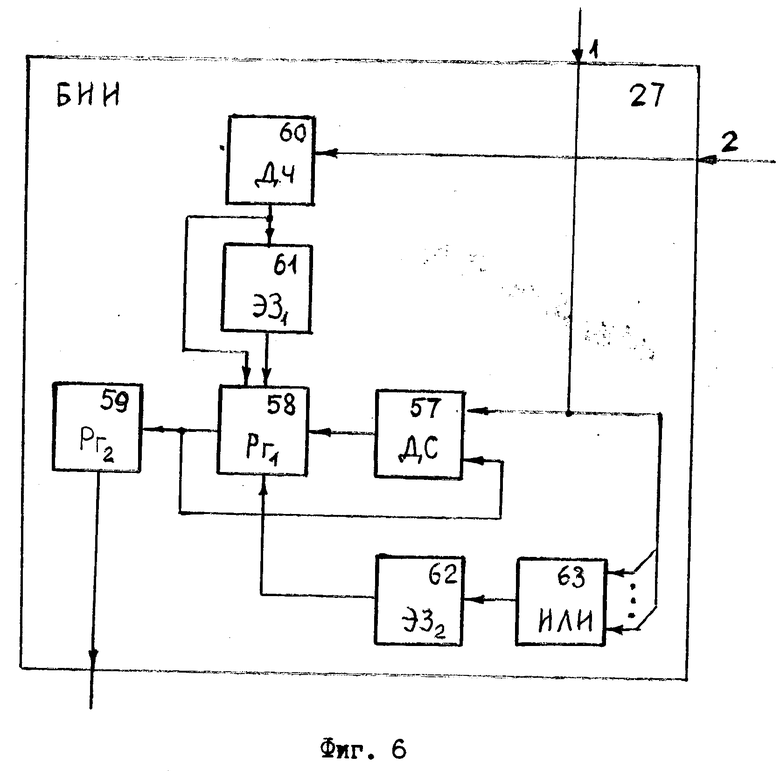
На схеме по фиг. 6 блока 27 измерения интенсивности (БИИ) приняты следующие обозначения:
57 двухвходовый сумматор (ДС);
58 первый регистр (Рг1);
59 второй регистр (Рг2);
60 делитель частоты (ДЧ);
61 первый элемент задержки (ЭЗ1);
62 второй элемент задержки (ЭЗ2);
63 многовходовый элемент "ИЛИ" (ИЛИ).
В блоке 27 измерения интенсивности БИИ на фиг. 6 вход делителя 60 частоты (ДЧ) соединен со вторым входом блока, а выход со входом сигнала считывания непосредственно и входом установки в ноль регистра (Рг1) 58 через элемент 61 задержки (ЭЗ1), первый вход двухвходового сумматора (ДС) 57 соединен с первым входом БИИ 27, и поразрядно со входами элемента ИЛИ 63, выход которого соединен со входом записи Рг1 58 через элемент 62 задержки (ЭЗ2). Вход Рг1 58 соединен с выходом ДС 57, а выход - со вторым входом ДС 57 и входом регистра (РГ2) 59, выход которого соединен с выходом БИИ 27.
На схеме дальномера 48 (Д) по фиг. 7 приняты следующие обозначения:
64 дискриминатор дальности (ДД);
65 коммутатор (Км);
66 реверсивный счетчик (РС);
67 преобразователь код-временной интервал (ПКВИ).
На фиг. 7 первый вход дальномера (Д) 48 является информационным входом дискриминатора 64 дальности (ДД), выход которого соединен с первым входом коммутатора (Км) 65, второй вход коммутатора 65 соединен с третьим входом дальномера 48, а выход со входом реверсивного счетчика (РС) 66. Второй вход реверсивного счетчика 66 соединен с четвертым входом дальномера 48, выход реверсивного счетчика 66 соединен со входом преобразователя 67 код-временной интервал (ПКВИ) и подключен к выходу 1 дальномера 48, второй вход преобразователя 67 является вторым входом дальномера 48, а третий вход преобразователя пятым входом дальномера. Первый выход преобразователя 67 соединен с выходом 2 дальномера 48 и со вторым входом дискриминатора 64 дальности, второй выход преобразователя 67 с выходом 3 дальномера 48.
На схеме блока 9 перестройки частоты (БПЧ) по фиг. 8 приняты следующие обозначения:
68 генератор шума (ГШ);
69 усилитель-ограничитель (УО);
70 коммутатор (Км);
71 счетчик (Сч);
72 элемент "И" (И);
73 регистр (Р);
74 дешифратор (Дш).
На фиг. 8 управляющий вход элемента "И" 72 является первым входом блока 9 перестройки частоты (БПЧ), сигнальные входы элемента "И" соединены с соответствующими выходами счетчика (Сч) 71, ко входу которого через коммутатор (Км) 70 подключены последовательно соединенные генератор 68 шума (ГШ) и усилитель-ограничитель (УО) 69, управляющий вход коммутатора 70 подключен ко второму входу блока 9 перестройки частоты, а выходы элемента "И" 72 поразрядно соединены с регистром (Р) 73, выходы которого подключены к дешифратору (Дш) 74, выходы последнего образуют выход блока 9 перестройки частоты.
На схеме синхронизатора 10 по фиг. 9 приняты следующие обозначения:
75 задающий генератор (ЗГ);
76 делитель частоты (ДЧ);
77 счетчик (Сч);
78 дешифратор (Дш);
79 блок триггеров (БТр).
На фиг. 9 вход синхронизатора (С) 10 является управляющим входом делителя 76 частоты (ДЧ), к сигнальному входу которого подключен выход задающего генератора (ЗГ) 75, а выход делителя 76 частоты подключен ко входу счетчика (Сч) 77 и к выходу 3 синхронизатора 10. Выходы счетчика 77 через дешифратор (Дш) 78 соединены со входами блока 79 RS-триггеров (БТр), выходы которого соединены с выходами 1, 2, 4 синхронизатора 10.
На фиг. 10 представлены временные диаграммы напряжений на выходах синхронизатора 10, а именно:
80 импульсы, с частотной  с длительностью τ1 ≪ τи на выходе 1 синхронизатора, с упреждением на время перестройки τf относительно начала периода, предназначенные для управления блоком 9 перестройки частоты;
с длительностью τ1 ≪ τи на выходе 1 синхронизатора, с упреждением на время перестройки τf относительно начала периода, предназначенные для управления блоком 9 перестройки частоты;
81 импульсы с частотой  с длительностью τ2 = Tи на выходе 2 синхронизатора, предназначенные для управления генератором 8 кода и импульсным модулятором 7;
с длительностью τ2 = Tи на выходе 2 синхронизатора, предназначенные для управления генератором 8 кода и импульсным модулятором 7;
82 импульсы с частотой  и длительностью τ3 ≪ τи на выходе 3 синхронизатора, предназначенные для управления генератором 8 кода и устройством 22 обработки информации (дальномером 48);
и длительностью τ3 ≪ τи на выходе 3 синхронизатора, предназначенные для управления генератором 8 кода и устройством 22 обработки информации (дальномером 48);
83 импульсы с частотой Fп с длительностью τ4 ≪ τи на выходе 4 синхронизатора с задержкой на Tи относительно начала периода повторения, предназначенные для управления цифровыми согласованными фильтрами 18, 19, блоком 23 формирования порогов и устройством 22 обработки информации (блоком 47 первичной обработки и дальномером 48).
Антенный переключатель 2 может быть выполнен, например, в виде трехплечевого ферритового Y-циркулятора.
Регулятор мощности 3 может быть реализован, например, по схеме, приведенной в [3]
Усилитель мощности (УМ) 4 СВЧ-усилитель с импульсной модуляцией, реализуемый, в зависимости от требуемой мощности и полосы усиливаемых частот, на основе электровакуумного прибора (амплитрон, лампа бегущей волны, многолучевой клистрон и т.п.) или полупроводникового прибора [5]
Фазовый манипулятор (ФМ) 5 может быть выполнен, например, по схеме [2] причем в качестве СВЧ-линий задержки может использоваться отрезок полоскового волновода, коммутируемый СВЧ-диодами, которые управляются импульсами, поступающими от генератора 8 кодов. Возбудитель (В) 6 может быть выполнен, например, по схеме, приведенной в [2] в составе генератора несущей частоты fc, частота которого может скачкообразно перестраиваться от периода к периоду под действием управляющего сигнала от блока 9 перестройки частоты, генератора опорной частоты, равной промежуточной частоте приемника fоп fпч, гетеродина, генерирующего колебания с частотой fг, перестраиваемой синхронно с частотой fс, и блока фазовой автоподстройки частоты, обеспечивающего выполнение равенства  при требуемой высокой кратковременной стабильности частот fг и fс.
при требуемой высокой кратковременной стабильности частот fг и fс.
Импульсный модулятор (ИМ) 7 в зависимости от параметров УМ реализуется по известным схемам (см. [5, с. 103-107, рис. 43-45]).
Генератор кода (ГК) 8 может быть реализован по схеме, содержащей последовательно включенные вентиль синхроимпульсов и сдвиговый регистр с обратными связями через сумматоры по модулю 2 для формирования псевдослучайной М-последовательности (см. например, [5, с. 421, рис. 17] или [6, с. 147-153] ).
Дискриминатор 21 угла по смыслу выполняет операцию формирования сигнала углового рассогласования путем образования скалярного произведения суммарного и разностного сигналов после их сжатия в соответствующих ЦСФ1, ЦСФ2. С этой целью он содержит два перемножителя и сумматор блок объединения квадратур в соответствии с правилом
где  комплексные сигналы на выходе суммарного и разностного каналов соответственно (после ЦСФ), а символ * означает "комплексно-сопряженный".
комплексные сигналы на выходе суммарного и разностного каналов соответственно (после ЦСФ), а символ * означает "комплексно-сопряженный".
Это правило, как известно, отличается от оптимального лишь отсутствием нормировки [7]
Суммарно-разностный преобразователь (СРП) 31 в антенне (А) 1 может быть выполнен, например, на основе волноводных Т-мостов.
Усилитель 33 высокой частоты (УВЧ) в приемнике (Пр) 11 может быть реализован в виде транзисторного двухканального СВЧ-усилителя.
Смеситель (См) 34 в приемнике 11 выполняется в виде двухканального балансного смесителя (см. например, [5, с. 144]).
Усилитель 35 промежуточной частоты (УПЧ) в приемнике 11 с целью идентичности амплитудно-фазовых характеристик суммарного и разностного приемных каналов выполняется совмещенным двухканальным, например, на основе частотного разделения каналов по схеме, приведенной в [8]
Блок 47 первичной отработки (БПО) в устройстве 22 обработки информации (УОИ) может быть выполнен по схеме, приведенной в монографии [9, с. 255, рис. 3.17] Блок 49 вторичной обработки информации (БВО), входящий в УОИ 22, может быть реализован на основе цифровой вычислительной машины (ЦВМ), работа которой состоит в последовательном решении задач, представленных на блок-схеме (фиг. 11):
1. После включения режима обзора производится межобзорная обработка информации, состоящая в накоплении дискретных сигналов, соответствующих решениям, принятым по результатам каждого из обзоров в БПО после их отождествления по координатным признакам с учетом движения носителя РЛС, и вынесение окончательного решения о наличии или отсутствии сигналов от целей, например, по критерию "К из М" (по крайней мере, К решений о наличии сигнала от цели в серии из М обзоров).
Далее, производится счет числа обнаруженных целей I и, если оно не меньше заранее установленного порогового числа I* зависящего от типа обнаруживаемой цели (в частности, для одиночной цели I* 1), БВО переходит к следующему пункту программы, в противном случае, т.е. при I < I* обзор выключается на заданное время, затем вновь включается и выполняется п.1.
2. При выполнении условия I > I* производится сопровождение по дальности и угловым координатам поочередно каждой из обнаруженных целей i 1, 2 I, для чего выдаются команда с выхода 1 БВО 49 на вход 3 Д 48 на замыкание контура дальномера и значения Ri с выхода 2 БВО 49 на вход 4 Д 48 (начальная дальность сопровождения), а также значения ji (начальной угловой координаты) с выхода 3 БВО 49 через выход 2 УОИ 22 на вход 2 А1, причем с выхода 2 Д 48 через выход 1 УОИ 22 поступают стробирующие сигналы на управляющие входы К1 24 и К2 25, замыкающие контура сопровождения по угловой координате и интенсивности.
3. На вход 2 БПЧ 9 с выхода 5 БВО 49 через выход 4 УОИ 22 поступает команда на прекращение случайной перестройки несущей частоты передатчика.
4. Производится классификация сопровождаемой i-той цели по спектрально-корреляционным характеристикам межпериодных флюктуаций принимаемых сигналов, для чего производится спектральный анализ комплексной огибающей пачки сигналов, например, методом быстрого преобразования Фурье (БПФ), измерение ширины полученного спектра, например, по уровню "-3 дБ", сравнение ее с пороговым значением и принятие решения о классе цели (истинная или ложная) в зависимости от результатов этого сравнения (в частности, если ширина спектра меньше порогового значения цель истинная, в противном случае - ложная). После окончания классификации i-той цели п.п. 2-4 повторяются для i i + 1 и так до i I, при этом ложные цели исключаются из дальнейшего рассмотрения.
5. Выбор цели для сопровождения, например, путем определения координат цели Rц, ψц, находящейся ближе всех к точке с координатами
где L ≅ I число истинных целей.
6. Выдача координаты Rц выбранной цели с выхода 2 БВО 49 на вход 4 Д 48 и координаты ψц с выхода 3 БВО 49 через выход 2 УОИ 22 на вход 2 А1 одновременно с подачей команды на замыкание контура сопровождения по дальности с выхода 1 БВО 49 на вход 3 Д 48.
7. Сравнение текущей дальности Rц(t), поступающей с выхода 1 Д 48 на вход 2 БВО 49 и переход на вид сигнала 2 при выполнении условия Rц(t) ≅ 0,5Rо, где Rо- заранее установленная дальность (например,
где Tи1- длительность сигнала вида 1) с выдачей команды с выхода 4 БВО 49 через выход 3 УОИ 22 на вход синхронизатора 10, по которой происходит переключение С 10 на режим с повышенной тактовой частотой  и на управляющие входы видеоусилителей (ВУ) 14, 15 для изменения полосы видеоусилителей с целью согласования ее с дискретом τи фазовой манипуляции.
и на управляющие входы видеоусилителей (ВУ) 14, 15 для изменения полосы видеоусилителей с целью согласования ее с дискретом τи фазовой манипуляции.
В соответствии с рассмотренной структурной схемой предлагаемая РЛС работает следующим образом.
Возбудитель 6 передатчика генерирует непрерывные колебания частоты сигнала fсi, гетеродина fгi, и опорные колебания промежуточной частоты fпч, при этом частоты fсi, fгi высоко стабильны в течение одного периода повторения Tп зондирующих импульсов, но могут меняться скачком от периода к периоду по случайному закону под действием сигналов от блока 9 перестройки частоты, принимая одно из nf значений (i 1, 2, 3, nf), причем так, что всегда выполняется соотношение
Перестройка частот fсi, и fгi, производится с помощью блока 9 перестройки частоты (БПЧ), работающего следующим образом (фиг. 8).
Генератор 68 шумового напряжения (ГШ), построенный, например, на основе шумового диода, генерирует колебания шумов с шириной спектра, значительно превосходящей частоту повторения (Δfш ≫ Fп), далее эти колебания усиливаются и ограничиваются в усилителе-ограничителе (УО) 69 и поступают через коммутатор (Км) 70 на счетчик (Сч) 71, который осуществляет счет, например, положительных фронтов по модулю nf и имеет, таким образом, nf равновероятных состояний. В момент, определяемый синхроимпульсами, поступающими через период повторения Tп с выхода 1 синхронизатора 10 с упреждением на время τf относительно начала следующего периода, показания счетчика 71 через элемент "И" 72 записываются в регистр (Р) 73 и преобразуются в дешифраторе (Дш) 74 в параллельный код с числом разрядов nf, который сохраняется в течение одного периода повторения и определяет значения частот fсi, и fгi в следующем периоде повторения.
Колебания частоты сигнала fсi поступают в фазовый манипулятор (ФМ) 5, где манипулируются по фазе на уровни 0, π, двоичным многоразрядным кодом (число разрядов N), формируемым в генераторе 8 кодов (ГК), усиливаются по мощности в усилителе 4 мощности (УМ), формирующем под действием импульсного модулятора (ИМ) 7 зондирующие импульсы с длительностью Tи с внутриимпульсной фазовой манипуляцией (ФМ) N-разрядным двоичным кодом. Зондирующие импульсы, образованные в передатчике, проходя регулятор 3 мощности (РМ), который в режиме обзора имеет минимальное затухание (коммутатор 25 разомкнут), и антенный переключатель (АП) 2, попадают в антенну 1 (через суммарно-разностный преобразователь (СРП) 31 в антенный блок (АБ) 30) и излучаются в пространство. При этом в режиме обнаружения привод антенны (ПА) 32 работает автономно, осуществляя обзор пространства (коммутатор 24 разомкнут).
Принимаемые сигналы попадают на входы 1, 2 приемника (Пр) 11, где, проходя через двухканальный усилитель 33 высокой частоты (УВЧ), поступают на двухканальный смеситель (СМ) 34, осуществляющий в каждом приемном канале с помощью колебаний гетеродинной частоты fгi, приходящих из возбудителя 8 передатчика, преобразование на промежуточную частоту, усиливаются в двухканальном усилителе 35 промежуточной частоты (УПЧ) и поступают на входы блоков квадратурных фазовых детекторов (ФД1,2) 12, 13 суммарного и разностного каналов соответственно. На вторые входы квадратурных фазовых детекторов 12, 13 поступают в качестве опорных колебания частоты fпч, формируемые в возбудителе 8 передатчика, причем на входы опорных колебаний первых каналов двухканальных фазовых детекторов они поступают непосредственно (одноименные, например, косинусные квадратуры суммарного и разностного каналов соответственно), а на входы опорных колебаний вторых каналов квадратурных двухканальных фазовых детекторов они поступают через фазовращатели, осуществляющие поворот фазы опорных колебаний на 90o (синусные квадратуры суммарного и разностного каналов соответственно).
На выходах блоков 12 и 13 квадратурных фазовых детекторов образуются квадратурные составляющие двухполярных видеосигналов, полярность которых меняется в соответствии с кодом ФМ принимаемых сигналов, эти сигналы поступают через амплитудные квантователи (АК1, АК2) 16, 17 на цифровые согласованные фильтры (ЦСФ1, ЦСФ2) 18, 19, в которых осуществляется согласованная фильтрация (сжатие) сигналов.
Цифровые согласованные фильтры (см. фиг. 2) работают следующим образом.
На входы 1, 2 идентичных квадратурных каналов ЦСФ 18 (19) поступают с выходов амплитудных квантователей 16 (17) двоично квантованные сигналы x , поступающими через входы 5 ЦСФ на соответствующие входы сдвиговых регистров 36 (37). Сигналы со всех N разрядов сдвиговых регистров попадают в многовходовые сумматоры СМc 40 (СМs 41) через оперативные запоминающие устройства кодов (ОЗУКс, ОЗУКs) 38 (39), в которые перед началом приема в данном периоде повторения записываются кодовые символы Vj, (0 или 1), поступающие из генератора 8 кодов через вход 3 ЦСФ 18 (19).
, поступающими через входы 5 ЦСФ на соответствующие входы сдвиговых регистров 36 (37). Сигналы со всех N разрядов сдвиговых регистров попадают в многовходовые сумматоры СМc 40 (СМs 41) через оперативные запоминающие устройства кодов (ОЗУКс, ОЗУКs) 38 (39), в которые перед началом приема в данном периоде повторения записываются кодовые символы Vj, (0 или 1), поступающие из генератора 8 кодов через вход 3 ЦСФ 18 (19).
В блоках 38 (39) происходит поразрядное суммирование сигналов с кодовыми символами по модулю 2, а в блоках 40 (41) суммирование всех N разрядов между собой. Эти суммарные сигналы далее поступают на первые входы двухвходовых сумматоров СДc, СДs 42 (43), на объединенные вторые входы которых поступает число N/2. В результате на выходах 1, 2 ЦСФ 18 (19) появляются квадратурные составляющие сжатых сигналов суммарного (разностного) каналов в соответствии с выражением
то есть осуществляется согласованная фильтрация двоично-квантованных ФМ видеосигналов. Сжатые сигналы с выходов цифрового согласованного фильтра суммарного канала (ЦСФ1) 18, пропорциональные (при малых отношениях сигнал/шум до сжатия a) величинам N•a•gΣcosΦ, N•a•gΣsinΦ (Φ - случайная начальная фаза, gΣ усиление антенны суммарного канала), поступают на блок 20 объединения квадратур, в котором эти сигналы объединяются по правилу "сумма квадратов", то есть
в результате сигнал на выходе 3 блока 20 объединения квадратур (см. фиг. 4) не зависит от начальной фазы Φ. Этот сигнал Yi, а также сигналы y
Сигнал Yi с выхода 3 блока 20 объединения квадратур поступает через вход 3 (Σкв) УОИ на вход 1 блока 46 сравнения с порогом (БСП), и при наличии превышения порогового уровня, поступающего на вход 2 блока 46 сравнения с порогом через вход 7 УОИ 22 с выхода блока 23 формирования порогов, вырабатывается нормированный сигнал.
Нормированные сигналы поступают на входы 1 блока 47 первичной обработки (БПО) и дальномера (Д) 48. В блоке 47 первичной обработки происходит межпериодное накопление сигналов, обнаружение пачек по критерию "k из n" и измерение координат обнаруженных целей (дальности и азимута) в процессе обзора. Координаты обнаруженных целей за каждый цикл обзора поступают на вход 1 блока 49 вторичной обработки, где производится межобзорная обработка, как описано выше.
В режиме селекции РЛС производит сопровождение по дальности и по угловым координатам поочередно каждой из обнаруженных целей, как описано выше, при этом прекращается перестройка несущей частоты зондирующих сигналов и работа производится на фиксированной частоте по команде, поступающей с выхода 5 БВО 49 через выход 4 УОИ 22 на вход 2 БПЧ 9. Одновременно стробирующий импульс с выхода 2 Д 48 поступает на двухканальную ключевую схему (Кл) 44, на сигнальные входы которой поступают квадратурные составляющие сжатых сигналов с выходов 1, 2 БОК 20, осуществляя стробирование сжатых сигналов от селектируемой цели. Эти сигналы записываются в буферное запоминающее устройство (БЗУ) 45, откуда поступают в БВО 49 в удобном для него темпе, в БВО 49 производится спектральный анализ огибающих межпериодных флюктуаций сигналов и селекция ложных целей по ширине спектра, а также выбор цели, как описано выше, и переход на сопровождение выбранной цели.
Рассмотрим подробнее работу РЛС в режиме сопровождения.
В режиме сопровождения по сигналу, поступающему с третьего выхода БВО 49 (2-й выход УОИ 22) на второй вход привода 32 антенны 1, последний переводится из автономного режима в режим слежения и на него подается значение азимута выбранной цели, одновременно по команде, поступающей с первого выхода БВО 49 на третий вход дальномера 48, замыкается посредством коммутатора (Км) 65 контур сопровождения по дальности (фиг. 7), одновременно код дальности выбранной цели Rц поступает со второго выхода БВО 49 через четвертый вход дальномера 48 на реверсивный счетчик (РС) 66 и с него на преобразователь 67 код-временной интервал, который формирует строб дальности. Этот строб через второй выход дальномера и первый выход УОИ проходит на управляющие входы коммутаторов 24 и 25, замыкая контура углового сопровождения и регулировки мощности зондирующих сигналов, и на второй вход дискриминатора дальности (ДД) 64, на выходе которого образуется сигнал рассогласования, поступающий через коммутатор 65 на реверсивный счетчик 66, на выходе последнего образуется код текущей дальности, он, в свою очередь, проходит на первый вход преобразователя 67 код-временной интервал, сдвигая положение строба на втором выходе дальномера 48 и втором входе дискриминатора дальности, и т.д.
Последовательность тактирующих импульсов с частотой  -интервал квантования по времени, равный длительности одного разряда кода ФМ, то есть
-интервал квантования по времени, равный длительности одного разряда кода ФМ, то есть  поступает с третьего выхода синхронизатора 10 через вход 5 УОИ 22 и вход 2 дальномера 48 на младшие разряды преобразователя 67 код временной интервал (вход 2 ПКВИ 67) и, сдвигаясь в соответствии с поправкой дальности, образующейся в дискриминаторе 64 дальности и реверсивном счетчике 66, на величины, измеряемые долями τи, поступает затем через выход 3 дальномера 48 на вход 3 БПО 47, а также через выход 5 УОИ 22 на входы 5 цифровых согласованных фильтров 18, 19, это обеспечивает перемещение сжатых сигналов по оси времени с малой дискретностью
поступает с третьего выхода синхронизатора 10 через вход 5 УОИ 22 и вход 2 дальномера 48 на младшие разряды преобразователя 67 код временной интервал (вход 2 ПКВИ 67) и, сдвигаясь в соответствии с поправкой дальности, образующейся в дискриминаторе 64 дальности и реверсивном счетчике 66, на величины, измеряемые долями τи, поступает затем через выход 3 дальномера 48 на вход 3 БПО 47, а также через выход 5 УОИ 22 на входы 5 цифровых согласованных фильтров 18, 19, это обеспечивает перемещение сжатых сигналов по оси времени с малой дискретностью  (например, m 4-16), то есть высокую точность сопровождения цели по дальности.
(например, m 4-16), то есть высокую точность сопровождения цели по дальности.
В дискриминаторе 21 угла путем цифрового перемножения сжатых сигналов с выходов одноименных квадратур ЦСФ 18, 19 суммарного и разностного каналов и суммирования образуется двухполярный сигнал углового рассогласования, который, в простейшем случае, может принимать одно из трех значений: +1, 0, -1 в зависимости от положения направления на цель относительно равносигнального направления. Выходной сигнал дискриминатора 21 угла, представляющий собой, например, двухразрядный код, поступает через коммутатор 24 в интегратор 26 сигналов углового рассогласования (ИУ). После накопления в интеграторе 26 образуется управляющий сигнал, который поступает через вход 1 антенны на вход 1 привода 32 антенны, управляющий положением подвижного зеркала антенного блока 30 и обеспечивающий сопровождение по угловой координате.
Сжатый сигнал от сопровождаемой цели с выхода 3 блока 20 объединения квадратур проходит через коммутатор 25 в режиме сопровождения на информационный вход блока 27 измерения интенсивности (БИИ). Измерение интенсивности в блоке 27 (см. фиг. 6) производится следующим образом.
Интервал накопления определяется путем деления делителем 60 частоты повторения импульсного сигнала, поступающего на вход 2 блока 27 с выхода 4 синхронизатора 10. Сигнал с выхода делителя 60 частоты, представляющего собой двоичный счетчик, переписывает содержимое регистра 58 в выходной регистр 59, а затем устанавливает в ноль регистр 58 через элемент 61 задержки. Накапливаемый сигнал со входа 1 блока 27 поступает на первый вход накапливающего сумматора, образованного двухвходовым сумматором (ДС) 57 и регистром 58. Сигнал записи в регистр 58 формируется путем объединения по ИЛИ и задержки всех разрядов накапливаемого сигнала так, что при наличии единицы хотя бы в одном разряде входного сигнала вызывает запись через элемент 63 ИЛИ и элемент 62 задержки. При этом в накапливающем сумматоре образуется результат, равный сумме ранее накопленной величины и очередного значения входного сигнала. Один раз за интервал накопления накопленный результат переписывается в регистр 59 и поступает на выход блока 27 измерения интенсивности, а затем регистр 58 обнуляется.
Код интенсивности сжатых сигналов сопровождаемой цели поступает на вход дешифратора 28 градаций мощности, представляющего собой параллельное соединение дешифраторов (по числу разрядов кода интенсивности). На выходе дешифратора 28 градаций мощности образуется параллельный код мощности зондирующих сигналов, соответствующий значению интенсивности принимаемых сигналов. Этот код поступает на преобразователь 29 код-напряжение (ПКН), вырабатывающий соответствующее значение тока, которое управляет затуханием регулятора 3 мощности (РМ). Регулятор 3 мощности, меняя затухание по СВЧ, устанавливает необходимую мощность излучаемых сигналов, соответствующую требуемой мощности эхо-сигналов. Это, в свою очередь, приводит к регулированию мощности эхо-сигналов от сопровождаемой цели, стабилизируя ее, а значит, и добротность контуров сопровождения по дальности и по угловым координатам на заданном уровне.
Стабилизация добротности контуров приводит к повышению точности сопровождения. Кроме того, регулировка мощности излучения на заданном уровне приводит к повышению скрытности, а следовательно, и к повышению помехозащищенности РЛС по отношению к средствам ответных помех.
При уменьшении дальности до сопровождаемой цели R до значений, меньших величины  (Tи длительность зондирующих импульсов, c скорость света), часть отраженного сигнала, приходящая на вход приемного устройства с задержкой в интервале от 0 до Tи ("мертвая зона") относительно начала периода повторения, не будет приниматься вследствие бланкирования импульсом передатчика, длительность же принимаемой части сигнала при этом составляет величину
(Tи длительность зондирующих импульсов, c скорость света), часть отраженного сигнала, приходящая на вход приемного устройства с задержкой в интервале от 0 до Tи ("мертвая зона") относительно начала периода повторения, не будет приниматься вследствие бланкирования импульсом передатчика, длительность же принимаемой части сигнала при этом составляет величину  то есть уменьшается пропорционально уменьшению дальности до сопровождаемой цели. Для того чтобы в этих условиях осуществить согласованную фильтрацию, необходимо в соответствии с уменьшением длительности принимаемых сигналов изменять и число разрядов регистров 36, 37 сдвига (фиг. 2), участвующих в образовании сжатого сигнала. С этой целью в начале очередного периода повторения на входы 4 цифровых согласованных фильтров 18, 19 поступает сигнал обнуления от синхронизатора 10, который проходит на установочные шины сдвигающих регистров 36, 37 и устанавливает их в нулевое положение. Сигнал от сопровождаемой цели на дальности R <R0, поступающий на входы 1, 2 ЦСФ 18 (19) сразу после окончания зондирующего импульса передатчика, занимает
то есть уменьшается пропорционально уменьшению дальности до сопровождаемой цели. Для того чтобы в этих условиях осуществить согласованную фильтрацию, необходимо в соответствии с уменьшением длительности принимаемых сигналов изменять и число разрядов регистров 36, 37 сдвига (фиг. 2), участвующих в образовании сжатого сигнала. С этой целью в начале очередного периода повторения на входы 4 цифровых согласованных фильтров 18, 19 поступает сигнал обнуления от синхронизатора 10, который проходит на установочные шины сдвигающих регистров 36, 37 и устанавливает их в нулевое положение. Сигнал от сопровождаемой цели на дальности R <R0, поступающий на входы 1, 2 ЦСФ 18 (19) сразу после окончания зондирующего импульса передатчика, занимает  разрядов регистров 36, 37, остальные же разряды не участвуют в образовании выходного сигнала. В соответствии с изложенным дисперсия шумов на выходе ЦСФ в этом режиме при R <R0 также уменьшается пропорционально уменьшению дальности до цели, поэтому для повышения вероятности правильного обнаружения при фиксированной вероятности ложного обнаружения порог первичного обнаружения на выходе 3 блока 20 объединения квадратур в блоке 46 сравнения с порогом, входящем в устройство 22 обработки информации снижается с уменьшением дальности до цепи. Это достигается с помощью блока 23 формирования порогов. На первый вход этого блока поступает последовательность тактирующих импульсов с частотой fT от дальномера 48 (с выхода 3 Д 48 через выход 5 УОИ 22), сдвигающаяся по оси времени в соответствии с изменением дальности до цели ("подвижная сетка"), необходимая для формирования порога, меняющегося в функции от текущей дальности до сопровождаемой цели. Подвижная сетка, как уже упоминалось выше, поступает одновременно также на входы 5 цифровых согласованных фильтров 18, 19 (на сдвигающие шины регистров 36, 37), обеспечивая перемещение сжатого сигнала по оси времени с малой дискретностью.
разрядов регистров 36, 37, остальные же разряды не участвуют в образовании выходного сигнала. В соответствии с изложенным дисперсия шумов на выходе ЦСФ в этом режиме при R <R0 также уменьшается пропорционально уменьшению дальности до цели, поэтому для повышения вероятности правильного обнаружения при фиксированной вероятности ложного обнаружения порог первичного обнаружения на выходе 3 блока 20 объединения квадратур в блоке 46 сравнения с порогом, входящем в устройство 22 обработки информации снижается с уменьшением дальности до цепи. Это достигается с помощью блока 23 формирования порогов. На первый вход этого блока поступает последовательность тактирующих импульсов с частотой fT от дальномера 48 (с выхода 3 Д 48 через выход 5 УОИ 22), сдвигающаяся по оси времени в соответствии с изменением дальности до цели ("подвижная сетка"), необходимая для формирования порога, меняющегося в функции от текущей дальности до сопровождаемой цели. Подвижная сетка, как уже упоминалось выше, поступает одновременно также на входы 5 цифровых согласованных фильтров 18, 19 (на сдвигающие шины регистров 36, 37), обеспечивая перемещение сжатого сигнала по оси времени с малой дискретностью.
В момент, когда дальность до сопровождаемой цели снижается до величины дальности  (информация о дальности в режиме сопровождения передается с первого выхода дальномера 48 (фиг. 3) на второй вход блока 49 вторичной обработки), длительность излучаемых импульсов снижается, например, в 2 раза путем уменьшения соответственно в 2 раза длительности дискретов и при сохранении разрядности N кодов ФМ.
(информация о дальности в режиме сопровождения передается с первого выхода дальномера 48 (фиг. 3) на второй вход блока 49 вторичной обработки), длительность излучаемых импульсов снижается, например, в 2 раза путем уменьшения соответственно в 2 раза длительности дискретов и при сохранении разрядности N кодов ФМ.
Это достигается по команде БВО 49, поступающей с выхода 4 БВО через выход 3 УОИ 22 на вход синхронизатора 10 и на управляющие входы видеоусилителей 14, 15 путем повышения частоты тактирующих импульсов  например, в 2 раза с одновременным уменьшением длительности зондирующих импульсов Tи = Nτи и расширением (в рассматриваемом примере в 2 раза) полосы пропускания видеоусилителей 14, 15, определяющей общую полосу пропускания приемных каналов (суммарного и разностного), выбираемую из условия
например, в 2 раза с одновременным уменьшением длительности зондирующих импульсов Tи = Nτи и расширением (в рассматриваемом примере в 2 раза) полосы пропускания видеоусилителей 14, 15, определяющей общую полосу пропускания приемных каналов (суммарного и разностного), выбираемую из условия  Таким образом, достигается при сохранении энергии принимаемых сигналов (с учетом бланкирования), во-первых, снижение уровня боковых лепестков, который при дальнейшем снижении разрядности принимаемой части эхо-сигналов оказался бы чрезмерно большим, во-вторых, повышение разрешающей способности по дальности, что позволяет повысить точность сопровождения по дальности и помехозащищенность по отношению к пассивным помехам.
Таким образом, достигается при сохранении энергии принимаемых сигналов (с учетом бланкирования), во-первых, снижение уровня боковых лепестков, который при дальнейшем снижении разрядности принимаемой части эхо-сигналов оказался бы чрезмерно большим, во-вторых, повышение разрешающей способности по дальности, что позволяет повысить точность сопровождения по дальности и помехозащищенность по отношению к пассивным помехам.
Техническим преимуществом предлагаемой РЛС перед устройством-прототипом является то, что она позволяет повысить скрытность и помехозащищенность при одновременном повышении точности сопровождения по дальности и по угловым координатам.
Повышение скрытности и помехозащищенности по отношению к ответным помехам в режимах обнаружения и сопровождения определяется возможностью значительного повышения длительности сложных ФМ-сигналов по сравнению с прототипом при сохранении их энергии, требуемой для достижения заданной дальности обнаружения цели благодаря применению ЦСФ на видеочастоте.
Длительность зондирующих импульсов Tи в предлагаемой РЛС может быть повышена по крайней мере на порядок по сравнению с прототипом, то есть с 10-20 мкс (в прототипе) до 200-500 мкс. При сохранении импульсной энергии, равной
Eи=TиPи
и определяемой заданной дальностью обнаружения, это означает возможность соответствующего уменьшения (в 10-50 раз) импульсной мощности Pи а следовательно, скрытности и помехозащищенности по отношению к ответным помехам, наводимым приемниками исполнительной разведки (ИР).
Повышение помехозащищенности заявляемой РЛС по сравнению с прототипом на дальностях, меньших предельной, в том числе при сопровождении, определяется следующим.
Мощность зондирующих импульсов РЛС на входе приемника ИР постановщика помех на дальности R от РЛС при отсутствии регулирования мощности передатчика (в прототипе) определяется из соотношения
где Rmax дальность начала наблюдения, в частности, сопровождения цели.
При наличии регулирования (в заявляемой РЛС) получим (2)
(2)
Благодаря применению регулирования имеем выигрыш в скрытности в заявляемой РЛС по сравнению с прототипом в  раз (при R > R0).
раз (при R > R0).
На фиг. 14 зависимости (1) и (2) представлены кривыми 1 и 2 соответственно. Как легко видеть, при R R0 0,25Rmax выигрыш в скрытности составляет 24 дБ. Покажем на примере, что повышение скрытности ведет также и к повышению помехозащищенности по отношению к ответным помехам.
Условие создания ответных помех состоит в превышении мощностью Pпр на входе приемника ИР его пороговой чувствительности Pпр.мин.. Имеем выражение
где Pпер мощность передатчика РЛС,
G, Gn усиление антенны РЛС и станции помех соответственно,
λ длина волны.
Принимая значения G= 500, Gп=10, Pпер=1 кВт, Rmax=40 км, λ = 3•10-2 м, Pпер.min= 10-7,5 Вт 3•10-8 Вт, получим из (3), что при отсутствии регулирования ответные помехи будут действовать на дальностях R < R* (при этом кривая 1 выше прямой 3 Pпр Pпр.min фиг. 11), а при наличии регулирования этого нигде не произойдет (кривая 2 всегда ниже прямой 3 фиг. 12).
3•10-8 Вт, получим из (3), что при отсутствии регулирования ответные помехи будут действовать на дальностях R < R* (при этом кривая 1 выше прямой 3 Pпр Pпр.min фиг. 11), а при наличии регулирования этого нигде не произойдет (кривая 2 всегда ниже прямой 3 фиг. 12).
Обнуление сдвигающих регистров ЦСФ в начале периода повторения одновременно с регулированием порога первичного обнаружения на дальностях  приводит к эквивалентному повышению отношения сигнал/шум в
приводит к эквивалентному повышению отношения сигнал/шум в  раз по сравнению с прототипом (благодаря уменьшению дисперсии шумов, действующих при сжатии), в частности, при
раз по сравнению с прототипом (благодаря уменьшению дисперсии шумов, действующих при сжатии), в частности, при  это повышение составляет в 2 раза (по мощности), то есть 3 дБ. Этот выигрыш означает соответствующий дополнительный выигрыш в скрытности и помехозащищенности по отношению к ответным помехам.
это повышение составляет в 2 раза (по мощности), то есть 3 дБ. Этот выигрыш означает соответствующий дополнительный выигрыш в скрытности и помехозащищенности по отношению к ответным помехам.
Повышение разрешающей способности по дальности на дальностях R < 0,5R0, в частности, в 2 раза способствует повышению помехозащищенности по отношению к пассивным средствам создания помех (дипольные облака, уголковые отражатели). Так, если помеха ставится на расстоянии l от защищаемой цели под углом к направлению распространения  вероятность селекции эхо-сигналов от помехи и от истинной цели при разрешающей способности по дальности ΔR ограничена величиной
вероятность селекции эхо-сигналов от помехи и от истинной цели при разрешающей способности по дальности ΔR ограничена величиной  .
.
В частности, при l=200 м, ΔR = 150 имеем p=0,46, а при ΔR = 75 м p=0,75, таким образом, в рассматриваемом примере вероятность селекции возрастает в 1,6 раза.
Стабилизация добротности контуров автоматического сопровождения по угловым координатам и по дальности благодаря поддержанию мощности принимаемых сигналов на постоянном уровне путем регулирования мощности зондирующих импульсов приводит к повышению точности сопровождения.
Крутизна пеленгационной характеристики углового дискриминатора аппроксимируется зависимостью
где ρэ эквивалентное отношение сигнал/шум после ЦСФ,
ψ0,5 ширина диаграммы направленности антенны по уровню половинной мощности.
Как показывает анализ этой зависимости, построенной на фиг. 13 методом математического моделирования (в единицах 1/ψ0,5), изменение отношения сигнал/шум ρэ на 6 дБ (от 3 дБ до 9 дБ) приводит к изменению крутизны kψ(ρэ) в 2 раза. Рассмотрение зависимости крутизны характеристики дискриминатора дальности kR(ρэ) полученной методом математического моделирования (фиг. 14), приводит к аналогичному результату, кроме того, при больших отношениях сигнал/шум ( ρэ > 10 дБ) дискриминатор по дальности становится существенно нелинейным и крутизна kR(ρэ) падает с ростом ρэ.
Рассмотрение эквивалентной схемы контура сопровождения по угловым координатам и по дальности в линейном приближении (фиг. 15) позволяет получить выражения для ошибок сопровождения. В частности, дисперсия флюктуационной ошибки и значение динамической ошибки углового сопровождения выражаются в виде
где DUψ дисперсия сигнала рассогласования на выходе дискриминатора,
a коэффициент передачи интегратора,
w угловая скорость перемещения линии визирования на сопровождаемую цель.
Выражения для ошибок сопровождения по дальности имеют вид, аналогичный (4), (5), и получаются из них путем замен j _→ R, ω _→ v причем v составляющая скорости перемещения цели относительно РЛС вдоль направления распространения.
Как видно из выражений (4), (5), умещение крутизны kψ(ρэ) ведет к росту ошибок углового сопровождения, увеличение же крутизны с ростом отношения сигнал/шум приводит к потере устойчивости контура.
Аналогичная ситуация имеет место и для сопровождения по дальности.
В заявляемой РЛС путем регулирования мощности излучаемых импульсов достигается стабилизация отношения сигнал/шум принимаемых сигналов, а следовательно, крутизны характеристик дискриминаторов и добротности контуров сопровождения по угловым координатам и по дальности. Как следует из вышеизложенного, это приводит к повышению точности сопровождения в 1,5-2 раза и обеспечивает устойчивость контуров сопровождения.
Применение "подвижной сетки" движения последовательности тактирующих импульсов по оси времени с малой дискретностью  с изменением дальности до сопровождаемой цели ведет к снижению ошибок сопровождения по дальности вследствие дискретности вплоть до их практического устранения. Ошибка из-за дискретности при этом уменьшается в m раз и становится меньше ошибки за счет шумов. Так, например, при τи = 1 мкс и σR = 4,5 м и неподвижной сетке получим для стандартного отклонения ошибки из-за дискретности величину
с изменением дальности до сопровождаемой цели ведет к снижению ошибок сопровождения по дальности вследствие дискретности вплоть до их практического устранения. Ошибка из-за дискретности при этом уменьшается в m раз и становится меньше ошибки за счет шумов. Так, например, при τи = 1 мкс и σR = 4,5 м и неподвижной сетке получим для стандартного отклонения ошибки из-за дискретности величину
применение же "подвижной сетки" способно уменьшить эту ошибку в m=16 раз, доведя ее до 2,5 м, так что результирующая ошибка составляет около 5 м, то есть влияние дискретности практически устраняется.
Таким образом, реализация предлагаемых мер приведет к существенному повышению скрытности, помехозащищенности и точности сопровождения РЛС автономных и командных систем управления.
Эффективность предлагаемой РЛС наиболее высока в условиях организованного радиопротиводействия.
Источники информации
1. Импульсная РЛС. Заявка Великобритании N 1514158, кл. G 01 S 9/233 H 4 D, публ. 14.06.1978.
2. Импульсный когерентный допплеровский радар с перестройкой частоты. Патент США N 4338604, кл. G 01 S 13/24, публ. 06.07.1982 (прототип).
3. Управляемый СВЧ-аттенюатор. Авт. cв. СССР N 456330, кл. H 01 P 1/32, H 01 P 1/22, 1975.
4. Справочник по радиолокации, ред. М.Сколник, т. 1. М. Сов. Радио, 1976, с. 421.
5. Справочник по радиолокации, ред. М.Сколник, т. 3. М. Сов. Радио, 1979, с. 19-52, 103-107, 144.
6. Яковлев В. В. Федоров Р.Ф. Стохастические вычислительные машины. Л. Машиностроение, 1974.
7. Родс Д. Р. Введение в моноимпульсную радиолокацию, пер. с англ. М. Сов. Радио, 1960.
8. Патент США, НКИ 343-16, N 3162851, публ. 22.12.1964.
9. Лихарев В. А. Цифровые методы и устройства в радиолокации. М. Сов. Радио, 1983.
10. Ширман Я.Д. Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М. Радио и связь, 1981.
11. The SLQ-32 Story. Electronic Warfare Defence Electronics, May 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2032915C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |


Изобретение относится к области радиолокационной техники и может быть использовано в радиолокационных станциях (РЛС) автономных и командных систем управления, предназначенных для обнаружения сигналов от целей, измерения их координат и автоматического сопровождения по дальности и по угловым координатам при наличии естественных и организованных радиопомех. Технической задачей изобретения является повышение помехозащищенности РЛС как в режиме обнаружения, так и, в особенности, в режиме сопровождения при одновременном повышении точности сопровождения. 1 з.п. ф-лы, 15 ил.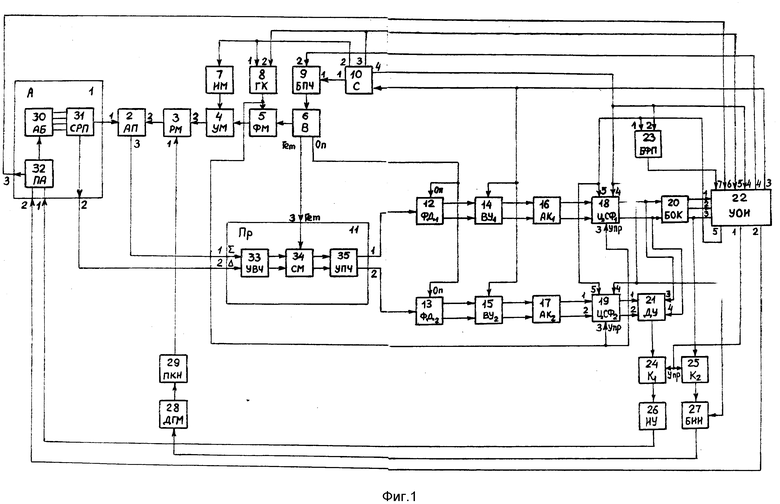
| GB, патент, 1514158, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4338604, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
