Предлагаемое устройство относится к области радиолокации, а более конкретно к автоматическим обнаружителям движущихся целей.
Такое устройство может быть применено в РЛС типа CHAP и ПСНР в случае, когда спектры сигналов, отраженных от целей и помех, в значительной степени перекрываются, а соотношение между мощностями сигналов и помех непрерывно меняется.
Известны устройства селекции движущихся целей, позволяющие автоматически обнаруживать сигналы, отраженные от движущихся целей. Структурная схема такого устройства приведена в [1], стр.369.
Такие устройства включают в себя канал выделения полезного сигнала, состоящий из последовательно включенных фильтра СДЦ, детектора, интегратора, порогового устройства.
К недостаткам указанного устройства следует отнести отсутствие адаптации к изменению уровня коррелированной помехи. В данном устройстве пороговое напряжение выставляется исходя из максимально ожидаемого уровня остатка от коррелированной помехи, что приводит к снижению вероятности обнаружения движущихся целей на фоне коррелированных помех малой интенсивности.
Есть более совершенное устройство, патент США №3465336 по классу G01S 9/42, содержащее канал выделения полезного сигнала, включающий в себя последовательно соединенные полосовой фильтр, детектор, интегратор, пороговое устройство, канал выделения помехи, включающий в себя последовательно соединенные фильтр помехи, детектор, интегратор, выход которого подключен ко второму входу порогового устройства, выход последнего является общим выходом схемы.
К недостаткам указанного устройства относится отсутствие стабилизации ложных тревог, обусловленных внутренними шумами приемника. Необходимость введения стабилизации ложных тревог за счет внутренних шумов приемника объясняется тем, что в режиме обзора земной поверхности при малых углах скольжения луча из-за эффекта затенения имеют место случаи, когда отражения от земной поверхности отсутствуют. При этом в схеме прототипа возможны срабатывания порогового устройства под действием шумов приемника, так как полоса канала выделения полезного сигнала значительно шире полосы канала выделения помехи и, следовательно, мощность шумов, попадающих в канал выделения сигнала, значительно больше мощности шумов, попадающих в канал выделения помехи.
Техническим результатом изобретения является стабилизация ложных тревог, обусловленных внутренними шумами приемника.
Технический результат достигается тем, что в известное устройство, содержащее канал выделения полезного сигнала, включающий в себя последовательно соединенные полосовой фильтр, детектор, интегратор, пороговое устройство, канал выделения помехи, включающий в себя последовательно соединенные фильтр помехи, детектор, интегратор, причем выход порогового устройства является общим выходом схемы, введены аттенюатор, сумматор и канал выделения шума, включающий в себя последовательно соединенные полосовой фильтр, усилитель, детектор, интегратор, схему задержки, причем входы каналов выделения полезного сигнала, помехи и шума объединены и являются входом устройства, а выход канала выделения помехи через аттенюатор подключен к одному из входов сумматора, второй вход которого соединен с выходом канала выделения шума, a выход сумматора подключен ко второму входу порогового устройства.
Введение дополнительного шумового канала и суммирование сформированного порогового напряжения, пропорционального напряжению шума приемника с пороговым напряжением, сформированным в канале выделения помехи, позволяет исключить ложные тревоги при отсутствии коррелированных помех (отражений от земной поверхности) на некоторых участках при обзоре земной поверхности.
На фиг.1 приведена структурная схема одного канала дальности предлагаемого обнаружителя.
Обнаружитель содержит канал выделения полезного сигнала, включающий в себя последовательно соединенные полосовой фильтр 1 сигнала, первый детектор 2, первый фильтр нижних частот 3, пороговый блок 4, канал выделения помехи, включающий в себя последовательно соединенные фильтр помехи 5, второй детектор 6, второй фильтр нижних частот 7, канал выделения шума, включающий в себя последовательно соединенные полосовой фильтр шума 8, третий детектор 9, третий фильтр 10 нижних частот, блок 11 временной задержки. Входы каналов выделения полезного сигнала, помехи и шума объединены и являются общим входом устройства, а выходы каналов помехи и шума подключены ко входам сумматора 12, выход которого соединен со вторым входом порогового блока 4, выход которого является выходом устройства.
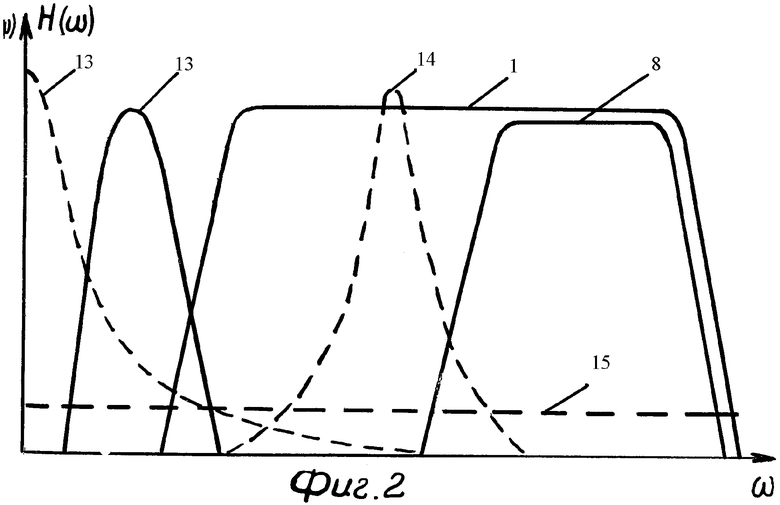
На фиг.2 приведено взаимное расположение амплитудно-частотных характеристик полосового фильтра 1 канала выделения полезного сигнала, фильтра 5 помехи 13, полосового фильтра 8 канала шума, спектра помехи 13, спектра сигнала 14, отраженного от цели, спектра шума 15.
Схема работает следующим образом.
Входной сигнал, представляющий собой аддитивную смесь полезного сигнала, коррелированной помехи и шума приемника, поступает на входы каналов выделения полезного сигнала, помехи и шума.
Полосовой фильтр 1 канала выделения полезного сигнала пропускает частоты, соответствующие диапазону ожидаемых допплеровских частот полезного сигнала. Полосовой фильтр 5 помехи 13 имеет АЧХ 16, смещенную относительно АЧХ 17, фильтра 1 канала выделения полезного сигнала в область нулевых частот. Полосовой фильтр 8 шумового канала имеет АЧХ 18, расположенную внутри полосы пропускания фильтра 1 канала выделения полезного сигнала и отстроенную от переднего среза фильтра 1 таким образом, чтобы энергия остатков от помех 13, попадающих в полосу прозрачности фильтра 8 не превышала энергии шума приемника в этой полосе.
Таким образом, на выходе фильтра 1 сигнального канала напряжения будет обусловлено полезным сигналом 14, шумами 15 и остатком от коррелированной помехи 13. Напряжение на выходе фильтра 5 канала выделения помехи будет в основном определяться помехой 13, а напряжение на выходе фильтра 8 шумового канала - шумом приемника.
В случае отсутствия полезного сигнала 14 и помехи 13 входной сигнал содержит только шумовую компоненту. При этом после детектирования и интегрирования на выходах всех трех каналов появляются сигналы, постоянная компонента которых пропорциональна мощности шума, попавшего в полосу пропускания фильтра соответствующего канала. Коэффициент передачи шумового канала выбирается таким образом, чтобы пороговое напряжение надежно запирало пороговый блок 4, обеспечивая заданный уровень ложных тревог.
При наличии коррелированной помехи 13 напряжение на выходе первого фильтра нижних частот 3 сигнального канала возрастает, одновременно возрастает и пороговое напряжение, так как к шумовой компоненте порогового напряжения на выходе сумматора 12 прибавляется помеховая компонента. Коэффициент передачи канала выделения помехи выбирается также исходя из заданного уровня ложной тревоги.
При появлении полезного сигнала 14 напряжение на выходе первого фильтра нижних частот 3 канала выделения полезного сигнала существенно возрастает и происходит срабатывание порогового блока 4, что сигнализирует о наличии цели, даже в случае, когда допплеровская частота эхо-сигнала от цели попадает в полосу пропускания фильтра 8 канала выделения шума. Напряжение шумового порога поступает на сумматор 12 с задержкой, которая реализуется блоком 11 временной задержки. Наличие задержки предотвращает увеличение порогового напряжения в момент появления сигнала, допплеровская частота которого попадает в полосу пропускания фильтра 8 канала шума. Поэтому обнаружение цели возможно во всем диапазоне допплеровских частот. Длительность задержки выбирается равной или больше времени интегрирования сигналов. Следует отметить, что коэффициенты передачи в каналах выделения помехи и шума существенно отличаются (Kпомехи≈0,3, обеспечивается коэффициентом ослабления аттенюатора, Kшума=3÷4 обеспечивается коэффициентом усиления усилителя) и использование одного канала для стабилизация ложных тревог как по помехам, так и по шуму затруднено.
В отличие от прототипа предлагаемое устройство позволяет стабилизировать ложную тревогу в наземных РЛС обзора земной поверхности, где из-за малых углов скольжения луча диаграммы направленности антенны, имеют место случаи затенения одних участков местности другими, и в некоторых элементах разрешения отражения от земной поверхности отсутствуют. Кроме того, схема адаптивна и к изменению уровня шума приемника.
На предприятии был изготовлен действующий макет цифрового адаптивного обнаружителя, предназначенного для наземной РЛС 1РЛ136, работающий в автоматическом режиме. Стендовые испытания макета показали возможность стабилизации ложной тревоги при отсутствии коррелированных помех и изменении уровня шума приемника РЛС на 10 дБ. При этом не наблюдалось снижение вероятности обнаружения цели. Операция задержки легко осуществляется при цифровой реализации обнаружителя.
Используемая литература
1. Справочник по радиолокации. Том 3, редактор М.Сколник, Москва, "Советское радио", 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖИТЕЛЬ ЭХО-СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1985 |
|
SU1840689A2 |
| ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛА | 2013 |
|
RU2537849C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1991 |
|
RU2106652C1 |
| АДАПТИВНЫЙ ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ЦИФРОВОГО ПАНОРАМНОГО ПРИЕМНИКА МОДУЛЬНОГО ТИПА | 2013 |
|
RU2524551C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ УРОВНЯ ЛОЖНЫХ ТРЕВОГ ПОМЕХОЗАЩИЩЕННОГО РАДИОЛОКАЦИОННОГО ПРИЕМНИКА, РАСПОЛОЖЕННОГО НА ВОЗДУШНЫХ НОСИТЕЛЯХ | 1990 |
|
SU1840162A1 |
| ЦИФРОВОЙ ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ | 2014 |
|
RU2575481C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| ОБНАРУЖИТЕЛЬ РАДИОИМПУЛЬСОВ | 1979 |
|
SU1840949A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
Изобретение относится к области радиотехники. Техническим результатом является улучшение стабилизации вероятности ложных тревог. Устройство содержит последовательно соединенные полосовой фильтр сигнала, первый детектор, первый фильтр нижних частот и пороговый блок, последовательно соединенные фильтр помехи, второй детектор и второй фильтр нижних частот, причем соединенные входы полосового фильтра сигнала и фильтра помехи и выход порогового блока являются входом и выходом обнаружителя эхо-сигналов движущихся целей. Для достижения указанного технического результата устройство снабжено сумматором и соединенными последовательно полосовым фильтром шума, третьим детектором, третьим фильтром нижних частот и блоком временной задержки. Вход полосового фильтра шума соединен с входом обнаружителя эхо-сигналов движущихся целей, выход второго фильтра нижних частот и выход блока временной задержки соединены через сумматор со вторым входом порогового блока. 2 ил.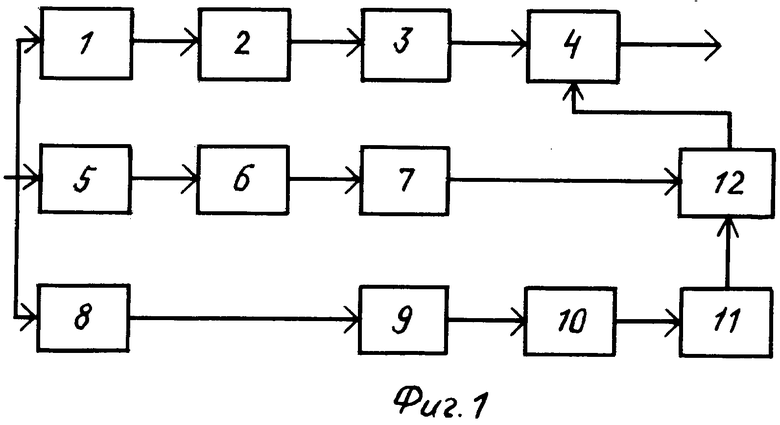
Обнаружитель эхо-сигналов движущихся целей, содержащий последовательно соединенные полосовой фильтр сигнала, первый детектор, первый фильтр нижних частот и пороговый блок, последовательно соединенные фильтр помехи, второй детектор и второй фильтр нижних частот, причем соединенные входы полосового фильтра сигнала и фильтра помехи и выход порогового блока являются входом и выходом обнаружителя эхо-сигналов движущихся целей, отличающийся тем, что, с целью улучшения стабилизации вероятности ложных тревог, введены сумматор и последовательно соединенные полосовой фильтр шума, третий детектор, третий фильтр нижних частот и блок временной задержки, причем вход полосового фильтра шума соединен с входом обнаружителя эхо-сигналов движущихся целей, выход второго фильтра нижних частот и выход блока временной задержки соединены через сумматор со вторым входом порогового блока.
| Патент США №3465336, М | |||
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

