Предлагаемое изобретение относится к области тренажеростроения и может быть использовано в устройствах обучения операторов активных радиолокационных станций /РЛС/ навыкам их эксплуатации в условиях адекватных реальным.
В настоящее время все современные подвижные объекты /например, самолеты/ оснащаются активными РЛС, с помощью которых оператор должен уметь по радиолокационному изображению местности на экране индикатора быстро и точно определять местоположение подвижного носителя РЛС по конфигурации островов, береговой черты материка и объектов /городов, плотин и т.д./ в зоне ″суша″, то есть по топографическим особенностям местности. Наиболее эффективным средством повышения профессиональной подготовки оператора являются устройства обучения /имитаторы и тренажеры/, построенные на базе элементов цифровой техники, где искусственно реализуется физическая модель реальной РЛС с учетом ее взаимодействия с внешней средой. Основное условие пригодности модели /в том числе и модели имитации радиолокационного изображения местности/ для использования ее в устройстве обучения вытекает из требования недопустимости формирования на устройстве обучения ложных навыков восприятия оператором радиолокационного изображения внешней среды, то есть топографических особенностей местности. Выполнение этого требования обеспечивается таким подобием /точности/ имитации физической модели внешней среды и работы реальной РЛС, при котором оператор не будет замечать информационного различия между радиолокационным изображением местности на экране индикатора реальной РЛС и на экране индикатора имитатора, что гарантирует перенос навыков, полученных на устройстве обучения, на реальную РЛС. Основным направлением разработок отечественного и зарубежного тренажеростроения является применение цифровых методов имитации радиолокационного изображения местности. При этом анализ разработок показывает /см. Бичаев Б.П. Морские тренажеры. - Л.: Судостроение, 1986, с. 3-280/, что одними из основных факторов, оказывающих существенное влияние на точность имитации радиолокационного изображения местности, т.е. ее подобие реальному, являются:
- тип используемого индикатора, которым в реальной РЛС обычно является индикатор кругового обзора /ИКО/ с радиально-сканирующей разверткой и электронно-лучевой трубкой /ЭЛТ/, используемой в качестве оконечного устройства;
- возможность оперативного задания /изменения/ масштаба сканирования радиус-вектора развертки индикатора по дальности;
- возможность представления и обработки информации о радиолокационном изображении местности в цифровом виде с учетом различия отражающих свойств местности от топографии местности /″море″ или ″суша″/ с разделением объектов в зоне ″суша″, таких как: город, плотина и т.д., а также островов, бухт и т.д. в зоне ″море″ без ограничения линии береговой черты;
- возможность формирования информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора синхронно со сканированием радиус-вектора развертки индикатора по дальности без задержки предъявления информации по азимуту с учетом привязки момента формирования текущих значений азимута развертки индикатора к обратному ходу развертки индикатора по дальности.
Выполнение перечисленных требований позволит обеспечить такой процесс имитации физической модели внешней среды и работы РЛС, при котором различие между закодированным радиолокационным изображением местности и предъявляемым на экране индикатора имитатора адекватно реальной работе РЛС, т.е. позволяет учесть динамику движения /изменение местоположения/ имитируемого носителя РЛС для каждого хода развертки, при этом формирование и предъявление на экране индикатора радиолокационного изображения местности будет выполнено с шагом квантования по азимуту, равным реальному ψ=360°/2, где: K - разрядность цифровой развертки индикатора реальной РЛС /K=12/ по азимуту, что, в свою очередь, обуславливает возможность формировать и предъявлять на экране линии береговой черты, а также наблюдать объекты /острова, города, плотины и т.д./ протяженностью Δl≥π·r·ψ/180°, где: r - расстояние от местоположения РЛС /центра экрана ИКС/ до объекта или линии береговой черты.
Известен цифровой имитатор радиолокационного изображения местности ″Цифровой генератор визуального вывода″ по пат. США №3801720, МКИ С09/00, состоящий из запоминающего устройства /S1/, вход и выход которого подключены соответственно к выходу и входу логического блока /L/, другие вход и выход которого подключены соответственно к выходу и входу вычислительной машины /C/, другие вход и выход которой подключены соответственно к выходу и входу другого запоминающего устройства /S2/, а третий выход вычислительной машины /C/ подключен к входу формирователя сигналов изображения /DD/ выход которой подключен к входу индикатора /D/.
Цифровой имитатор радиолокационного изображения местности по пат. США №3801720 имитирует на экране ИКО изображение контурной линии береговой черты радиолокационной карты местности, изображенной в исходной /неподвижной/ правой декартовой прямоугольной системе координат. Контурная линия береговой черты /далее по тексту ″береговая черта″/ задается до начала работы фиксированными точками Ni(Xi, Yi), расположенными с интервалами протяженностью 3 /три/ морские мили, которые накапливаются в первом запоминающем устройстве. Две точки одной протяженности образуют ″соединение″. В первом запоминающем устройстве может быть накоплено до i≤1000 таких ″соединений″. Таким образом, общая длина кодируемой линии береговой черты составляет до 3000 морских миль. Каждое ″соединение″ делится на 192 элемента, каждый из которых равен 1/64 морской мили. Во втором запоминающем устройстве для каждого ″соединения″ до начала работы накапливается информация, в виде 2-разрядного параллельного двоичного кода, о направлении каждого элемента относительно предыдущего с учетом условно принятого направления на СЕВЕР /0°/, а именно: коды /0, 0/, /0, 1/, /1, 0/ и /1, 1/, которые характеризуют соответственно направления 0°, 90°, 180° и 270°. Перед началом работы в память вычислительной машины вводятся начальные координаты Хо и Yо, определяющие местоположение носителя РЛС, и параметры траектории движения носителя РЛС /курс и скорость/, которые в процессе работы могут обновляться. С помощью вычислительной машины выполняется преобразование координат всех точек Ni(Xi, Yi) из исходной /неподвижной/ системы координат в новую /подвижную/ декартовую систему координат с началом в точке /Хо, Yо/. Новые координаты точек ″соединений″ хранятся в оперативной памяти вычислительной машины и постоянно обновляются по мере изменения координат Xo и Yo.
Формирование информации и изображения линии береговой черты на экране индикатора выполняется в новой /подвижной/ системе координат, начало которой соответствует положению центра экрана индикатора имитируемого носителя РЛС на заданной местности.
В вычислительной машине для текущего азимута θ развертки индикатора формируется значение угла /tanθ/ и выдается в логический блок. Затем вычислительная машина последовательно, начиная с первого ″соединения″, формирует номер узлового числа jN, значение которого соответствует номеру обрабатываемого ″соединения″, и совместно с информацией о координатах Xi и Yi начала данного ″соединения″ выдает в логический блок. По номеру условного числа jN в логическом блоке формируется начальный адрес, по которому из второго запоминающего устройства выбирается и фиксируется в логическое блоке информация о направлении первого элемента протяженности обрабатываемого ″соединения″. При этом, в логическом блоке согласно информации о направлении элемента выполняется накопление координат Xi, Yi и определяются координаты X+1, Y+1 конца элемента, а также определяется параметр:

для начала и конца элемента с учетом знаков их координат. Если знак параметра Pк для конца элемента соответствует знаку параметра Pк для начала этого же элемента, то принимается решение, что данный элемент не пересекает ход развертки по азимуту θ, а если знаки параметров Pк для начала и конца элемента различны, то данный элемент пересекает ход развертки и координаты данного элемента выдаются из логического блока в вычислительную машину, где определяется дальность точки пересечения с ходом развертки для заданного азимута развертки θ, например, по формуле: 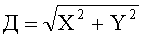
Вышеописанный процесс повторяется для каждого текущего значения азимута θ с дискретом Δθ≥Δt·ω, где: Δt - время, затрачиваемое на обработку элементов всех ″соединений″; ω - угловая скорость сканирования развертки индикатора.
В своей совокупности отметки на экране индикатора повторяют очертание контурной линии береговой черты заданной радиолокационной карты местности с учетом свободного маневрирования подвижного носителя РЛС относительно линии береговой черты. Одним из основных блоков рассмотренного устройства является цифровая вычислительная машина, которая обеспечивает выполнения в интервале времени Δt следующих операций:
- формирование текущих координат точки /Xо, Yо/ положения носителя РЛС на имитируемой местности;
- преобразование координат точек Ni/Xi, Yi/ ″соединений″ линии береговой черты из исходной /неподвижной/ в новую /подвижную/ декартовую систему координат с началом отсчета в точке /Xо, Yо/;
- решение сложного, с точки зрения программной реализации, тригонометрического уравнения /tanθ/;
- формирование номера углового числа jN и управление последовательностью выдачи координат точек ″соединений″ линии береговой черты в логический блок;
- решение сложного, с точки зрения программной реализации, уравнения определения дальности точки пересечения элемента протяженности обрабатываемого ″соединения″ с ходом развертки.
Реализация указанных операций в вычислительной машине обеспечивается с помощью последовательно выполняемых жестких программ с прерыванием, что и обуславливает необходимость ограничения количества точек линии береговой черты до 1000, обработка которых может быть осуществлена в интервале времени Δt, близком к реальному.
Ограничение количества ″соединений″ приводит к ограничению длины имитируемой линии береговой черты.
Существенными недостатками рассмотренного цифрового имитатора радиолокационного изображения местности /″Цифровой генератор визуального вывода″/ по пат. США №3801720 являются:
а/ низкие эксплуатационные характеристики устройства, обусловленные тем, что для имитации координат траектории движения носителя и формирования информации о контурной линии береговой черты требуется организовать решение сложных /в части их технической реализации/ математических и логических уравнений, которое обеспечивается применением трудоемкой в изготовлении, дорогостоящей, сложной в эксплуатации и технической реализации цифровой вычислительной машины. Так, например, вычислительные машины типа СМ-1 и ЕС-1035, на базе которых реализованы аналогичные отечественные тренажеры ″РАДЛОТ-82″ и ″КОЛОКОЛ-БИ″ /см. Радиолокационный тренажер ″РАДЛОТ-82″. Техническое описание, 25.5.14.00.000 Т0. Специализированный тренажер "КОЛОКОЛ-БИ". Техническое описание ГК1.079.008Т0 /требуют для эксплуатации в одну смену технический персонал в составе соответственно 5 и 8 высококвалифицированных специалистов, прошедших специальный курс обучения и получивших удостоверение об успешном окончании курса обучения;
б/ низкая достоверность имитатора радиолокационного изображения местности, так как формируемые на экране индикатора отметки в своей совокупности позволяют повторить только очертание контурной линии береговой черты;
в/ отсутствие возможности имитации радиолокационного изображения местности и его топографических особенностей /лес, низменность, горы, плотины, реки, железные дороги, аэродромы и т.д./, обладающие в реальных условиях различными отражающими свойствами;
г/ ограниченная длина линии береговой черты;
д/ зависимость шага квантования /дискрета Δθ/ по азимуту от времени Δt, которое необходимо затратить на обработку информации обо всех ″соединениях″ линии береговой черты. Увеличение точек береговой черты приводит к необходимости увеличить время Δt, а это неизбежно приведет, при прочих равных условиях, к увеличению шага квантования Δθ;
е/ асинхронность между формированием информации о местности и ее предъявлением на экране индикатора со сканированием радиус-вектора развертки индикатора по дальности, что обуславливает задержку предъявления информации по азимуту на
n≥entier((Tпр+Tобр)/Δt)+1
периодов разверток индикатора по дальности, где: Тпр, Тобр - время прямого и обратного хода развертки индикатора по дальности соответственно.
В своей совокупности перечисленные недостатки рассмотренного цифрового имитатора радиолокационного изображения местности под названием ″Цифровой генератор визуального вывода″ по пат. США №3801790, обуславливают низкую точность имитации радиолокационного изображения местности на экране индикатора имитатора за счет низкой достоверности имитации Физической модели внешней среды и работы РЛС по отношению к реальным.
Наиболее близким по технической сущности к предлагаемому изобретению является цифровой ″Имитатор радиолокационного изображения местности″, состоящий из имитатора движения носителя станции, имитатора антенны, синхронизатора, двух накапливающих сумматоров, двух счетчиков, пяти запоминающих устройств и последовательно соединенных формирователя амплитуды сигналов, формирователя сигналов изображения и индикатора, при этом первый, второй, третий, четвертый и пятый входы формирователя амплитуды сигналов подключены соответственно к выходу третьего запоминающего устройства /ЗУ-3/, первому выходу имитатора антенны, первому выходу синхронизатора, выходу первого счетчика и выходу второго счетчика, второй выход синхронизатора подключен к первому входу второго счетчика и шестому входу формирователя амплитуды сигналов, третий выход синхронизатора подключен к второму входу второго счетчика и второму входу индикатора, третий вход которого подключен к второму выходу имитатора антенны, третий выход которого подключен к входу четвертого запоминающего устройства /ЗУ-4/ и входу пятого запоминающего устройства /ЗУ-5/, четвертый выход синхронизатора подключен к первому входу первого накапливающего сумматора, первому входу второго накапливающего сумматора и первому входу первого счетчика, четвертый выход имитатора антенны подключен к второму входу первого накапливающего сумматора, второму входу второго накапливающего сумматора, второму входу первого счетчика и входу синхронизатора, третий, четвертый входы, первый, второй и третий выходы первого накапливающего сумматора подключены соответственно к первому выходу имитатора движения носителя станции, выходу ЗУ-4, первому входу первого запоминающего устройства /ЗУ-1/, первому входу второго запоминающего устройства /ЗУ-2/ и первому входу ЗУ-3, третий, четвертый входы, первый, второй и третий выходы второго накапливающего сумматора подключены соответственно к второму выходу имитатора движения носителя станции, выходу ЗУ-5, второму входу ЗУ-1, второму входу ЗУ-2 и второму входу ЗУ-3, третий вход которого подключен к выходу ЗУ-2, третий вход которого подключен к выходу ЗУ-1.
При этом существенное влияние оказывает временная последовательность приемов и операций имитации радиолокационного изображения местности, совокупность которых должна проводиться в определенной последовательности и осуществляется с помощью имитатора антенны, первого и второго накапливающих сумматоров, синхронизатора и Формирователя амплитуды сигнала.
Имитатор движения носителя станции выполнен в виде задатчика курса, запоминающего устройства косинусов /ЗУ-косинусов/, запоминающего устройства синусов /ЗУ-синусов/, блока задания начальных координат, задатчика скорости, третьего и четвертого накапливающих сумматоров, при этом выход задатчика курса подключен к входу ЗУ-косинусов и входу ЗУ-синусов, выход задатчика скорости подключен к первым входам третьего и четвертого накапливающих сумматоров, вторые входы которых объединены и подключены и первому выходу блока задания начальных координат, второй и третий выходы которого подключены соответственно к третьим входам третьего и четвертого накапливающих сумматоров, четвертые входы которых подключены соответственно к выходу ЗУ-косинусов и выходу ЗУ-синусов, а выходы третьего и четвертого накапливающих сумматоров являются соответственно вторым и первым выходами имитатора.
Имитатор антенны выполнен в виде последовательно соединенных генератора меток пеленга, счетчика меток пеленга, цифроаналогового преобразователя и блока отработки пеленга, а также из формирователя одиночного импульса /ФОИ/, вход которого соединен с вторым выходом счетчика меток пеленга и является первым выходом имитатора антенны, а выход блока отработки пеленга, третий выход счетчика меток пеленга и выход ФОИ являются соответственно вторым, третьим и четвертым выходами имитатора антенны.
Формирователь амплитуды сигналов содержит первый, второй и третий коммутаторы, элемент ″НЕ″, первое и второе оперативное запоминающее устройство /ОЗУ-1 и ОЗУ-2/ и регистр, при этом: первый вход первого коммутатора и первый вход ОЗУ-1 соединены с входом элемента ″НЕ″ и являются вторым входом формирователя амплитуды сигналов, второй и третий входы первого коммутатора соединены соответственно с вторым и третьим входом второго коммутатора и являются соответственно третьим и четвертым входами формирователя амплитуды сигналов, четвертый вход первого коммутатора соединен с четвертым входом второго коммутатора и первым входом регистра и является шестым входом формирователя амплитуды сигналов, пятый вход первого коммутатора соединен с пятым входом второго коммутатора и является пятым входом формирователя амплитуды сигналов, выход элемента ″НЕ″ подключен к первым входам второго и третьего коммутаторов и ОЗУ-2, первый и второй выходы первого коммутатора подключены соответственно к второму и третьему входам ОЗУ-1, первый и второй выходы второго коммутатора подключены соответственно к второму и третьему входам ОЗУ-2, четвертый вход ОЗУ-1 соединен с четвертым входом ОЗУ-2 и является первым входом формирователя амплитуды сигналов, выходы ОЗУ-1 и ОЗУ-2 подключены соответственно к второму и третьему входам третьего коммутатора, выход которого подключен ко второму входу регистра, выход которого является выходом формирователя амплитуды сигналов.
Каждый из накапливающих сумматоров состоит из последовательно соединенных: коммутатора, регистра и сумматора, а также из элемента ″ИЛИ″, первый вход и второй вход, соединенный с первым входом коммутатора, которого являются соответственно первым и вторым входами накапливающего сумматора, а выход элемента ИЛИ подключен к второму входу регистра, при этом второй вход коммутатора представляет собой /1…К, К+1…КМ/-разрядную шину, у которой /1…К/ разряды подключены к корпусу, а /К+1…К+М/-разряды объединены в общую шину и являются третьим входом накапливающего сумматора, второй вход сумматора представляет собой /1…К,К+1…К+М/-разрядную шину, у которой /К+1…К+М/-разряды подключены к корпусу, а /1…К/-разряды совместно с третьим управляющим входом сумматора объединены условно в /0, 1, …, К/-разрядную шину и являются четвертым входом накапливающего сумматора, выход сумматора представляет собой /1…К,К+1…К+М/-разрядную шину, у которой /1…К,К+1…К+М/-разряды подключены к третьему входу коммутатора, а /К+1…К+М/-разряды являются выходом накапливающего сумматора.
Для организации требуемой последовательности операций по опросу первого, второго и третьего запоминающих устройств выход первого и второго накапливающих сумматоров, представляющих собой /К+1…К+М/-разрядную шину, условно разделен на три линии связи, каждая из которых является соответственно первым, вторым и третьим выходом для первого и второго накапливающих сумматоров, при этом:
- первый выход условно объединяет старшие /K+7…K+M/-разряды;
- второй выход условно объединяет средние /K+4, K+5, K+6/-разряды;
- третий выход условно объединяет младшие /K+1, K+2, K+3/-разряды.
В описании рассмотрена техническая реализация имитатора радиолокационного изображения местности для акватории площадью 2048×2048 км c минимальным дискретом Д=0,250 км, что в свою очередь определяет количество разрядов M=13. При цене младшего разряда M-разрядного параллельного двоичного кода на выходе накапливающего сумматора равного M/К+1/=M/Р1/=ΔД=0,250 км максимальное значение кода равно 0,250·213=2048 км.
Синхронизатор содержит генератор импульсов, распределитель импульсов, ключ, счетчик и последовательно соединенные датчик масштаба, блок сравнения и триггер, второй вход которого соединен с первым входом счетчика и является входом синхронизатора, при этом: выход генератора импульсов подключен к входу распределителя сигналов и является вторым выходом синхронизатора, первый выход распределителя сигналов является третьим выходом синхронизатора, второй и третий выходы распределителя сигналов подключены соответственно к первому и второму входам ключа, первый выход которого является первым выходом синхронизатора, второй выход ключа соединен с вторым входом счетчика и является четвертым выходом синхронизатора, выход триггера подключен к третьему управляющему входу ключа, а выход сметчика подключен к второму входу блока сравнения.
Реализация составных частей каждого из рассмотренных блоков, /а именно: имитатора движения носителя станции, имитатора антенны, формирователя амплитуды сигналов, накапливающих сумматоров и синхронизатора/ достаточно подробно описана в материалах с указанием характеристик и параметров входных /выходных/ сигналов каждого из блоков и требований по организации линий связи /одно- или многоразрядная шина/, обеспечивающих передачу сигналов /кодовой информации/ между блоками.
Имитатор радиолокационного изображения местности работает следующим образом.
В момент включения электропитания устройства /такие как: триггера, счетчики, регистры и оперативные запоминающие устройства автоматически устанавливаются в исходное /нулевое/ состояние. Устройство электропитания, автоматической установки исходного состояния и их связи условно не показаны.
Имитатор движения носителя станции предназначен для имитации движения объекта носителя имитирующей РЛС на плоскости заданной карты местности /акватории или района игры/ в правой декартовой прямоугольной системе координат. Траектория движения носителя РЛС характеризуется изменением во времени координат точки Н/Xо, Yо/, с учетом задаваемых значений курса Кн и скорости Сн носителя, относительно начала координат, которым является точка 0/0, 0/, совмещенная с левым нижним краем заданной карты местности.
Информация о численном значении координат точки Н вырабатывается в виде /М=13/ - и разрядного параллельного двоичного кода координаты X, координаты Y и осуществляется с помощью блоков /задатчика курса, задатчика скорости, блока задания начальных координат, ЗУ-косинусов, ЗУ-синусов и двух накапливающих сумматоров/, входящих в состав имитатора движения носителя станции и осуществляется следующим образом.
С помощью задатчика курса задается в виде К-разрядного параллельного двоичного кода Кн численное значение курса объекта-носителя имитируемой РЛС, которое поступает по К-разрядной линии связи на вход ЗУ-косинусов и вход ЗУ-синусов.
С помощью блока задания начальных координат до начала работы задается исходное /начальное/ положение координат X и Y точки Н. Значения координат вырабатываются в виде 13-и разрядных параллельных двоичных кодов Xn и Yn. С блока задания начальных координат коды Xn и Yn поступают соответственно на третьи входы накапливающих сумматоров. До начала работы в ЗУ-косинусов записывается информация об изменении численного значения координаты Y точки Н в виде массива двоичных параллельных кодов Yр, численное значение которых характеризуют расстояние Др=0,25 км проходимое носителем за время Ти со скоростью Сн с учетом заданного курса Кн, а именно:

где: Ти - время, за которое имитируемый носитель станции проходит расстояние Др со скоростью Сн;
Кн, Сн - курс и скорость имитируемого носителя.
Значения Yр представляют собой /0, 1…К/ - разрядные параллельные двоичные коды при этом:
- для положительных значений Yр /при 0°≤Кн≤90° и 270°≤Кн≤360°/ значение 0-разряда кода характеризуется сигналом логического ″0″ /Лог. 0/, а для отрицательных значений /при остальных значениях КН/ - сигналом Лог. 1;
- разряды 1…K кода Yр характеризуют абсолютное численное значение кода - Yр в двоичном параллельном коде.
До начала работы в ЗУ-синусов записывается информация об изменении численного значения координаты Х точки Н в виде массива двоичных параллельных кодов Xр, численные значения которых характеризуют расстояния Др=0,25 км, проходимое носителем за время Ти со скоростью Сн с учетом заданного курса Кн, именно:

Значения Хр представляют собой /0,1…K/-разрядные параллельные двоичные коды, при этом:
- для положительных значений Хр /при 0°≤Кн≤180°/ значение 0-разряда кода Хр характеризуется сигналом Лог. 0, а для отрицательных значений /при остальных значениях Кн/ - сигналом Лог. 1;
- разряды 1…K кода Хр характеризуют абсолютное численное значение кода Хр в двоичном параллельном коде.
При обращении к ЗУ-косинусов и ЗУ-синусов происходит считывание информации без разрушения в ячейках памяти, т.е. выполняется преобразование кода адреса, поступающего в виде кода Кн с выхода задатчика курса на их входы, в код считываемого числа:
- код Yр для ЗУ-косинусов;
- код Хр для ЗУ-синусов.
Коды Yр и Хр поступают соответственно на четвертые входы накапливающих сумматоров имитатора движения носителя станции.
С помощью задатчика скорости формируется непрерывная последовательность тактовых импульсов, период повторения Ти=Др/Сн которых характеризует расстояние Др=0,25 км, которое должен пройти носитель станции с заданной скоростью Сн. При значении Др=0,25 км=const значение Ти характеризует значение скорости Сн.
Таким образом, путем изменения частоты следования импульсов обеспечивается задание скорости движения носителя.
Формирование текущих координат Хо и Yо точки Н выполняется непосредственно с помощью накапливающих сумматоров, каждый из которых состоит из элемента ″ИЛИ″ и последовательно соединенных /1…,K+1,…,K+M/-разрядных коммутатора, регистра и сумматора /1…K,K+1,…,K+M/-выходы которого подключены к третьему входу коммутатора, а /K+1…K+M/ выходы являются выходом накапливающего сумматора.
Рассмотрим формирование несущей координаты Хо. На время действия импульсного сигнала ″Пуск″, формируемого блоком задания начальных координат и поступающего с его третьего выхода на вторые входы накапливающих сумматоров, а следовательно, на первый вход коммутатора, а также через элемент ″ИЛИ″ на второй вход регистра, через коммутатор на первый вход регистра поступает и записывается в регистр информация о численном значении кода Хн, которая поступает на второй вход коммутатора и представляет собой код, состоящий из младшей /1…K/-разрядной части, равной 0 /нулю/, и старшей /K+1…K+M/-разрядной части, равной коду Хн. С выхода регистра информация поступает на первый вход сумматора, на другой вход которого поступает /1…K,K+1…K+M/-разрядный код, состоящий из младшей /1…K/-разрядной части, равной /1…K/ разрядам кода Хр и старшей /K+1…K+M/-разрядной части, равной 0 /нулю/, при этом /0-разряд/ кода Хр поступает на третий управляющий вход сумматора /вычитателя и устанавливает режим работы /Лог. 0 - режим суммирования, Лог. 1 - режим вычитания/. Сумматор обеспечивает выполнение операции алгебраического суммирования /K+M/-разрядных кодов, поступающих на его первый и второй входы. Результат выполненной операции вырабатывается на выходе сумматора/вычитателя в виде /K+M/-разрядного кода, при этом: /1…K,K+1,,…K+M/-разряды подключены к третьему входу коммутатора и при отсутствии сигнала ПУСК подключаются к первому входу регистра, а состояние старших /K+1…K+M/-разрядов определяет численное значение /М=13/-разрядного кода Хо. Старшие разряды объединены в кодовую шину, которая является выходом накапливающей сумматора. По каждому тактовому импульсу Ти задатчика скорости, поступающего через элемент ИЛИ на второй вход регистра, результат выполненной алгебраической операции суммирования поступает с выхода сумматора через коммутатор в регистр и снова суммируется с учетом знака кода Хр. То есть выполняется операция накопления текущей координаты Хo. Аналогичным образом с помощью другого накапливающего сумматора имитатора движения носителя станции выполняется формирование координаты Yо точки Н. Информация, характеризующая текущее местоположение точки Н/Xо, Yо/, поступает в виде /М=13/-разрядных параллельных двоичных кодов Хо и Yо соответственно на третьи входы первого и второго накапливающих сумматоров имитатора радиолокационного изображения местности.
Имитатор антенны, с помощью входящих в его состав блоков /генератора меток пеленга, счетчика меток пеленга, цифроаналогового преобразователя /ЦАП/, блока обработки пеленга и формирователя одиночного импульса /ФОИ/, работает в автономном режиме и обеспечивает управление работой других блоков имитатора радиолокационного изображения местности, которое осуществляется следующим образом.
Генератор меток пеленга формирует непрерывную последовательность импульсных сигналов ИМП.Па, период следования Тс которых задается исходя из требуемой скорости вращения (V, град/с) радиус-вектора развертки индикатора по азимуту /пеленгу/. Сигналы ИМП.Па с выхода генератора меток пеленга поступают на счетный вход счетчика меток пеленга. Счетчик меток пеленга формирует 12-разрядный параллельный двоичный код Па. Формирование кода Па выполняется путем счета сигналов ИМП.Па, период следования которых задается равным Тс=360°/212·V/. Значение кода Па определяет текущий пеленг /азимут/ главного лепестка диаграммы направленности имитируемой системы РЛС и отсчитывается по часовой стрелке от условно принятого направления на СЕВЕР /0°/, совмещенного с осью Y. Разряды Р1…Р12 кода Па с первого выхода счетчика меток пеленга поступают на вход ЦАП, на выходе которого вырабатывается аналоговый сигнал СИГН.Па, уровень /амплитуда/ которого пропорционален ″весу″ кода Па, присутствующему на входе ЦАП. Сменяющиеся значения кода-Па обуславливают изменения амплитуды сигнала СИГН.Па, поступающего с выхода ЦАП на вход блока отработки пеленга, где преобразуется в угол поворота вала Па, который является выходом блока отработки пеленга и механически соединен с третьим входом индикатора. С помощью блока отработки пеленга выполняется отслеживание вала Па за изменяющимся значением сигнала СИГН.Па. Информация разрядов Р4…Р12 кода Па /т.е. без младших разрядов Р1…Р3/ поступает с третьего выхода счетчика метки пеленга на вход ЗУ-4 и вход ЗУ-5 и является адресом считывания для информации, хранящейся в этих запоминающих устройствах. Разряд Р4 кода Па с второго выхода счетчика меток пеленга поступает на второй вход формирователя амплитуды сигналов и вход ФОИ. По каждому изменению состояния разряда Р4 кода Па на выходе ФОИ Формируется короткий /0,4±0,1 мкс/ импульсный сигнал ИМП.НУ /импульс начальной установки/, который с выхода ФОИ поступает на вторые входы первого и второго накапливающих сумматоров, вход синхронизатора и вход первого счетчика имитатора радиолокационного изображения местности.
Синхронизатор управляет последовательностью выполнения операций блоков имитатора радиолокационного изображения местности путем Формирования следующих сигналов:
ИМП.ТИ1 - управление темпом накопления /формирования/ информации о текущих значениях координат точки М/X, Y/, скользящей по радиус-вектору развертки индикатора от точки Н/Xo, Yo/ в направлении азимута Па;
ИМП.ТИ2 - момент формирования которого свидетельствует о том, что информация о радиолокационном изображении местности для текущего /мгновенного/ положения точки М/X, Y/ сформирована и может быть принята на хранение в формирователь амплитуды сигналов;
ИМП.ТИ3 - управление темпом считывания информации о радиолокационном изображении местности, хранящейся в формирователе амплитуды сигналов с последующим предъявлением ее в темпе сканирования развертки индикатора по дальности;
ИМП.Од - импульс нуль-дальности, момент формирования которого определяет начало прямого хода радиус-вектора развертки индикатора.
На вход синхронизатора с четвертого выхода имитатора антенны поступает импульсный сигнал ИМП.НУ.
Формирование выходных сигналов синхронизатора выполняется в определенной временной последовательности с помощью блоков /генератора импульсов, распределителя сигналов, ключа, счетчика, датчика масштаба, схемы сравнения и триггера, входящих в состав синхронизатора и осуществляется следующем образом.
Генератор импульсов формирует непрерывную последовательности тактовых сигналов в виде меандра, период следования которых Тг=2Др/С≅1,66(6) мкс, где Др=0,25 км, С - скорость света. Значение Др определяет минимальный дискрет дальности, с которым должна быть закодирована и обеспечено предъявление отображения на экране индикатора информация о радиолокационном изображении местности. В свою очередь, для обеспечения имитации радиолокационного изображения местности на экране индикатора устройства обучения близкого к реальному, значение Др должно удовлетворять условию Др≤d, где: d - разрешающая способность экрана индикатора. Тактовые импульсы генератора импульсов являются также сигналами ИМП.ТИ3 и поступают с второго выхода синхронизатора на первый /счетный/ вход второго счетчика и шестой вход формирователя амплитуды сигналов. Сигналы ИМП.ТИ3 поступают также с выхода генератора импульсов на управляющий вход распределителя сигналов, на первом, втором и третьем выходе которого формируются сигналы ИМП.Од, ИМП.ТИ2 и ИМП.ТИ1, при этом:
- сигналы ИМП.Од с первого выхода распределителя сигналов, являющегося третьим выходом синхронизатора, поступают на второй /установки в нуль/ вход второго счетчика и второй вход /запуска развертки/ индикатора;
- сигналы ИМП.ТИ2 и ИМП.ТИ1 с второго и третьего выходов распределителя сигналов поступают соответственно на первый и второй вход ключа.
Период повторения этих сигналов определяет темп формирования информации о радиолокационном изображении местности.
Формирование этих сигналов на выходе ключа, а следовательно, и на выходе синхронизатора выполняется в стробирующем сигнале СТРОБ-ИКО, формируемом на выходе триггера и поступающим на третий /управляющий/ вход ключа.
Формирование сигнала СТРОБ-ИКО выполняется асинхронно с формированием сигнала ИМП.Од и осуществляется от импульсного сигнала ИМП.НУ следующим образом.
Сигнал ИМП.НУ, вырабатываемый в имитаторе антенны в момент изменения 4-го разряда кода Па, поступает на первый /установки в нуль/ вход счетчика и второй /установки в состояние Лог. 1/ вход триггера, входящих в состав синхронизатора, а также на второй /установки в нуль/ первого счетчика имитатора радиолокационного изображения местности.
Счетчик устанавливается в состояние ″нуль″, а триггер - в состояние СТРОБ-ИКО ≡ Лог. 1, при этом ключ открывается и, с этого момента времени и до окончания сигнала СТРОБ-ИКО, сигналы ИМП. ТИ1, ИМП.ТИ2 формируются на четвертом и первом выходах синхронизатора. Сигналы ИМП.ТИ1 поступают также на счетный вход счетчика синхронизатора и на первый /счетный/ вход первого счетчика имитатора радиолокационного изображения местности. Таким образом, эти счетчики работают синхронно. На их выходах формируется текущее значение длины радиус-вектора развертки, для которого должна быть сформирована информация о радиолокационном изображении местности с учетом мгновенного /текущего/ значения азимута радиус-вектора развертки, характеризующегося численным значением кода Па /разряды Р4…Р12/.
С выхода первого счетчика имитатора радиолокационного изображения местности значение информации о длине радиус-вектора развертки поступает в виде параллельного двоичного кода 3n /адреса записи/ на четвертый вход формирователя амплитуды сигнала. Информация с выхода счетчика синхронизатора поступает на второй вход схемы сравнения синхронизатора, где сравнивается с информацией о длительности прямого хода развертки индикатора, значение которого поступает с выхода датчика масштаба в виде параллельного М-разрядного двоичного кода Мико на первый вход схемы сравнения. В момент равенства кодовой информации, поступающей на первый и второй входы схемы сравнения, на выходе схемы сравнения вырабатывается импульсный сигнал ИМП.Ср, который поступает на первый /установки в нуль/ вход триггера и устанавливает его в состояние СТРОБ.ИКО. ≡ Лог. 0, при этом ключ закрывается и формирование сигналов ИМП.ТИ1, ИМП.ТИ2 на выходах синхронизатора прекращается.
Следует особо отметить, что формирование сигнала сравнения ИМП. Ср должно быть осуществлено до момента начала формирования очередного сигнала ИМП.НУ, т.е. обязательным условием работоспособности имитатора радиолокационного изображения местности /прототипа/ является выполнение следующего требования:

где: Тимп.ну - период повторения сигналов ИМП. НУ;
Тс - период изменения младшего /первого/ разряда кода Па;
τстроб.ико - длительность сигнала СТРОБ ИКО;
Тимп.Ти1 - период следования сигналов ИМП.ТИ1, характеризующий темп формирования информации о радиолокационном изображении местности;
Мико - масштаб прямого хода развертки индикатора;
Др - дискретность формирования и предъявления на индикаторе информации о радиолокационном изображении местности по координате дальности.
Необходимость обязательного выполнения уравнения /3/ обусловила структуру построения рассматриваемого имитатора радиолокационного изображения местности и потребовала разделения во времени процесса формирования информации о радиолокационном изображении местности и процесса предъявления данной информации на экране индикатора.
Рассмотрим сначала последовательность операций по организации и выполнения процесса формирования информации о радиолокационном изображении местности, состоящего из следующих операций:
- операция формирования координат X и Y точки М скользящей по радиус-вектору развертки;
- операция считывания данных из запоминающих устройств ЗУ-1, ЗУ-2, ЗУ-3;
- операции ввода /накопления/ данных в память формирования амплитуды сигналов.
Формирование информации выполняется путем имитации движения точки М по радиус-вектору развертки через равные дискретные интервалы по дальности Др=0,25 км из точки Н/Xо, Yо/ в направлении текущего значения кода Па /разряды Р4…Р12/, что определяет численное значение дискрета по азимуту, равное
Δψ=ψ·23=(360°/212)·23≅42,16′
Первый и второй накапливающие сумматоры обеспечивают формирование значения текущих координат соответственно X и Y точки М в темпе поступления на их первые входы сигналов ИМП.ТИ1. Изменяющиеся значения координат X и Y в своей совокупности определяют мгновенное положение точки М на линии радиус-вектора развертки, для которой должна быть сформирована информация о радиолокационном изображении местности.
Формирование кодовой информации с помощью первого и второго накапливающих сумматоров выполняется аналогично, рассмотренным ранее, накапливающих сумматоров, которые применены в имитаторе движения носителя станции. Для организации связи с другими блоками, выход каждого из накапливающих сумматоров представляет собой три кодовые шины, каждая из которых является соответственно первым, вторым и третьим выходом для первого и второго накапливающих сумматоров, при этом: первый, второй и третий выходы объединяют соответственно /K+7…K+13/-, /K+4…K+6/- и /K+1…K+3/-разряды кодовой /1…K,K+1…K+13/-разрядной информации, формируемой на выходе сумматора, входящего в состав каждого из накапливающих сумматоров.
Управление первым и вторым накапливающими сумматорами выполняется сигналами ИМП.НУ и ИМП.ТИ1, формируемыми соответственно имитатором антенны и синхронизатором, при этом:
- импульсным сигналом ИМП.НУ выполняется установка в исходное /начальное/ состояние путем занесения в регистр накапливающего сумматора координат Xо и Yо точки Н/Xо, Yо/, которые поступают соответственно с первого и второго выходов имитатора движения носителя станции на третьи входы соответственно первого и второго накапливающих сумматоров;
- в сумматоре первого и второго накапливающих сумматоров формируется /1…K+13/-разрядный параллельный двоичный код соответствующий алгебраической сумме информации, поступающей в виде кодов Хо и ΔХ на входы сумматора для первого накапливающего сумматора, и кодов Yо и ΔY - для второго, накапливающего сумматора с учетом требований по формированию младшей и старшей частей кодов;
- передним фронтом каждого импульсного сигнала ИМП.ТИ1 реализуется операция накопления информации на выходе сумматора, которая выполняется путем алгебраического суммирования выходной информации сумматора с информацией, поступающей на четвертые входы первого и второго накапливающих сумматоров.
Формируемая информация на выходе сумматора представляет собой параллельный двоичный /K+13/-разрядный код, состоящий из двух частей, а именно: младшей части, объединяющей /1…K/-разряды, и старшей части, объединяющей /K+1…K+13/-разряды. Цена младшего разряда младшей части кодовой информации на выходе сумматора устанавливается равной Др/2K, где: Др - интервал движения точки М по линии развертки радиус-вектора, K - разрядность младшей части кодовой информации на выходе сумматора. С учетом заданного масштаба индикатора, равного Мико, может быть определена максимальная ошибка формирования значений координат точки М за счет операции накопления, а именно:

Из формулы /4/ видно, что изменение значения ошибки ξ может быть выполнено, при прочих равных условиях, за счет увеличения разрядности младшей части.
Общее количество разрядов кодовой информации, которую необходимо обратить с помощью сумматора, оказывает существенное влияние на быстродействие накапливающего сумматора, которое относительно переднего фронта сигнала ИМП.ТИ1 может быть оценено по следующей формуле:

где: tр - время задержки, требуемое для прохождения информации с выхода коммутатора через регистр на первый вход сумматора;
t1 - время выполнения алгебраической операции суммирования над двумя разрядами чисел, представленных в виде двоичных кодов;
К, M - разрядность младшей и старшей /М=13/ частей информации о результате выполненной операции;
t2 - время задержки, требуемой для прохождения сигнала ИМП.ТИ1 через элемент ИЛИ.
Время срабатывания накапливающего сумматора tс определяет в конечном итоге общее время, которое требуется для выполнения первой операции формирования информации по одному из (Мико/Др) положений точки М, ″скользящей″ по радиус-вектору развертки в направлении, заданном разрядами Р4…Р12 кода Па.
Информацию, формируемую на первом, втором и третьем выходах первого накапливающего сумматора условно обозначим КОД-Х1, КОД-Х2 и КОД-Х3, а на тех же выходах второго накапливающего сумматора - КОД-Y1, КОД-Y2 и КОД-Y3 соответственно.
Численное значение приращений координат X и Y точки М, ″скользящей″ по линии радиус-вектора развертки с темпом, равным периоду следования сигналов ИМП.ТИ1, в направлении, соответствующем разрядам Р4…Р12 кода Па, загружается в четвертое /ЗУ-4/ и пятое /ЗУ-5/ запоминающие устройства до начала работы, при этом:
- в ЗУ-4 содержится информация о численном значении изменения координаты Х положения точки М для пеленга, численное значение которого определяется информацией в разрядах Р4…Р12 кода Па, и определяется по формуле

- в ЗУ-5 содержится информация о численном значении изменения координаты Y положения точки М для пеленга, численное значение которого определяется информацией в разрядах Р4…Р12 кода Па, и определяется по формуле:

Каждый из кодов ΔX и ΔY представляет собой /0, 1…K/-разрядные параллельные двоичные коды, у которых 0-разряд содержит информацию о знаке, а /1…K/-разряды содержат информацию об абсолютном численном значении указанной информации. Адресом считывания информации для каждого из ЗУ-4 и ЗУ-5 являются разряды Р4…Р12 кода Па, при этом считывание информации из ЗУ-4 и ЗУ-5 выполняется без разрушения в ячейке памяти и поступает в виде кодов ΔX и ΔY соответственно на четвертые входы первого и второго накапливающих сумматоров.
Второй операцией процесса формирования информации о радиолокационном изображении местности является операция организации формирования адреса считывания и непосредственно выполнение последовательного считывания информации из запоминающих устройств ЗУ-1, ЗУ-2 и ЗУ-3. Именно в этих запоминающих устройствах хранится информация о радиолокационном изображении местности. Загрузка информации в запоминающие устройства осуществляется в виде двоичных кодов до начала работы. При обращении к этим запоминающим устройствам происходит считывание информации без разрушения в ячейке памяти реализуемого запоминающего устройства, т.е. выполняется преобразование кода адреса в код считываемого числа.
Код адреса для ЗУ-1 состоит из двух частей, а именно:
- первая часть, характеризующая старшие разряды кода адреса и соответствующая /Р7…Р13/-разрядом кода текущего значения координаты X точки М, который в виде 7-разрядного параллельного двоичного кода КОД-Х1 поступает с первого выхода первого накапливающего сумматора на первый вход ЗУ-1;
- вторая часть, характеризующая младшие разряды кода адреса и соответствующая /Р7…Р13/-разрядам кода текущего значения координаторы Y точки М, который в виде 7-разрядного параллельного двоичного кода КОД-Y1 поступает с первого выхода второго накапливающего сумматора на второй вход ЗУ-1.
Код адреса ЗУ-2 состоит из трех частей, а именно:
- первая часть, характеризующая старшие разряды и соответствующая /Р1…Р8/-разрядам информации, считываемой из ЗУ-1, которая в виде параллельного двоичного кода КОД ЗУ-1 поступает с выхода ЗУ-1 на третий вход ЗУ-2;
- вторая и третья части, характеризующие соответственно средние и младшие разряды кода адреса и соответствующие /Р4…Р6/-разрядам кодов текущих значений координат X и Y точки М, которые в виде 3-разрядных параллельных двоичных кодов КОД-X2 и КОД-Y2 поступают соответственно на первый и второй входы ЗУ-2.
Код адреса ЗУ-3 состоит из трех частей, а именно:
- первая часть, характеризующая старшие разряды и соответствующая /Р1…Р8/-разрядам информации, считываемой из ЗУ-2, которая в виде параллельного двоичного кода КОД ЗУ-2 поступает с выхода ЗУ-2 на третий вход ЗУ-3;
- вторая и третья части, характеризующие соответственно средние и младшие разряды кода адреса и соответствующие /Р1…Р3/-разрядам кодов текущих значений координат X и Y точки М, которые в виде трехразрядных параллельных двоичных кодов КОД-X3 и КОД-Y3 поступают соответственно на первый и второй входы ЗУ-3.
Радиолокационная карта местности изображается на сетке в прямоугольной правой декартовой системе координат и загружается в ЗУ-1, ЗУ-2 и ЗУ-3 до начала работы в виде информации, закодированной двоичными параллельными кодами. Карта моделируется с помощью ″стандартных блоков″ общего назначения в количестве 28=256 различных типов, каждым размером 16×16 км, которые используются для составления /моделирования/ всей карты и хранятся в виде двоичных параллельных кодах в запоминающем устройстве ЗУ-1. Местоположение каждого из "стандартных блоков" на моделируемой карте характеризуется кодами КОД-X1 и КОД-Y1, каждый из которых представляет собой 7-разрядный параллельный двоичный код, что в совокупности составляет 27×27=128×128=16384 ″стандартных блока″, представляющих собой квадраты 16×16 км.
Таким образом, общий размер кодируемой акватории равен 16 км × 128 = 2048 км.
Каждый из 256-и типов ″стандартных блоков″ размером 16×16 км состоит из других ″стандартных блоков″, т.е. квадратов размером 2×2 км, и в закодированном виде хранится в памяти запоминающего устройства ЗУ-2. Таким образом, каждый из ″стандартных блоков″ размером 16×16 км состоит из 23×23=64 - ″стандартных блоков″ размером 2×2 км, в свою очередь, каждый из 256 типов ″стандартных блоков″ размером 2×2 км моделируется из 28=256 различных типов ″стандартных блоков″, каждый из которых состоит из квадратов размером 0,25×0,25 км и в закодированном виде хранится в памяти запоминающего устройства ЗУ-3. Таким образом, каждый из ″стандартных блоков″ размером 2×2 км состоит из 23×23=64 ″стандартных блоков″ размером 0,25×0,25 км. А каждый из квадратов размером 0,25×0,25 км, хранящийся в ЗУ-3, содержит информацию об отражающей способности местности, представленной в виде 3-разрядного параллельного двоичного кода, и характеризует уровень отраженного сигнала.
Согласно кодовой информации /КОД-X1 и КОД-Y1/ выполняется считывание информации из ЗУ-1, выходная информация /КОД ЗУ-1/ которого совместно с кодовой информацией /КОД-X2 и КОД-Y2/ является адресом для ЗУ-2, а его выходная информация /КОД ЗУ2/ совместно с кодовой информацией /КОД-X3 и КОД-Y3/ являются, в свою очередь, адресом для ЗУ-3, выходная информация которого характеризует уровень отраженного сигнала в точке М/X, Y/ в виде кода КОД ЗУ-3 поступает с выхода запоминающего устройства ЗУ-3 на первый вход формирователя амплитуды сигнала.
Время считывания информации о радиолокационном изображении местности с запоминающих устройств ЗУ-1, ЗУ-2 и ЗУ-3 может быть оценено по формуле:
tсч≅3·tзу,
где: tзу - время задержки считывания из одного запоминающего устройства.
Третья операция по выполнению процесса формирования информации о радиолокационном изображении местности предусматривает накопление данных об уровне сигнала для каждого из местоположений точки М, ″скользящей″ по радиус-вектору развертки от точки Н/Xо, Yо/ в направлении /т.е. по азимуту/, равном /Р4…Р12/-разрядам кода Па с дискретом по дальности, равном Др=0,250 км на расстоянии Mико.
Информация о радиолокационном изображении местности представляет собой код КОД ЗУ-3, формируемый на выходе третьего запоминающего устройства ЗУ-3, и поступающей с его выхода на четвертые входы первого и второго оперативных запоминающих устройств ОЗУ-1 и ОЗУ-2, режим работы которых /запись или считывание/ задается состоянием четвертого разряда Р4-кода Па, поступающего с первого выхода имитатора антенн на первые входы ОЗУ-1 и первого коммутатора, и через элемент ″НЕ″ на первые входы второго коммутатора, третьего коммутатора и ОЗУ-2,при этом:
- если четвертый разряд кода Па равен Р4 = Лог. 1, то ОЗУ-1 устанавливается в режиме ″запись″, а ОЗУ-2 - в режиме ″считывание″;
- если четвертый разряд кода Па равен Р4 = Лог. 0, то ОЗУ-1 устанавливается в режиме ″считывание″, а ОЗУ-2 - в режиме ″запись″.
Адрес, по которому осуществляется запись кода КОД ЗУ-3 в одно из оперативных запоминающих устройств, формируется с помощью первого счетчика и в виде параллельного двоичного кода КОД 3n поступает с его выхода на третьи входы первого и второго коммутатора. Формирование кода КОД 3n в первом счетчике осуществляется путем счета импульсных сигналов ИМП.ТИ1, формируемых синхронизатором и поступающих с его четвертого выхода на первый /счетный/ вход первого счетчика, при этом начало счета первого счетчика задается импульсным сигналом начальной установки ИМП.НУ, формируемом имитатором антенны и поступающим с его четвертого выхода на второй /установки в нуль/ вход первого счетчика. Состояние разрядов кодовой информации на выходе первого счетчика характеризует численное значение расстояния Δd, на которое точка М/X, Y/ удалена от точки Н/Xо, Yо/:

Момент записи кода КОД ЗУ-3 в одно из оперативных запоминающих устройств определяется импульсными сигналами ИМП.ТИ2, формируемыми синхронизатором и поступающими с его первого выхода на вторые входы первого и второго коммутатора, входящего в состав формирователя амплитуды сигнала. Если четвертый разряд кода Па равен Р4 = Лог. 1, то код КОД 3n и импульсные сигналы ИМП.ТИ2 поступают через первый коммутатор на второй /адресный/ и третий /управляющий/ входы первого оперативного запоминающего устройства ОЗУ-1, иначе /при Р4 = Лог. 0/ - через второй коммутатор на аналогичные входы второго оперативного запоминающего устройства ОЗУ-2.
Таким образом, путем последовательного выполнения первой, второй и третьей операций выполняется процесс формирования информации о радиолокационном изображении местности для каждого из местоположений точки М, скользящей по радиус-вектору развертки через дискретные интервалы по дальности Др=0,250 км из точки Н/Xо, Yо/, соответствующей местоположению центра индикатора на закодированной акватории, в направлении, соответствующем каждому из текущих разрядов Р4…Р12 кода Па.
Далее рассмотрим процесс предъявления /отображения/ информации о радиолокационном изображении местности на экране электронно-лучевой трубки индикатора, который заключается в считывании информации с одного из оперативных запоминающих устройств формирователя амплитуды сигналов кода КОД ЗУ-3 в темпе изменения развертки индикатора по дальности с последующим преобразованием этого кода в видеосигнал, амплитуда которого соответствует численному значению информации об амплитуде имитируемого ″отраженного″ сигнала от местности, закодированной в виде параллельного двоичного кода КОД ЗУ-3.
Так как предполагается, что развертка индикатора равномерно сканирует по азимуту и дальности, то сначала выполняется формирование /накопление/ информации о радиолокационном изображении местности для развертки по азимуту равном Р4…Р12 кода Па, а затем через дискрет азимута
Δψ=360°/212·23=360°/29=42,16′
происходит считывание информации из оперативного запоминающего устройства формирования амплитуды сигналов.
Ранее отмечалось, что выбор оперативного запоминающего устройства /ОЗУ-1 или ОЗУ-2/, с которого считывается информация определяется состоянием разряда Р4 кода Па. Следует особо отметить, что изменение режима работы /считывание или запись/ указанных оперативных запоминающих устройств выполняется в момент изменения состояния разряда Р4 кода Па и осуществляется асинхронно с моментом формирования синхронизатором сигналов ИМП.Од.
Адрес, по которому осуществляется считывание информации из оперативного запоминающего устройства, формируется с помощью второго счетчика и в виде параллельного двоичного кода КОД Сч поступает с его выхода через соответствующий /первый, если Р4 кода Па равен Лог. 0 или второй - если Р4 = Лог. 1/ коммутатор на третий вход соответствующего оперативного запоминающего устройства /ОЗУ-1 или ОЗУ-2/.
Формирование кода КОД Сч во втором счетчике осуществляется путем счета импульсных сигналов ИМП.ТИ3, формируемых синхронизатором и поступающих с его второго выхода на первый /счетный вход/ второго счетчика, при этом начало счета второго счетчика задается импульсным сигналом ИМП.Од, формируемым синхронизатором и поступающим с его третьего выхода на второй /установки в нуль/ выход второго счетчика и второй /запуска развертки/ вход индикатора.
Состояние разрядов кодовой информации на выходе второго счетчика характеризует численное значение длины радиус-вектора развертки индикатора, при этом:
- если четвертый разряд кода Па равен Р4 = Лог. 0, то код КОД Сч и импульсные сигналы ИМП. ТИЗ поступают через первый коммутатор на второй и третий входы первого запоминающего устройства ОЗУ-1, а считываемая с этого ОЗУ-1 информация поступает через третий коммутатор на второй /информационный/ вход регистра формирователя амплитуды сигнала и по спаду сигнала ИМП.ТИ3, поступающему на первый /управляющий/ вход регистра, перезаписывается в регистр;
- если четвертый разряд кода Па равен Р4 = Лог. 1, то аналогичная операция считывания и записи информации в регистр выполняется в формирователе амплитуды сигналов из оперативного запоминающего устройства ОЗУ-2.
Считываемая из оперативного запоминающего устройства информация представляет импульсный /стробируемый сигналами ИМП.ТИ3/ параллельный двоичный код КОД ЗУ-3 и преобразуется с помощью регистра в потенциальный параллельный двоичный код-РЛИМ. С выхода регистра, являющегося выходом формирователя амплитуды сигналов, информация поступает на вход формирователя сигналов изображения, где код РЛИМ преобразуется в видеосигнал СИГН. РЛИМ, амплитуда которого соответствует численному значению кода-РЛИМ. С выхода формирователя сигналов изображения видеосигналы СИГН.РЛИМ поступают на первый вход индикатора для отображения.
Изменение радиус-вектора /луча/ развертки индикатора по дальности синхронизировано с измерением кода КОД Сч, формируемого вторым счетчиком, и обеспечивается сигналами ИМП.Од, который обнуляет счетчик и являются импульсами запуска развертки индикатора, а сканирование развертки индикатора по азимуту синхронизировано с изменением кода Па и обеспечивается имитатором антенны, второй выход которого механически связан с третьим входом индикатора.
Техническая реализация каждого из блоков обеспечена применением общеизвестных схем, элементов и устройств, при этом в материалах достаточно подробно приведены остальные технические подробности в части организации и построения каждой из линии связи между блоками устройства, а также параметры и характеристики сигналов /кодов/ передаваемых по линии связи.
Существенным недостатком является недостаточная точность имитации радиолокационного изображения местности на экране индикатора, обусловленная тем, что формирование информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора выполняется асинхронно со сканированием радиус-вектора развертки индикатора по дальности, так как:
а/ формирование информации о местности с шагом квантования по азимуту Δφ=360°/29, что превышает реальный шаг квантования ψ=360°/212 в Δψ/ψ=8 раз;
б/ предъявление информации о местности на экране индикатора задерживается на время Δtр=Δψ/ω и выполняется через n=entier((Tпр+Tобр)/Δtр+1 разверток индикатора по дальности и смещено по азимуту на угол Δψ;
в/ отсутствует привязка момента выдачи информации о местности на экране индикатора к сканированию развертки индикатора по дальности. Выдача сформированной информации о местности на экране индикатора определяется моментом изменения разряда Р4 кода Па и выполняется асинхронно с моментом начала и конца прямого хода развертки на дальности. Из-за этого будет наблюдаться ″сбой″ в работе устройства, заключающийся в ″передергивании″ на экране индикатора изображения при обновлении информации на прямом ходе радиус-вектора развертки индикатора по дальности.
Целью изобретения является повышение точности имитации радиолокационного изображения местности на экране индикатора за счет Формирования информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора синхронно со сканированием радиус-вектора развертки индикатора по дальности в темпе изменения длины развертки на дискрет 0,250 км без задержки предъявления информации по азимуту с учетом привязки момента формирования текущего значения азимута развертки индикатора к обратному ходу развертки индикатора по дальности.
Поставленная цель достигается тем, что в ″Имитатор радиолокационного изображения местности″, содержащий имитатор движения носителя станции синхронизатор, первый и второй сумматоры, первый, второй и третий регистры, первый и второй счетчики, первое, второе, третье, четвертое и пятое запоминающие устройства, последовательно соединенные счетчик меток пеленга, цифроаналоговый преобразователь и блок отработки азимута, а также последовательно соединенные формирователь сигналов изображения и индикатор, при этом первый и третий выходы синхронизатора подключены соответственно к первому входу третьего регистра и второму входу индикатора, третий вход которого подключен к выходу блока отработки азимута, выход третьего регистра подключен к входу формирователя сигналов изображения, выход первого запоминающего устройства подключен к третьему входу второго запоминающего устройства, выход которого подключен к третьему входу третьего запоминающего устройства, выходы первого и второго регистров подключены соответственно к первым входам первого и второго сумматоров, вторые входы которых подключены соответственно к первым выходам четвертого и пятого запоминающих устройств, введены первый, второй, третий и четвертый элементы ″И-НЕ″, первый и второй элементы ″НЕ″, при этом выходы первого и второго элементов ″И-НЕ″ подключены соответственно к первым входам первого и второго счетчиков, первые выходы первого и второго сумматоров подключены соответственно к первым входам первого и второго регистров, четвертый выход синхронизатора, подключен к вторым входам первого и второго регистров и первым входам первого, второго, третьего и четвертого элементов ″И-НЕ″, второй выход первого сумматора подключен к вторым входам первого и третьего элементов ″И-НЕ″, второй выход второго сумматора подключен к вторым входам второго и четвертого элементов ″И-НЕ″, второй выход четвертого запоминающего устройства подключен к третьему входу первого элемента ″И-НЕ″ и через первый элемент ″НЕ″ к третьему входу третьего элемента ″И-НЕ″, второй выход пятого запоминающего устройства подключен к третьему входу второго элемента ″И-НЕ″ и через второй элемент ″НЕ″ к третьему входу четвертого элемента ″И-НЕ″, выходы первого и второго элементов ″И-НЕ″ подключены соответственно к первым входам первого и второго счетчиков, второй выход синхронизатора подключен к третьим входам первого и второго регистров, вторым входам первого и второго счетчиков и к входу счетчика меток пеленга, выход которого подключен к входам четвертого и пятого запоминающих устройств, выходы третьего и четвертого элементов ″И-НЕ″ подключены соответственно к третьим входам первого и второго счетчиков, первый, второй и третий выходы первого счетчика подключены соответственно к первым входам первого, второго и третьего запоминающих устройств, первый, второй и третий выходы второго счетчика подключены соответственно к вторым входам первого, второго и третьего запоминающих устройств, первый, второй выходы имитатора движения носителя станции подключены соответственно к четвертым входам первого и второго счетчиков, а выход третьего запоминающего устройства подключен к второму входу третьего регистра.
При этом в синхронизатор, содержащий генератор импульсов, счетчик меток дальности, ключ, формирователь одиночного импульса /ФОИ/, выход которого является третьим выходом синхронизатора, и последовательно соединенные датчик масштаба развертки, блок сравнения и триггер, выход которого подключен к второму входу ключа, выход которого является первым выходом синхронизатора, а выход счетчика меток дальности подключен к второму входу блока сравнения, введены второй блок сравнения, элемент ″И″, выход которого является четвертым выходом синхронизатора, элемент ″ИЛИ-НЕ″, выход которого подключен к первому входу ключа, и делитель, вход которого подключен к выходу генератора импульсов и первым входам элементов ″И″ и ″ИЛИ-НЕ″, при этом: второй выход датчика масштаба развертки и выход счетчика меток дальности подключен соответственно к первому и второму входам второго блока сравнения, выход которого подключен к второму входу триггера и первому входу счетчика меток дальности, выход делителя подключен к вторым выходам счетчика меток дальности, элемента ″ИЛИ-НЕ″ и элемента ″И″, третий вход которого соединен с входом ФОИ и подключен к выходу триггера.
Такое построение устройства позволяет:
а/ значительно сократить время, требуемое на выполнение операции формирования координат X и Y точки М, скользящей по радиус-вектору развертки индикатора с дискретом 0,250 км по дальности, для каждого из местоположения точки М, для которой нормируется информация о радиолокационном изображении местности.
Это обеспечивается с помощью вновь введенных: первого, второго, третьего и четвертого элементов ″И-НЕ″, первого и второго элементов ″НЕ″ и их связей, а также изменением режимов работы первого и второго счетчиков и их связей, которые в своей совокупности позволяют организовать параллельное /во времени/ формирование информации каждой из координат X и Y точки М. При этом сначала выполняется нормирование старшей /значащей/ части кодов координат X и Y, а затем - формирование младшей /дополнительной/ части и формирование нового /или подтверждение прежнего/ значения признака ″переноса″ на вторых выходах первого и второго сумматоров, который будет использован для формирования старшей части следующих текущих координат X и Y точки М, сдвинутой по радиус-вектору на дискрет 0,250 км. Такое разделение во времени формирования старшей и младшей частей кодов координат X и Y точки М позволяет совместить во времени операцию формирования младшей части кода этих координат с последовательно выполняемыми операциями считывания данных из первого, второго и третьего запоминающих устройств и записи информации в третий регистр. При прочих равных условиях, это обеспечивает возможность выполнить операции: формирование координат X и Y точки М, считывание данных из первого, второго и третьего запоминающих устройств и запись информации в третий регистр в темпе изменения длины радиус-вектора развертки индикатора на дискрет 0,250 км по дальности. А это приводит к тому, что формирование информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора будет выполняться синхронно со сканированием радиус-вектора развертки индикатора по дальности без задержки предъявления информации по азимуту;
б/ учесть динамику движения носителя РЛС, характеризующуюся изменением текущих координат местоположения имитируемого носителя РЛС для каждого хода развертки. Это обеспечивается подключением второго выхода синхронизатора к входу счетчика метки пеленга, вторым входом первого и второго счетчиков и третьим входом первого и второго регистров, а также подключением выхода счетчика меток пеленга к входам четвертого и пятого запоминающих устройств, что позволяет привязать момент формирования /обновления/ азимута радиус-вектора развертки индикатора к обратному ходу развертки индикатора по дальности и обеспечить задание /ввод в сумматоры и счетчики/ информации, соответствующей текущему местоположению носителя РЛС/, т.е. центра экрана индикатора/ на закодированной местности для каждого хода развертки индикатора по дальности.
Все это позволит значительно повысить точность имитации радиолокационного изображения местности на экране индикатора, т.е. добиться адекватной имитации физической модели работы РЛС, размещенной на подвижном авиационном носителе, с внешней средой по отношению к реальным и тем самым повысить степень выучки операторов навыкам эксплуатации активных РЛС.
На чертеже фиг. 1 представлена блок-схема предлагаемого имитатора радиолокационного изобретения местности.
На чертеже фиг. 2 представлена блок-схема синхронизатора.
Предлагаемый имитатор радиолокационного изображения местности /см. фиг. 1/ содержит имитатор движения носителя станции /1/, синхронизатор /2/, первый /3/ и второй /4/ сумматоры, первый /5/, второй /6/ и третий /7/ регистры, первый /8/ и второй /9/ счетчики, первое ЗУ-1 /10/, второе ЗУ-2 /11/, третье ЗУ-3 /12/, четвертое ЗУ-4 /13/ и пятое ЗУ-5 /14/ запоминающие устройства, последовательно соединенные счетчик меток пеленга /15/, цифро-аналоговый преобразователь /ЦАП/ /16/ и блок отработки азимута /17/, последовательно соединенные формирователь сигналов изображения /18/ и индикатор /19/, первый /20/, второй /21/, третий /22/ и четвертый /23/ элементы ″И-НЕ″, первый /24/ и второй /25/ элементы ″НЕ″, при этом, первый, второй и третий выходы счетчика /8/ подключены соответственно к первым входам ЗУ-1 /10/, ЗУ-2 /11/ и ЗУ-3 /12/, первый, второй и третий выходы счетчика /9/ подключены соответственно к вторым входам ЗУ-1 /10/, ЗУ-2 /11/ и ЗУ-3 /12/, выход ЗУ-1 /10/ подключен к третьему входу ЗУ-2 /11/, выход которого подключен к третьему входу ЗУ-3 /12/, первый выход синхронизатора /2/ подключен к первому входу регистра /7/, второй вход и выход которого подключены соответственно к выходу ЗУ-3 /12/ и входу формирователя сигналов изображения /18/, второй выход синхронизатора /2/ подключен к третьим входам регистров /5/ и /6/, вторым входам счетчиков /8/ и /9/ и к входу счетчика меток пеленга /15/, выход которого подключен к входам ЗУ-4 /13/ и ЗУ-5 /14/, третий выход синхронизатора /2/ подключен к второму входу индикатора /19/, третий вход которого подключен к выходу блока отработки азимута /17/, четвертым выход синхронизатора /4/ подключен к вторым входам регистров /5/ и /6/ и к первым входам элементов ″И-НЕ″ /20/, /21/, /22/, и /23/, первые выходы сумматоров /3/ и /4/ подключены соответственно к первым входам регистров /5/ и /6/, выходы которых подключены соответственно к первым входам сумматоров /3/ и /4/, вторые входы которых подключены соответственно к первым выходам ЗУ-4 /13/ и ЗУ-5 /14/, входы которых подключены к выходу счетчика меток пеленга /15/, второй выход сумматора /3/ подключен к вторым входам элементов ″И-НЕ″ /20/ и /22/, второй выход сумматора /4/ подключен к вторым входам элементов ″И-НЕ″ /21/ и /23/, второй выход ЗУ-4 /13/ подключен к третьему входу элемента ″И-НЕ″ /20/ и через элемент ″НЕ″ /24/ к третьему входу элемента ″И-НЕ″ /22/, второй выход ЗУ-5 /14/ подключен к третьему входу элемента ″И-НЕ″ /21/ и через элемент ″НЕ″ /25/ к третьему входу элемента ″И-НЕ″ /23/, выходы элементов ″И-НЕ″ /20/ и /22/ подключены соответственно к первому и третьему входам счетчика /8/, выходы элементов ″И-НЕ″ /21/ и /23/ подключены соответственно к первому и третьему входам счетчика /9/, а первый и второй выходы имитатора движения носителя станции /1/ подключены соответственно к четвертым входам счетчиков /8/ и /9/.
1. Имитатор движения носителя станции /1/ в части построения и функционирования аналогичен такому же блоку прототипа, техническая реализация составных частей которого и связей, а также характеристика выходных сигналов 13-разрядных параллельных двоичных кодов Xо и Yо с ценой младшего разряда Р1=0,250 км, формируемых соответственно на первом и втором выходах.
2. Синхронизатор /2/ предназначен для формирования управляющих тактовых импульсных сигналов, которые определяют последовательность и темп работы блоков предлагаемого устройства.
Синхронизатор /2/ содержит /см. чертеж фиг. 2/ генератор импульсов /26/, счетчик меток дальности /27/, ключ /28/, формирователь одиночного импульса /ФОИ/ /29/, датчик масштаба развертки /30/, первый /31/ и второй /32/ блоки сравнения, триггер /33/, элемент ″И″ /34/, элемент ″ИЛИ-НЕ″ /35/ и делитель /36/, вход которого подключен к выходу генератора импульсов /25/ и первым входам элементов ″И″ /34/ и ″ИЛИ-НЕ″ /35/, при этом: выход элемента ″ИЛИ-НЕ″ /35/ подключен к первому входу ключа /28/, выход которого является первым выходом синхронизатора /2/, первый и второй выходы датчика масштаба развертки /30/ подключены соответственно к первым входам блоков сравнения /31/ и /32/, вторые входы которых соединены между собой и подключены к выходу счетчика меток дальности /27/, выход блока сравнения /31/ подключен к первому входу триггера /33/, выход блока сравнения /32/ подключен ко второму входу триггера /33/ и первому входу счетчика меток дальности /27/, выход делителя /36/ подключен к вторым входам счетчика меток дальности /27/, элемента ″И″ /34/ и элемента ″ИЛИ-НЕ″ /35/, выход триггера /33/ подключен к второму входу ключа /28/, третьему входу элемента ″И″ /34/, входу ФОИ /29/ и является вторым выходом синхронизатора /2/, а выход ФОИ /29/ и выход элемента ″И″ /34/ являются соответственно третьим и четвертым выводами синхронизатора /2/.
Генератор импульсов /26/ предназначен для формирования непрерывной последовательности импульсных сигналов с частотой 1,2 МГц и может быть реализован по схеме генератора с кварцевой стабилизацией частоты /см. В помощь радиолюбителю: Сборник, вып. 76, - М: ДОСААФ, 1982, стр. 45-56/, при этом клемма ВЫХОД реализуемого генератора является выходом генератора импульсов.
Счетчик меток дальности /27/ предназначен для формирования кода-Дико, численное значение которого характеризует дальность положения точки М на развертке индикатора, для которого в данный момент времени формируется информация о радиолокационном изображении местности. Счетчик /27/ может быть реализован по схеме /n=13/-разрядного суммирующего асинхронного счетчика /см. Браммер Ю.А. Импульсная техника, М: Высшая школа, 1985, с. 266-269/, при этом вход ″Сброс в 0″ /обнуление/ и вход ″Т″ /счетный вход/ реализованного сметчика являются соответственно первым и вторым входами счетчика /27/, а ″Q1…Q13″ выходы - объединены в кодовую шину и являются выходом счетчика меток дальности /27/. Цена младшего разряда кода-Дико задается равной Р1=0,250 км.
Ключ /28/ предназначен для стробирования импульсных сигналов, формируемых на выходе элемента ″ИЛИ-НЕ″ /35/, импульсными сигналами, формируемыми на выходе триггера /33/. Ключ /28/ может быть реализован по схеме двухвходного элемента И /см. Браммер Ю.А. Импульсная техника, М: Высшая школа, 1985, с. 112-113/, при этом: вход Uвх1, вход Uвх2, и выход реализуемого элемента И является соответственно первым входом, вторым входом и выходом ключа /28/.
ФОИ - /29/ предназначен для формирования импульсов нуль-дальности ИМП.Од, характеризующих момент начала прямого хода радиус-вектора развертки индикатора /19/, и может быть реализован с помощью схемы формирователя импульсов по фронту и спаду входного сигнала /см. ОСТ 11.340.902-78, Микросхемы интегральные полупроводниковые, Руководство по применению, с. 131/. при этом вход ″X″ и выход ″Y″ реализуемой схемы являются соответственно входом и выходом ФОИ /29/. На выходе ФОИ /29/ вырабатывается короткий импульсный сигнал ИМП.Од длительностью 0,4÷1,0 мкс.
Датчик масштаба развертки /30/ предназначен для задания длительности прямого хода развертки и длительности полного хода развертки, состоящей из прямого и обратного хода развертки по дальности.
Датчик масштаба развертки /30/ состоит из двух одинаковых по технической сущности автономных датчиков, каждый из которых может быть реализован по схеме накопителя с применением интегральных микросхем совместно с клавиатурными переключателями /см. OCT.11.340.902-78. Микросхемы импульсные полупроводниковые. Руководство по применению, с. 288-295/. Значение требуемого кода Дпр. и Дполн. задается нажатием /отжатием/ клавиши ″S″ реализуемого накопителя, при этом на выходах накопителя, каждый из которых соответствует одной из клавиш, вырабатывается сигнал Лог 1 /Лог 0/. Выходы каждого из реализуемых накопителей объединены 13-и разрядные кодовые шины и являются соответственно первым и вторым выходами датчика масштаба развертки /30/. Цена младшего разряда /Р1/ указанных ранее кодов задается 0,250 км.
Блоки сравнения /31/ и /32/ аналогичны по функциональному назначению и могут быть технически просто реализованы по схеме реализации функции H1 /X, Y/ /см. Электронные цифровые вычислительные машины, под ред. К.Г. Самофалова - Киев: Вища школа, 1976, с. 159-161/, при этом входы ″X 0,1… i=12″ и ″Y 0,1…i=12″ объединены в 13-разрядные кодовые шины и являются соответственно первым и вторым входами, а выход ″H1″ является выходом для каждого из блоков сравнения /31/ и /32/. В момент равенства кодов, поступающих на первый и второй входы блоков сравнения /31/ и /32/, на их выходах вырабатываются соответственно:
- импульс конца прямого хода /импульс ИКР/ развертки индикатора по дальности вырабатывается на выходе блока сравнения /35/ и устанавливает триггер /33/ в ″нулевое″ состояние;
- импульс конца полного хода /импульс ИНР/ развертки индикатора по дальности вырабатывается на выходе блока сравнения /32/ и устанавливает триггер /33/ в ″единичное″ состояние, а счетчик меток дальности /27/ в ″нулевое″ состояние.
Триггер /33/ предназначен для нормирования стробирующего сигнала, эквивалентного прямому ходу развертки индикатора по дальности. Триггер /33/ может быть реализован по схеме триггера с раздельными входами /см. Бузуков Ю.А. Принципы построения цифровых вычислительных машин, - Киев: Техника, 1972, с. 78/ при этом входы qо, q1 и выход Q реализуемого триггера являются соответственно первым входом, вторым входом и выходом триггера /33/.
Элемент ″И″ /34/ и элемент ″ИЛИ-НЕ″ /35/ могут быть технически просто реализованы на базе общеизвестных 3- и 2-входовых элементов ″И″ и ″ИЛИ-НЕ″ соответственно /см. Мальцева Л.А. Основы цифровой техники, M.; Радио и связь, 1987, с. 20-55/, позволяющих реализовать следующие логические операции:
Y=X1·X2·X3 - элемент ″И″ /34/,
где: X1, Х2, Х3 - входные сигналы элементов;
Y - выходной сигнал элементов.
Делитель /36/ предназначен для формирования последовательности тактовых импульсных сигналов, частота следования которых в 2 /два/ раза меньше, чем частота тактовых импульсных сигналов, вырабатываемых генератором импульсов /26/. Делитель /36/ может быть реализован по схеме асинхронного двоичного счетчика на триггерах - JK или триггера - D /см. Данилов Р.В. Применение интегральных микросхем в электронной вычислительной технике: Справочник, М.: Радио и связь, 1987. с. 96-100/, при этом счетный вход ″с″ и выход ″Q1″ реализуемого счетчика являются соответственно входом и выходом делителя /36/.
3. Сумматор /3/ и сумматор /4/ в части построения и функционирования представляют собой идентичные устройства и технически просто могут быть реализованы по схеме сумматора /вычитателя двух чисел, представленных параллельными кодами/ см. Дж. Хилбурн. Микро-ЭВМ и микропроцессоры - М.: Мир, 1979, с. 80-82/, при этом:
- для реализации операции суммирования необходимо на вход СЛОЖИТЬ/ВЫЧЕСТЬ реализуемого сумматора/вычитателя двух чисел подать сигнал Лог. 1, т.е. подключить к источнику питания этой схемы;
- входы ″А0…An-1″, входы ″В0…Вn-1″ и выходы реализуемого сумматора/вычитателя двух чисел объединены в кодовые шины и являются соответственно первым входом, вторым входом и первым выходом для каждого из сумматоров /3/ и /4/, а выход ″ПЕРЕПОЛНЕНИЕ″ реализуемого сумматора/вычитателя двух чисел является вторым выходом для каждого из сумматоров /3/ и /4/.
4. Регистр /5/ и регистр /6/ в части построения и функционирования представляет собой идентичные устройства и технически просто могут быть реализованы по схеме параллельного регистра, выполняющего функции начальной установки /т.е. принудительного обнуления/, записи и хранения параллельного кода /см. ОСТ 11.340.902-78. Микросхемы интегральные полупроводниковые. Руководство по применению, с. 251-254/, при этом:
- входы ″D1…Dn″ и выходы ″Q1…Qn″ реализуемой схемы регистра объединены в кодовые шины и являются соответственно первым входом и выходом для каждого из регистров /5/ и /6/;
- стробирующий вход записи информации ″с″ реализуемой схемы регистра является вторым входом для каждого из регистров /5/ и /6/;
- входы обнуления ″R″ ячеек реализуемой схемы регистра соединены между собой и являются третьим входом для каждого из регистров /5/ и /6/.
5. Регистр /7/ может быть реализован по схеме параллельного регистра, выполняющего функции записи и хранения параллельного кода аналогично регистру /5/, при этом:
- вход обнуления ″R″ ячеек реализуемой схемы регистра не используется и может быть подключен к источнику питания схемы;
- стробирующий вход записи информации ″с″ реализуемой схемы регистра является первым входом регистра /7/;
- входы ″D1…Dn″ и выходы ″Q1…Qn″ реализуемой схемы регистра объединены в кодовые шины и являются соответственно вторым входом и выходом регистра /7/.
6. Счетчик /8/ и счетчик /9/ в части построения и функционирования представляют собой идентичные устройства и технически просто могут быть реализованы на основе микросхем типа ИЕ-7 по схеме двоичного реверсивного 13-разрядного счетчика с предустановкой /см. Мальцева Л.А. Основы цифровой техники, - М: Радио и связь, 1987 г., с 40-47/, при этом:
- наращивание разрядности выполняется путем подключения выходов Р1 и Р2 предыдущей микросхемы к соответствующим входам С1 и С2 следующей микросхемы. Для реализации 13-разрядного счетчика достаточно применить 4 микросхемы типа ″ИЕ7″;
- вход ″С1″ /сложения/ первой микросхемы реализуемой схемы двоичного счетчика является первым входом для каждого из счетчиков /8/ и /9/;
- вход ″S″ /запись/ информации, присутствующей на входах ″D″ каждой из четырех микросхем реализуемой схемы двоичного реверсирования счетчика соединены между собой и являются вторым входом для каждого из счетчиков /8/ и /9/;
- вход ″С2″ /вычитание/ первой микросхемы реализуемой схемы двоичного реверсивного счетчика является третьим выходом для каждого из счетчиков /8/ и /9/;
- информационные выходы реализуемой схемы 13-разрядного двоичного реверсивного счетчика условно разделены на 3 /три/ кодовые шины.
Первая кодовая шина объединяет разряды Р7…Р13 и является первым выходом, вторая - разряды Р4…Р6 и является вторым выходом третья - разряды Р1…Р3 и является третьим выходом для каждого из счетчиков /8/ и /9/;
- входы ″D1…D13″ реализуемой схемы двоичного реверсивного счетчика объединены в 13-и разрядную кодовую шину, которая является четвертым входом для каждого из счетчиков /8/ и /9/;
- вход ″R″ /начальной установки счетчика в нуль/ не используется и может быть подключен к корпусу схемы.
7. Запоминающие устройства ЗУ-1 /10/, ЗУ-2 /11/, ЗУ-3 /12/, ЗУ-4 /13/ и ЗУ-5 /14/ в части назначения, построения, состава и объема информации, организации и структуры линий связи для каждого их входов и выходов, а также функционирования представляют собой аналогичные устройства таким же блоком /первому, второму, третьему, четвертому и пятому запоминающим устройствам/ прототипа, техническая реализация которых достаточно подробно приведена в материальных описаниях прототипа.
Особенностью построения запоминающих устройств ЗУ-4 /13/ и ЗУ-5 /14/ является то, что знаковый разряд кодовой информации, хранимой в этих запоминающих устройствах, выделен в отдельную линию связи, которая является вторым выходом для каждого из запоминающих устройств ЗУ-4 /13/ и ЗУ-5 /14/.
8. Счетчик меток пеленга /15/, ЦАП /16/, блок отработки азимута /17/, формирователь сигналов изображения /18/ и индикатор /12/ в части назначения, построения, состава, характеристик входных и выходных сигналов, организации и структуры линий связи для каждого из входов и выходов, а также функционирования, представляют собой аналогичные устройства таким же блокам прототипа, и может быть обеспечено применением общеизвестных схем, устройств и элементов цифровой и аналоговой техники.
9. Элементы ″И-НЕ″ /20/, /21/, /22/, /23/ предназначены для реализации простейшей логической операции конъюнкции над тремя логическими сигналами: 
10. Элементы ″НЕ″ /24/ и /25/ предназначены для реализации простейшей логической операции инвертирования: 
Предлагаемый имитатор радиолокационного изображения местности работает следующим образом.
В момент включения электропитания реализуемые устройства /такие как триггеры, счетчики и регистры/ автоматически устанавливаются в исходное /нулевое/ состояние. Устройства электропитания, автоматической установки исходного состояния и их связи условно не показаны.
Имитатор движения носителя станции /1/ формирует код-Xо и код-Yо, численные значения которых характеризуют местоположение имитируемого носителя РЛС на закодированной акватории местности с учетом его исходного /начального/ положения, направления /курса/ и скорости движения, при этом код-Xо и код-Yо представляют собой 13-и разрядные параллельные двоичные коды, формируемые соответственно на первом и втором выходах блока /1/ и по линии связи, представляющей собой кодовую шину, поступают соответственно на четвертые входы блока /8/ и блока /9/ соответственно. Процесс формирования кодов Xо и Yо полностью соответствует формированию аналогичной информации, выполняемой с помощью аналогичного имитатора движения носителя станции, и достаточно подробно описан в материалах настоящего описания при рассмотрении построения и формирования сигналов аналогичного устройства, выбранного в качестве прототипа.
Синхронизатор /3/ управляет последовательностью и темпом работы блоков устройства путем формирования следующих сигналов:
а/ ИМП.ТИ-1 - обеспечивающих управление темпом накопления /формирования/ информации о текущих значениях координат точки М/X, Y/, ″скользящей″ по радиус-вектору развертки индикатора от точки Н/Xо, Yо/ в направлении азимута Па;
б/ ИМП.ТИ-2 - момент формирования которого свидетельствует о том, что информация о радиолокационном изображении местности для текущего /мгновенного/ положения точки М/X, Y/ сформирована и может быть выдана в регистр /7/ с последующим преобразованием в блоке /18/ в видеосигнал и предъявлением на экране индикатора /19/;
в/ ИМП.Од - импульс нуль-дальности, момент формирования которого определяет начало прямого хода радиус-вектора развертки индикатора /19/;
г/ ИМП.НУ - сигнал начальной установки, характеризующий окончание прямого хода развертки индикатора /19/:
Формирование перечисленных сигналов выполняется с помощью блоков /26/…/35/, синхронизатора /2/, и осуществляется следующим образом.
Генератор импульсов /26/ вырабатывает непрерывную последовательность логических сигналов ИМП.Тг, частота следования которых задается равной 1,2 МГц. С выхода генератора импульсов /26/ сигналы ИМП.Тг поступают на первые входы элементов /34/, /35/ и через делитель /36/ - на вторые входы элементов /34/, /35/ и второй /счетный/ вход счетчика меток дальности /27/. Коэффициент деления блока /27/ задается равным 2 /двум/. Таким образом, частота следования импульсных сигналов ИМП.Тг на выходе делителя /36/ будет равна 0,6 МГц, что, в свою очередь, составляет один дискрет радиус-вектора развертки индикатора по дальности, который задается равным 0,250 км. Момент совпадения импульсных сигналов ″Лог. 1″, поступающих на первый и второй входы элемента ″И″ /34/, характеризует начало очередного периода импульсной последовательности сигналов ИМП.Тг на выходе делителя /36/, при этом, если на третий вход элемента ″И″ /34/ поступает сигнал ″Лог. 1″, то на выходе элемента ″И″ /34/ вырабатываются короткие /в виде ″Лог. 1″/ импульсные сигналы ИМП.ТИ-1. При поступлении на третий вход элемента ″И″ /34/ сигнала ″Лог. 0″ - элемент ″И″ /34/ закрыт и сигналы на выходе не формируются. Момент совпадения импульсных сигналов ″Лог. 0″, поступающих на первый и второй входы элемента ″ИЛИ-НЕ″ /35/, характеризует окончание очередного периода импульсной последовательности сигналов ИМП.Тг на выходе делителя /36/, при этом на выходе элемента ″ИЛИ-НЕ″ /35/ вырабатывается короткий, в виде ″Лог. 1″, импульсный сигнал ИМП.ТИ-2 и поступает на первый вход ключа /28/. Если на второй /управляющий/ вход ключа /28/ поступает с выхода триггера /33/ сигнал ″Лог. 1″, то импульсные сигналы ИМП.ТИ-2 поступают через ключ /28/ на первый /управляющий/ вход триггера /7/. Иначе, т.е. при поступлении на второй вход ключа /28/ сигнала ″Лог 0″, - ключ /28/ закрыт и сигналы на его выходе не формируются. Сигнал управления элементом ″И″ /34/ и ключом /28/ вырабатывается в виде логического сигнала ИМП.НУ с помощью триггера /33/ и с его выхода, который является вторым выходом синхронизатора /2/, поступает на третий вход элемента ″И″ /34/, второй вход ключа /28/, первый вход счетчика меток пеленга /15/, вход ФОИ /29/, третий вход регистров /5/ и /6/ и второй вход счетчиков /8/ и /9/.
Формирование сигнала ИМП.НУ осуществляется следующим образом. Путем счета импульсных сигналов, поступающих с выхода делителя /36/ на вход счетчика меток дальности /27/, на выходе последнего формируется параллельный 13-и разрядный двоичный код - ДТ /текущей дальности радиус-вектора развертки индикатора/ и поступает на вторые входы блоков сравнения /31/ и /32/. На первые входы блоков сравнения /31/ и /32/ поступают соответственно информация о длительности прямого хода развертки /Код - Дпр./ индикатора и длительности полного /прямого + обратного/ хода развертки /код - Дполн./ индикатора. В момент равенства Дт=Дполн. на выходе блока сравнения /32/ вырабатывается импульсный сигнал ИНРД /импульс начала прямого хода развертки дальности/, который поступает на второй вход триггера /33/ и устанавливает его в состояние ″Лог. 0″. Момент перехода сигнала ИМП.НУ из состояния ″Лог. 0″→″Лог. 1″ характеризует начало прямого хода развертки, при этом на выходе ФОИ /29/ вырабатывается импульсный сигнал запроса /ИМП.Од/ прямого хода развертки индикатора /19/. Коды Дпр. и Ддопл. задаются до начала работы с помощью датчика масштаба развертки /30/. Такое построение синхронизатора /2/ обеспечивает достаточно просто и без каких-либо изменений связей и номиналов элементов схем управления задание исходных значений масштаба прямого и полного хода развертки индикатора /19/ по дальности. Это, в свою очередь, позволяет использовать данное устройство в имитаторах и тренажерах, оснащенных индикаторами с различными значениями масштаба развертки.
Информация о радиолокационном изображении местности формируется и предъявляется на экране индикатора /19/ одинаково для каждого хода радиус-вектора развертки и выполняется с дискретом 0,250 км по дальности синхронно со сканированием развертки индикатора /19/ по дальности и по азимуту.
Сигнал ИМП.НУ, формируемый в виде ″Лог 0″ на втором выходе синхронизатора /2/, является сигналом ″начальной установки″ и поступает на вход счетчика меток пеленга /15/, третьи входы регистров /5/ и /6/, а также на вторые входы счетчиков /8/ и /9/, при этом:
- путем счета импульсных сигналов ИМП.НУ на выходе счетчика меток пеленга /15/ вырабатывается 12-разрядный параллельный двоичный код Па, численное значение которого характеризует положение радиус-вектора развертки индикатора /19/ и соответствует текущему направлению /азимуту/ ″скольжения″ точки М в плоскости закодированной акватории. После накопления ″Лог. 1″ во всех 12-ти разрядах счетчика /15/, последний автоматически сбрасывается и вновь начинается счет сигналов ИМИ.НУ;
- регистры /5/ и /6/ обнуляются;
- в счетчики /8/ и /9/, являющиеся счетчиками с предустановкой, записывается соответственно код - Xо и код Yо, которые поступают на их вторые входы с первого и второго выхода имитатора движения носителя станции /1/. Коды Xо и Yо определяют соответственно исходное положение точки М в плоскости закодированной акватории и характеризует местоположение центра экрана индикатора /19/ в этой же плоскости.
В течение сигнала ИМП.НУ = Лог. 0 /т.е. времени обратного хода развертки индикатора 19/ выполняется установка радиус-вектора развертки по азимуту, равному коду Па, которое осуществляется следующим образом:
- параллельный двоичный код Па с выхода счетчика меток пеленга /15/ поступает на вход ЦАП /16/, где преобразуется в аналоговый сигнал ″СИГН.Па″, амплитуда которого пропорциональна численному значению кода Па;
- с выхода ЦАП /16/ аналоговый сигнал СИГН.Па поступает на блок отработки азимута /17/ и устанавливает ось-вал исполнительного органа этого блока на угол, соответствующий численному значению амплитуды сигнала СИГН.Па. Так как вал блока отработки азимута /17/ жестко связан с отклоняющей системой развертки индикатора /19/, то и радиус-вектор развертки индикатора /19/ по азимуту будет отслеживать изменение численного значения кода Па.
В течение того же сигнала ИМП.НУ = Лог. 0, выполняется задание численного значения и знака приращений ΔX и ΔY координат X и Y точки М, которая должна ″скользить″ по линии радиус-вектора развертки с дискретом по дальности 0,250 км в направлении, соответствующем разрядам P1…P12 кода Па. Численное значение кодов ΔX, ΔY и их знаки хранятся в ЗУ-4 /13/ и ЗУ-5 /14/, при этом: по адресу считывания, которым является 12-и разрядный параллельный двоичный код Па, поступающий с выхода счетчика меток пеленга /15/ на входы ЗУ-4 /13/ и ЗУ-5 /14/, с выходов данных блоков считывается следующая информация:
- с первого и второго выходов ЗУ-4 /13/ считывается соответственно абсолютное значение и знак кода-ΔX, расчетное значение которого может быть определено по формуле /6/. Код-ΔX поступает на второй вход сумматора /3/, а знак кода-ΔX поступает на третий вход элемента ″И-НЕ″ /20/ и через элемент ″НЕ″ /24/ на третий вход элемента ″И-НЕ″ /22/;
- с первого и второго ЗУ-5 /14/ считывается соответственно абсолютное значение и знак кода - ΔY, расчетное значение которого может быть определено по формуле /7/. Код-ΔY построен на второй вход сумматора /4/, а знак кода-ΔY поступает на третий вход элемента ″И-НЕ″ /21/ и через элемент ″НЕ″ /25/ - на третий вход элемента ″И-НЕ″ /23/.
Рассмотренные блоки находятся в исходном состоянии до окончания сигнала ИМП.НУ = Лог. 0, которое характеризуется изменением его состояния из Лог. 0 → Лог. 1, т.е. свидетельствует об окончании обратного хода и начале прямого хода развертки индикатора.
Таким образом, формирование кода-Па /т.е. изменение текущего азимута имитируемой ″антенны″ синхронизируется импульсами ИМП.НУ и осуществляется на обратном ходе развертки индикатора /19/, что исключает возможность ″сбоев″ в работе устройства, которые заключаются в ″передергивании″ изображения на экране индикатора по азимуту в случае, если изменение кода Па осуществляется на прямом ходе развертки. Кроме того, обеспечивается учет динамики движения носителя РЛС, характеризующиеся изменением текущих координат Xо, Yо местоположения имитируемого носителя РЛС для каждого хода развертки, так как обновление /задание новых/ значений Xо и Yо в счетчиках /8/ и /9/ выполняется по каждому сигналу ИМП.НУ.
В момент изменения состояния ИМП.НУ из значения ″Лог. 0″ в ″Лог. 1″, т.е. в момент окончания обратного и начале прямого хода развертки - на третьем выходе синхронизатора /2/ вырабатывается импульсный сигнал ИМП.Од, который поступает на второй вход индикатора /19/ и запускает развертку индикатора /19/ на азимуте, равном коду Па.
Дальнейший процесс формирования информации о радиолокационном изображении состоит из следующих операций:
- операции формирования координат X и Y точки М, ″скользящей″ по радиус-вектору развертки;
- операции считывания данных из запоминающих устройств ЗУ-1 /10/, ЗУ-2 /11/ и ЗУ-3 /12/;
- операции ввода информации о радиолокационном изображении местности в регистр /7/, с последующим преобразованием кодовой информации в формирователе сигналов изображения /18/ в видеосигнал и предъявлением его в виде яркостной отметки на экране индикатора /19/.
Формирование информации выполняется одинаково для каждого из текущих положений точки М, ″скользящей″ от точки местоположения носителя /точки Н/Xо, Yо// через равные дискретные интервалы по дальности Др=0,250 км в направлении каждого из текущих значений разрядов Р1…Р12 кода Па, что, в свою очередь, определяет численное значение дискрета по азимуту ψ′=360/212=5,27, что значительно точнее аналогичного параметра Δψ прототипа. Формирование координат X и Y точки М осуществляется одинаково, одновременно и параллельно во времени, в темпе изменения развертки индикатора /19/ по дальности на дискрет 0,250 км, при этом:
- формирование координаты X обеспечивается блоками 3, 5, 8, 13, 20, 22 и 24;
- формирование координаты Y обеспечивается блоками 4, 6, 9, 14, 21, 23 и 25.
Рассмотрим подробно формирование координаты Х точки М.
Синхронно с передним фронтом сигнала ИМП.Од. формируется передний фронт сигнала ИМП.ТИ1, который с четвертого выхода синхронизатора /2/ поступает на второй вход регистра /5/ и на первые входы элементов ″И-НЕ″ /20/ и /22/, выходы которых подключены к первому /суммирующему/ входу и второму /вычитающему/ входу счетчика /8/. На втором выходе сумматора /3/ вырабатывается признак ″переполнения″. При этом: в случае, если признак ″переполнение″ = Лог. 1, то это свидетельствует о необходимости изменить состояние счетчика /8/ на единицу младшего разряда. Формирование признака ″переполнение″ является общеизвестной в вычислительной технике операцией суммирования над двумя числами, представленными двоичными параллельными кодами, и осуществляется в сумматоре /3/. Для первого сигнала ИМП.ТИ1, поступающего в стробе прямого хода развертки индикатора, признак ″перенос″ = Лог. 0. Это приводит к тому, что элементы И-НЕ /20/ и /22/ закрыты, т.е. на их выходах присутствует сигнал ″Лог 1″, и они не реагируют на изменение состояния сигналов, поступающих на их первые и третьи входы. А это приводит к тому, что на выходах счетчика /8/ вырабатывается код-Хо, при этом:
- в кодовую 7-разрядную кодовую шину первого выхода объединены разряды Р7…Р13 кода-Хо;
- во вторую 3-разрядную кодовую шину второго выхода объединены разряды Р4, Р5 и Р6 кода-Хо;
- в третью 3-разрядную кодовую шину третьего выхода объединены разряды Р1, Р2 и Р3 кода-Хо.
Цена младшего разряда Р1 кода-Хо соответствует дискрету по дальности 0,250 км. Информацию, формируемую на первом, втором и третьем выходах счетчика /8/ условно обозначен: КОД-Х1, КОД-Х2 и КОД-Х3 соответственно.
Задним фронтом сигнала ИМП.ТИ1 состояние информации, присутствующей на первом выходе сумматора /3/ и характеризующей численное значение выполненной арифметической операции суммирования над двумя числами, представленными параллельными двоичными кодами, которые поступают с первого выхода ЗУ-4 /13/ и выхода регистра /5/ соответственно на второй и первый входы сумматора /3/, записывается в регистр /5/. После этого на выходе регистра /5/ появляется информация о результате выполненной операции суммирования и на выходе сумматора /3/ формируется новое значение информации. Таким образом, с помощью сумматора /3/ и регистра /5/ по каждому заднему фронту /переходу из Лог. 1→Лог. 0/ сигнала ИМП.ТИ1 циклически выполняется ″операция накопления суммы двух чисел″.
Если в момент формирования очередного сигнала ИМП.ТИ1 на втором выходе сумматора /3/ признак ″переполнение″ равен ″Лог 1″, то это свидетельствует о том, что необходимо изменить состояние счетчика /8/ на единицу младшего разряда, при этом:
- если знак кода - ΔХ характеризуется наличием на втором выхода ЗУ-4 /13/ сигнала Лог. 1, т.е. значение ΔХ положительно, то элемент И-НЕ /22/ будет закрыт, а элемент И-НЕ /20/ - открыт;
- если знаки кода - ΔX характеризуются наличием на втором выходе ЗУ-4 /13/ сигналом Лог. 0, т.е. значение ΔХ отрицательно, то элемент ″И-НЕ″ /20/ закрыт, а элемент ″И-НЕ″ /22/ - открыт.
По переднему фронту сигнала ИМП.ТИ1, поступающему через один из открытых элементов ″И-НЕ″ /20/ или /22/ соответственно на первый или второй входы счетчика /8/, происходит изменение его состояния на единицу младшего разряда.
Таким образом, формирование каждого значения координат Х для точки М выполняется за два такта, а именно:
1. изменение /если признак ″переполнение″ = Лог 1/ или подтверждение прежнего /если признак ″переполнение″ = Лог. 0/ состояние информации о координате Х точки М в счетчике /8/. Эта операция начинается по переднему фронту сигнала ИМП.ТИ1 и заканчивается в течение длительности этого сигнала;
2. накопление суммы двух чисел в регистре /5/ и формирование состояния признака ″переноса″ на выходе сумматора /3/ для следующего сигнала ИМП.ТИ1. Эта операция начинает выполняться по заднему Фронту сигнала ИМП.ТИ1 и заканчивается до прихода следующего сигнала ИМП.ТИ1.
Следует особо отметить, что после окончания сигнала ИМП.ТИ1, элементы ″И-НЕ″ /20/ и /22/ закрываются и формируемый новый признак ″переполнение″, вырабатываемый сумматором /3/ до прихода следующего сигнала ИМП.ТИ1, не будет влиять на состояние счетчика /8/. Именно это обстоятельство позволяет значительно сократить время, требуемое для выполнения операции формирования координаты Х точки М, которое относительно переднего фронта сигнала ИМП.ТИ1 может быть оценено по следующей формуле


Известно, что при прочих равных условиях /например, типа элементной базы, на которой реализуется устройство/ время выполнения алгебраической операции суммирования над двумя разрядами чисел; представленных в виде параллельных двоичных кодов, больше, чем время изменения состояния счетчика на единицу младшего разряда /см. ОСТ 11.340.902-78, Микросхемы интегральные полупроводниковые, Руководство по применению./. Следовательно, и время tс /см. формулу /5/ настоящего описания/ будет значительно превышать время 
Аналогично рассмотренной операции формирования координаты X, выполняется с помощью блоков /4/, /6/, /9/, /14/, /21/, /23/ и /25/ формирование координат Y, при этом входы и выходы этих блоков в части нумерации, параметров формируемых сигналов и линий связи полностью повторяют входы и выходы блоков /3/, /5/, /8/, /13/, /20/, /22/, /24/. Информацию, формируемую на первом, втором и третьем выходах счетчика /9/ условно обозначим Код-Y1, Код-Y2, Код-Y3 соответственно.
Следующей операцией является операция считывания данных из запоминающих устройств ЗУ-1 /10/, ЗУ-2 /11/ и ЗУ-3 /12/, которая полностью повторяет аналогичную операцию считывания данных из запоминающих устройств ЗУ-1, ЗУ-2 и ЗУ-3 прототипа и подробно рассмотренную ранее при описании работы прототипа. Особенностью данной операции является то, что одновременно и параллельно во времени с ней выполняется формирование нового значения признака ″переполнения″ для следующего местоположения точки М, относительно настоящего. Именно совмещение двух операций во времени с учетом выполнения формирования кодов X и Y точки М с помощью счетчиков позволяет обеспечить, при прочих равных условиях, сокращения времени выполнения операции считывания данных из запоминающих устройств /10/, /11/ и /12/ и завершить формирование информации до начала следующего очередного импульсного сигнала ИМП.ТИ1.
Информация на выходе ЗУ-3 /12/ представляет собой параллельный двоичный код-РЛИМ, численное значение которого характеризует уровень отраженного сигнала от участка закодированного радиолокационного изображения местности в точке М/X, Y/. С выхода ЗУ-3 /12/ код-РЛИМ поступает на второй вход регистра /7/.
Последней операцией из процесса формирования информации о радиолокационном изображении местности является операция ввода кода-РЛИМ в регистр /7/, которая выполняется следующим образом.
В конце каждого периода следования сигнала ИМП.ТИ1 вырабатывается и с первого выхода синхронизатора /2/ поступает на первый вход триггера /7/ импульсный сигнал ИМП.ТИ2, при этом код-РЛИМ, присутствующий в этот момент на втором входе регистра /7/, поступает на хранение в регистр /7/. С выхода регистра /7/ код-РЛИМ поступает на формирователь сигналов изображения /18/, где преобразуется в видеосигнал СИГН.РЛИМ, амплитуда которого определяется значением кода РЛИМ. Видеосигнал СИГН.РЛИМ поступает на первый вход индикатора /19/, где предъявляется /отображается/ в виде яркостной отметки на экране индикатора.
Таким образом, сформирование радиолокационного изображения местности на экране индикатора позволяет значительно сократить время, требуемое на выполнение операции формирования координат X и Y точки М, скользящей по радиус-вектору развертки сумматора с дискретом 0,250 км по дальности, а это позволяет нормировать информацию о местности с последующим ее предъявлением на экране электронно-лучевой трубки индикатора кругового обзора синхронно со сканированием реального радиус-вектора развертки индикатора по дальности без задержки предъявления информации по азимуту, численное значение которого определяется разрядами Р1…Р12 кода Па, при этом:
- учитывается динамика движения имитируемого носителя РЛС, характеризующаяся изменением текущих координат точки Н/Хо, Yо/ местоположения носителя для каждого из 212 дискретов развертки по азимуту, что, в свою очередь, позволяет исключить ″сбои″, которые заключаются в ″передерживании″ изображения на экране индикатора в случае, если изменение /обновление/ кода Па осуществляется на прямом ходе развертки индикатора.
Функционирование предлагаемого имитатора радиолокационного изображения местности проверено путем макетирования и натурными испытаниями данного устройства.
Предлагаемое устройство по сравнению с известными устройствами такого же назначения /см. ″Справку об исследовании …″/ обладает следующими существенными преимуществами, что позволяет повысить достоверность /точность/ имитации физической модели внешней среды и работы реальной РЛС, при которых оператор не будет замечать информационного различия между радиолокационным изображением местности на экране индикатора реальной РЛС и на экране индикатора имитатора, что гарантирует положительный перенос навыков, полученных на устройстве обучения, на реальную РЛС.
Это достигается благодаря вновь введенным устройствам и связям. Введенные устройства дешевы, просты в изготовлении и эксплуатации и технически реализуемы на известных элементах цифровой техники.
Имитатор радиолокационного изображения местности будет использован в тренажере, предназначенном для подготовки операторов самолетных РЛС навыкам их боевой эксплуатации.
При использовании предлагаемого устройства ожидается повышение точности имитации радиолокационного изображения местности на экране индикатора имитатора и, как следствие, повышение выучки оператора РЛС идентификации участков местности по их радиолокационному изображению в условиях многообразия возможных конфигураций линии береговой черты и размеров участков местности, обладающих различными отражающими свойствами, за счет формирования информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора синхронно со сканированием радиус-вектора развертки индикатора по дальности в темпе изменения длины развертки на дискрет 0,250 км без задержки предъявления информации по азимуту с учетом жесткой привязки формирования текущих значений азимута развертки индикатора к обратному ходу развертки индикатора по дальности.
Результаты макетирования и натурные испытания имитатора радиолокационного изображения местности подтвердили его высокую эффективность с точки зрения повышения точности имитации радиолокационного изображения местности на экране индикатора имитатора за счет повышения достоверности имитации физическое модели внешней среды радиолокационного изображения местности и работы реальной РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1985 |
|
SU1840927A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| СЕКТОРНЫЙ ИНДИКАТОР МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1979 |
|
SU1840910A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Тренажер операторов радиолокационных станций | 1984 |
|
SU1221676A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1980 |
|
SU938309A1 |
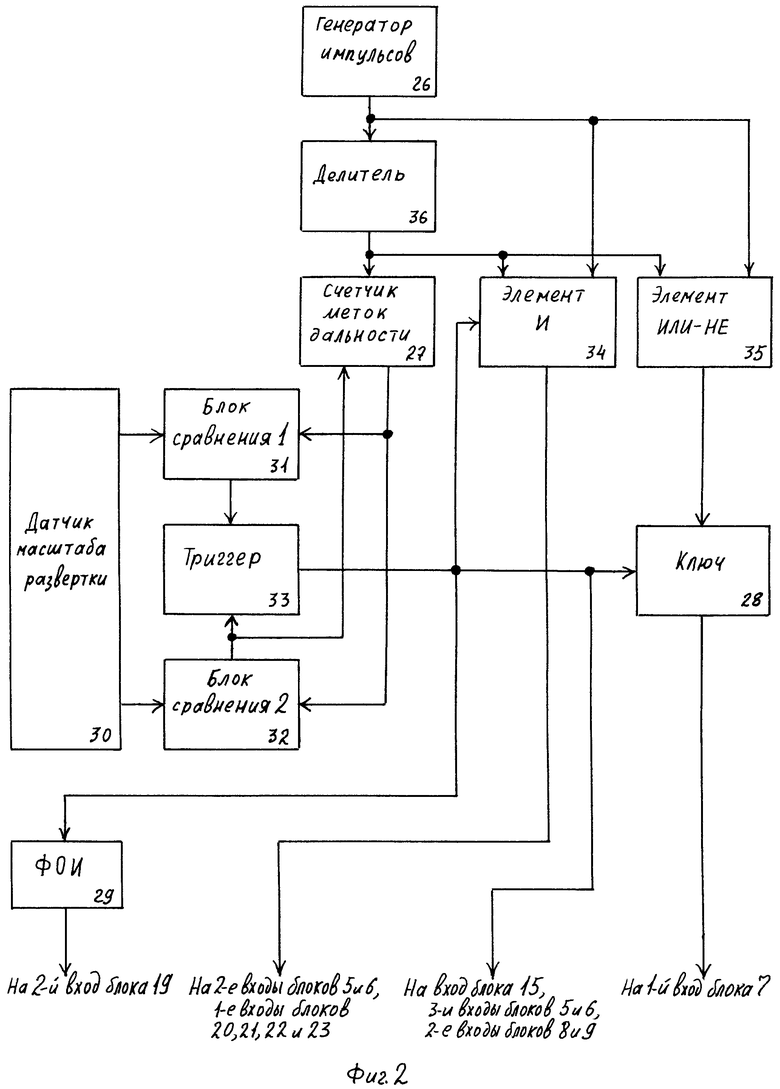
Изобретение относится к области тренажеростроения и может быть использовано при обучении операторов. Достигаемый технический результат - повышение точности имитации радиолокационного изображения местности на экране индикатора. Указанный результат достигается за счет того, что имитатор содержит имитатор движения носителя станции, синхронизатор, первый и второй сумматоры, первый, второй и третий регистры, первый и второй счетчики, первый, второй, третий, четвертый и пятый запоминающие узлы, счетчик меток пеленга, цифроаналоговый преобразователь, блок обработки азимута, формирователь сигналов изображения, индикатор, первый, второй, третий и четвертый элементы И-НЕ, первый и второй элементы НЕ. Все перечисленные средства определенным образом соединены между собой. 1 з.п. ф-лы, 2 ил.
1. Устройство для имитации радиолокационного изображения местности, содержащее имитатор движения носителя станции, синхронизатор, первый и второй сумматоры, первый, второй и третий регистры, первый и второй счетчики, первый, второй, третий, четвертый и пятый запоминающие узлы, последовательно соединенные счетчик меток пеленга, цифроаналоговый преобразователь и блок отработки азимута, а также последовательно соединенные формирователь сигналов изображения и индикатор, причем первый и третий выходы синхронизатора подключены соответственно к первому входу третьего регистра и второму входу индикатора, третий вход которого подключен к выходу блока отработки азимута, выход третьего регистра подключен к входу формирователя сигналов изображения, выход первого запоминающего узла соединен с третьим входом второго запоминающего узла, выход которого подключен к третьему входу третьего запоминающего узла, выходы первого и второго регистров подключены к первым входам соответственно первого и второго сумматоров, вторые входы которых подключены к первым выходам соответственно четвертого и пятого запоминающих узлов, отличающийся тем, что, с целью повышения точности имитации радиолокационного изображения местности на экране индикатора за счет формирования информации о местности с последующим предъявлением на экране электронно-лучевой трубки индикатора кругового обзора синхронно со сканированием радиус-вектора развертки индикатора по дальности в темпе изменения длины развертки без задержки предъявления информации по азимуту с учетом привязки момента формирования текущего значения азимута развертки индикатора к обратному ходу развертки индикатора по дальности, введены первый, второй, третий и четвертый элементы ″И-НЕ″, первый и второй элементы ″НЕ″, причем выходы первого и второго элементов ″И-НЕ″ подключены к первым входам соответственно первого и второго счетчиков, первые выходы первого и второго сумматоров подключены к первым входам соответственно первого и второго регистров, четвертый выход синхронизатора подключен к соединенным вместе вторым входам первого и второго регистров и первым входам первого, второго, третьего и четвертого элементов ″И-НЕ″, второй выход первого сумматора подключен к вторым входам первого и третьего элементов ″И-НЕ″, второй выход второго сумматора подключен к вторым входам второго и четвертого элементов ″И-НЕ″, второй выход четвертого запоминающего узла подключен к третьему входу первого элемента ″И-НЕ″ и через первый элемент ″НЕ″ - к третьему входу третьего элемента ″И-НЕ″, второй выход пятого запоминающего узла подключен к третьему входу второго элемента ″И-НЕ″ и через второй элемент ″НЕ″ к третьему входу четвертого элемента ″И-НЕ″, второй выход синхронизатора подключен к соединенным вместе третьим входам первого и второго регистров, вторым входам первого и второго счетчиков и к входу счетчика меток пеленга, выход которого соединен с входами четвертого и пятого запоминающих устройств, выходы третьего и четвертого элементов ″И-НЕ″ подключены к третьим входам соответственно первого и второго счетчиков, первый, второй и третий выходы первого счетчика подключены к первым входам соответственно первого, второго и третьего запоминающих узлов, первый, второй и третий выходы второго счетчика подключены к вторым входам соответственно первого, второго и третьего запоминающих узлов, первый и второй выходы имитатора движения носителя станции подключены к четвертым входам соответственно первого и второго счетчиков, а выход третьего запоминающего узла соединен с вторым входом третьего регистра.
2. Устройство для имитации радиолокационного изображения местности по п. 1, отличающееся тем, что в синхронизатор, содержащий генератор импульсов, счетчик меток дальности, ключ, формирователь одиночного импульса, выход которого является третьим выходом синхронизатора, и последовательно соединенные датчик масштаба развертки, первый блок сравнения и триггер, выход которого подключен к второму входу ключа, причем выход ключа является первым выходом синхронизатора, а выход счетчика меток дальности подключен к второму входу первого блока сравнения, введены второй блок сравнения, элемент ″И″, выход которого является четвертым выходом синхронизатора, элемент ″ИЛИ-НЕ″, выход которого подключен к первому входу ключа, и делитель, вход которого соединен с первыми входами элементов ″И″ и ″ИЛИ-НЕ″ и подключен к выходу генератора импульсов, причем второй выход датчика масштаба развертки и выход счетчика меток дальности подключены соответственно к первому и второму входам второго блока сравнения, выход которого подключен к соединенным вместе второму входу триггера и первому входу счетчика меток дальности, выход делителя подключен к вторым входам счетчика меток дальности, элемента ″ИЛИ-НЕ″ и элемента ″И″, а выход триггера соединен с входом формирователя одиночного импульса и третьим входом элемента ″И″ и является вторым выходом синхронизатора.
| Патент США №3801720, МКИ G09B 9/00, Цифровой генератор визуального вывода, 1984 г. |

