Предлагаемая станция активных помех относится к радиотехнике и может быть использована в аппаратуре радиопротиводействия, предназначенной для подавления импульсных радиолокационных станций.
Известны станции активных помех, предназначенные для подавления радиолокационных станций (см. обзор "Модели радиоэлектронного противодействия авиации вероятного противника", Воронеж, 1969 г.).
Наиболее распространенными станциями активных помех являются станции (и передатчики) серий AN/ALT, и QRC.
Для борьбы с обзорными РЛС эти станции используют, в основном, режимы создания заградительных, скользящих и ответных помех.
В заградительном режиме помеха может быть создана во всем диапазоне возможных рабочих частот подавляемой РЛС. При этом любые режимы перестройки РЛС по частоте не дают заметного ослабления уровня помехи. Недостатком же такого режима работы станции помех является низкая спектральная плотность помехи, обусловленная распределением энергии помехи в широком диапазоне частот.
По данным, приведенным в книге "Защита от помех" под ред. М.В. Максимова, "Сов. радио", М., 1976, стр.296, быстрая перестройка частоты может осуществляться в диапазоне, составляющем единицы (3÷5) процентов от среднего значения частоты с перспективой увеличения этого диапазона до (0,1÷0,15)fo.
В типичном случае диапазона перестройка РЛС и полосы пропускания его приемника отношение мощностей передатчиков заградительных и ответных помех оценивается величиной в 100 раз для создания равной спектральной плотности помехи. И наоборот, при равных мощностях передатчиков спектральная плотность заградительной помехи будет в 100 раз меньше.
Эффективность помехи зависит и от того, по главному или по боковым лепесткам диаграммы направленности антенны она воздействует на РЛС. Воздействие по боковым ослаблено на 20÷30 дБ уже самой диаграммой направленности антенны. Дополнительное ослабление влияния помехи по боковым лепесткам может быть получено путем использования специальных компенсаторов помех по боковым лепесткам ("Защита от помех", под ред. М.В. Максимова, М., "Сов. радио", 1976, §5.2).
Так как большую часть времени воздействие помех на РЛС производится по боковым лепесткам, то наиболее вероятно, что большинство станций помех будут работать именно в режимах скользящих и ответных помех, чтобы создать достаточно высокую плотность помехи.
Однако недостатками таких режимов является то, что они не обеспечивают подавление РЛС в течение всего периода повторения, сигналы от части участков дальности принимаются без помех. Так при скользящих помехах происходит последовательное подавление всех возможных рабочих частот РЛС, на реальной же рабочей частоте помеха будет только часть периода. При работе РЛС в режиме перестройки от импульса к импульсу ответная помеха не подавляет сигналы от целей, находящихся между РЛС и станцией помех, так как не имеет информацию о рабочей частоте РЛС до приема ее зондирующего импульса. Более того, так как время наведения ответной помехи составляет 200÷400 мксек (см. обзор, стр.29, таблица 5), то РЛС сможет наблюдать сам постановщик помех и значительный участок дальности за ним (примерно 30 км).
В качестве прототипа выбираем станцию активных помех серии AN/ALT-16, описанную в обзоре "Модели радиоэлектронного противодействия авиации вероятного противника", Воронеж, 1969. Это станция прямошумовых помех. Она содержит приемный канал, передающий канал, коммутатор режимов приема и передачи, выходы которого соединены с управляющими входами приемного и передающего каналов, датчик периода повторения импульсов РЛС, вычислитель интервалов времени приема, первый вход которого соединен с выходом приемного канала, второй - с выходом датчика периода повторения РЛС, а выход - с входом коммутатора режимов приема и передачи, генератор шума и полосовой фильтр, сигнальный вход которого соединен с выходом генератора шума, а выход - с сигнальным входом передатчика.
Недостатком работы такой станции помех является, как указывалось выше, то обстоятельство, что она неэффективно подавляет РЛС с быстрой перестройкой по частоте и анализом спектра помехи перед излучением импульса.
Целью настоящего изобретения является устранение указанного недостатка.
Поставленная цель достигается тем, что в станцию активных помех, содержащую приемный и передающий каналы, коммутатор режимов приема и передачи, выходы которого соединены с управляющими входами приемного и передающего каналов, датчик периода повторения импульсов РЛС, вычислитель интервалов времени приема, первый вход которого соединен с выходом приемного канала, второй - с выходом датчика периода повторения импульсов РЛС, а выход - со входом коммутатора режимов приема и передачи, генератор шума и полосовой фильтр, сигнальный вход которого соединен с выходом генератора шума, вводятся режекторный фильтр, сигнальный вход которого соединяется с выходом генератора шума, блок сопряжения частот фильтров, выход которого соединяется со входами управления частотами полосового и режекторного фильтров, переключатель спектра, первый сигнальный вход которого соединяется с выходом полосового фильтра, второй - с выходом режекторного фильтра, а выход - с сигнальным входом передающего канала, формирователь переключающего импульса, датчик времени анализа помехи в РЛС и соединенные последовательно датчик дальности до РЛС, вычислитель времени распространения сигнала и вычислитель времени задержки, причем выход датчика времени анализа помехи в РЛС соединяется с вторыми входами вычислителя времени задержки и формирователя переключающего импульса, третий вход вычислителя времени задержки соединяется с выходом датчика периода повторения импульсов РЛС, выход его - с первым входом формирователя переключающего импульса, третий вход которого соединяется с выходом приемного канала, а выход - с управляющим входом переключателя спектра.
Введенный переключатель спектра осуществляет кратковременное переключение станции помех в режим создания ложной помехи, когда помеха создается на всех возможных рабочих частотах РЛС за исключением той, на которой в действительности предполагается создать помеху.
Введенный режекторный фильтр формирует такую ложную помеху.
Введенный блок сопряжения частот фильтров обеспечивает совпадение частот минимума в спектре ложной помехи и максимума в спектре действительной помехи.
Введенные формирователь переключающего импульса, датчик времени анализа помехи в РЛС, датчик дальности до РЛС, вычислитель времени распространения сигнала и вычислитель времени задержки служат для того, чтобы поступающая в приемник РЛС помеха на интервале времени, отведенном в РЛС на анализ спектра помехи и выбор рабочей частоты, была ложной, а в остальное время - действительной, сконцентрированной на предполагаемой рабочей частоте РЛС.
Автоматическое устройство выбора частоты РЛС по результатам анализа спектра ложной помехи выберет в качестве рабочей частоту, которую станция помех предполагает подавлять, и сразу же после излучения зондирующего импульса РЛС получит мощную узкополосную помеху на рабочей частоте, что обеспечит полное подавление РЛС, достижение поставленной цели.
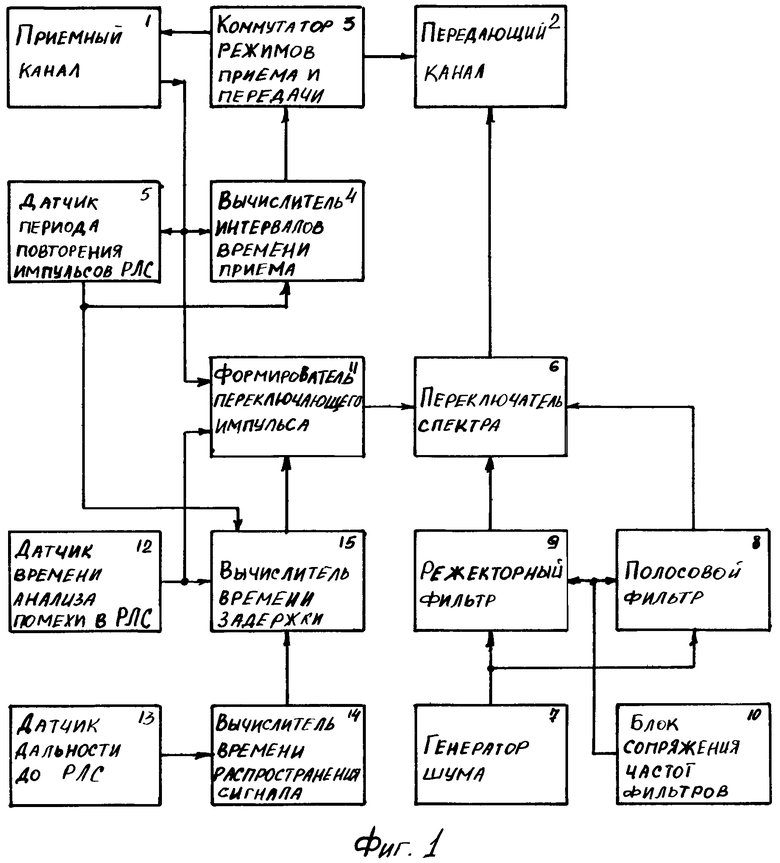
На фиг.1 представлена функциональная схема предлагаемой станции активных помех.
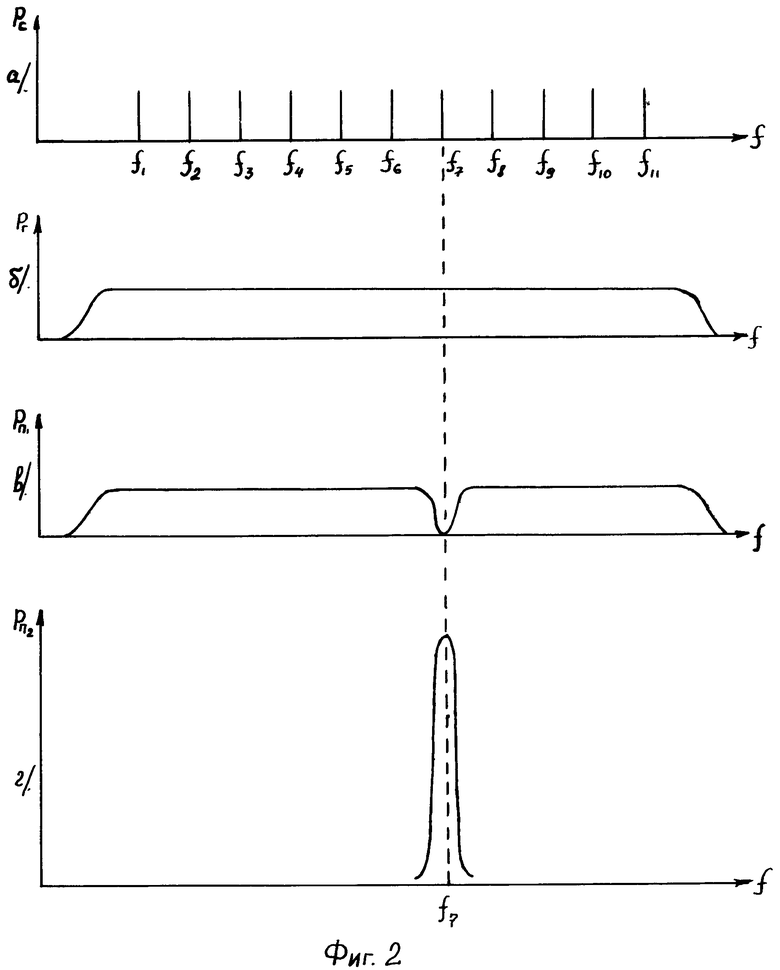
На фиг.2 представлены спектры создаваемых помех, причем на фиг.2, а представлены рабочие частоты подавляемой РЛС, на фиг.2, б - спектр сигнала генератора шума, на фиг.2, в - спектр ложной помехи, на фиг.2, г - спектр действительной помехи.
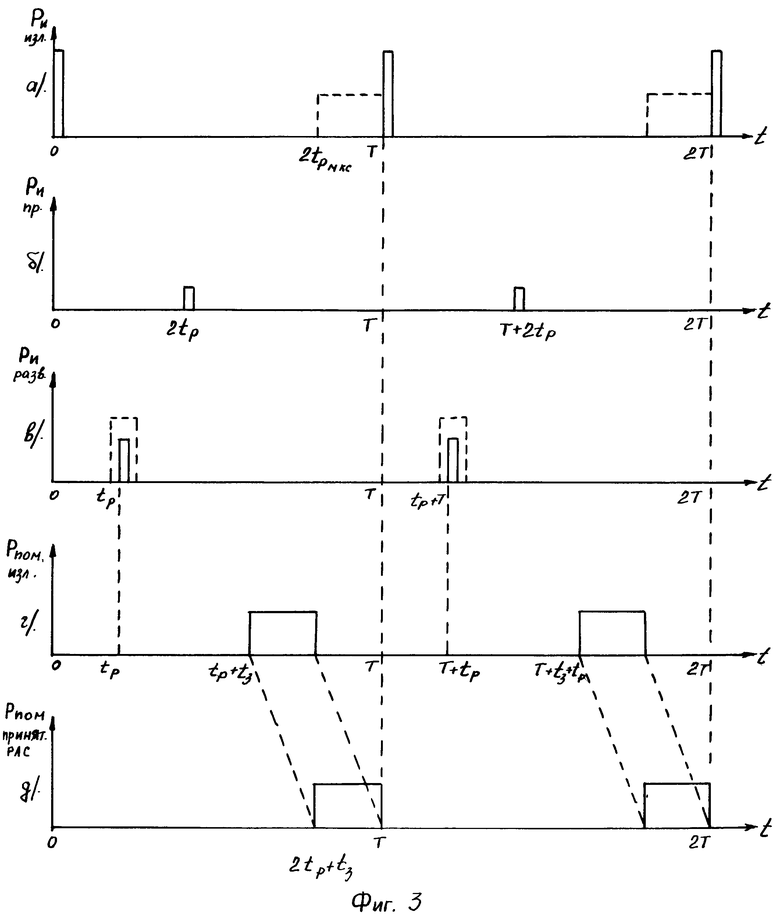
На фиг.3 представлены временные диаграммы работы станции помех.
Предлагаемая станция помех содержит приемный канал 1, передающий канал 2, коммутатор режимов приема и передачи 3, вычислитель интервалов приема 4, датчик 5 периода повторения импульсов РЛС, переключатель спектра 6, генератор шума 7, полосовой фильтр 8, режекторный фильтр 9, блок 10 сопряжения частот фильтров, формирователь 11 переключающего импульса, датчик 12 времени анализа помехи в РЛС, датчик 13 дальности до РЛС, вычислитель 14 времени распространения сигнала, вычислитель 15 времени задержки.
Приемный канал 1 содержит антенну и супергетеродинный приемник с широкой перестройкой по диапазону частот путем электронного управления гетеродином.
Передающий канал 2 содержит усилитель мощности СВЧ и антенну.
Коммутатор 3 режимов приема и передачи выполнен в виде электронного блока, обеспечивающего поочередное включение приемного 1 и передающего 2 каналов. Переходные процессы при этом составляют 0,5-1 мксек.
Вычислитель 4 интервалов приема выполнен в виде узла задержки на величину, меньшую периода повторения РЛС на 10 мксек, и формирователя прямоугольного коммутирующего импульса длительностью 30 мксек.
Датчик 5 периода повторения импульсов РЛС - цифровой преобразователь интервала между двумя принятыми импульсами РЛС в код.
Переключатель спектра 6 - СВЧ переключатель, выполненный в виде двух маломощных ЛБВ, включаемых поочередно, и СВЧ сумматора выходных сигналов ЛБВ. Входы ЛБВ являются сигнальными входами переключателя.
Генератор шума 7 - генератор шума на ЛБВ с широкополосным фильтром на выходе, полоса пропускания которого равна или несколько больше диапазона перестройки подавляемой РЛС.
Полосовой фильтр 8 и режекторный фильтр 9 - СВЧ-фильтры на ЖИГ элементах, с электронным управлением частотой. Пределы перестройки их должны совпадать с диапазоном перестройки подавляемой РЛС. Полосы обоих фильтров равны 15÷20 МГц.
Блок 10 сопряжения частот - электронное устройство, предназначенное для поддержания равенства частот полосового фильтра 8 и режекторного фильтра 9 при их перестройке в диапазоне частот, выполнено в аналого-цифровом виде.
Датчик 12 времени анализа помехи в РЛС - цифровой блок, находящий 10% от измеренного в блоке 5 периода повторения подавляемой РЛС /при наличии на борту аппаратуры распознавания типов РЛС в качестве датчика 12 можно использовать запоминающее устройство, выдающее точное значение времени анализа в ответ на сигнал о типе подлежащей подавлению РЛС/.
Датчик 13 дальности до РЛС - бортовая радиолокационная станция кругового обзора, выдающая результаты измерения дальности до объекта, на котором расположена подлежащая подавлению РЛС.
Вычислитель 14 времени распространения сигнала - цифровой блок на основании информации о дальности до РЛС вычисляющий время распространения сигнала (в одну сторону), т.е. осуществляющий вычисление по формуле

где Д - дальность до РЛС;
С - скорость распространения сигнала.
Вычислитель 15 времени задержки - цифровой блок, осуществляющий вычисление по формуле
tзад.=T-tа-2tр,
где T - период повторения импульсов подавляемой РЛС;
tа - время анализа помех в РЛС.
Формирователь 11 переключающего импульса - заторможенный генератор импульса прямоугольной формы с электронно-регулируемой длительностью. Третий вход формирователя 11, соединенный с выходом приемного канала 1, является входом запуска. Второй вход является входом управления длительностью формируемого импульса, первый - входом введения задержки запуска относительно запускающего импульса.
Работает станция следующим образом.
Приемный канал 1 принимает зондирующие импульсы РЛС. При обработке выходных сигналов приемного канала 1 в датчике периода повторения импульсов РЛС 5 измеряется период повторения зондирующих импульсов и на выходе датчика 5 появляется код, соответствующий измеренному периоду. Вычислитель интервалов приема 4 на основании информации о периоде повторения зондирующих импульсов РЛС, поступающей из блока 5, и о моменте прихода зондирующего импульса, поступающей из канала 1, вычисляет временное положение коммутирующего импульса, который с помощью коммутатора режимов приема и передачи 3 должен перевести станцию помех в режим приема, чтобы очередной зондирующий импульс мог быть принят. Коммутирующий импульс имеет длительность 30 мксек, принимаемый зондирующий импульс РЛС во времени приближенно совмещен с центром коммутирующего импульса.
При этом устанавливается режим, когда станция помех излучает помехи почти непрерывно и только кратковременно (со скважностью порядка 30) осуществляет прием и анализ сигналов подавляемой РЛС.
Генератор шума 7 создает широкополосную шумовую помеху (фиг.2, б), перекрывающую весь диапазон перестройки РЛС (фиг.2, а). Полосовой фильтр 8 выделяет из этого широкополосного шума узкую полосу шириной порядка 20 МГц (фиг.2, г). Когда переключатель 6 пропускает выходной сигнал (шум) полосового фильтра 8 на вход передающего канала 2, энергия излучаемой помехи концентрируется именно в этой полосе.
Режекторный фильтр 9 пропускает все частоты за исключением узкой полосы порядка 20 МГц. В результате при пропускании переключателем 6 сигналов от режекторного фильтра 9 станция излучает широкополосную шумовую помеху, перекрывающую весь диапазон перестройки РЛС, с узким провалом в районе частоты настройки режекторного фильтра 9 (фиг.2, в). Блок 10 сопряжения частот фильтров обеспечивает во всех случаях совпадение средних частот настройки полосового фильтра 8 и режекторного фильтра 9, в результате чего сформированный ложный спектр помехи (фиг.2, в) будет перекрывать весь диапазон рабочих частот РЛС, за исключением узкой полосы, в которой именно и будет в действительности создана мощная узкополосная помеха.
Радиолокационная станция излучает последовательность зондирующих импульсов с периодом повторения T (фиг.3, а). Прием отраженных сигналов происходит в каждом периоде в течение времени 2tp макс., где tp макс. - время распространения сигнала от РЛС до цели, находящейся на максимальной для данной РЛС дальности. Прием и анализ помех, выбор очередной рабочей частоты перед излучением очередного зондирующего импульса происходит в течение интервала времени tа (пунктир на фиг.3, а). В РЛС выполняется соотношение
T=2tр макс+tа.
При наличии цели, время распространения сигнала до которой равно tр, в приемнике РЛС появятся отраженные от цели сигналы с задержкой относительно момента излучения соответственно на время 2tр, время распространения сигнала до цели и обратно (фиг.3, б).
В приемном канале станции помех, размещенной на этой цели, сигнал появится через время tр, время распространения сигнала в одну сторону (фиг.3, в). Пунктиром здесь показано временное положение коммутирующего импульса, управляющего режимами приема и передачи через коммутатор 3.
Формирователь 11 переключающего импульса вырабатывает импульс, управляющий переключателем спектра 6, имеющий длительность, равную приближенно длительности анализа помех tа в РЛС, что задается датчиком 12 времени анализа помехи в РЛС.
Рассмотрим случай, когда подавляется РЛС, период повторения импульсов которой T=1000 мксек, время анализа помехи в РЛС tа=1000 мксек, а расстояние от станции помех до РЛС равно 50 км.
Вычислитель 14 времени распространения по данным, поступившим от бортовой РЛС (датчика 13), находит время распространения сигнала

Вычислитель 15 времени задержки находит время задержки
tзад.=T-tа-2tр=1000-100-2·166,(6)=566,(6) (мксек)
Помеха с ложным спектром поступит на вход РЛС с общей задержкой относительно момента излучения зондирующего импульса, равной сумме времени распространения зондирующего импульса от РЛС до станции помех, времени задержки в станции помех, заданным вычислителем 15, и времени распространения от станции помех до РЛС, т.е.
Δt=tр+tзад.+tр=166,(6)+566,(6)+166,(6)=900 (мксек)
Длится эта помеха 100 мксек. Следовательно, в приемнике РЛС в течение всего интервала времени, когда анализируется помеха и выбирается очередная рабочая частота, действует ложная помеха. Выбор частоты в РЛС осуществляется автоматически по минимуму спектральной плотности помехи во время анализа спектра. Таким образом, в данном случае производится настройка РЛС на частоту, соответствующую минимуму спектра ложной помехи и максимуму спектра действительной помехи, которая будет воздействовать на РЛС во время приема отраженных сигналов.
РЛС будет подавляться узкополосной помехой большой спектральной плотности, причем это подавление будет происходить в течение всего периода приема сигналов в РЛС, в том числе и в РЛС, работающих в режиме перестройки по частоте от импульса к импульсу.
Известные же станции помех не могут создать эффективной помехи для таких РЛС, не могут помешать обнаружению целей на участке между РЛС и станцией помех, обнаружению носителя станции помех, обнаружению целей на участке непосредственно за носителем станции помех.
Так как подавляющее большинство современных РЛС военного назначения работает с быстрой перестройкой по частоте, то предлагаемая станция помех, впервые обеспечивающая действительно эффективное подавление таких РЛС, должна найти широкое применение в технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖИТЕЛЬ РАДИОИМПУЛЬСОВ | 1979 |
|
SU1840949A1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2439609C2 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| Способ радиоэлектронной защиты наземной РЛС кругового обзора и устройство для его реализации | 2023 |
|
RU2812727C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2001 |
|
RU2217874C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОТВЕТНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2021 |
|
RU2771356C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОТВЕТНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2002 |
|
RU2237372C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
Изобретение относится к радиотехнике и может быть использовано в аппаратуре радиопротиводействия. Достигаемый технический результат - повышение эффективности подавления помех. Указанный результат достигается за счет того, что станция активных помех содержит вычислитель интервалов времени приема, коммутатор, приемный и передающий каналы, датчик периода повторения радиолокационных импульсов, генератор шума, полосовой фильтр, датчик дальности до радиолокатора, вычислитель времени распространения сигнала, вычислитель времени задержки, датчик времени анализа помехи, формирователь переключающего импульса, переключатель спектра, блок сопряжения частот фильтров, режекторый фильтр, определенным образом соединенные между собой. 3 ил.
Станция активных помех, содержащая последовательно соединенные вычислитель интервалов времени приема и коммутатор, соединенный своими выходами с управляющими входами приемного и передающего каналов, а также датчик периода повторения радиолокационных импульсов, который своим входом соединен с выходом приемного канала и первым входом вычислителя интервалов времени приема, а выход - с его вторым входом, и генератор шума, соединенный с полосовым фильтром, отличающаяся тем, что, с целью повышения эффективности подавления РЛС с быстрой перестройкой по частоте и анализом спектра помехи, в нее введены последовательно соединенные датчик дальности до радиолокатора, вычислитель времени распространения сигнала, вычислитель времени задержки, подсоединенный к датчику времени анализа помехи, формирователь переключающего импульса и переключатель спектра, соединенный с передающим каналом, а также последовательно соединенные блок сопряжения частот фильтров и режекторный фильтр, соединенный с входом переключателя спектра, другой вход которого соединен с выходам полосового фильтра, один из входов которого соединен с выходом блока сопряжения частот фильтров, выход датчика периода повторения радиолокационных импульсов подключен к входу вычислителя времени задержки, выходы приемного канала и датчики времени анализа помехи соединены с соответствующими входами формирователя переключающего импульса, а выход генератора шума дополнительно подключен к входу режекторного фильтра.
| Патент США №3670333, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Насос | 1917 |
|
SU13A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Обзор "Модели радиоэлектронного противодействия авиации вероятного противника", Воронеж, 1969. | |||

