Предлагаемое изобретение относится к области пеленгационных средств и приборов управления и может быть использовано при разработке систем обнаружения малоразмерных целей и определения их координат в инфракрасной области спектра излучения объектов.
Известны координаторы. Они, как правило, содержат следующие основные элементы: объектив, анализатор изображения, конденсор и приемник лучистой энергии. Различаются координаторы в основном анализаторами изображения.
В координаторе /см. например, Л.З. Криксунов и И.Ф. Усольцев, "Инфракрасные системы", М., изд-во "Советское радио", 1968, стр. 214-216/ анализатор изображения выполнен в виде модулирующего диска, который имеет границу между прозрачной и непрозрачной частью, выполненную на 360° по спирали Архимеда. Спираль начинается на оси Y и кончается на ней. Расположен модулирующий диск в фокальной плоскости объектива. В зависимости от положения объекта в фокальной плоскости объектива, приемник лучистой энергии закрывается на больший или меньший промежуток времени. Угол рассогласования определяется по длительности импульса в цепи приемника лучистой энергии, вызванного воздействием излучения объекта.
Координатор по вышеописанной структуре строится и для диафрагмы, которая имеет спиральный вырез /см. Л.З. Криксунов, "Справочник" по основам инфракрасной техники", М., изд-во "Советское радио", 1978, стр. 351-352/. Спиральный вырез диафрагмы начинается на оси Y и на ней кончается, т.е. вырез сделан на 360°. При вращении диафрагмы спиральный вырез последовательно "просматривает" изображение заданного поля. Если в некоторый момент времени вырез пересекает изображение источника излучения, возникает импульс, заканчивающийся в конце каждого оборота диафрагмы. Соотношение между длительностью импульса и пауз между ними определяется положением изображения относительно нейтральной точки, которая соответствует половине оборота диафрагмы.
В координаторе /см. В.В. Козелкин и И.Ф. Усольцев, "Основы инфракрасной техники", М., изд-во "Машиностроение", 1974, стр. 236-238/ анализатор выполнен в виде плоского тонкого непрозрачного диска, в котором с центра его по спирали Архимеда вырезана на 360° щель, пропускающая собираемое объективом тепловое излучение. Расположен анализатор в фокальной плоскости объектива. Одновременно и синхронно с анализатором вращается кулачек блока преобразования сигналов. В момент пересечения кулачком оси Y на блок преобразования сигналов подается опорный импульс напряжения. При повороте диска еще на некоторый угол его щель пересечет изображение объекта и тепловая энергия, пройдя через щель, попадает на конденсор, а с него концентрируется на приемник. С приемника через усилитель в этот момент на блок преобразования сигналов поступает электрический импульс от изображения объекта. При равномерном вращении диска и кулачка подача опорных импульсов в блок преобразования сигналов следует через равные промежутки времени, меняется только время поступления импульса от приемника, которое зависит от положения изображения объекта в фокальной плоскости объектива по оси Y. Время между началами опорного импульса и импульса от приемника пропорционально координате Y объекта, т.е. составляющей угла рассогласования по оси Y.
В данных координаторах определяется координата только по оси Y. Для получения координаты по оси Z необходим второй канал, аналогичный первому, что усложняет устройство. Это является их основным недостатком. Другим недостатком является расположение анализатора изображения в фокальной плоскости объектива, что приводит к увеличению поперечных габаритов фокусирующей системы и ее ориентировочным расчетам.
Координатор, который выбран за прототип, /см. М.М. Мирошников, "Теоретические основы оптико-электронных приборов", г. Ленинград, изд-во "Машиностроение", Ленинградское отделение, 1983, стр. 151/ является двухкоординатным. В нем применен фазоширотно-импульсный растр. При каждом обороте растра вырабатывается один опорный импульс. Интервал времени между опорным импульсом и передним фронтом импульса от изображения цели пропорционален полярному углу φ. Длительность импульса является мерой радиального смещения изображения α=const·β. Граница между прозрачной и непрозрачной частями растра выполнена по спирали Архимеда на 360°.
Недостатками данного устройства является определение координаты только единичного объекта, расположение модулирующего диска в вокальной плоскости объектива.
Целью предлагаемого изобретения является определение координат группы объектов, находящихся в поле обзора устройства, а также упрощение его.
Поставленная цель достигается за счет того, что в координаторе, содержащем последовательно установленные на одной оптической оси приемный объектив, анализатор изображения с держателем, в котором выполнено синхронизирующее отверстие с обеих сторон которого установлена пара светодиод-фотодиод, подключенным через редуктор к исполнительному электродвигателю, конденсор, преемник лучистой энергии с блоком питания, счетно-решающее устройство, отличающийся тем, что, с целью определения координат группы объектов, находящихся в поле обзора приемного объектива, а также упрощения устройства, анализатор изображения и конденсор выполнены в виде оптического узла, состоящего из двух одинаковых по диаметру плосковыпуклых оптически сопряженных и жестко связанных между собой линз, внутренняя плоская поверхность одной из них выполнена с непрозрачным для видимого и инфракрасного излучений покрытием, в котором выполнена щель на 180° по спирали Архимеда, с началом на оптической оси и окончанием на оси - X в точке максимального радиуса линз оптического узла, причем плоскость сопряжения линз оптического узла является главная плоскость оптического узла, которая расположена в фокальной плоскости приемного объектива, а синхронизирующее отверстие расположено на оси X на расстоянии, большем, чем радиус линз оптического узла, причем оптическая ось пары светодиод-фотодиод параллельна оптической оси устройства, выход фотодиода подключен через схему выреза импульсов и линии задержки к входам источников питания элементов приемника, кроме источника питания элемента первого квадранта, подключенного к выходу схемы выреза импульсов непосредственно, выходы которых соединены соответственно с питающими входами четырехэлементного квадрантного приемника, при этом четыре сигнальных выхода элементов приемника и четыре выхода источников питания подключены к счетно-решающему устройству, девятый вход которого связан с оптико-механическим датчиком углового положения, расположенным на выходной оси редуктора.
Предлагаемое устройство существенно отличается по своим функциональным возможностям по сравнению с известными устройствами.
Три аналога, приведенные в заявке, примерно при таком же конструктивном выполнении, определяют только одну координату единичного излучающего объекта. Для того, чтобы определить вторую координату того же единичного объекта, необходимо вводить второй канал, аналогичный первому, что усложняет устройство больше чем вдвое.
В прототипе определяются две координаты одиночного объекта.
При наличии в поле зрения указанных устройств более одного объекта делает их неработоспособными, поскольку информация от объектов налагается друг на друга и неизвестно какого объекта определяются координаты.
Как известно, анализатор изображения координатора /иногда его называют модулирующим диском, модулирующей диафрагмой, растром и т.п./ размещают в фокальной плоскости приемного объектива, а за ним в непосредственной близости к нему - конденсор. Такое размещение этих оптических элементов приводит к увеличению поперечных габаритов и ориентировочным расчетам фокусирующей системы /см. Л.З. Криксунов, "Справочник по основам инфракрасной техники", М., изд-во "Советское радио", 1978, стр. 195/. В таких устройствах желательно было бы, чтобы и конденсор находился в фокальной плоскости объектива. В предлагаемом устройстве этот вопрос решается выполнением оптического узла, в котором и анализатор изображения и конденсор находятся в фокальной плоскости приемного объектива. За счет этого упрощается устройство.
Таким образом, предлагаемое устройство может определять координаты группы целей, а по своему исполнению гораздо проще известных подобных устройств.
Данное техническое решение отличается от всех существующих новой совокупностью признаков, которые взаимосвязаны между собой, необходимы и достаточны для обеспечения поставленной задачи. На основании изложенного заявляемое техническое решение соответствует критерию "существенные отличия".
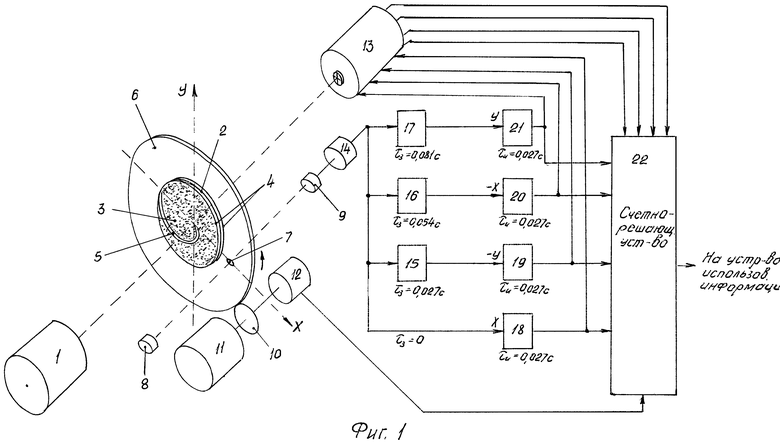
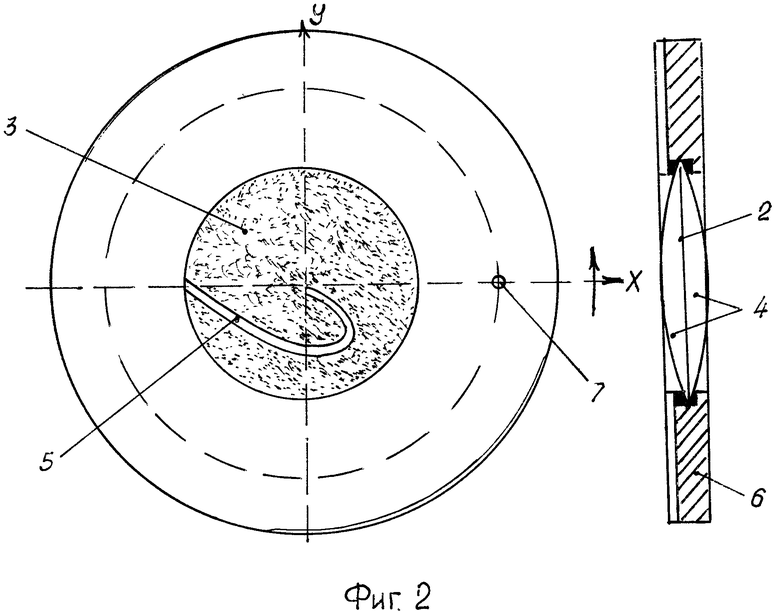
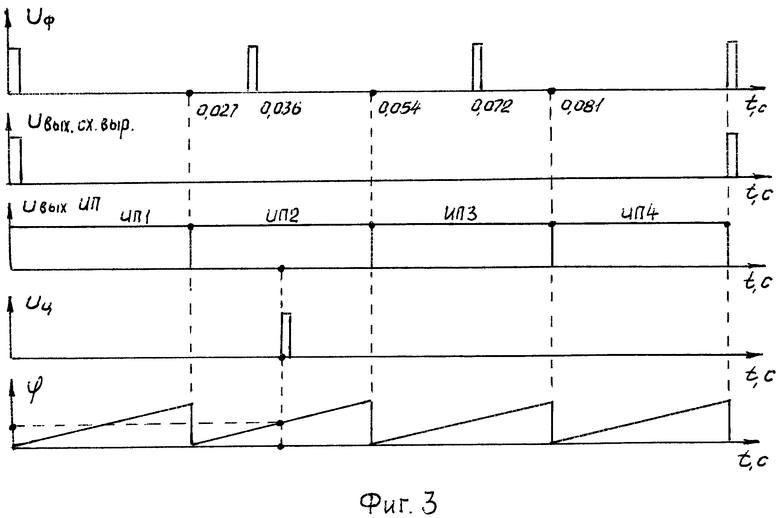
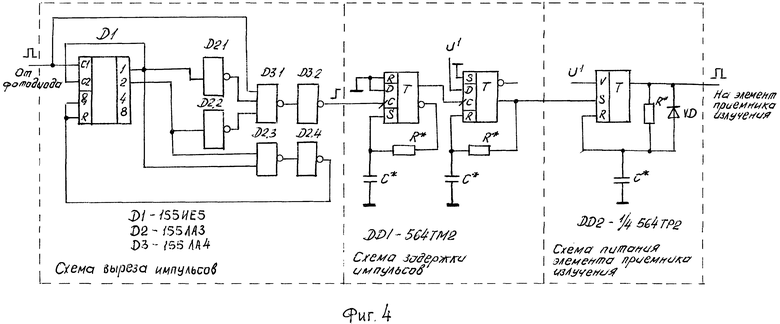
На фиг. 1 представлена блок-схема предлагаемого координатора, на фиг. 2 - оптический узел с держателем, на фиг. 3 - эпюры сигналов, а на фиг. 4 представлены варианты выполнения схемы задержки и схемы питания элемента приемника излучения.
В состав предлагаемого устройства /см. фиг. 1/ входит приемный объектив 1, в фокальной плоскости которого размещена главная плоскость 2 оптического узла 3, состоящего из двух плоско-выпуклых одинаковых по радиусу оптически сопряженных и жестко связанных между собой линз 4. На внутренней стороне одной из них по всей ее площади нанесено покрытие из непрозрачного для видимого и инфракрасного излучений материала. В покрытии сделан вырез 5 в виде узкой щели /шириной 200÷250 мкм/, выполненной по спирали Архимеда. Вырез 5 начинается с оптической оси устройства и, пересекая ось - Y, кончается на оси - X, в точке максимального радиуса оптического узла 3, т.е. вырез 5 сделан на 180°. Держатель 6 оптического узла имеет по оси Х синхронизирующее отверстие 7, которое расположено на расстоянии, большем, чем максимальный радиус оптического узла 3. С одной стороны держателя 6 напротив синхронизирующего отверстия 7 расположен светодиод 8, а с другой стороны фотодиод 9. Оптическая ось светодиод 8 - фотодиод 9 параллельна оптической оси устройства. Держатель 6 через редуктор 10 подключен к исполнительному электродвигателю 11. На входной оси редуктора 10 расположен оптико-механический датчик углового положения 12.
После оптического узла 3 на оптической оси устройства расположен четырехэлементный квадрантный приемник лучистой энергии 13. Выход фотодиода 9 подключен через схему выреза импульсов 14 и линии задержки 15, 16, 17 к входам источников питания 19, 20, 21 кроме источника питания 18 первого квадранта, подключенного непосредственно. Выходы источников питания 18, 19, 20 и 21 соединены соответственно с питающими входами четырехэлементного квадрантного приемника лучистой энергии 13, сигнальные выходы которого поступают на счетно-решающее устройство 22. Три выхода линий задержек 15, 16, 17 и выход фотодиода 9 также поступают на счетно-решающее устройство 22, девятый вход которого связан с оптико-механическим датчиком углового положения 12.
Предлагаемый координатор работает следующим образом.
Излучение от малоразмерных объектов излучения через приемный объектив 1 и оптический узел 3 попадает на четырехэлементный квадрантный приемник лучистой энергии 13. Держатель 6 /вместе с оптическим узлом 3/ вращается против часовой стрелки и производит по квадрантам декартовой системы координат анализ пространства излучения, которое находится в поле зрения приемного объектива 1.
В исходном положении синхронизирующее отверстие 7 находится на оптической оси светодиод 8 - фотодиод 9. В данный момент на вход источника питания 18, а через линии задержек 15, 16, 17 на входы источников питания 19, 20, 21 поступают со схемы выреза импульсов 14 сигналы их последовательного запуска. Напряжение питания с блоков питания 18, 19, 20, 21 поступают соответственно:
- на 1-й элемент /находящийся в 1-м квадранте/;
- на 2-й элемент /находящийся в 4-м квадранте/;
- на 3-й элемент /находящийся в 3-м квадранте/;
- на 4-й элемент /находящийся во 2-м квадранте/;
и снова на 1-й элемент /находящийся в 1-м квадранте/.
В момент подачи напряжения питания на элемент приемника излучения производится поиск целей в данном квадранте. Вырез 5, при повороте его на 270°, полностью проанализирует данный квадрант. Начальным положением для анализа одного полного кадра является положение, когда синхронизирующее отверстие 7 находится на оси X. В этом случае с выхода фотодиода 9 поступает импульс запуска на блок питания 18 непосредственно, а на блоки питания 19, 20, 21 через линии задержки 15, 16, 17, а также непосредственно и после линий задержки 15, 16, 17 на счетно-решающее устройство 22.
Когда вырез 5, при вращении держателя 6 оптического узла, пересекает объект излучения, то с соответствующего элемента приемника лучистой энергии 13 на счетно-решающее устройство 22 поступает электрический сигнал. Одновременно с ним на счетно-решающее устройство 22 с выхода оптико-механического датчика угловых положений 12 поступает сигнал, соответствующий угловому повороту держателя 6 от начального положения.
При рассмотрении трех аналогов указывалось, что все эти устройства определяют только одну координату объекта. Чтобы определить вторую, необходимо ввести еще устройство аналогичное первому. В этом случае вес и габариты устройства возрастают вдвое, усложняется оптическая схема.
В устройствах подобных предложенному, использующих одноэлементный и квадрантный приемники лучистой энергии, как правило, определяют координаты только единичной цели. Подобным устройством является прототип /см. также дополнительно патенты США №4020340, №4021007, №4131254, патенты ФРГ №2414419, №2918858, патент Великобритании №1468839/.
В предложенном устройстве определяются декартовы координаты группы объектов при сканировании пространства в одной плоскости, причем сканирование производится в плоскости, перпендикулярной оптической оси устройства. Поскольку оптический узел вращается в этой плоскости, то он не вызывает астигматизма в изображении точечного источника излучения, не вносит увеличения пятна остаточных аббераций, не создает модулированных помех, накладывающихся на изображение объектов. Отсутствие этих эффектов не увеличивает кружка рассеяния, что приводит к повышению точности определения координат, поскольку можно уменьшить ширину щели, спирали Архимеда, тем самым повысить точность определения координат объектов.
Оптический узел предложенного устройства прост по своей конструкции, имеет небольшие габариты и вес, движение его непрерывно и стабильно, для его вращения применяются двигатели небольшой мощности. Эти преимущества приводят к существенному упрощению устройства в целом.
Предложенное устройство определяет координаты группы объектов, находящихся в угле поля зрения приемного объектива, разделенных между собой пространством, равным одному мгновенному углу поля зрения устройства, определяемому шириной спирали Архимеда, причем в каждый данный момент в участок спирали Архимеда рабочего квадранта приемника излучения попадает только один объект.
В предложенном устройстве схемы задержки выполнены на трех микросхемах 564ТМ2, а схема питания элементов приемника излучения на одной микросхеме 564ТР2 /см. Е.А. Зельдин, "Цифровые интегральные микросхемы в информационно-измерительной аппаратуре", Л., изд-во "Энергоатомиздат", 1986, стр. 266-273.
В предложенном устройстве применен фотоэлектрический преобразователь типа ОЭПМК-16 /см. "Фотоэлектрический преобразователи информации", М., изд-во "Машиностроение", 1974, стр. 367/. С выхода ОЭПМК-16 поступает натуральный двоичный параллельный код, характеризующий угол поворота вала анализатора изображения. Цифровой код находится в линейной зависимости от угла поворота вала. Код поступает на счетно-решающее устройство, которым является ЭВМ. На ЭВМ поступают импульсы непосредственно с выхода фотодиода и выходов линий задержек. В момент прихода на ЭВМ импульса цели, выдаются его координаты. Зная по коду в каждый данный момент угол поворота вала φ определяют его полярный радиус r=aφ, где a - постоянная. Полярные координаты φ и r далее преобразуют в декартовые координаты X=r·cosφ=aφcosφ и y=r·sinφ=aφsinφ. ЭВМ в пределах своего разрешения может обрабатывать большое количество целей.
В качестве ЭВМ можно применить К1-20, К1-30, ДВК-2М, ЕС1840 или любую другую, функциональные возможности которой позволяют проделать вышеописанные операции. См: "Микропроцессорные средства и системы", М., №4, 1986, стр. 7, 15.
Пара светодиод-фотодиод выполнена соответственно на АЛ107Б и ФД-256.
В качестве исполнительного электродвигателя используется ДАДЧ-60-12.
В качестве приемника лучистой энергии является ФР-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1989 |
|
SU1841038A1 |
| КООРДИНАТОР | 1988 |
|
SU1841028A1 |
| КООРДИНАТОР | 1989 |
|
SU1841034A2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1988 |
|
SU1841031A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1987 |
|
SU1841058A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 1998 |
|
RU2138003C1 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА НАВЕДЕНИЯ АВИАЦИОННОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ШИРОКОПОЛОСНЫМ ФОТОПРИЕМНИКОМ | 2004 |
|
RU2280228C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2180090C2 |
| Трехкоординатное оптическое устройство | 1978 |
|
SU771464A1 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА | 1986 |
|
SU1841052A1 |
Изобретение предназначено для использования в области пеленгационных средств и приборов управления. Достигаемый технический результат - повышение точности определения координат. Указанный результат достигается за счет того, что координатор содержит установленные на оптической оси приемный объектив, анализатор изображения с держателем, в котором выполнено сквозное отверстие, конденсор, четырехэлементный квадрантный фотоприемник, светодиод, фотодиод, исполнительный двигатель, блок определения координат, при этом анализатор изображения и конденсор выполнены единым оптическим узлом в виде двух линз, плоскость соединения которых расположена в фокальной плоскости приемного объектива, на внутреннюю поверхность одной из линз нанесено непрозрачное в видимой и инфракрасной области покрытие, содержит также блок формирования кадровых импульсов синхронизации, три линии задержки, четыре источника питания, оптико-механический датчик углового положения, установленный на оси редуктора. Перечисленные средства выполнены и соединены между собой определенным образом. 4 ил.
Координатор, содержащий последовательно установленные на оптической оси приемный объектив, анализатор изображения с держателем, в котором выполнено сквозное отверстие, конденсор и четырехэлементный квадрантный фотоприемник, а также установленные с разных сторон анализатора изображения на оси сквозного отверстия в держателе светодиод и фотодиод, исполнительный двигатель, механически связанный через редуктор с держателем, блок определения координат, отличающийся тем, что, с целью повышения точности определения координат, в нем анализатор изображения и конденсор выполнены единым оптическим узлом в виде двух одинаковых по диаметру плосковыпуклых и жестко соединенных между собой плоскими поверхностями линз, плоскость соединения которых расположена в фокальной плоскости приемного объектива, на внутреннюю поверхность одной из линз нанесено непрозрачное в видимой и инфракрасной области покрытие, в которой выполнена щель в виде спирали Архимеда с началом на оптической оси и окончанием на горизонтальной оси в точке максимального радиуса линз оптического узла, а также введены блок формирования кадровых импульсов синхронизации, вход которого соединен с выходом фотодиода, последовательно соединенная первая линия задержки и первый источник питания, вторая линия задержки и второй источник питания, третья линия задержки и третий источник питания, четвертый источник питания и оптико-механический датчик углового положения, установленный на оси редуктора, причем выход блока формирования кадровых импульсов синхронизации соединен со входами первой, второй и третьей линий задержки и четвертого источника питания, выходы первого, второго, третьего и четвертого источников питания соединены соответственно с первым, вторым, третьим и четвертым входами блока определения координат, пятый, шестой, седьмой, восьмой и девятый входы которого соединены, соответственно, с первым, вторым, третьим и четвертым выходами четырехэлементного квадрантного фотоприемника и с выходом оптико-механического датчика углового положения, выходы первого, второго, третьего и четвертого источников питания дополнительно соединены с первым, вторым, третьим и четвертым входами четырехэлементного квадрантного фотоприемника, а сквозное отверстие в держателе расположено на горизонтальной оси.
| В.В | |||
| Козелкин и И.Р | |||
| Усольцев | |||
| Основы инфракрасной техники | |||
| М., Машиностроение, 1974, с.236-238 | |||
| М.М | |||
| Мирошников | |||
| Теоретические основы оптико-электронных приборов | |||
| Л., Машиностроение, Ленинградское отделение, 1983, с.151 |

