Предлагаемое изобретение относится к области пеленгационных средств и приборов управления и может быть использовано при разработке систем обнаружения малоразмерных целей и определения их координат в инфракрасной области спектра излучения и является усовершенствованием известного устройства, описанного в авт. свид. № 1841006 (заявка №3190245/07 от 26.01.1988 г.).
В основном изобретении по авт. свид. № 1841006 описан координатор, который используется в системах, работающих в пассивном режиме работы в ИК диапазоне волн излучения.
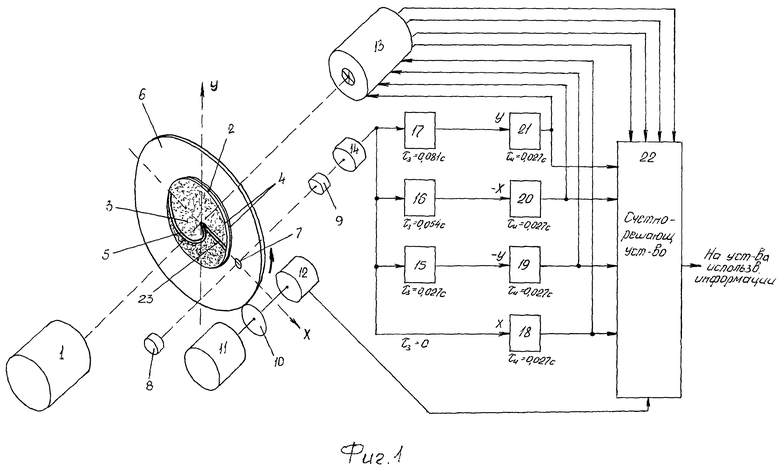
В состав этого устройства (см. фиг. 1) входит приемный объектив 1, в фокальной плоскости которого размещена главная плоскость 2 оптического узла 3, состоящего из двух плоско-выпуклых одинаковых по радиусу оптически сопряженных и жестко связанных между собой линз 4. На внутренней стороне одной из них по всей ее площади нанесено покрытие из непрозрачного для видимого и инфракрасного излучений материала. В покрытии сделан вырез 5 в виде узкой щели (шириной 200-250 мкм), выполненной по спирали Архимеда. Вырез 5 начинается с оптической оси устройства и, пересекая ось y, кончается на оси x, в точке максимального радиуса оптического узла 3, т.е. вырез 5 сделан на 180°. Держатель 6 оптического узла имеет по оси x синхронизирующее отверстие 7, которое расположено на расстоянии, большем, чем максимальный радиус оптического узла 3. С одной стороны держателя 6 напротив синхронизирующего отверстия 7 расположен светодиод 8, а с другой стороны фотодиод 9. Оптическая ось светодиод 8 - фотодиод 9 параллельна оптической оси устройства. Держатель 6 через редуктор 10 подключен к исполнительному электродвигателю 11. На входной оси редуктора 10 расположен оптико-механический датчик углового положения 12.
После оптического узла 3 на оптической оси устройства расположен четырехэлементный квадрантный приемник лучистой энергии 13. Выход фотодиода 9 подключен через схему выреза импульсов 14 и линии задержки 15, 16, 17 к выходам источников питания 19, 20, 21, кроме источника питания 18 первого квадранта, подключенного непосредственно. Выходы источников питания 18, 19, 20 и 21 соединены соответственно с питающими входами четырехэлементного квадрантного приемника лучистой энергии 13, сигнальные выходы которого поступают на счетно-решающее устройство 22. Три выхода линий задержек 15, 16, 17 и выход фотодиода 9 также поступают на счетно-решающее устройство 22, девятый вход которого связан с оптико-механическим датчиком углового положения 12.
Работает координатор следующим образом.
Излучение от малоразмерных объектов излучения через приемный объектив 1 и оптический узел 3 попадает на четырехэлементный квадрантный приемник лучистой энергии 13. Держатель 6 (вместе с оптическим узлом 3) вращается против часовой стрелки и производит по квадрантам декартовой системы координат анализ пространства излучения, которое находится в поле зрения приемного объектива 1.
В исходном положении синхронизирующее отверстие 7 находится на оптической оси светодиод 8 - фотодиод 9. В данный момент на вход источника питания 13, а через линии задержек 15, 16, 17 на входы источников питания 19, 20, 21 поступают со схемы выреза импульсов 14 сигналы их последовательного запуска. Напряжение питания с блоков питания 18, 19, 20, 21 поступает соответственно:
- на 1 элемент (находящийся в 1 квадранте);
- на 2 элемент (находящийся в 4 квадранте);
- на 3 элемент (находящийся в 3 квадранте);
- на 4 элемент (находящийся во 2 квадранте)
и снова на 1 элемент, находящийся в 1 квадранте.
В момент подачи напряжения питания на элемент приемника излучения производится поиск целей в данном квадранте. Вырез 5, при повороте его на 270°, плоскостью анализирует данный квадрант. Начальным положением для анализа одного полного кадра является положение, когда синхронизирующее отверстие 7 находится на оси x. В этом случае с выхода фотодиода 9 поступает импульс запуска на блок питания 18 непосредственно, а на блоки питания 19, 20, 21 через линии задержки 15, 16, 17, а также непосредственно и после линий задержки 15, 16, 17 на счетно-решающее устройство 22.
Когда вырез 5, при вращении держателя 6 оптического узла, пересекает объект излучения, то с соответствующего элемента приемника лучистой энергии 13 на счетно-решающее устройство 22 поступает электрический сигнал. Одновременно с ним на счетно-решающее устройство 22 с выхода оптико-механического датчика угловых положений 12 поступает сигнал, соответствующий угловому повороту держателя 6 от начального положения.
Недостатком данного устройства является то, что оно может определить координаты только одной цели, находящейся в пределах участка цели рабочего квадранта.
Целью дополнительного изобретения является определение координат группы целей.
Поставленная цель достигается за счет того, что в координаторе по авт. свид. № 1841006 (заявка №3190245/07) линза оптического узла имеет вторую щель с началом на оптической оси и окончанием на оси x в точке максимального радиуса линзы и равную ширине первой щели.
Предлагаемый координатор существенно отличается по своим функциональным возможностям по сравнению с известными устройствами подобного типа. Он может определять координаты группы целей, находящихся в поле зрения щели выполненной по спирали Архимеда.
Данное техническое решение отличается от всех существующих новой совокупностью признаков, которые взаимосвязаны между собой, необходимы и достаточны для обеспечения поставленной задачи. На основании изложенного заявляемое техническое решение соответствует критерию ″существенные отличия″.
На фиг. 1 представлена блок-схема предлагаемого координатора.
В состав предложенного устройства (см. фиг. 1) входит приемный объектив 1, в фокальной плоскости которого размещена главная плоскость 2 оптического узла 3, состоящего из двух плоско-выпуклых одинаковых по радиусу оптически сопряженных и жестко связанных между собой линз 4. На внутренней стороне одной из них по всей ее площади нанесено покрытие из не прозрачного для видимого и инфракрасного излучений материала. В покрытии сделан вырез 5 в виде узкой щели выполненной по спирали Архимеда, и вырез 23 в виде узкой прямолинейной щели, выполненной по радиусу линзы 4. Вырез 5 начинается с оптической оси устройства и, пересекая ось y, кончается на оси x, в точке максимального радиуса линзы 4, т.е. вырез 5 сделан на 180°. Вырез 23 начинается с оптической оси устройства и, продолжаясь по оси x, оканчивается в точке максимального радиуса линзы 4. Ширина щелей 200-250 мкм. Держатель 6 оптического узла имеет по оси x синхронизирующее отверстие 7, которое расположено на расстоянии, большем, чем максимальный радиус оптического узла 3. С одной стороны держателя 6 напротив синхронизирующего отверстия 7 расположен светодиод 8, а с другой стороны фотодиод 9. Оптическая ось светодиод 8 - фотодиод 9 параллельна оптической оси устройства. Держатель 6 через редуктор 10 подключен к исполнительному электродвигателю 11. На входной оси редуктора 10 расположен оптико-механический датчик углового положения 12.
После оптического угла 3 на оптической оси устройства расположен четырехэлементный квадрантный приемник лучистой энергии 13. Выход фотодиода 9 подключен через схему выреза импульсов 14 и линии задержки 15, 16, 17 к входам источников питания 19, 20, 21 кроме источника питания 18 первого квадранта, подключенного непосредственно. Выходы источников питания 18, 19, 20, 21 соединены соответственно с питающими входами четырехэлементного квадрантного приемника лучистой энергии 13, сигнальные выходы которого поступают на счетно-решающее устройство 22. Три выхода линий задержек 15, 16, 17 и выход фотодиода 9 также поступают на счетно-решающее устройство 22, девятый вход которого связан с оптико-механическим датчиком углового положения 12.
Работает координатор следующим образом.
Излучение от малоразмерных целей излучения через приемный объектив 1 и оптический узел 3 попадает на четырехэлементный квадрантный приемник лучистой энергии 13. Держатель 6 (вместе с оптическим узлом 3) - вращающийся против часовой стрелки и производит по квадрантам анализ пространства излучения, которое находится в поле зрения приемного объектива 1.
В исходном положении синхронизирующее отверстие 7 находится на оптической оси светодиод 8 - фотодиод 9. В данный момент на вход источника питания 13, а через линии задержки 15, 16, 17 - на входы источников питания 19, 20, 21, поступают со схемы выреза импульсов 14 сигналы их последовательного запуска. Напряжение питания с блоков питания 18, 19, 20, 21 поступает соответственно:
- на 1 элемент (находящийся в 1 квадранте);
- на 2 элемент (находящийся в 4 квадранте);
- на 3 элемент (находящийся в 3 квадранте);
- на 4 элемент (находящийся во 2 квадранте)
и снова на 1 элемент, находящийся в 1 квадранте.
В момент подачи напряжения питания на элемент приемника излучения производится поиск целей в данном квадранте. При повороте оптического узла 3 на 270° полностью проанализируется данный квадрант. Начальным положением является положение, когда синхронизирующее отверстие 7 находится на оси x. В этом случае с выхода фотодиода 9 поступает импульс запуска на блок питания 18 непосредственно, а на блоки питания 19, 20, 21 через линии задержки 15, 16, 17, а также непосредственно и после линий задержки 15, 16, 17 на счетно-решающее устройство 22.
При вращении оптического узла 3 щель 23, выполненная по радиусу, первой последовательно пересекает цели, находящиеся на разных радиусах. Информация о радиусах, на которых имеются цели, а соответственно и их полярных углах, запоминается в счетно-решающем устройстве 22. За щелью 23 следует щель 5, выполненная в виде спирали Архимеда. Щель 5 определяет полярные радиусы целей.
Если в щели, выполненной по спирали Архимеда, имеется несколько целей, то, зная их полярные углы и само положение щели в рабочем квадранте, счетно-решающее устройство выдает полярные радиусы всех целей, находящихся одновременно в щели, выполненной по спирали Архимеда.
Определение координат может производиться в контроллерах типа К1-30, ДВК-2М, ЕС1840 и других (см. прототип).
В этом случае алгоритм работы устройства следующий.
Задача сводится к определению полярных координат цели.
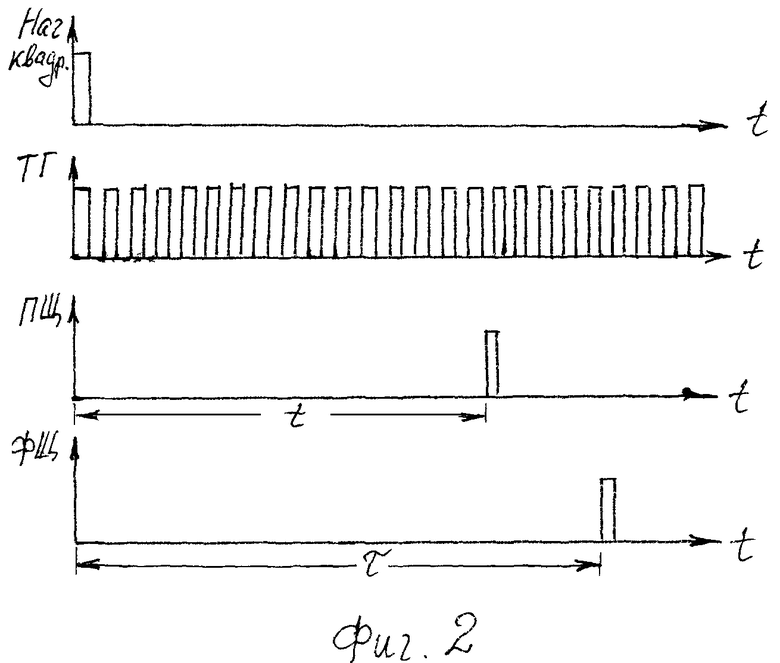
Реально получаем временные интервалы между импульсом начала просмотра квадранта и сигналами с прямой щели (ПЩ) и фигурной щели (ФЩ). Ниже приведены диаграммы работы устройства. См. фиг. 2.
Время t прямым образом определяет угол φ, т.е. t тождественно φ. Зная время τ, можно определить полярный радиус r. Для этого надо определить
T=τ-t-τо,
где τо - временный сдвиг между ПЩ и ФЩ.
Время Т тождественно радиусу r.
Система обработки должна обеспечивать:
- определение t;
- определение τ;
- определение T.
Кроме того, необходимо запоминать вышеуказанные параметры.
При существовании нескольких целей надо для соответствующих ti установить соответствующие Ti.
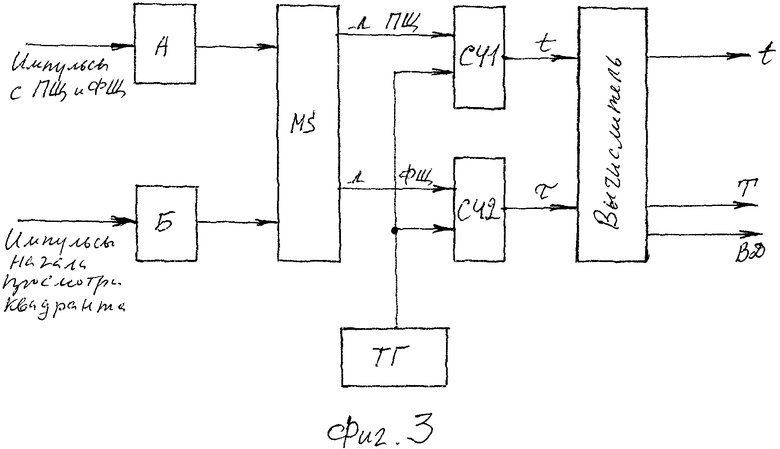
Схема согласования с вычислителем следующая, т.е. схема счетно-решающего устройства: см. фиг. 3,
где А - усилитель сигналов ПЩ и ФЩ;
Б - линия задержки, время задержки которой равно τо;
ТГ - тактовый генератор;
MS - мультиплексор;
СЧ1 и СЧ2 - счетчики импульсов.
Сигналы с квадранта проходят через блок А и поступают на мультиплексор MS. Управляющим сигналом для MS является сигнал с линии задержки Б. MS пропускает на выход сигнала сигналы от ПЩ, а затем от ФЩ. Сигналы ПЩ и ФЩ останавливают (или стробируют) соответственно счетчики СЧ1 и СЧ2. Данные счетчиков являются параметрами t и τ, которые поступают на вход вычислителя. Таким образом, алгоритм работы вычислителя следующий: запоминание t, τ; вычисление Т, выдача данных во внешнюю схему; ВД - сигнал стробирования ″Выдача данных″.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1989 |
|
SU1841038A1 |
| КООРДИНАТОР | 1988 |
|
SU1841006A1 |
| КООРДИНАТОР | 1988 |
|
SU1841028A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 1998 |
|
RU2138003C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1988 |
|
SU1841092A2 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА НАВЕДЕНИЯ АВИАЦИОННОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ШИРОКОПОЛОСНЫМ ФОТОПРИЕМНИКОМ | 2004 |
|
RU2280228C1 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА | 1986 |
|
SU1841052A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1988 |
|
SU1841031A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2180090C2 |
Изобретение относится к области пеленгационных средств и может быть использовано в системах обнаружения малоразмерных целей в инфракрасной области спектра. Достигаемый технический результат - определение координат группы целей. Указанный результат достигается за счет того, что в координаторе - в линзовом блоке оптического узла выполнена вторая щель, расположенная по радиусу линзового блока, кроме того, координатор дополнительно содержит четырехканальный блок счета импульсов, каждый из каналов которого выполнен в виде усилителя, линии задержки, мультиплексора, входы которого соединены с выходами усилителя и линии задержки, и двух счетчиков, первые входы которых соединены с выходами мультиплексора, а вторые - с выходом тактового генератора, при этом выходы счетчиков всех каналов, являющиеся выходами счета импульсов, соединены с восемью входами блока определения координат, вход усилителя каждого канала блока счета импульсов соединен с выходом соответствующего чувствительного элемента четырехэлементного квадрантного фотоприемника, а вход линии задержки каждого канала соединен с выходом соответствующего источника питания. 3 ил.
Координатор по авт. свид. СССР №1841006, отличающийся тем, что, с целью определения координат группы целей, одновременно находящихся в мгновенном поле зрения, в линзовом блоке оптического узла выполнена вторая щель, расположенная по радиусу линзового блока, ширина которой равна ширине первой щели, причем начало второй щели совпадает с оптической осью оптического узла, ее конец совпадает с точкой максимального радиуса линзового блока, расположенной диаметрально противоположно точке окончания первой щели, а также введен четырехканальный блок счета импульсов, каждый из каналов которого выполнен в виде усилителя, линии задержки, мультиплексора, входы которого соединены соответственно с выходами усилителя и линии задержки, и двух счетчиков, первые входы которых соединены с выходами мультиплексора, а вторые - с выходом введенного тактового генератора, при этом выходы счетчиков всех каналов, являющиеся выходами блока счета импульсов, соединены соответственно с восемью входами блока определения координат, вход усилителя каждого канала блока счета импульсов соединен с выходом соответствующего чувствительного элемента четырехэлементного квадрантного фотоприемника, а вход линии задержки каждого канала соединен с выходом соответствующего источника питания.
| Авторское свид | |||
| КООРДИНАТОР | 1988 |
|
SU1841006A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

