Предлагаемое изобретение относится к области измерений геометрических признаков (горизонтальный, вертикальный, угловой или средний размер) контура свободноплавающих малоразмерных объектов (мро*) (* Свободноплавающий мро - это любой малоразмерный неживой объект без движителя, например, буй, бочка, мина, полузатонувшие бревно или шлюпка и др.) и может быть использовано в системах распознавания объектов в условиях реальной свободной поверхности моря, а также для различных научных исследований свободной поверхности моря.
Известны способы распознавания свободноплавающих объектов, в том числе:
1. Радиолокационные, реализующие различия в спектрах отраженных сигналов [1, (с. 11)] или основанные на измерении путевой скорости [1, (c. 32)].
2. Оптико-электронные, основанные на исследовании отраженного объектом излучения [2, (с. 50)] или анализе и сравнении изображений объекта [2, (с. 70)], реализующие методы контурного и портретного распознавания.
Способы первого типа применяют для распознавания типа целей, но для решения задач индивидуального распознавания МРО в условиях возмущенной свободной поверхности они не применимы, поскольку размеры мро соизмеримы с элементом разрешения распознавающей системы.
Способы второго типа применяют только тогда, когда есть возможность получить полное описание портрета предъявленного объекта или когда различают заданный геометрический признак контура распознаваемого объекта.
При этом следует отметить, что для реализации указанных способов необходимо, чтобы величины выбранных геометрических признаков объекта превышали заданную величину, что сразу же накладывает ограничения по диапазону дальности распознавания.
По своему функциональному назначению наиболее близким к предлагаемому является способ контурного распознавания, так как он основан на измерении мгновенных значений заданных геометрических признаков необходимых объектов [3]. Измерение мгновенных значений геометрических характеристик объемных (″выпуклых″) объектов осуществляют в данном способе базово-корреляционным методом в оптическом диапазоне длин волн путем преобразование образа объекта в виде пространственной корреляционной функции рассеянного света и последующего восстановления методом голограмм интенсивности прямым преобразованием Фурье. Этот способ распознавания позволяет судить о размерах и форме лишь центральной части освещенной поверхности объекта, причем оценка геометрических характеристик производится с неконтролируемой погрешностью, зависящей от кривизны поверхности объекта. Для реализации описанного способа необходимо наличие, кроме устройств индикации, обработки и т.п., источника линейно-поляризованного когерентного света и N разнесенных в пространстве двухканальных приемников.
Кроме указанных недостатков данный способ имеет также те же недостатки, что и описанные ранее, а именно, неинвариантность признаков распознавания к изменениям внешних физических условий, в частности состояния свободной поверхности моря, ракурса наблюдения и других факторов, вызывающих изменения контура распознаваемого объекта, тем более что реальные объекты имеют неправильную форму и редко равномерную светимость.
Кроме того, следует отметить, что описанные способы не приемлемы при распознавании объектов на предельных дальностях обнаружения, когда любой наблюдаемый объект является малоразмерным или даже точечным.
Целью данного изобретения является обеспечение возможности распознавания (идентификации) свободноплавающих малоразмерных объектов в условиях возмущенной свободной поверхности моря в реальном масштабе времени.
Поставленная цель достигается тем, что в предлагаемом способе распознавания свободноплавающих малоразмерных объектов, основанном на измерении мгновенных значений геометрических признаков объекта, в качестве геометрической характеристики распознавания выбирают визуализируемую ординату объекта, по измеренным мгновенным значениям которой определяют энергетический спектр реакции объекта на возмущающее воздействие взволнованной свободной поверхности моря и запоминают, одновременно в той же акватории морской поверхности измеряют с помощью волномерного датчика мгновенные значения ординат волнового профиля и по полученным значениям определяют энергетический спектр морского волнения и запоминают его, при этом объемы выборок при измерениях мгновенных значений ординат объекта и волнового профиля берут одинаковыми, далее по отношению энергетического спектра реакции объекта к энергетическому спектру морского волнения определяют передаточную функцию взаимодействия гидродинамической системы ″тело - свободная поверхность″, являющуюся статистическим ″портретом″ объекта, после чего оперативно полученную передаточную функцию попарно сравнивают с каждой из заранее запомненных передаточных функций эталонных ″портретов″ свободно-плавающих объектов, далее по признаку непревышения заданного значения чебышевского отклонения измеренной и запомненных передаточных функций производят распознавание или идентификацию объекта.
Данное техническое решение соответствует критерию ″существенные отличия″, так как в предложенном способе впервые ставится вопрос индивидуального распознавания свободноплавающих объектов путем определения передаточных функций взаимодействия гидродинамической системы ″тело - свободная поверхность″ по отношению энергетического спектра реакции объекта на возмущающее воздействие свободной поверхности моря, определяемого по измеренным мгновенным значениям визуализируемых ординат объекта, к энергетическому спектру морского волнения, определяемому по измеренным с помощью волномерного датчика мгновенным значениям ординат волнового профиля, причем объемы выборок при измерении ординат объекта и волнового профиля берут одинаковыми, и сравнения апостериорных (измеренных в данный момент времени), передаточных функций с априорными (ранее измеренным и запомненным) передаточными функциями взаимодействия гидродинамической системы ″тело - свободная поверхность″, являющимися статистическими ″портретами″ объектов, так как каждому объекту принадлежит одна и только одна передаточная функция взаимодействия, параметры которой зависят лишь от характеристик объекта и особенностей его взаимодействия с подстилающей поверхностью моря. Для составления и записи в долговременную память спецпроцессора каталога - классификатора эталонных ″портретов″ наиболее вероятных свободноплавающих объектов, которые могут быть в исследуемой акватории моря и которые последовательно извлекают из долговременной памяти спецпроцессора для сравнения с оперативно определенными передаточными функциями при распознавании путем определения чебышевского отклонения апостериорных и априорных передаточных функций. По признаку непревышения заданного значения чебышевского отклонения относят наблюдаемый объект к одному из предъявляемых из долговременной памяти спецпроцессора для сравнения эталонных статистических ″портретов″.
Все признаки в заявляемом способе порознь известны, но в заявляемой совокупности они не могут рассматриваться отдельно, так как все признаки взаимно и органически связаны, взаимодействуют вместе и обнаруживают в отношениях друг с другом новое свойство - индивидуально распознавать (идентифицировать) свободноплавающие малоразмерные объекты в реальном масштабе времени в условиях возмущенной свободной поверхности моря путем измерения, регистрации и обработки ординат волнового профиля и объекта, флуктуации которого обусловлены воздействием на объект возмущенной свободной поверхности моря.
Подобные технические решения с заявляемой совокупностью признаков авторам и заявителю не известны и поэтому предложение соответствует критериям ″новизна″ и ″существенные отличия″.
Сущность изобретения поясняется чертежами, на которых изображены:
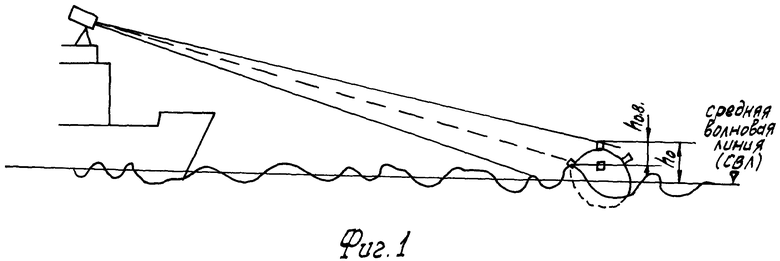
на фиг. 1 - взаимное расположение объекта и инфракрасной лазерной станции (ИКЛС) освещения надводной обстановки;
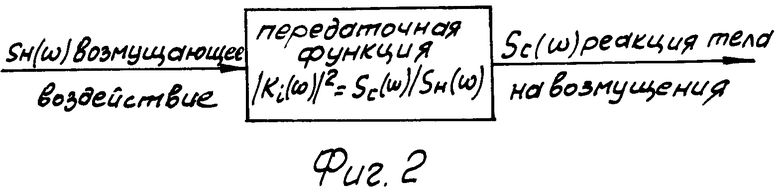
на фиг. 2 - упрощенная схема взаимодействия гидродинамической системы ″тело - свободная поверхность″;
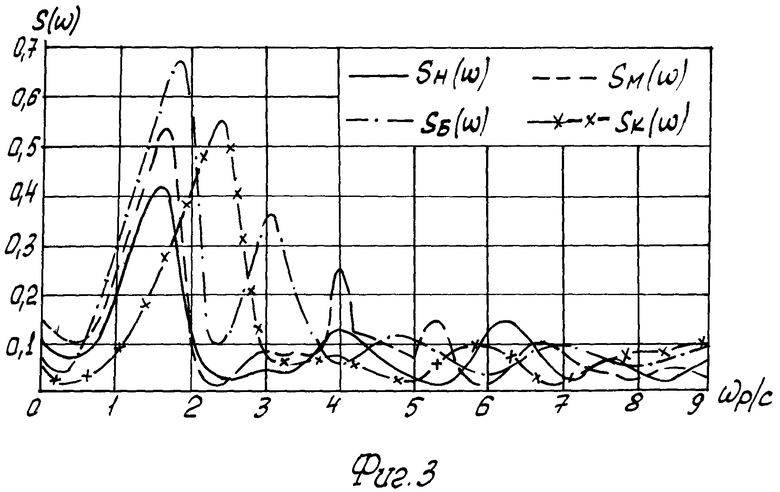
- на фиг. 3 - энергетические спектры случайных процессов H(t)-Sн(ω) и C(t) - для малого Sм(ω) и большого Sб(ω) буев и шлюпки Sк(ω).
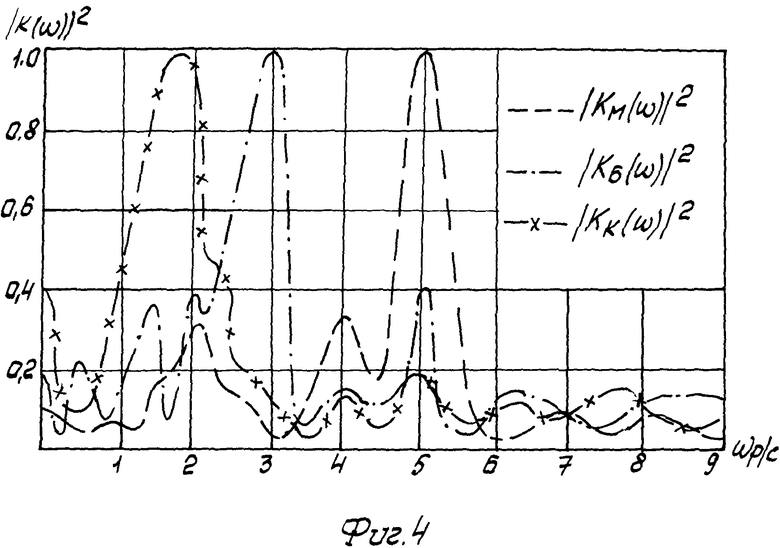
- на фиг. 4 - передаточные функции взаимодействия малого буя |Kм(ω)|2, большого буя |Kб(ω)|2 и шлюпки |Kк(ω)|2 с подстилающей поверхностью;
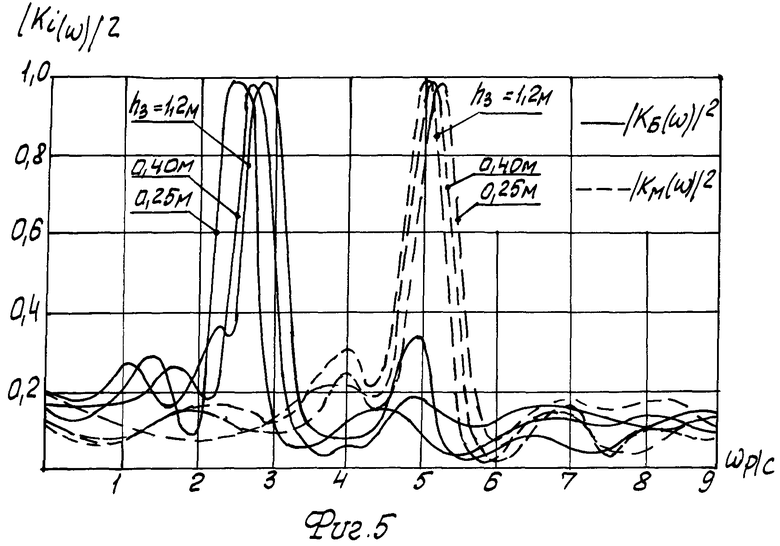
- на фиг. 5 - передаточные функции малого |Kм(ω)|2 и большого |Kб(ω)|2 буев для различных интенсивностей морского волнения;
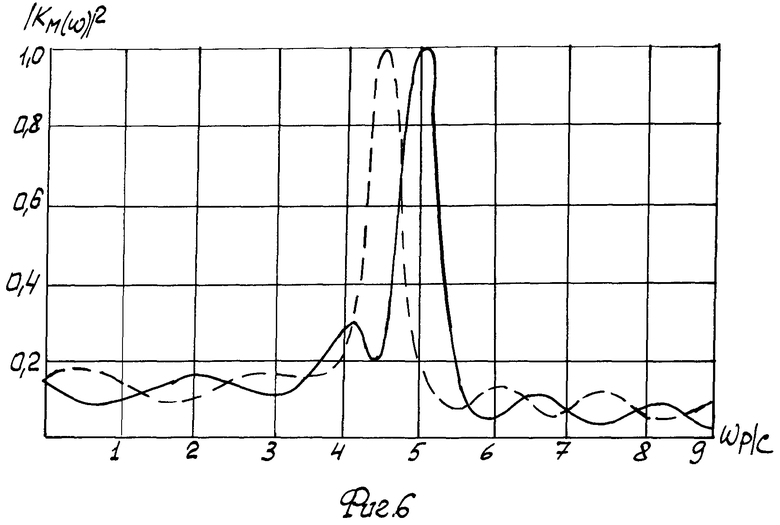
на фиг. 6 - передаточные функции малого буя |Kм(ω)|2, полученные при одинаковой интенсивности волнения в морских условиях (сплошная линия) и в пресноводном водоеме (пунктирная линия);
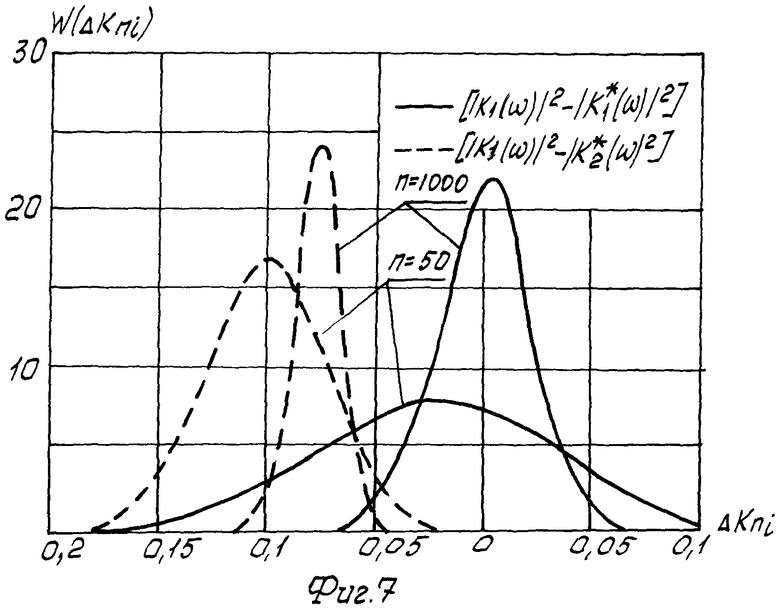
на фиг. 7 - плотности распределения чебышевского отклонения априорных и апостериорных передаточных функций;
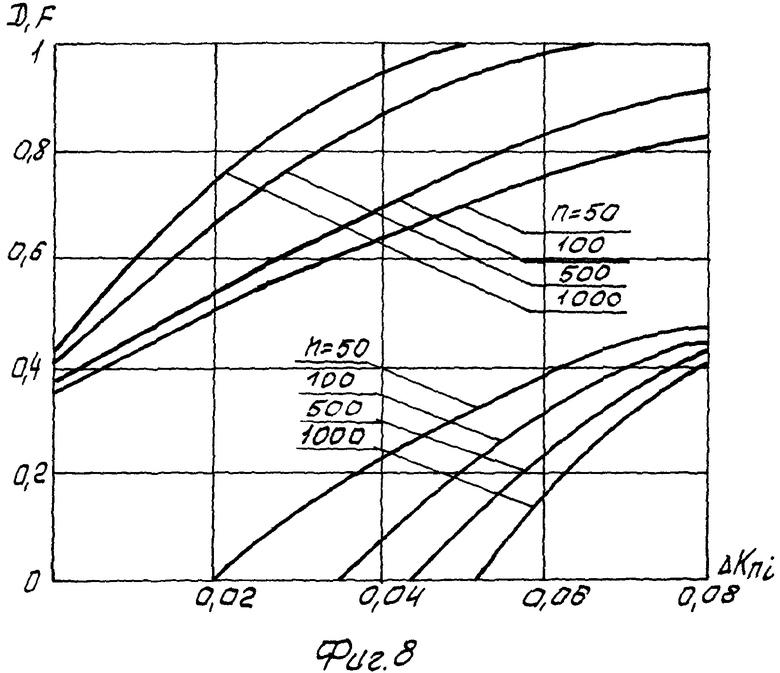
на фиг. 8 - вероятности правильного и ложного индивидуального распознавания;
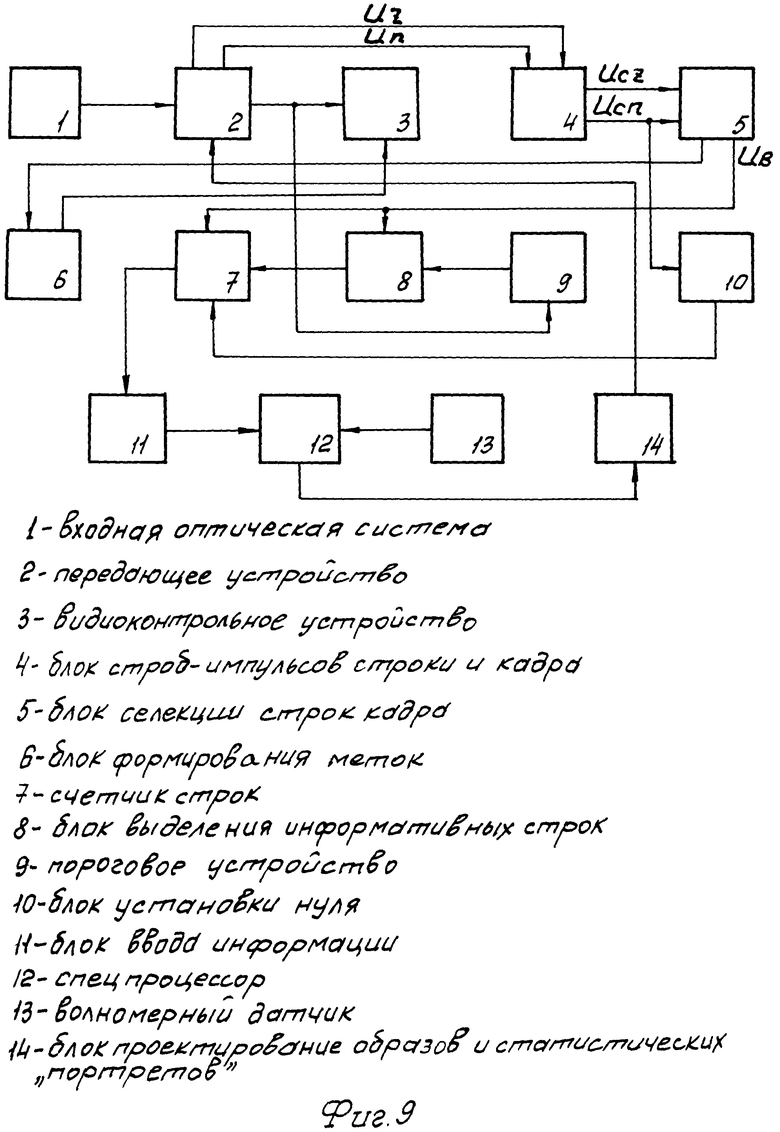
на фиг. 9 - блок-схема устройства, реализующего предлагаемый способ.
Известно, что океан представляет собой чрезвычайно сложную ″колебательную″ систему. Внешние причины, приводящие к появлению тех или иных колебаний также разнообразны - это ветровое воздействие (ветровые волны) и действие сил притяжения Луны и Солнца (приливные волны), отклонение свободной поверхности океана от положения равновесия под действием ветра и атмосферного давления (анемобарические волны), воздействие динамических процессов, протекающих в земной коре (сейсмические волны или цунами), движение кораблей (корабельные волны) и другие причины.
Реально водные массы мирового океана не остаются в покое, а находятся в непрерывном изменении и характеризуются, в основном, возвышением свободной поверхности l(x), полями скорости 


Таким образом, гидрофизическое поле свободной поверхности океана является случайным, каждая конкретная реализация такого поля рассматривается как некий ″представитель″, извлеченный из статистического ансамбля всевозможных полей.
Поэтому основные количественные связи между элементами волн и свободноплавающими малоразмерными телами, рассматривая систему ″тело - свободная поверхность″ как единую гидродинамическую систему [4, (c. 46)], могут быть получены на основе анализа данных специального эксперимента. В качестве геометрического признака объекта при распознавании выбрана визуализируемая ордината (вертикальный размер контура) объекта - hо.в. (см. фиг. 1), изображение которой проектируется на экране видеоконтрольного устройства (ВКУ), например, ИКЛС. Флуктуации мгновенных значений визуализируемой ординаты объекта, которые фиксируют и измеряют с помощью ИКЛС, обусловлены интенсивностью морского волнения и связанного с ним видом и состоянием волнового профиля, а также особенностями гидродинамического взаимодействия объекта с подстилающей поверхностью и реакций его на возмущающее воздействие последней.
При таком подходе волнение моря и реакция тела на него рассматриваются как случайные процессы (СП), к которым приложимы законы статистической связи СП на входе и выходе линейных систем (см. фиг. 2).
В предлагаемом способе на вход такой системы (см. фиг. 2) поступают случайные возмущения свободной поверхности с энергетическим спектром Sн(ω). Спектр реакции объекта на возмущающее воздействие свободной поверхности Sc(ω) связан с энергетическим спектром Sн(ω) соотношением

где 
Известно, что значения энергетических спектров получают путем вычисления прямого преобразования Фурье от нормированных корреляционных функций ρi(τ) случайных колебаний текущих значений ординат объекта и волнового профиля, которые вычисляют в дискретных точках через интервал времени, выбираемый из условия теоремы Котельникова

где τ - временной сдвиг.
Для практических вычислений на спецпроцессоре энергетических спектров морского волнения и реакции объекта по данным натурных измерений мгновенных значений ординат волнового профиля и объекта выражение (2) записывают в виде

где Wп=0·W1, 1·W1, …, [B-1]·W1 - частота энергетического спектра исследуемого случайного процесса;

B - количество дискрет, в которых вычисляют энергетический спектр исследуемого случайного процесса;
W - количество дискретных значения нормированной корреляционной функции на уровне 0, 1;
A[к] - массив ординат нормированной корреляционной функции
где N - размер наблюдаемой реализации исследуемого случайного процесса;
B[I]=|A[Z]-M| - центрированные отсчеты наблюдаемой реализации в дискретные моменты времени;
A[Z] - исходная реализация Z-го случайного процесса (Z:=C, H);
C - случайный процесс реакции объекта на возмущающее воздействие свободной поверхности моря;
H - случайный процесс собственных возмущений свободной поверхности моря;
M1 - математическое ожидание наблюдаемых величин;
B[I+M] - центрированные отсчеты реализации в моменты времени, сдвинутые на M относительно первого ряда отсчетов.
Результаты определения энергетического спектра реакции объекта заносят в оперативную память спецпроцессора в виде массива А0[I] Одновременно в той же акватории производят измерения мгновенных значений ординат волнового профиля свободной поверхности моря с помощью волномерного датчика [5]. По данным измерений определяют энергетический спектр морского волнения по изложенной выше методике. Результаты определения энергетического спектра морского волнения заносят в оперативную память спецпроцессора в виде массива A1[I]. Необходимым условием при этом является то, что объемы выборок массивов A[Z] при измерениях мгновенных значений ординат объекта и волнового профиля берут одинаковыми.
Далее определяют передаточную функцию взаимодействия гидродинамической системы ″тело - свободная поверхность″ - массив A[I]. Для этого берут отношение массивов А0[I] и A1[I], то есть

Массив А[I] последовательно сравнивают попарно с априорными передаточными функциями - статистическими ″портретами″ объектов, ранее полученными в результате дополнительных измерений и занесенных в долговременную память спецпроцессора в виде каталога-классификатора эталонных статистических ″портретов″ наиболее часто встречающихся объектов, для последующего извлечения этих ″портретов″ из долговременной памяти спецпроцессора для сравнения при индивидуальном распознавании свободноплавающих малоразмерных объектов в фиксированной точке исследуемой ограниченной акватории моря.
В качестве критерия распознавания применяют чебышевское отклонение ΔKпi априорной |Kп(ω)|2 и апостериорной |Ki(ω)|2 передаточных функций

где K - число дискрет, которыми представлены передаточные функции;
Kк - оптимальный порог.
В дальнейшем процедуру распознавания сводят к определению чебышевского отклонения и сравнению его с оптимальным порогом и далее по признаку непревышения полученного значения чебышевского отклонения оптимального порога относят наблюдаемый объект по крайней мере к одному из предъявляемых для сравнения эталонных ″портретов″. В случае, если массиву A[I] аналог в долговременной памяти спецпроцессора не обнаружен, то этот массив заносится в каталог-классификатор как не опознанный объект для дальнейших исследований и описания, при возможности, его образа.
Для количественной оценки вероятностных характеристик индивидуального распознавания необходимо знать плотности распределения чебышевского отклонения W(ΔКпi), с помощью которых определяют значения вероятностей правильного D и ложного F распознавания. Для этого по полученным в результате эксперимента реализациям определяют эталонные передаточные функции нескольких объектов, например, малого буя |Kм(ω)|2, большого буя |Kб(ω)|2 и шлюпки |Kк(ω)|2. При этом объем выборки берут одинаковым размером, например порядка 104. Из этих же массивов извлекают ограниченные выборки указанных объектов, по которым получают апостериорные ″портреты″ |Ki(ω)|2 тех же объектов. Затем определяют конкретные значения величин чебышевского отклонения, их плотности распределения W(ΔKпi) и оптимальные пороги, сравнивают эти распределения с порогом и принимают соответствующие решения, по которым вычисляют вероятности D и F.
На фиг. 3 приведены графики энергетических спектров СП H(t)-Sн(ω) и С(t)-Sм(ω) для малого и Sб(ω) для большого буев и Sк(ω) для шлюпки. Из анализа графиков фиг. 3 видно, что все энергетические спектры отличаются между собой и, в принципе, их можно было бы использовать для распознавания. Однако изменения внешних физических условий вызывают деформации формы энергетических спектров, что, в свою очередь, приводит к появлению пересекающихся и изменяющихся во времени признаков распознавания. Поэтому с точки зрения распознавания в условиях реальной свободной поверхности моря свободноплавающих малоразмерных объектов применение энергетических спектров флюктуаций визуализируемых ординат объектов нецелесообразно.
На фиг. 4 приведены графики передаточных функций взаимодействия тех же объектов со свободной поверхностью моря, полученные по результатам экспериментальных исследований при фиксированной интенсивности морского волнения. На фиг. 5 приведены графики передаточных функций взаимодействия большого |Kб(ω)|2 и малого |Kм(ω)|2 буев при различных интенсивностях морского волнения:
2 балла (h3%=0,25 м); 3 балла (h3%=0,4 м) и 4 балла (h3%=1,2 м).
На фиг. 6 приведены передаточные функции взаимодействия малого буя |Kм(ω)|2 для жидких сред с различными плотностями при одинаковых интенсивностях волнения свободной поверхности (сплошная линия - в условиях моря и пунктирная линия в условиях пресного водоема), а на фиг. 7 плотности распределения чебышевского отклонения априорных и апостериорных передаточных функций.
Из анализа графиков фиг. 5 видно, что каждый распознаваемый объект имеет одну, только ему присущую передаточную функцию, частота, форма и другие характеристики которой зависит от параметров самого объекта и являются почти нечувствительными к случайным изменениям интенсивности воздействия на объект возмущенной свободной поверхности моря. Частоты передаточных функций (фиг. 4 и 5) распознаваемых объектов с увеличением массы объекта уменьшается и их значения не соответствуют значениям частот энергетических спектров тех же объектов (фиг. 3), что еще раз подтверждает нецелесообразность использования энергетических спектров для распознавания. С увеличением плотности жидкости (фиг. 6) значения частот передаточных функций увеличиваются. Из анализа графиков фиг. 8 видно, что для распознавания объектов с вероятностями D=0,98 и F=0,07 необходимо набрать статистику объемом n=500. Кроме того, видно, что чем больше объем выборки (фиг. 7), тем сильнее стягиваются плотности распределения. В предельном случае (при n→∞) эти распределения вырождаются в δ функции.
Проведенные исследования и их анализ показали, что все энергетические спектры отличаются между собой и, в принципе, могут быть использованы для распознавания. Однако изменения внешних физических условий вызывают деформации форм энергетических спектров, что, в свою очередь, приводит к появлению пересекающихся и изменяющихся во времени признаков распознавания. В то же время каждый объект имеет одну, только ему присущую передаточную функцию, частота, форма и другие характеристики которой зависят от параметров самого объекта, гидродинамических условий его взаимодействия с подстилающей поверхностью и являются инвариантными к случайным изменениям внешних физических условий, в том числе и к изменениям интенсивности воздействия на объект возмущенной свободной поверхности моря. Следовательно, для индивидуального распознавания (идентификации) свободноплавающих малоразмерных объектов в условиях реальной свободной поверхности моря необходимо применять передаточную функцию взаимодействия гидродинамической системы ″тело - свободная поверхность″, определяемую через энергетические спектры флюктуации ординат объектов и волнового профиля.
Устройство (фиг. 9), реализующее предлагаемый способ согласно настоящему изобретению содержит входную оптическую систему (ОС) - 1, передающее устройство (ПУ) - 2, ВКУ - 3, блок строб-импульсов строки и кадра (БСИ) - 4, блок селекции строк кадра (СК) - 5, блок формирования меток (ФК) - 6, счетчик строк (СЧ) - 7, блок выделения информативных строк (БИС) - 8, пороговое устройство (ПОР) - 9, блок установки нуля (У″0″) - 10, блок ввода информации (БВИ) - 11, спецпроцессор (СП) - 12, волномерный датчик (ВД) - 13 и блок проектирования эталонных статистических ″портретов″ (БЭП) - 14.
Выход ОС 1 оптически связан со входом ПУ 2, второй вход которого соединен с выходом БЭП 14. Первый выход ПУ 2 связан со входом ВКУ 3 и со входом ПОР 9, выход которого соединен со входом БИС 8. Второй и третий выходы ПУ 2 соединены со входами БСИ 4, выходы последнего соединены со входами СК 5 и блока У″0″ 10. Выходы блока СК 5 соединены со входами блока ФК 6, счетчика строк 7 и блока БИС 8. Выход блока ФК 6 соединен со входом ВКУ 3. Второй и третий входы счетчика строк 7 соединены соответственно с выходами блоков БИС 8 и У″0″ 10, а выход - со входами блока БВИ 11, выход которого соединен со входом СП 2, второй вход последнего соединен с выходом ВД 13, а выход - со входом БЭП 14.
Устройство (фиг. 9) работает следующим образом.
Изображение объекта проектируется входной оптической системой 1 на фотокатод передающей трубки устройства 2. Сформированный полный телевизионный сигнал поступает на ВКУ 3, где электрический сигнал преобразуется в видимое изображение. Импульсы начала строки Uz и начала кадра Uп поступают на соответствующие входы блока формирования строб-импульсов строки (Uсz) и кадра (Uсп) 4. С помощью блоков 4, 5 и 6 формируют стробируемое пространство, в которое вводят изображение объекта. Управление стробируемым пространством производят с помощью элементов управления блока 4. Сигналы Ucz и Uсп подают на блок СК 5, на выходе последнего вырабатываются строб-импульсы Uв, которые одновременно поступают на вход счетчика строк 7 и вход блока БИС 8. Кроме того, на второй вход блока 8 с выхода порогового устройства 9 поступают стандартные импульсы информативных строк кадра.
Пороговое устройство 9 срабатывает от сигнала объекта, снимаемого с устройства ПУ 2 при превышении сигналом уровня срабатывания устройства ПОР 9. При одновременной подаче импульса от ПОР 9 с импульсом строки на блок БИС 8 на выходе последнего формируется импульс окончания счета строк, подаваемый на вход счетчика строк 7. Таким образом, в регистре счетчика 7 записывают число отрок от начала отсчета (исходного уровня) до первой информативной строки, на которой наблюдается начало объекта за каждый кадр. После окончания строб-импульса кадра счетчик 7 с помощью блока У″0″ 10 задним фронтом этого импульса переводят в исходное состояние, а результаты счета переводят в блок БВИ 11. Такую операцию производят после каждого кадра.
В спецпроцессоре 12 по заданному алгоритму производят расчет передаточной функции |Kп(ω)|2 взаимодействия наблюдаемого объекта с подстилающей поверхностью. Для этих расчетов в СП 12 от волномерного датчика 13 вводят данные по волновому профилю для расчета энергетического спектра морского волнения Sн(ω)
В дальнейшем производят последовательное сравнение передаточных функций |Kн(ω)|2 с априорными передаточными функциями |Ki(ω)|2 извлекаемыми из долговременной памяти СП 12
Результатом этого сравнения является индивидуальное распознавание наблюдаемого объекта.
Портретные или словесные образы распознанного объекта с помощью блока БЭП 14 выдают на экран ВКУ 3 оператору. В случае, если в долговременной памяти СП 12 наблюдаемому объекту нет аналога, то его передаточная функция из оперативной памяти СП 12 вводят в долговременную (то есть каталог эталонных ″портретов″) как неопознанный объект для дальнейших исследований и описания его образа в блоке БЭП 14.
Предложенный способ и средство его реализации, обеспечивая высокую эффективность индивидуального распознавания в условиях реальной морской поверхности свободноплавающих малоразмерных объектов буй, бочка, мина и другие предметы, представляющие опасность в навигационном отношении (D=0,98; F=0,07), позволяет обеспечить выполнение, например, операции десантирования, как на оборудованное (в смысле предварительной воздушной; наземной и др. вида разведки побережья и прибрежной акватории моря), так и на не оборудованное побережье и повысить уровень предотвращенного ущерба от случайного столкновения десантного корабля, (например, с динамическими принципами поддержания), с неопознанными объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ В ПОГРУЖЕННОМ ПОЛОЖЕНИИ ОБЪЕКТА | 1987 |
|
SU1841085A1 |
| Способ определения дисперсии погрешности измерения двухмерного спектра волнения инерциальным измерительным модулем волномерного буя и устройство для его реализации | 2017 |
|
RU2644614C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| ПРИБОР ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2422853C1 |
| ПОЛУПОГРУЖЕННОЕ ОСНОВАНИЕ МОРСКОГО СООРУЖЕНИЯ | 1991 |
|
RU2011599C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
Изобретение относится к области измерений геометрических признаков свободно плавающих малоразмерных объектов. Достигаемый технический результат - обеспечение возможности распознавания в фиксированной точке исследуемой акватории моря свободноплавающих малоразмерных объектов. Указанный результат достигается за счет того, что в качестве геометрического признака распознавания выбирают визуализируемую ординату объекта, по измеренным мгновенным значениям которой определяют энергетический спектр реакции объекта на возмущающее воздействие взволнованной свободной поверхности моря и запоминают его, одновременно в этой же акватории измеряют ординаты профиля свободной поверхности моря, определяют энергетический спектр морского волнения и запоминают его, по отношению указанных энергетических спектров определяют передаточную функцию взаимодействия гидродинамической системы «тело - свободная поверхность», являющуюся статистическим «портретом» объекта, передаточную функцию сравнивают с каждой из ранее запомненных передаточных функций, по признаку непревышения заданного значения чебышевского отклонения измеренной и запомненных передаточных функций производят распознавание объекта. 9 ил.
Способ распознавания свободноплавающих малоразмерных объектов, основанный на измерении мгновенных значений геометрических признаков объекта, отличающийся тем, что, с целью обеспечения возможности распознавания в фиксированной точке исследуемой ограниченной акватории моря свободноплавающих малоразмерных объектов в условиях взволнованной свободной поверхности моря, в качестве геометрического признака распознавания выбирают визуализируемую ординату объекта, по измеренным мгновенным значениям которой определяют энергетический спектр реакции объекта на возмущающее воздействие взволнованной свободной поверхности моря и запоминают его, одновременно в той же акватории измеряют ординаты волнового профиля свободной поверхности моря с помощью волномерного датчика и по полученным мгновенным значениям ординат волнового профиля определяют энергетический спектр морского волнения и запоминают его, при этом объемы выборок при измерениях ординат объекта и волнового профиля берут одинаковыми, далее по отношению энергетического спектра реакции объекта к энергетическому спектру морского волнения определяют передаточную функцию взаимодействия гидродинамической системы ″тело - свободная поверхность″, являющуюся статистическим ″портретом″ объекта, после чего полученную передаточную функцию последовательно попарно сравнивают с каждой из ранее запомненных передаточных функций - статистических ″портретов″ свободноплавающих объектов далее по признаку непревышения заданного значения чебышевского отклонения измеренной и запомненных передаточных функций производят распознавание (или идентификацию) объекта.
| Сборный режущий инструмент | 1987 |
|
SU1502212A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

