Изобретение относится к области измерительной техники и может быть использовано для определения дисперсии погрешности измерения двухмерного спектра морского ветрового волнения с помощью инерциального измерительного модуля волномерного буя.
Известен способ определения динамических погрешностей микромеханических инерциальных датчиков и модулей на их основе [Патент РФ №2546983], [Д.Г. Грязин, О.О. Величко. Оценка характеристик микромеханических датчиков и модулей при их групповом изготовлении. Метод и его техническая реализация // Нано- и микросистемная техника. - 2015, №5(178), с. 37-44]. Исследуемый датчик или модуль устанавливается на стенд, способный воспроизводить колебания в заданном спектре частот, охватывающем весь частотный диапазон работы исследуемого объекта. При этом стендом задаются колебания со спектром, соответствующим конкретным условиям эксплуатации, и производится запись данных от стенда и характеристик, воспроизводимых датчиком или модулем. Полученные данные с помощью преобразования Фурье переводятся в частотную область для вычисления спектральной плотности мощности сигналов. Спектры входного сигнала со стенда и выходного сигнала датчика или модуля сравниваются для определения динамической погрешности датчика или модуля во всем частотном диапазоне его работы.
Данный способ принят за прототип предлагаемого изобретения - способа.
Указанный способ-прототип применим для определения динамической погрешности инерциальных датчиков и модулей, однако он не позволяет оценить дисперсию погрешности измерения двухмерного спектра морского волнения по данным от инерциального модуля волномерного буя.
Известно устройство для оценки динамических погрешностей малогабаритных инерциальных систем [Патент РФ №2554631]. Стенд предназначен для выработки угловых колебаний в двух плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне. Он представляет собой раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе. Система управления позволяет с помощью управляющего компьютера и установленного на нем программного обеспечения управлять режимами работы стенда. Недостаток указанного устройства заключается в том, что стенд воспроизводит только угловые колебания в двух ортогональных плоскостях, в то время как для полной имитации морского волнения необходимо воспроизводить также вертикальные колебания.
Известно устройство для калибровки волномерных буев [P.L. Gerritzen The calibration of wave buoys. Datawell BV, Zomerluststraat 4, 2012 LM Haarlem, The Netherlands.: http://www.datawell.nl/Support/Documentation/Publications/datawell_publication_hydrographicinstrumentation-calibrationwavebuoys_oct1993_2004-06-30.pdf]. Устройство представляет собой установку, состоящую из основания и подвижной штанги, на конце которой закрепляется калибруемый буй. Установка позволяет имитировать вертикальные перемещения буя на волнении. Недостатком указанного устройства является то, что он воспроизводит только вертикальные колебания, в то время как для имитации движения буя по поверхности волны необходимо воспроизводить также угловые колебания.
Данное устройство для калибровки волномерных буев принято за прототип предлагаемого изобретения - устройства.
Указанное устройство-прототип позволяет воспроизводить вертикальные колебания для калибровки буев. При этом будет определена точность измерений только статистических характеристик волнения. Однако волномерные буи имеют шесть степеней свободы и при движении по поверхности волны совершают сложные движения, включающие вертикальные и угловые колебания в некотором спектре частот. Следовательно, прототип не позволяет воспроизводить условия, наиболее приближенные к реальным условиям эксплуатации волномерных буев, и, соответственно, определять точность измерения спектральных характеристик волнения, в том числе и двухмерного спектра морского волнения.
Задачей изобретения является разработка способа для определения дисперсии погрешности измерения двухмерного спектра морского волнения инерциальным измерительным модулем волномерного буя и устройства для его реализации.
Технический результат: определение дисперсии погрешности измерения двухмерного спектра морского волнения инерциальным измерительным модулем волномерного буя; возможность калибровки волномерных буев на основе инерциальных измерительных модулей, предназначенных для измерения не только статистических, но и спектральных характеристик волнения, в том числе двухмерного спектра; повышение достоверности результатов измерений за счет воспроизведения условий, наиболее приближенных к реальным условиям функционирования волномерного буя, путем задания угловых и вертикальных колебаний с заданными частотными спектрами.
Технический результат достигается следующим образом. Определение дисперсии погрешности измерения двухмерного спектра волнения производится за счет сравнения двухмерных спектров, построенных по данным от стенда и инерциального модуля волномерного буя. Реализация указанного способа определения дисперсии возможна за счет создания устройства, которое наряду с вертикальными перемещениями реализует также и угловые колебания в двух ортогональных плоскостях с заданными частотными спектрами.
Способ реализуется следующим образом.
Исследуемый инерциальный модуль волномерного буя устанавливается на стенд, способный воспроизводить одновременно вертикальные и угловые колебания в двух ортогональных плоскостях. При этом колебания воспроизводятся в заданном спектре частот, наиболее соответствующем реальным условиям эксплуатации. Производится запись характеристик, воспроизводимых стендом, и данных от инерциального измерительного модуля волномерного буя (вертикальное перемещение, углы крена и дифферента). При этом угол курса не изменяется, а девиация от металлических частей стенда принимается постоянной. Далее производится расчет входного (по данным от стенда) и выходного (по данным от инерциального модуля) двухмерных спектров в соответствии с выражением [Рахманин Н.Н. Стохастическое описание морской поверхности / Н.Н. Рахманин. - СПб: Государственный Морской Технический Университет, 1994. - 52 с.]:
 ,
,
где ω - круговая частота, рад/с;
α - угол от 0 до 360° в географической системе координат.
При этом коэффициенты при членах ряда описываются выражениями:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где R(τ) - автокорреляционная функция вертикального перемещения;
RXX(τ) - автокорреляционная функция угла крена;
RYY(τ) - автокорреляционная функция угла дифферента;
RX(τ) - корреляционная функция вертикального перемещения и угла крена;
RY(τ) - корреляционная функция вертикального перемещения и угла дифферента;
RXY(τ) - корреляционная функция углов крена и дифферента;
τ - временной параметр;
 - волновое число;
- волновое число;
g - ускорение силы тяжести.
С учетом полученных двухмерных спектров входных Sвx(ω, α) и выходных SBЫХ(ω, α) данных, можно получить двухмерный спектр погрешности SПОГР(ω, α) измерения двухмерного спектра исследуемым инерциальным модулем как разность между рассчитанными спектрами SПОГР(ω, α)=SBЫX(ω, α)-SBX(ω, α). Тогда дисперсия погрешности измерения двухмерного спектра инерциальным модулем будет определяться как площадь под графиком рассчитанного спектра SПОГР(ω, α):
 .
.
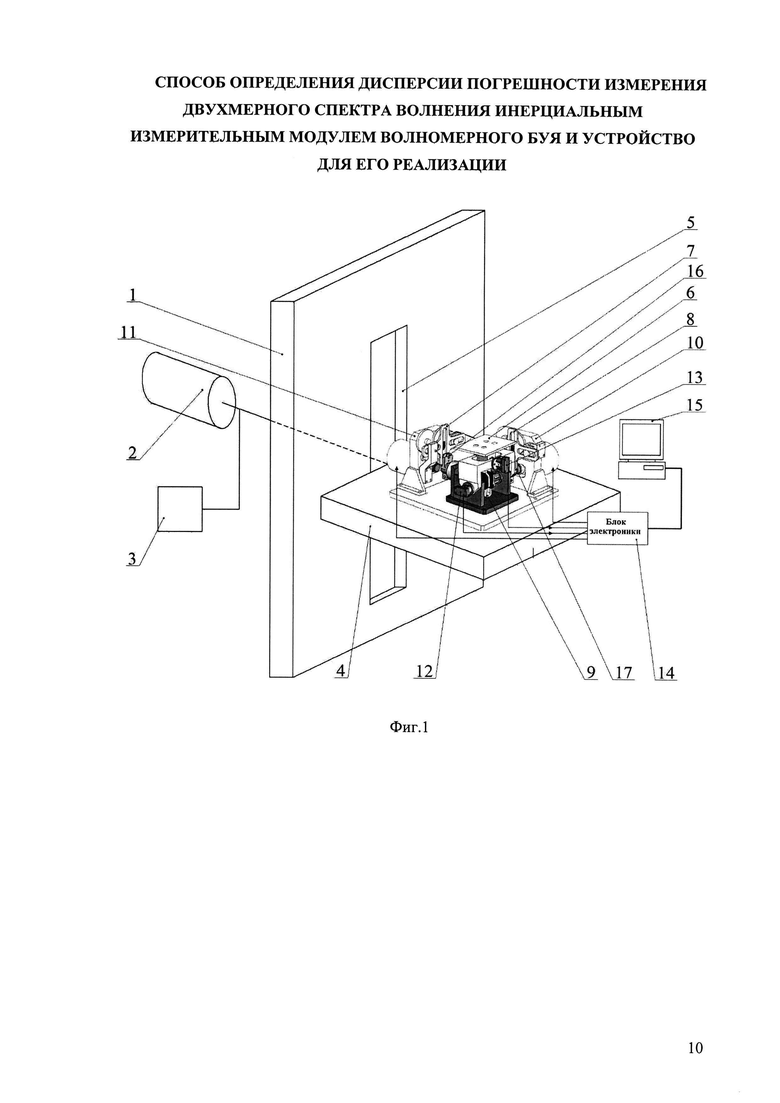
Для реализации метода предложено устройство, общий вид которого показан на фиг. 1, где приняты следующие обозначения:
1 - корпус;
2 - двигатель, осуществляющий вертикальное перемещение платформы 4;
3 - частотный преобразователь;
4 - платформа;
5 - направляющие;
6 - платформа двухосного стенда качки;
7, 8 - кривошипно-кулисные механизмы;
9 - трехстепенной подшипник качения;
10,11 - двигатели, приводящие платформу 6 в движение;
12, 13 - цифровые преобразователи;
14 - блок управления двигателями (далее - блок управления);
15 - управляющий компьютер;
16, 17 - преобразователи углового перемещения валов двигателей.
Устройство содержит корпус 1, в котором расположен двигатель 2 с частотным преобразователем 3, вал которого кинематически соединен с платформой 4, которая совершает вертикальные колебания по направляющим 5, закрепленным на корпусе 1. На платформе 4 установлен двухосный стенд качки, представляющий собой раскачивающуюся в двух плоскостях платформу 6, которая с помощью кривошипно-кулисных механизмов 7, 8 и трехстепенного подшипника качения 9 соединена с валами двигателей 10, 11. Информация об угловом положении платформы снимается с цифровых преобразователей 12, 13, соединенных с блоком управления 14 двигателями. Блок управления 14 соединен с двигателями 10, 11, управляющим компьютером 15 (далее - компьютером) и преобразователями 16, 17 углового перемещения валов двигателей.
Устройство работает следующим образом. При помощи частотного преобразователя 3 задается необходимая частота вращения вала двигателя 2, который приводит в движение платформу 4, совершающую вертикальные перемещения по направляющим 5, закрепленным на корпусе 1. Одновременно при помощи программного обеспечения, установленного на компьютере 15, оператором задаются параметры угловых колебаний. На основании задаваемых параметров и показаний преобразователей 16, 17 углового перемещения валов двигателей блок управления 14 генерирует напряжения якорей двигателей 10, 11. Вращательное движение валов двигателей 10, 11 преобразуется в возвратно-поступательные движения платформы 6 с помощью кривошипно-кулисных механизмов 7, 8 и трехстепенного подшипника качения 9. Информация об угловом положении платформы снимается с цифровых преобразователей 12, 13. Система управления установкой позволяет воспроизводить вертикальные и угловые колебания в заданном спектре частот. При этом вертикальные и угловые колебания синхронизированы между собой.
Работа макета устройства и способа проверена в ходе лабораторных испытаний.
Испытания показали, что воспроизведение одновременно вертикальных и угловых колебаний в заданном спектре частот позволяет производить определение дисперсии погрешности измерения двухмерного спектра морского волнения инерциальным измерительным модулем волномерного буя. Это, в свою очередь, позволяет проводить калибровку волномерных буев на основе инерциальных измерительных модулей, предназначенных для измерения не только статистических, но и спектральных характеристик волнения, в том числе двухмерного спектра. Задание колебаний в заданном спектре частот позволит повысить достоверность результатов измерений за счет воспроизведения условий, наиболее приближенных к реальным условиям функционирования волномерного буя. Таким образом, заявленный технический результат считается достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волномерный буй с инерциальным измерительным модулем на основе микромеханических датчиков | 2016 |
|
RU2631965C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ МИКРОМЕХАНИЧЕСКИХ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ НА ИХ ОСНОВЕ | 2013 |
|
RU2546983C2 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СВОБОДНОПЛАВАЮЩИХ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1987 |
|
SU1841026A1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
Изобретение относится к области измерительной техники. Способ определения дисперсии погрешности измерения двухмерного спектра волнения инерциальным измерительным модулем волномерного буя, заключается в том, что определение погрешности производится путем сравнения характеристик, задаваемых стендом, с характеристиками, воспроизводимыми инерциальным модулем. При этом стендом одновременно воспроизводятся как вертикальные, так и угловые колебания в двух ортогональных плоскостях в заданном спектре частот, наиболее приближенном к реальным условиям эксплуатации, с дальнейшей обработкой данных от стенда и исследуемого инерциального модуля для входного (по данным от стенда) SВХ(ω, α) и выходного (по данным от инерциального модуля) SBЫX(ω, α) двухмерных спектров, разность между которыми будет определять двухмерный спектр погрешности измерения SПОГР(ω, α)=SВЫХ(ω, α)-SВX(ω, α) и дисперсию погрешности измерения как площадь под графиком рассчитанного спектра  . Технический результат - определение дисперсии погрешности измерения, возможность калибровки буев, повышение достоверности измерений. 1 ил.
. Технический результат - определение дисперсии погрешности измерения, возможность калибровки буев, повышение достоверности измерений. 1 ил.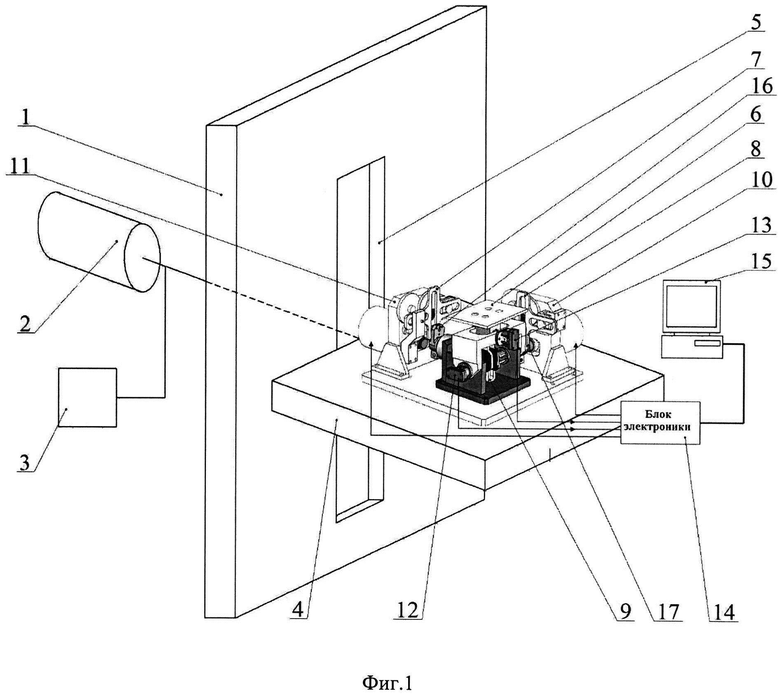
Способ определения дисперсии погрешности измерения двухмерного спектра волнения инерциальным измерительным модулем волномерного буя, заключающийся в том, что определение погрешности производится путем сравнения характеристик, задаваемых стендом, с характеристиками, воспроизводимыми инерциальным модулем, отличающийся тем, что стендом одновременно воспроизводятся как вертикальные, так и угловые колебания в двух ортогональных плоскостях в заданном спектре частот, наиболее приближенном к реальным условиям эксплуатации, с дальнейшей обработкой данных от стенда и исследуемого инерциального модуля для входного (по данным от стенда) SВХ(ω, α) и выходного (по данным от инерциального модуля) SBЫX(ω, α) двухмерных спектров, разность между которыми будет определять двухмерный спектр погрешности измерения SПОГР(ω, α)=SВЫХ(ω, α)-SВX(ω, α) и дисперсию погрешности измерения как площадь под графиком рассчитанного спектра  .
.
| Белова О.О | |||
| Разработка и исследованием методов и алгоритмов для измерения параметров трехмерного волнения волномерным буем на микромеханическом модуле | |||
| Диссертация на соискание ученой степени к.т.н., СПб.: ИТМО, 2016 (с | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СТЕНД ДЛЯ ВЫРАБОТКИ УГЛОВЫХ КОЛЕБАНИЙ В ДВУХ ПЛОСКОСТЯХ | 2013 |
|
RU2554631C2 |
| CN 205116684 U, 30.03.2016 | |||
| Величко О.О | |||
| Методы и технические средства для метрологического обеспечения производства и испытаний микромеханических инерциальных датчиков // XV конференции молодых ученых "Навигация и управление движением", 12.03.2013 | |||
| М.С | |||
| Волошина | |||
| Системы случайных величин : метод | |||
| указ | |||
| // Сиб | |||
| гос | |||
| индустр | |||
| ун-т, Новокузнецк : Изд | |||
| центр СибГИУ, 2014 (с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ МИКРОМЕХАНИЧЕСКИХ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ НА ИХ ОСНОВЕ | 2013 |
|
RU2546983C2 |
| ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ | 2007 |
|
RU2367921C2 |
| Грязин Д.Г | |||
| Метрологическое обеспечение средств измерений морского волнения // Молодежная научная конференция Комплексные исследования морей России: оперативная океанография и экспедиционные исследования | |||
| Севастополь: ФГБУН "Морской гидрофиический институт РАН", 25-29 апреля 2016 (с | |||
| Ножной переключатель для перемены направления вращения электродвигателя | 1921 |
|
SU534A1 |
| СЕПАРАТОР | 2010 |
|
RU2438755C1 |
| Машина для ширения и сушки ткани | 1978 |
|
SU787515A1 |

