Устройство стробирования импульсов относится к области радиолокации, радиоэлектронной аппаратуры импульсного принципа действия и может быть использовано в аппаратуре дискретного способа работы, где параметром управления является временное положение импульса напряжения или тока.
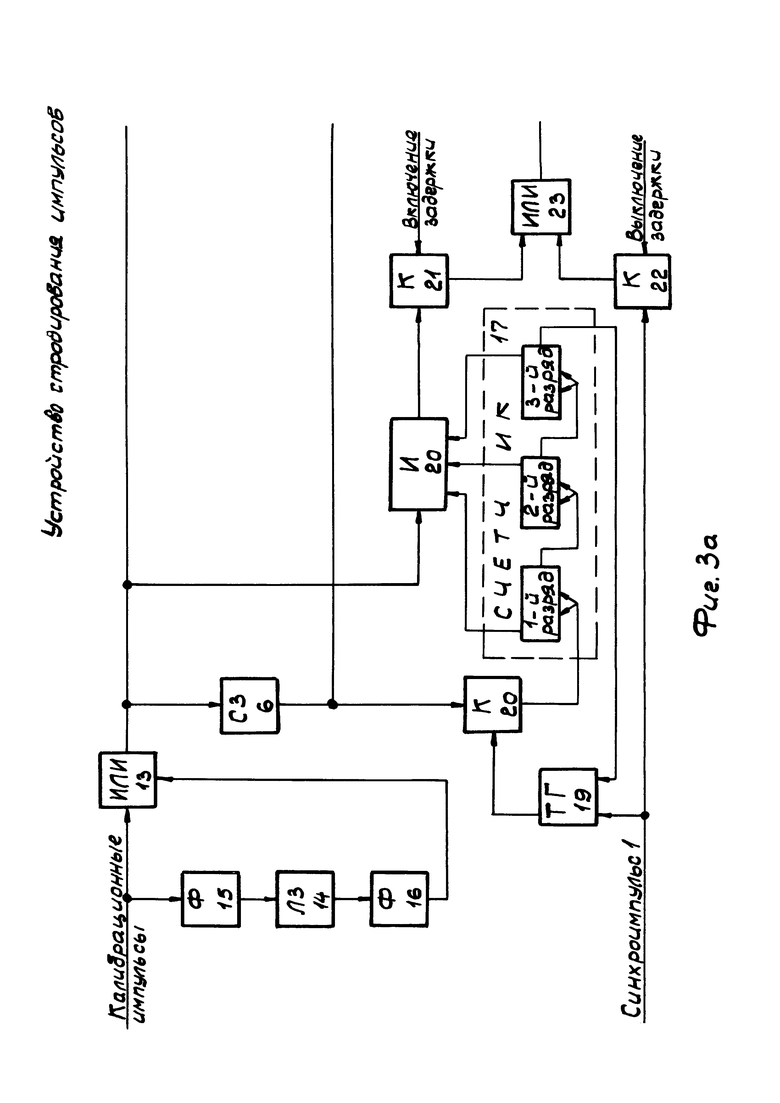
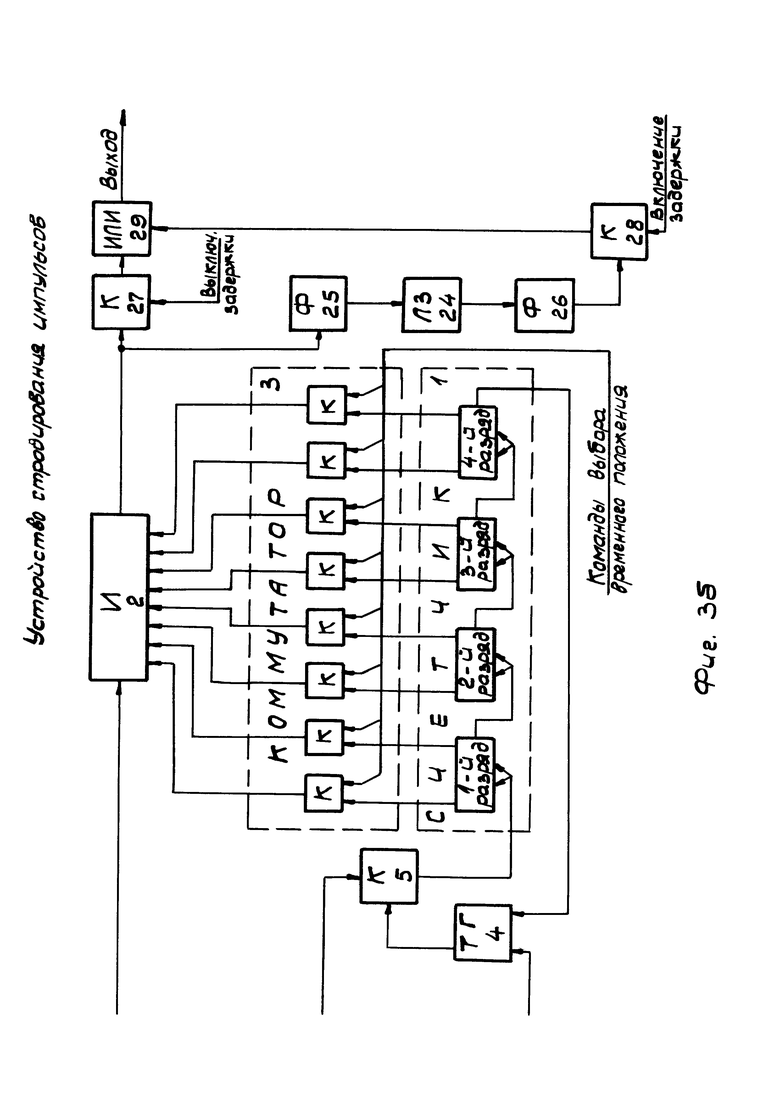
Известно устройство, разработанное предприятием-заявителем (см. фиг.3) и предназначеное для управления временным положением импульса запуска передатчика РЛС, обеспечивающей при этом запрос маяков-ответчиков.
Устройство синхронизируется сигналами, поступающими из сопрягаемой РЛС (типов РБП, И2).
Известное устройство состоит из следующих основных функциональных частей:
- двоичный счетчик 1, схема совпадений 2, коммутатор 3, триггер 4, ключевая схема 5 и схема задержки 6, которые осуществляют выбор временного положения выходного импульса;
- схема разделения 13, линия задержки 14, формирователи 15, 16, которые осуществляют удвоение частоты следования входных калибрационных импульсов от сопрягаемой РЛС;
- трехразрядный двоичный счетчик 17, схема совпадений 18, триггер 19 и ключевая схема 20, которые осуществляют формирование импульса, задержанного относительно синхроимпульса на три периода следования входных калибрационных импульсов;
- ключевые схемы 21, 22 и схема разделения 23, подключающие к входу триггера 4 цепь синхроимпульса или цепь импульса, задержанного относительно синхроимпульса на три периода следования калибрационных импульсов;
- линия задержки 24, формирователи 25, 26, ключевые схемы 27, 28 и схема разделения 29 осуществляющие задержку выходного импульса на 0,25 периода входных калибрационных импульсов.
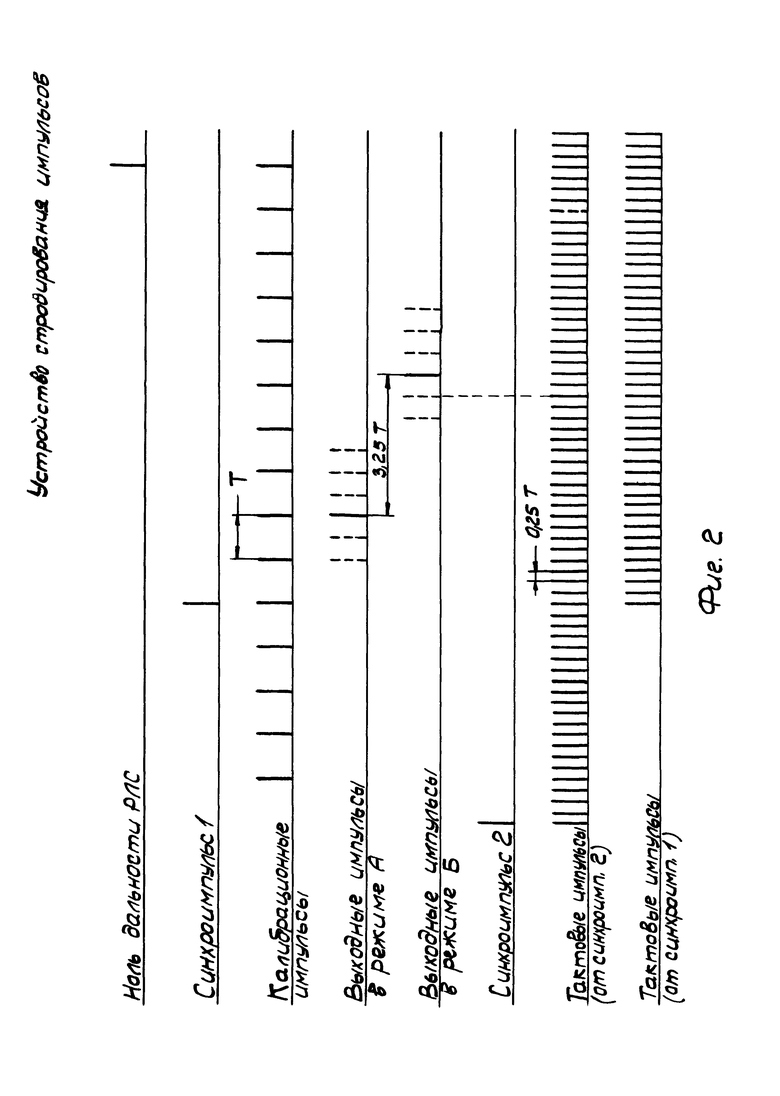
Из РЛС в устройство должны поступать синхроимпульс, опережающий ноль дальности на 133,(3) мксек и калибрационные импульсы дальности с периодом следования Т (13,(3) мксек).
Задачей устройства является стробирование в режиме работы А импульса, задержанного относительно синхроимпульса.
Величина задержки должна изменяться командами выбора временного положения (потенциалами) от органов управления на величину, кратную 0,5Т. При включении режима работы Б импульс должен задерживаться на 3,25Т.
Стробирование выходных импульсов осуществляется путем пропускания на выход схемы совпадений 2 одного из последовательности импульсов, поступающих на ее вход со схемы разделения 13.
В исходном состоянии устройства все разряды счетчиков 1 и 17 находятся в положении "0", триггеры 4 и 19 закрывают ключевые схемы 5 и 20, останавливая работу счетчиков.
При этом на некоторые входы схем совпадений 18 и 2 от счетчиков 17 и 1 поступают запрещающие потенциалы; на выходе схем 18 и 2 импульсы отсутствуют.
Синхроимпульс, опрокидывая триггер 19, через ключевую схему 20 подает на вход счета счетчика 17 импульсы, задержанные схемой 6.
После поступления в счетчик 17 шести импульсов схема совпадений 20 пропускает на свой выход один импульс, который задержан относительно синхроимпульса на три периода следования (3Т) калибрационных импульсов.
В режиме работы А ключевые схемы 21 и 28 не пропускают импульсы, а ключевые схемы 23 и 27 - пропускают.
Следовательно, синхроимпульс опрокидывает триггер 4 и счетчик 1 начинает считать импульсы, поступающие на его вход счета через ключевую схему 5. В какой-то из интервалов между импульсами счета (в зависимости от конкретного сочетания команд выбора временного положения) на все входы схемы совпадений 2 будут поступать разрешающие потенциалы и она пропустит на свой выход импульс, который пройдет на выход устройства через ключевую схему 27 и схему разделения 29.
В режиме работы Б ключевые схемы 21 и 28 пропускают импульсы, а схемы 23 и 27 - не пропускают. Поэтому счетчик 1 начинает работу от импульса со схемы совпадений 18 с задержкой на три периода следования (3Т) входных калибрационных импульсов. Выходные импульсы схемы совпадений 2 задерживаются на время 3,25Т-3Т=0,25Т линией задержки 24 и поступают на выход устройства через ключевую схему 28 и схему разделения 29.
Как следует из приведенного описания, устройство стробирования может сопрягаться только с РЛС, имеющими синхроимпульс, который опережает ноль дальности на 133,(3) мксек (20 км радиолокационной дальности) и калибрационные импульсы дальности с периодом следования 13,(3) мксек (РЛС типов РБП, И-2).
Однако известны и другие типы РЛС (например, "Гроза", "Орион", МРСЦ-1, МРСЦ-2 и др.), которые не имеют импульсов с указанными временными положениями.
Некоторые РЛС (например, типа "Гроза") имеют синхроимпульс, опережающий ноль дальности на 133,(3) мксек, но не имеет калибрационных импульсов с периодом следования 13,(3) мксек. Формирование таких импульсов сопряжено с существенными усложнениями эксплуатируемых РЛС и их доработкой.
Некоторые РЛС (например, типа "Орион") работают в комплексе с вычислительными устройствами. У таких РЛС временные положения импульсов кратны целому числу микросекунд и формирование импульсов с упомянутым временным положением сопряжено с существенным усложнением аппаратуры.
Перспективные РЛС и РЛС (например, типа "Гроза") которые имеют временные положения импульсов, кратные интервалу 13,(3) мксек, могут формировать синхроимпульс, опережающий ноль дальности на 13,(3)×15=200 мксек (30 км радиолокационной дальности).
Некоторые РЛС (например, типа МРСЦ-1, МРСЦ-2) имеют период следования импульсов, кратный 66,(6) мксек (10 км радиолокационной дальности). У таких РЛС формирование синхроимпульса, опережающего дальности на 30 км (200 мксек), не связано с усложнениями аппаратуры.
Таким образом, недостатками известного устройства являются:
1. Сложность способа синхронизации, исключающая возможность использования многих типов РЛС для запроса маяков-ответчиков.
2. Синхронизация устройства осуществляется не одним, а двумя сигналами, что усложняет связи между РЛС и устройством.
3. Временное положение синхронизирующих импульсов, не кратное целому числу микросекунд, усложняет их формирование в перспективных (разрабатываемых) системах РЛС с вычислительными машинами, где временные положения импульсов кратны целому числу микросекунд.
4. Наличие в схеме известного устройства линий задержки, их формирователей, двух счетчиков и схем разделения снижает надежность, увеличивает габариты, вес и стоимость устройства.
Целью настоящего изобретения является устранение указанных недостатков.
Цель достигается тем, что в предлагаемое устройство, содержащее:
- двоичный счетчик, соединенный со схемой совпадений через коммутатор, к которому подключены цепи команд выбора временного положения;
- включенную между входом счета счетчика и схемой задержки ключевую схему, которой управляет триггер с правым входом, соединенным с цепью импульса переноса последнего разряда счетчика;
- входную цепь синхроимпульса;
- входные цепи команд включения задержки,
введены:
- генератор тактовых импульсов, выходные импульсы которого совпадают со всеми временными положениями выходных импульсов устройства;
- ключевые схемы, подключающие (по командам выключения задержки) цепь синхроимпульса к входам установки разрядов счетчика в состояние "1".
Такое построение устройства исключает необходимость в:
- получении от сопрягаемой РЛС калибрационных импульсов и применении линии задержки на половину их периода следования;
- применении линии задержки (на 0,25 периода следования калибрационных импульсов) и счетчика для получения задержки.
Изменение задержки при переходе из режима Б в режим А обеспечивается установкой в состояние "1" соответствующих разрядов счетчика путем соединения цепи синхроимпульса с их входами установки в положение "1" через соответствующие ключевые схемы.
Установка синхроимпульсом разрядов счетчика в состояние "1" и применение счетчика с числом разрядов, достаточным для счета тактовых импульсов, размещенных в интервале 200 мксек, позволяет синхронизировать устройство импульсом, опережающим ноль дальности РЛС на 200 или 133,(3) мксек.
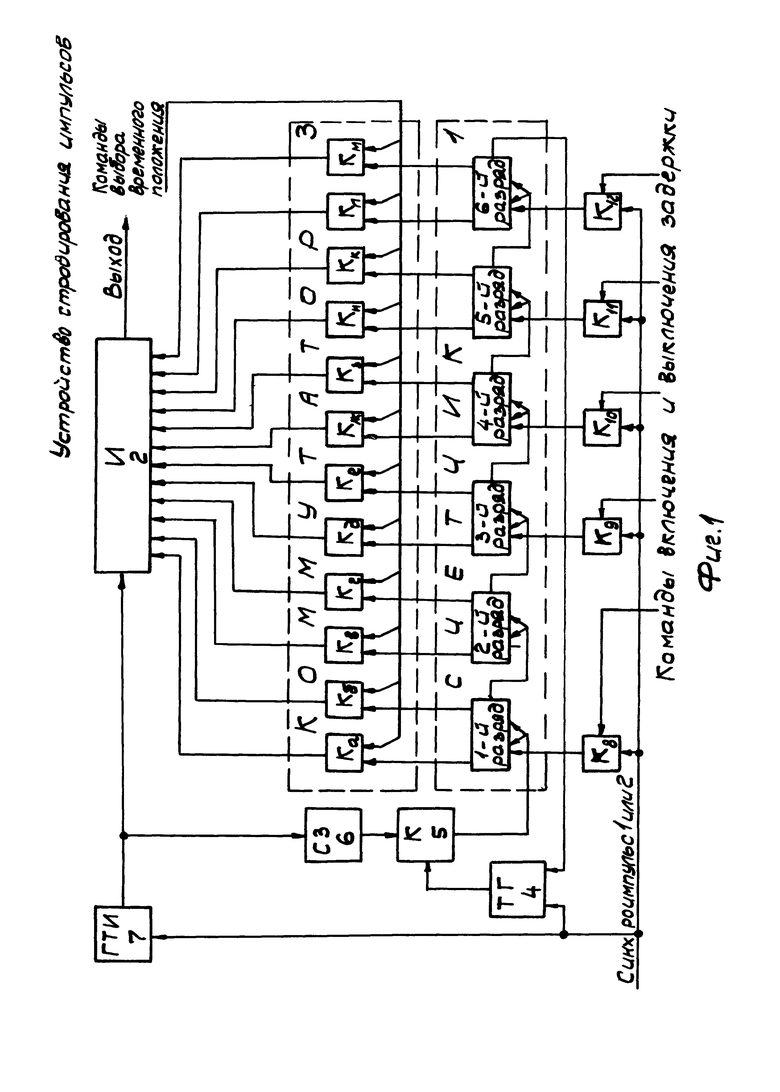
На фиг. 1 представлена функциональная схема предлагаемого устройства стробирования, на фиг.2 - временные соотношения, на фиг.3 - известное устройство стробирования.
Предлагаемое устройство (см. фиг. 1) состоит из следующих функциональных частей:
- двоичный счетчик 1, управляющий схемой совпадения 2, через коммутатор 3;
- триггер 4, открывающий ключевую схему 5 для подключения входа счета счетчика 1 к выходу схемы задержки 6;
- генератор тактовых импульсов 7, выходные импульсы которого совпадают со всеми временными положениями выходных импульсов устройства;
- ключевые схемы 8-12, подключающие (по командам выключения задержки) цепь синхроимпульса к входам установки разрядов счетчика в состояние "1".
Исходное состояние устройства (перед поступлением синхроимпульса) характеризуется следующими положениями его элементов:
- все разряды счетчика 1 находятся в положении "0"; при этом на их левых выходах имеются потенциалы, запрещающие (а на правых - разрешающие) стробирование схемой совпадения 2;
- команды выбора временного положения (от органов управления при любом их положении) в коммутатор 3 не поступают одновременно на все ее четные ключевые схемы (б, г, е, з, к, м); поэтому в исходном положении схема совпадений 2 не получает от счетчика на все свои входы потенциалы, разрешающие стробирование;
- триггер 4 находится в таком положении, что закрывает ключевую схему 5, отключая вход счета счетчика 1;
- генератор тактовых импульсов 7 не работает.
При работе от синхроимпульса 2 в режиме Б команды выключения задержки не подаются на командные входы ключевых схем 8-12, которые поэтому не пропускают синхроимпульс 2 на входы установки разрядов счетчика 1 в состояние "1".
Синхроимпульс 2 запускает генератор тактовых импульсов 6 (его выходные импульсы изображены на фиг. 2) и опрокидывает триггер 4. Тактовые импульсы через схему задержки 6 и открытую триггером 4 ключевую схему 5 поступают на вход счета счетчика 1. Через коммутатор 3 с выходов разрядов счетчика 1 на схему совпадения 2 поступают запрещающие и разрешающие потенциалы. Благодаря схеме задержки 6 переключение потенциалов на входах схемы совпадений 2 происходит в паузе между тактовыми импульсами.
Во время одного из интервалов между задержанными тактовыми импульсами (а следовательно, во время действия одного из тактовых импульсов) на все входы схемы совпадений 2 поступают разрешающие стробирование потенциалы. При этом на выходе устройства появляется импульс (один из последовательности тактовых импульсов).
При переходе из режима Б в режим А задержка выходных импульсов должна быть уменьшена на 13 периодов следования тактовых импульсов. Это достигается записью в счетчик перед началом счета 13 единиц путем установки в положение "1" первого, третьего и четвертого разрядов. Для этого на командные входы ключевых схем 8, 9 и 10 подаются команды выключения задержки, благодаря чему синхроимпульс 2 выполняет запись нужного числа в счетчике.
Синхроимпульс 1 поступает от РЛС позже синхроимпульса 2 на 20 периодов следования тактовых импульсов. Поэтому для получения тех же временных положений в режимах Б и А при работе от синхроимпульса 1 перед началом счета в счетчик необходимо вводить число, соответственно 0+20=20 и 13+20=33. Таким образом, при работе от синхроимпульса 1 в режиме Б на ключевые схемы 9 и 11, а в режиме А - на 8 и 12, необходимо подавать разрешающие команды выключения задержки.
При переходе всех разрядов счетчика в состояние "0" импульс переноса последнего разряда опрокидывает триггер 4, приводя схему в исходное состояние.
Длительность работы генератора 7 выбирается меньше периода следования синхроимпульсов и больше времени работы счетчика 1.
Как следует из приведенного описания, предлагаемое устройство стробирования:
- не требует от РЛС для синхронизации калибрационных импульсов;
- может синхронизироваться от синхроимпульса, опережающего ноль дальности на 133,(3) или 200 мксек;
- не содержит крупногабаритных и тяжелых линий задержки трехразрядного счетчика, а также элементов их подключения и отключения.
Следовательно:
- использование предлагаемого устройства стробирования исключает необходимость разработки нескольких типов устройств для обеспечения запроса маяков-ответчиков различными типами РЛС;
- предлагаемое устройство имеет более высокую надежность, меньше габариты, вес и стоимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНЦИЯ ПОМЕХ | 1993 |
|
RU2054806C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| Адаптивный формирователь опережающего синхросигнала | 1988 |
|
SU1554110A1 |
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ЗАПАЗДЫВАНИЯ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ЦЕЛЕЙ, В РАДИОЛОКАЦИОННОЙ СТАНЦИИ (РЛС) С ВОБУЛИРОВАННЫМ ПЕРИОДОМ СЛЕДОВАНИЯ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2007 |
|
RU2342674C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| СТАНЦИЯ ПОМЕХ | 2010 |
|
RU2434241C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| АНАЛОГО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ | 1967 |
|
SU196119A1 |
Изобретение относится к области радиолокации, радиоэлектронной аппаратуры импульсного принципа действия и может быть использовано в аппаратуре дискретного способа работы, где параметром управления является временное положение импульса напряжения или тока. Технический результат - упрощение устройства, повышение надежности и расширение функциональных возможностей. Устройство содержит двоичный счетчик, соединенный со схемой совпадений через коммутатор каналов, к которому подключены входы команд выбора временного положения выходного импульса, ключевую схему, управляемую через схему задержки, и триггер, соединенный с выходом переполнения счетчика, цепи синхроимпульсов и команд включения задержки, а также генератор и ключевые схемы, причем вход синхроимпульсов устройства подключен ко входам генератора, триггера и ключевых схем, выход генератора соединен со входом схемы задержки и первым входом схемы совпадений, другие входы ключевых схем соединены с шинами команд включения задержки, выходы ключевых схем соединены со входами установки разрядов счетчика, а выход схемы совпадений является выходом устройства. 4 ил.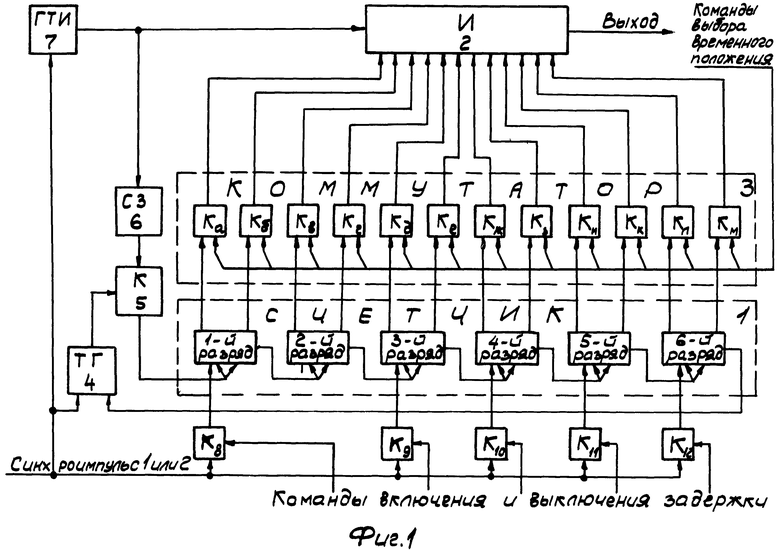
Устройство стробирования импульсов, содержащее двоичный счетчик, соединенный со схемой совпадений через коммутатор каналов, к которому подключены входы команд выбора временного положения выходного импульса, ключевую схему, управляемую через схему задержки, и триггер, соединенный с выходом переполнения счетчика и цепи синхроимпульсов и команд включения задержки, отличающееся тем, что, с целью упрощения устройства, повышения надежности и расширения функциональных возможностей, снабжено генератором и ключевыми схемами, причем вход синхроимпульсов устройства подключен ко входам генератора, триггера и ключевых схем, выход генератора соединен со входом схемы задержки и первым входом схемы совпадений, другие входы ключевых схем соединены с шинами команд включения задержки, выходы ключевых схем соединены со входами уставки разрядов счетчика, а выход схемы совпадения является выходом устройства.

