Изобретение относится к области радиолокации, в частности к радиолокационному обнаружению и измерению дальности до целей на фоне пассивных помех, и может найти применение в РЛС, использующих высокую частоту следования зондирующих импульсов.
Известно устройство измерения времени запаздывания с помощью электронно-лучевой трубкой (ЭЛТ) [1, с.16], на горизонтально отклоняющие пластины которой подается отклоняющее напряжение пилообразной формы, а на вертикально отклоняющие пластины - эхо-сигналы с приемного устройства. Устройство позволяет определить дальность до целей, если выполняется условие однозначного отсчета

где ТП. - период повторения импульсов запуска передатчика;
tЗ max - максимальное время запаздывания эхо-сигнала;
Dmax - максимальная дальность обнаружения целей;
С - скорость распространения радиоволн.
Однако часто возникает необходимость уменьшать период повторения импульсов запуска, например, для увеличения коэффициента подпомеховой видимости устройств череспериодной компенсации пассивных помех. Поэтому в реальных условиях могут оказаться целесообразными РЛС с высокими частотами следования импульсов, несмотря на то что при этом нарушаются условия однозначного определения расстояний между РЛС и целями [2, с.252], и на экране ЭЛТ появятся ложные отметки от удаленных целей, для которых tЗ>TП.
Для устранения неоднозначности измерения дальности применяется изменение частоты повторения зондирующих импульсов. При этом отметка от цели, для которой не выполняется условие однозначного отсчета дальности (1), на экране ЭЛТ раздваивается, что и является признаком неоднозначности [1, с.20].
Недостатком данного устройства [1, с.16] является уменьшение рабочей зоны РЛС при работе с высокой частотой следования зондирующих импульсов, так как ее граница определяется не максимальной дальностью обнаружения целей, а периодом следования зондирующих импульсов
Dp=TПC/2<Dmax.
Кроме того, в устройстве отсутствует автоматизация процесса измерения дальности до цели и исключение ложных отметок.
Известно также устройство цифрового съема дальности [3, с.125], содержащее генератор счетных импульсов, схему совпадения, счетчик импульсов, триггер.
Устройство обеспечивает автоматизацию процесса измерений дальности с минимальными аппаратурными погрешностями.
Однако, если не выполняется условие однозначного измерения дальности (1), могут возникать значительные ошибки [3, с. 125]. Это ограничивает рабочую зону РЛС при работе с высокой частотой следования зондирующих импульсов. Кроме того, устройство позволяет за один период повторения зондирующих импульсов измерить дальность только до одной цели.
Наиболее близким по технической сущности (прототипом заявляемого изобретения) является цифровой измеритель времени запаздывания [4. с.240], содержащий генератор счетных импульсов, генератор импульсов, триггер, счетчик, схему И, блок совпадения, состоящий из n=1, ..., N схем И, при этом тактовый вход счетчика подключен к выходу схемы И, один вход которой соединен с выходом генератора счетных импульсов, а второй вход - с выходом триггера, два входа которого соединены с двумя выходами генератора импульсов, вход которого подключен к входу сброса счетчика и к синхронизатору РЛС, выходы счетчика соединены с первыми входами соответствующих схем И блока совпадения, вторые входы которых объединены и подключены к выходу приемника РЛС, выходы схем И блока совпадения являются выходами устройства.
В устройстве временной интервал задержки эхо-сигнала преобразуется в цифровую форму. В момент запуска передатчика импульс синхронизации запускает триггер, открывающий схему И, разрешая прохождение счетных импульсов от генератора счетных импульсов на счетчик. Отраженный сигнал с приемника открывает схемы И блока совпадения и разрешает считывание кода, записанного в счетчик к этому времени. Сброс счетчика и перевод триггера в исходное состояние выполняет следующий импульс синхронизации.
Устройство позволяет измерить дальность до всех целей, обнаруженных РЛС.
Однако, если не выполняется условие однозначного измерения дальности (1), могут возникать значительные ошибки [3, с.125]. Это ограничивает рабочую зону РЛС при работе с высокой частотой следования зондирующих импульсов, так как ее граница определяется не максимальной дальностью обнаружения целей, а периодом следования зондирующих импульсов
Dp=TПС/2<Dmax.
Таким образом, недостатком данного устройства является уменьшение зоны однозначного измерения дальности до цели при работе РЛС с высокой частотой следования зондирующих импульсов.
Задача, на решение которой направлено заявляемое устройство, состоит в измерении дальности до целей, для которых выполняется условие однозначного измерения дальности tЗ<TП, а также до удаленных целей, для которых tЗ>ТП.
Технический результат выражается в увеличении зоны однозначного измерения дальности до цели при работе РЛС с высокой частотой следования зондирующих импульсов.
Технический результат достигается тем, что в устройство, содержащее генератор счетных импульсов, генератор импульсов, триггер, первый счетчик, первую схему И, первый блок совпадения, состоящий из n=1, ..., N схем И, при этом тактовый вход первого счетчика подключен к выходу первой схемы И, один вход которой соединен с выходом генератора счетных импульсов, а второй вход - с выходом триггера, два входа которого соединены с двумя соответствующими выходами генератора импульсов, вход которого подключен к входу сброса первого счетчика и к формирователю импульсов запуска синхронизатора РЛС, выходы первого счетчика соединены с первыми входами соответствующих схем И первого блока совпадения, дополнительно введены первая и вторая линии задержки, первый и второй переключатели, вторая и третья схемы И, смеситель сигналов, состоящий из n=1, ..., N схем ИЛИ, второй, третий и четвертый блоки совпадения, состоящие из n=1, ..., N схем И каждый, второй счетчик, схема НЕ, при этом входы первой и второй линий задержки соединены и подключены к первым входам второй и третьей схем И и к выходу приемника РЛС, выход первой линии задержки соединен с первым входом первого переключателя и вторым входом второго переключателя, выход второй линии задержки соединен со вторым входом первого переключателя и первым входом второго переключателя, выход первого переключателя подключен ко второму входу второй схемы И, а выход второго переключателя - к второму входу третьей схемы И, выход второй схемы И соединен со вторыми входами схем И первого блока совпадений, выходы которых подключены к первым входам соответствующих схем ИЛИ смесителя сигналов, вторые входы схем ИЛИ смесителя сигналов соединены с выходами соответствующих схем И второго блока совпадений, первые входы которых объединены и подключены к выходу третьей схемы И, а вторые - к соответствующим выходам второго счетчика, тактовый вход второго счетчика соединен с выходом первой схемы И, а вход разрешения параллельной загрузки - к входу генератора импульсов, параллельные входы предварительной записи кода второго счетчика подключены к соответствующим выходам схем И третьего и четвертого блоков совпадения, первые входы схем И четвертого блока совпадений объединены и подключены к выходу схемы НЕ, вход которой соединен с первыми входами схем И третьего блока совпадений, с управляющими входами первого и второго переключателей и выходом схемы управления периодом запуска синхронизатора РЛС, вторые входы схем И третьего блока совпадений подключены к формирователю кода дальности, соответствующего периоду следования зондирующих импульсов Т1, а вторые входы схем И четвертого блока совпадений подключены к формирователю кода дальности, соответствующего периоду следования зондирующих импульсов Т2.
Сущность изобретения основана на разделении эхо-сигналов, отраженных от целей, для которых выполняется условие однозначного измерения дальности tЗ<TП, и от удаленных целей, для которых tЗ>TП, и измерения времени их запаздывания, причем до удаленных целей с учетом времени между зондирующими импульсами предыдущего периода запуска.
Структурная схема предложенного устройства приведена на чертеже.
Предложенное устройство измерения времени запаздывания в РЛС с вобулированным периодом следования зондирующих импульсов состоит из генератора счетных импульсов 1, первой схемы И 2, первого счетчика 3, триггера 4, генератора импульсов 5, первого блока совпадения 6, состоящего из n=1, ..., N схем И, первой линии задержки 7, второй линии задержки 8, первого переключателя 9, второго переключателя 10, второй схемы И 11, третьей схемы И 12, смесителя сигналов 13, состоящего из n=1, ..., N схем ИЛИ, второго блока совпадения 14, состоящего из n=1, ..., N схем И, второго счетчика 15, третьего блока совпадения 16, состоящего из n=1, ..., N схем И, схемы НЕ 17, четвертого блока совпадения 18, состоящего из n=1, ..., N схем И, соединенных, как показано на чертеже.
Назначение элементов схемы следует из их названия.
Устройство работает следующим образом.
Радиолокационная станция излучает зондирующие импульсы с вобулированным периодом следования. В момент запуска передатчика с формирователя импульсов запуска синхронизатора РЛС поступает импульс, который запускает генератор импульсов 5, обнуляет первый счетчик 3, а во второй счетчик 15 записывает код, с третьего блока совпадений 16 или с четвертого блока совпадений 18. Если время между зондирующими импульсами равно Т1, то управляющее напряжение со схемы управления периодом запуска синхронизатора РЛС, имеющее высокий уровень, откроет третий блок совпадений 16 и во второй счетчик 15 будет записан код, соответствующий времени Т2. При этом на выходе схемы НЕ 17 будет напряжение низкого уровня и четвертый блок совпадений 18 будет закрыт. Если время между зондирующими импульсами равно Т2, то управляющее напряжение со схемы управления периодом запуска синхронизатора РЛС будет иметь низкий уровень и закроет третий блок совпадений 16, при этом на выходе схемы НЕ 17 будет напряжение высокого уровня, которое откроет четвертый блок совпадений 18, что обеспечит запись во второй счетчик 15 кода, соответствующего времени Т1.
Генератор импульсов 5 опрокидывает триггер 4, открывающий первую схему И 2, разрешая прохождение счетных импульсов от генератора счетных импульсов 1 на первый счетчик 3 и второй счетчик 15.
Эхо-сигналы с выхода приемника РЛС поступают на вторую схему совпадения 11 и третью схему совпадения 12, а также на первую линию задержки 7 и вторую линию задержки 8. Первая линия задержки 7 обеспечивает задержку на время T1, вторая линия задержки 8 задерживает на время Т2. Выходы первой 7 и второй 8 линий задержек через первый 9 и второй 10 переключатели подключаются ко вторым входам второй 11 и третьей 12 схем совпадения. Управление первым 9 и вторым 10 переключателями осуществляет напряжение со схемы управления периодом запуска синхронизатора РЛС. Если время между излучаемыми импульсами равно Т1, то на вторую схему совпадения 11 поступают сигналы с первой линии задержки 7, а на третью схему совпадения 12 - со второй линии задержки 8. При этом на выход второй схемы совпадения 11 пройдут эхо-сигналы, отраженные от цели, находящейся в ближней зоне действия РЛС, для которой время запаздывания сигналов меньше периода следования tЗ1<Т1<Т2 [5, с.300], а на выход третьей схемы совпадения 12 - сигналы удаленной цели, для которой время запаздывания t32<T2>T1.
Сигнал с выхода второй схемы совпадения 11 открывает схемы совпадения первого блока совпадений 6, стоящие после первого счетчика 3, и разрешает считывание кода, записанного в первый счетчик 3 к этому времени.
Выходной сигнал третьей схемы совпадения 12 открывает схемы совпадения второго блока совпадений 14 и считывает код, записанный на втором счетчике 15.
Коды времени запаздывания со схем совпадения первого 6 и второго 14 блоков совпадений через схемы ИЛИ смесителя сигналов 13 проходят на выход устройства.
Начальные установки первого 3 и второго 15 счетчиков и перевод триггера 4 в исходное состояние выполняет следующий импульс синхронизации.
Таким образом, устройство позволяет увеличить зону однозначного измерения дальности до цели при работе РЛС с высокой частотой следования зондирующих импульсов.
Предложенное техническое решение является новым, поскольку из общедоступных сведений неизвестны устройства радиолокации, позволяющие измерять дальность до целей, время запаздывания эхо-сигналов от которых превышает период следования зондирующих импульсов РЛС.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы стандартное оборудование, приспособления и материалы широко распространенной технологии.
Предложенное устройство может использоваться в РЛС, применяющих вобуляцию периода следования зондирующих импульсов, и обеспечивать измерение дальности до целей, время запаздывания отраженных сигналов от которых превышает период следования импульсов РЛС.
Источники информации
1. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1983. - 536 с.
2. Защита от радиопомех. Под ред. Максимова М.В. - М.: Сов. радио, 1976. - 496 с.
3. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов. - М.: Радио и связь, 1992. - 304 с.
4. Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004. - 320 с.
5. Защита от радиопомех. Под ред. Максимова М.В. - М.: Сов. радио, 1976. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПСЕВДОКОГЕРЕНТНАЯ РЛС С ВЫСОКОЙ ЧАСТОТОЙ СЛЕДОВАНИЯ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2014 |
|
RU2591049C2 |
| МАТРИЧНЫЙ ПРИЕМНИК | 2009 |
|
RU2422845C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1976 |
|
SU600912A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2007 |
|
RU2350981C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЭНЕРГЕТИЧЕСКОГО ПОТЕНЦИАЛА ИМПУЛЬСНЫХ РЛС | 1977 |
|
SU1840899A1 |
| Радиолокационный измеритель характеристик каналов распространения радиоволн | 1983 |
|
SU1176277A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
Изобретение относится к радиолокационному обнаружению и измерению дальности до целей на фоне пассивных помех и может найти применение в РЛС, использующих высокую частоту следования зондирующих импульсов. Достигаемый технический результат - увеличение зоны однозначного измерения дальности до цели при работе РЛС с высокой частотой следования зондирующих импульсов. Указанный результат достигается за счет того, что заявленное устройство содержит определенным образом соединенные между собой генератор счетных импульсов, генератор импульсов, триггер, три схемы И, два счетчика, четыре блока совпадения, состоящие из n=1, ..., N схем И каждый, две линии задержки, два переключателя и смеситель сигналов, состоящий из n=1, ..., N схем ИЛИ, при этом на выходах схем ИЛИ смесителя сигналов, являющихся выходом устройства, обеспечивается измерение дальности до целей, время запаздывния отраженных сигналов от которых превышает вобулированный период следования зондирующих импульсов РЛС. 1 ил.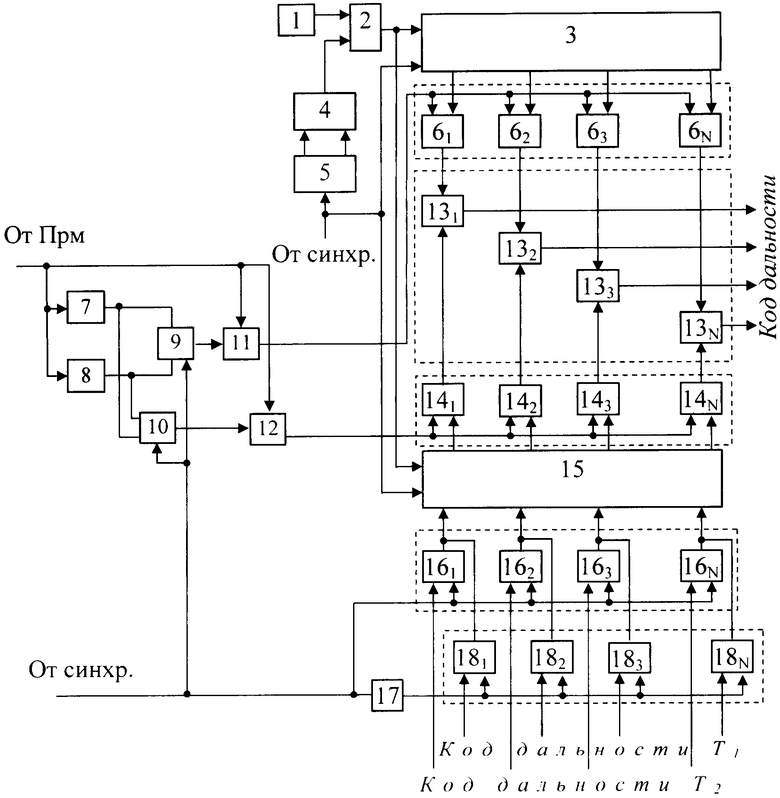
Устройство измерения времени запаздывания сигналов, отраженных от целей, в радиолокационной станции (РЛС) с вобулированным периодом следования зондирующих импульсов, содержащее генератор счетных импульсов, генератор импульсов, триггер, первый счетчик, первую схему И, первый блок совпадения, состоящий из n=1, ..., N схем И, при этом тактовый вход первого счетчика подключен к выходу первой схемы И, один вход которой соединен с выходом генератора счетных импульсов, а второй вход - с выходом триггера, два входа которого соединены с двумя соответствующими выходами генератора импульсов, вход которого подключен к входу сброса первого счетчика и к формирователю импульсов запуска синхронизатора РЛС, выходы первого счетчика соединены с первыми входами соответствующих схем И первого блока совпадения, отличающееся тем, что дополнительно введены первая и вторая линии задержки, первый и второй переключатели, вторая и третья схемы И, смеситель сигналов, состоящий из n=1, ..., N схем ИЛИ, второй, третий и четвертый блоки совпадения, состоящие из n=1, ..., N схем И каждый, второй счетчик, схема НЕ, при этом входы первой и второй линий задержки соединены и подключены к первым входам второй и третьей схем И и к выходу приемника РЛС, выход первой линии задержки соединен с первым входом первого переключателя и вторым входом второго переключателя, выход второй линии задержки соединен со вторым входом первого переключателя и первым входом второго переключателя, выход первого переключателя подключен ко второму входу второй схемы И, а выход второго переключателя - к второму входу третьей схемы И, выход второй схемы И соединен со вторыми входами схем И первого блока совпадений, выходы которых подключены к первым входам соответствующих схем ИЛИ смесителя сигналов, вторые входы схем ИЛИ смесителя сигналов соединены с выходами соответствующих схем И второго блока совпадений, первые входы которых объединены и подключены к выходу третьей схемы И, а вторые - к соответствующим выходам второго счетчика, тактовый вход второго счетчика соединен с выходом первой схемы И, а вход разрешения параллельной загрузки - к входу генератора импульсов, параллельные входы предварительной записи кода второго счетчика подключены к соответствующим выходам схем И третьего и четвертого блоков совпадения, первые входы схем И четвертого блока совпадений объединены и подключены к выходу схемы НЕ, вход которой соединен с первыми входами схем И третьего блока совпадений, с управляющими входами первого и второго переключателей и выходом схемы управления периодам запуска синхронизатора РЛС, вторые входы схем И третьего блока совпадений подключены к формирователю кода дальности, соответствующего периоду следования зондирующих импульсов T1, а вторые входы схем И четвертого блока совпадений подключены к формирователю кода дальности, соответствующего периоду следования зондирующих импульсов Т2, при этом на выходах схем ИЛИ смесителя сигналов, являющихся выходом устройства, обеспечивается измерение дальности до целей, время запаздывания отраженных сигналов, от которых превышает вобулированный период следования зондирующих импульсов РЛС.
| БАКУЛЕВ П.А | |||
| Радиолокационные системы | |||
| Учебник для вузов | |||
| - М.: Радиотехника, 2004, с.240 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2004 |
|
RU2262715C1 |
| УСТРОЙСТВО ДИСКРЕТНОГО ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2007742C1 |
| СПОСОБ ПОСЛЕДЕТЕКТОРНОЙ ОБРАБОТКИ ВОБУЛИРОВАННОЙ ПАЧКИ РАДИОИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237259C2 |
| US 4320397 A, 16.03.1982 | |||
| US 4713664 A, 15.12.1987 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |

