Известны устройства автоматического управления вибрационными и ударновибрационными машинами.
Предложенное устройство отличается от известных тем, что в нем дополнительно установлены основной и вспомогательный импульсные датчики и датчик перемещений со схемой формирования, подключенный к двум схемам И блока реверса и к схемам И и НЕ блока включения, ко вторым входам которых через кипп-реле подключен выход основного импульсного датчика, и выходы схем Я и НЕ подключены к триггеру управления выходным реле включения исполнительного двигателя, а выходы дополнительного и основного импульсных датчиков подключены к двум схемам Я блока реверса, управляющим состоянием триггера реле реверса исполнительного двигателя. Это обеспечивает непрерывное поддержание оптимального или какого-либо заданного режима.
В резонансных машинах угол сдвига фаз между возмущающей силой и перемещением составляет всегда 90°.
У ударновибрадионных машин максимуму ударной скорости всегда соответствует совпадение момента удара со строго определенной для данной мащины фазой возмущаюп ей силы.
машин могут быгь использованы простейшие акселерометры с формирующим устройством, на выходе которого выдается импульс в момент, соответствующий переходу через положение равновесия.
Для фиксации фазы силы при дебалансном вибропроводе целесо-образно использовать два импульсных датчи)са. Один из них устанавливают, таким образом, чтобы в оптимальном режиме работы машины происходило совпадение его импульса с импульсом фазы перемещения. Второй датчик, вспомогательный, устанавливают так, чтобы его сигнал был сдвинут по отношению к первому на 180°.
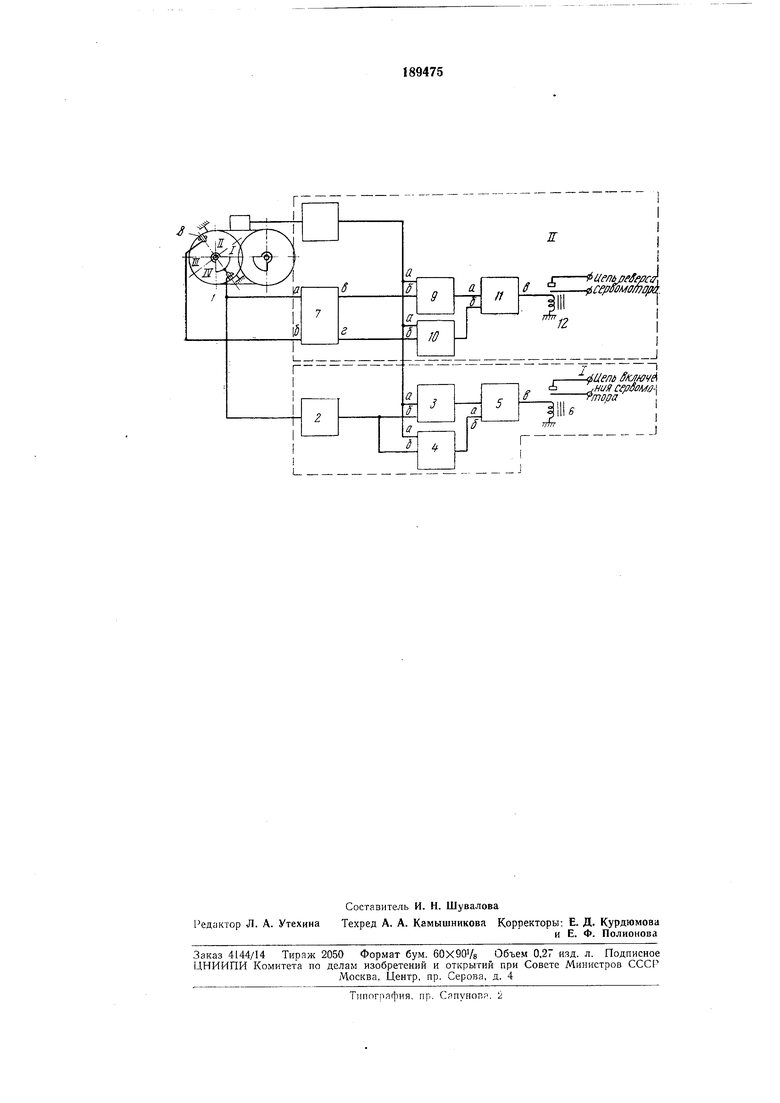
На чертеже показана блок-схема устройства. Она содержит два самостоятельных блока: блок включения / и блок реверса //.
Блок включения работает следующим образом.
Сигнал с основного датчика фазы силы / поступает на вход кипп-реле 2, где он формируется в П-образный импульс, который поступает на вход а схемы антисовпадения 3. Па вход б этой схемы подается сформированпый импульс фазы перемещепия, длительность которого во много раз меньше длительности П-импульса. Эти же два сигнала поступают на схему совпадения 4. фазы перемещения н фазы силы, т. е. импульсов, подаваемых на схемы 3 и 4. При совпадении импульсов па выходе схемы совпадеппй 4 иояг-ляется сигнал, сбрасывающий триггер 5, ка 1и)1ходе схемы антисовпадепий 3 при этом сигнала нет. При несовпадении пмпульсов схема 3 выдает сигнал, который запускает триггер 5, а схема 4 сигнала на выходе не имеет. Таким образом, при несовпадении импульсов фазы силы и фазы перемещения триггер 5 находится в первом устойчивом положении, при котором реле 6, запускающее устройство управления регулируемым параметром машины, включено; при совпадении импульсов триггер 5 находится во втором устойчивом полол ении, при котором реле 6, а следовател1 но, и управляющее устройство выключены. Изменяя с помощью кипп-реле 2 длительность П-импульса фазы силы, подаваемого на схемы сравнения, можно регулировать зону, в которой управляющее устройство выключено. Таким образом регулируется допустимый угол рассогласования фазы силы и фазы перемещения. При несовпадении управляющих импульсов фазочувствительная схема реверса определяет, в какую сторону от совпадения отклонится импульс перемещения, и в соответствии с этим задает направление изменения регулируемого параметр машины. Это происходит следующим образом. Примем за начало отсчета угол поворота дебаланса (фазы силы) положения датчика 1, который установлен таким образом, что в оптимальном режиме работы машины происходит совпадение его и.мпульса с импульсом перемещения. Сигнал датчика 1 перебрасывает триггер 7 в первое устойчивое положение. Сигнал всномогательного датчика фазы силы 8, установленного со сдвигом 180° по отнощению к датчику 1, перебрасывает триггер 7 во второе устойчивое положение. Таким образом, пока дебаланс движется в первой и во второй четвертях, на выходе в триггера 7 имеется постоянное выходное напряжение, а на выходе с -нулевое напряжение. При движении дебаланса в третьей и четвертой четвертях постоянное выходное напряжение имеется на выходе г, а на выходе в - нулевое напряжение. 5 10 15 20 25 30 35 40 45 50 Сигнал с выхода в подается на вход б схемы совпадения 9, а сигнал с выхода г - на вход б схемы совпадения 10. На входы и схем совпадения 9, 10 подаются сформированные импульсы фазы перемещения. Таким образом, если импульс фазы перемещения опережает и.мпульс датчика / (это происходит тогда, когда дебаланс находится D четвертой четверти), на выходе схемы совпадения 9 появляется импульс, который подается на вход а триггера // и перебрасывает его в первое устойчивое положение; если импульс фазы перемещения отстает, то иа выходе схемы совпадения 10 появляется сигнал, который подается на вход б триггера 11 и перебрасывает его во второе устойчивое положение, В первом устойчивом положении триггера // реле 12 включено и задает одно направление изменения регулируемого параметра мащины, во втором устойчивом положении триггера // реле 12 выключено, и при этом задается другое направление изменения регулируемого параметра. Предмет изобретения Устройство для автоматического управления вибрационными и удариовибрационными машинами, содержащее блоки включения и реверса, схемы формирования, триггеры, логические схемы И, НЕ, выходные реле и исполнительный двигатель, отличающееся тем, что, с целью непрерывного поддержания оптимального или заданного режима работы при меняющихся внешних условиях работы машины, в нем дополнительно установлены основной и вспомогательный импульсные датчики и датчик перемещений со схемой формирования, подключенный к двум схемам Я блока реверса и к схемам И и НЕ блока включения, ко вторым входам которых через кипп-реле подключен выход основного импульсного датчика, н выходы схем Я и НЕ подключены к триггеру управления выходным реле включения исполнительного двигателя, а выходы дополнительного и основного импульсных датчиков подключены к двум схемам Я блока реверса, управляющим состоянием триггера реле реверса исполнительного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического измерения фазового положения дебаланса | 1977 |
|
SU720289A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РЕЗОНАНСНЫМИ ВИБРОМАШИНАМИ | 1971 |
|
SU312020A1 |
| ЦИФРОВОЙ ЕМКОСТНЫЙ УРОВНЕМЕР | 1965 |
|
SU174385A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СООБЩЕНИЙ ИСПОЛЬЗОВАНИЕМ РАЗНОСТНОЙ ФАЗОВО-ИМПУЛЬСНОЙМОДУЛЯЦИИ | 1968 |
|
SU217448A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТЕЙ БУМАГОДЕЛАТЕЛЬНЫХ МАШИН | 1972 |
|
SU330474A1 |
| ИЗМЕРИТЕЛЬ АМПЛИТУДНО-ЧАСТОТНЫХ И ФАЗО- ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКОВ | 1968 |
|
SU212362A1 |
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1970 |
|
SU265754A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| Резонансный уровнемер | 1981 |
|
SU974135A1 |