1
Известен регулятор прядения, содержащий регулируемый привод, электронную схему управления, выполненную в виде задающего устройства, интегратора и блока сравнения, и датчики обрыва. Однако известный регулятор прядения не имеет обратных связей по регулируемой величине - обрывности, что не позволяет непрерывно корректировать процесс прядения в зависимости от колебаний обрывности.
Целью изобретения является повышение производительности труда.
Для этого регулятор прядения снабжен устройством обегающего контроля, которое выполнено в виде подвижной каретки с установленными на ней детектором незаправленных веретен и соленоидом и электронного блока выделения обрыва, причем в электронной схеме управления блок сравнения выполнен в виде реверсивного счетчика, один вход которого связан с блоком выделения обрыва, а другой - с задающим генератором, а выход связан с регулируемым приводом.
Кроме того, подвижная каретка может быть связана с приводом посредством гибкой связи и барабана, причем барабан снабжен плоскими спиральными пружинами-проводниками,
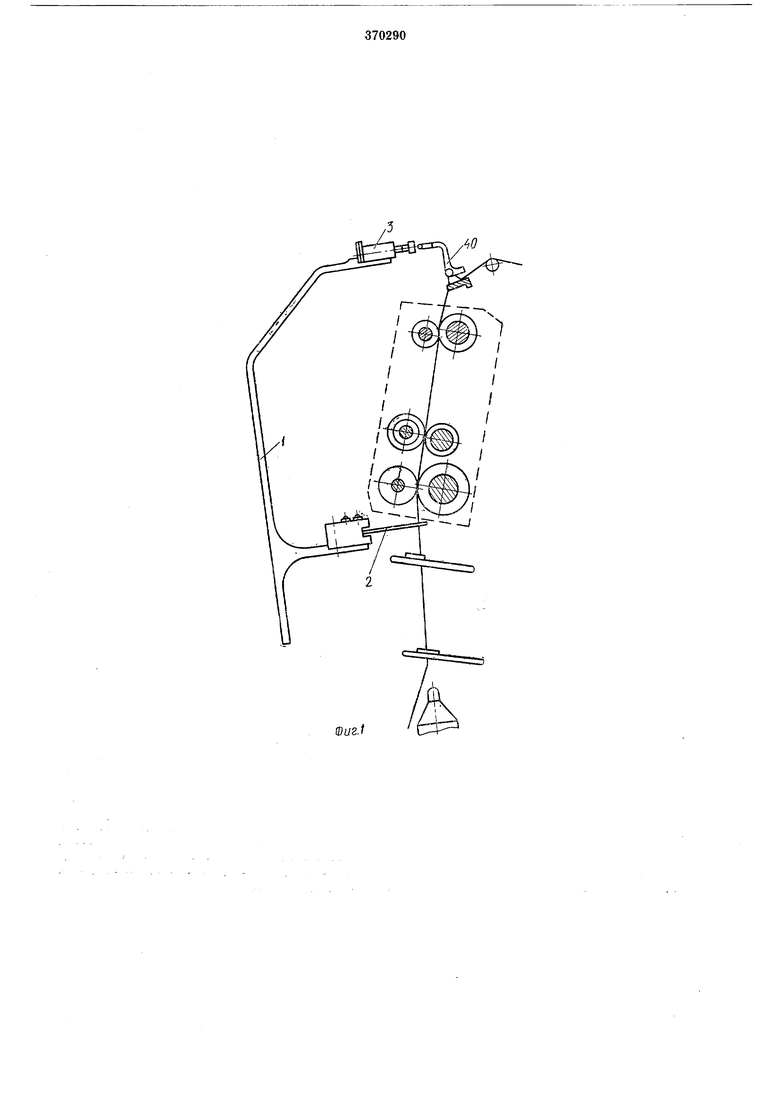
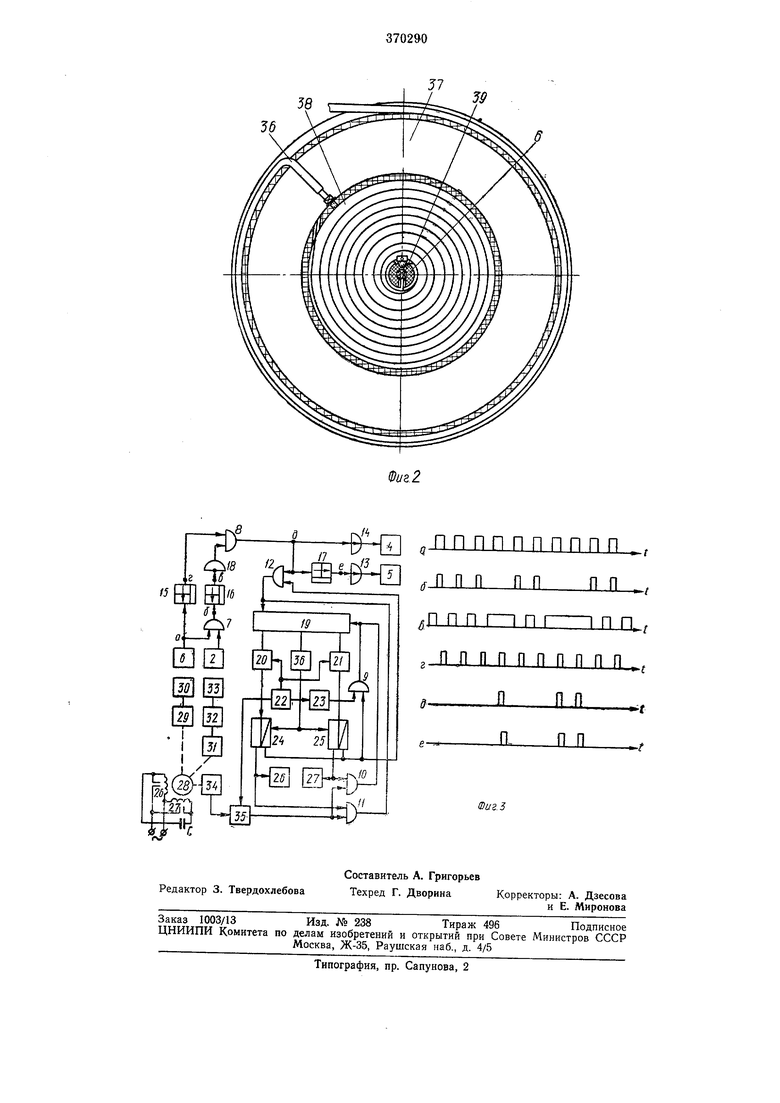
На фиг. 1 изображена принципиальная схема контроля незаправленных веретен; на фиг. 2 - барабан для привода каретки устройства обегающего контроля; на фиг. 3 - блок-схема предлагаемого регулятора прядения.
Регулятор содержит устройство обегающего контроля, которое включает в себя каретку 1, перемещаемую вдоль фронта веретен, датчик 2 обрыва ровницы и соленоид 3, снабженный двумя обмотками 4 и 5. Электронная схема управления состоит из датчика 6 угла
поворота, схем 7-12 совпадения, усилителей 13 и 14, одновибраторов 15, 16 и 17, инвертора 18, реверсивного счетчика 19, дещифраторов 20 и 21, задатчика 22, генератора 23 импульсов, триггеров 24 и 25 и двух реле 26
и 27.
Кроме того, регулятор содержит регулируемый привод, который состоит из двигателя 28, вариатора 29 и вытяжного прибора 30 в том случае, если управляющим воздействием является крутка. Если управляющим воздействием является скорость веретен, привод включает в себя датчик 31 угла поворота с аналого вым выходом по напряжению, щиротно-иы пульсный модулятор 32 и тиристорный при
вод 33.
В регуляторе имеется обратная связь по положению исполнительного механизма, состоящая из датчика 34 угла поворота, кинематически связанного с валом управляемого
двигателя 28 и соединенного с регулируемым
делителем 35 частоты. Подвижная каретка / связана гибкой токонесущей передачей 36 с конечным барабаном 37, в котором установлены плоские нружины-проводники 38, один конец которых связан с проводниками-токосъемниками, выведенными на неподвижную ось барабана 39.
Каретка 1 перемещается возвратно-поступательно вдоль фронта контролируемых веретен. На каретке установлен детектор незаправленных веретен (датчик 2 обрыва), представляющий собой поворотный рычаг, закрепленный на растяжках из полимерных нитей, который отклоняется от нейтрального положения при наличии нити. При этом второй конец рычага перемещается в прорези бесконтактного датчика напряжения, выдающего сигнал о наличии нити. На каретке / также укреплен соленоид 3, который снабжен двумя управляющими обмотками 4 и 5. Якорь соленоида в случае обрыва ровницы воздействует на сухарик 40, который установлен напротив питающего цилиндра вытяжного прибора каждого веретена. Сухарик 40 поворачивается, ровннца заклинивается, и питающая пара вытяжного прибора обрывает ее. Возврат сухарика в первоначальное положение происходит после ликвидации обрыва.
Передача информации об обрыве осуществляется при помощи гибких проводов, совмещенных с тяговым тросом, наматывающихся на конечный барабан 37. Во избежание скользящих контактов в барабане имеются спиральные плоские пружины-токопроводники 3S (по числу проводов), один конец которых прикреплен к проводникам-токосъемникам, выведенным на неподвижную ось 39 барабана 37, а другой конец соединен с концом провода, наматывающегося на барабан.
При вращении барабана спиральные пружины-токопроводники имеют возможность закручиваться (раскручиваться), осуществляя постоянный контакт подвижного проводника, соединенного с детектором незаправленных веретен 2 и соленоидом 3, с неподвижным выводом. Принудительное вращение конечный барабан 37 получает от реверсивного двигателя или от главной передачи прядильной мащины. При отсутствии обрыва щуп датчика 2 отклоняется от состояния равновесия. При этом сектор, установленный на другом конце щупа датчика 2, выходит из паза бесконтактного датчика и вызывает появление электрического импульса на выходе детектора незаправленных веретен. Этот импульс подается на схему 7 сравнения. На второй вход этой схемы одновременно подаются импульсы с датчику 6 угла поворота.
Датчик угла поворота приводится в движение через редуктор от привода, перемещающего каретку /. Коэффициент редукции подобран так, чтобы при прохождении датчика обрыва мимо веретена на выходе датчика 6 угла поворота появлялся импульс нанряжения. В этом случае при прохождение датчика обрыва мимо необорванной пряжи на оба входа схемы 7 совпадения поступают потенциалы, соответствующие единице. Одновибратор 15 опрокидывается задним фронтом импульса, проходящего с датчика 6 угла поворота. При этом на вход схемы 8 совпадения с одновибратора 15 подается сигнал, соответствующий единице. В устойчивом состоянии одновибратора 16 с выхода инвертора 18 на
вход схемы 8 совпадения подается отрицательный потенциал, соответствующий единице. При опрокидывании одновибратора 16, т. е. при появлении единицы на выходе схемы 7 сравнения, на вход схемы 8 совпадения подается потенциал, соответствующий нулю. Длительность импульса с датчика угла поворота должна быть больщей, чем длительность импульса на выходе датчика обрывов, а длительность импульса с одновибратора 16 должна быть больше, чем интервал времени, равный сумме длительности импульса с датчика обрывов, одновибратора 15 и интервала времени между ними. В этом случае при отсутствии обрыва нити в момент прохождения датчика обрыва мимо веретена с элемента 7 на вход одновибратора 16 поступает единичный импульс, опрокидывающий его и снимающий единичный потенциал со входа схемы 8 совпадения.
Задним фронтом импульса, приходящего с датчика угла поворота, опрокидывается одновибратор 15 и на его выходе появляется единичный потенциал. Однако при выбранных соотнощениях времени выдержек одновибраторов (см. потенциальную диаграмму на фиг. 3) исключается возможность одновременного появления единичного потенциала на обоих входах схемы 8 совпадения. При обрыве пряжи в момент прохождения
датчика обрывов мимо веретена с оборвавщейся пряжей единичный импульс поступает только с датчика угла поворота, а следовательно, перебрасывается только один одновибратор 15. На выходе схемы 8 совпадения
появляется единичный импульс длительностью, равной времени выдержки одновибратора 15, который вызывает срабатывание исполнительного механизма обрезания ровницы при обрыве пряжи. При обрыве нити импульс напряжения со схемы 8 совпадения через усилитель 14 подается на катущку 4 прямого хода якоря соленоида, вызывая перемещение сердечника, приводящего в действие обрезающее устройство.
Одновибратор 17 срабатывает на задний фронт импульса напряжения, приходящего со схемы 8 совпадения, подавая через усилитель 13 напряжение на катущку 5 обратного хода, которая возвращает сердечник соленоида 3 в
исходное положение.
При отсутствии нити импульс с датчика обрыва через схему 12 совпадения поступает также на суммирующую щину реверсивного счетчика 19. На щину вычитания счетчика 19
поступают через схему 9 совпадения импульсы с задающего генератора 23 с частотой, соответствующей интенсивности обрывов при нормальных технологических условиях. При наличии рассогласования между интенсивностью текущей обрывности и интенсивностью импульсов задающего генератора реверсивный счетчик начинает заполняться. Число ячеек реверсивного счетчика определяется максимально возможной зоной нечувствительности регулятора и равно количеству ячеек, необходимых для записи числа, соответствующего зоне нечувствительности.
Номинальный уровень обрывности, задаваемый генератором 23, зависит от параметров технологического процесса (качества сырья, номера пряжи, используемого оборудования и т. п.), поэтому для настройки регулятора предусмотрено изменение частоты задающего генератора при помощи задатчика 22. В связи с тем, что зона нечувствительности регулятора определяется заданной интенсивностью обрывности пряжи, для настройки необходимой зоны нечувствительности в регуляторе используется тот же задатчик 22, представляющий переключатель, коммутирующий соответствующие выходы дещифраторов 20 и 21 с входами триггеров 24 и 25. Триггеры 24 и 25, в выходных цепях которых находятся реле 26 и 27, предназначены для включения реверсивного двигателя 28 и перебрасываются только в том случае, если разность между числом импульсов с датчика обрывов и задающего генератора превысит зону нечувствительности.
При неравенстве интенсивности импульсов с датчика обрывов, частоте задающего генератора 23 реверсивный счетчик начинает в зависимости от знака рассогласования очищаться или заполняться. Если записанное в счетчик 19 число, соответствующее рассогласованию между текущей обрывностью и заданной, превыщает число, равное половине зоны нечувствительности, то в зависимости от знака рассогласования на выходе одного из дещифраторов 20 или 21 появится единичный потенциал, перебрасывающий соответствующий триггер 24 или 25, которые включают реле 26 или 27. Реле 26 или 27 подключают соответствующие обмотки реверсивного двигателя 28, кинематически связанного с винтом цепного вариатора 29, меняющего число оборотов (крутку пряжи) вытяжного прибора прядильной мащины. Изменение крутки пряжи приводит к изменению обрывности. При переброске одного из триггеров 24 или 25 на входе схем 9, 12 совпадения появляется нулевой потенциал, отключающий датчик обрывов и задающий генератор от щин реверсивного счетчика 19. С валом реверсивного двигателя
28 связан импульсный датчик 34 угла поворота, сигналы с которого через регулируемый делитель 35 частоты подаются на входы двух схем // II 10 совпадения. Вторые входы схем 10 н 11 совпадения подключены к выходам триггеров 24 и 25. Выходы схем 10 - 11 совпадения соединены с щинами сложения и вычитания реверсивного счетчика 19. Элементы 34, 35, 10 и 11 образуют цепь отрицательной обратной связи по положению винта вариатора. При вращении исполнительного двигателя открывается только одна из схем 10 и // совпадения сигналом соответствующего триггера 24, 25. Двигатель вращается до тех пор, пока количество импульсов, поступающее в счетчик 19 через цепь обратной связи, не вернет его в исходное состояние. В этот момент на выходе дешифратора 36 появится единичный сигнал, сбрасывающий
один из триггеров 24, 25 в исходное состояние. При этом схемы 9 и 12 совпадения подключают датчик обрывов и задающий генератор к щинам реверсивного счетчика, а схемы 10 и 11 отключают цепь обратной связи по положению исполнительного механизма. Коэффициент усиления обратной связи устанавливается при помощи делителя 35 частоты.
В том случае, если управляющим воздействием регулятора является скорость веретена,
управляющий двигатель вращает второй датчик 5/ угла поворота с аналоговым выходом по напряжению, сигнал с которого является регулирующей величиной привода, работающего в комплекте с широтно-импульсным модулятором 32.
Предмет изобретения
1. Регулятор прядения, содержащий регулируемый привод, электронную схему управления, выполненную в виде задающего устройства, интегратора и блока сравнения, и датчики обрыва, отличающийся тем, что, с целью повышения производительности труда, он
снабжен устройством обегающего контроля, которое выполнено в виде подвижной каретки с установленными на ней детектором незаправленных веретен и соленоидом и электронного блока выделения обрыва, причем в электронной схеме управления блок сравнения выполнен в виде реверсивного счетчика, один вход которого связан с блоком выделения обрыва, а другой - с задающим генератором, а выход связан с регулируемым приводом.
2. Регулятор по п. 1, отличающийся тем, что подвижная каретка связана с приводом посредством гибкой связи и барабана, причем барабан снабжен плоскими спиральными пружинами-проводниками.
Фиг.9
4/7
38
36
39
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления прядильной машиной | 1986 |
|
SU1371992A1 |
| Регулятор прядения | 1972 |
|
SU438734A1 |
| Устройство для прекращения питанияРОВНицЕй ВыТяжНОгО пРибОРА пРядильНОйМАшиНы | 1979 |
|
SU846617A1 |
| Система контроля производительности машин с несколькими рабочими органами | 1978 |
|
SU753942A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРЯДИЛЬНОЙ Л1АШИНОЙ | 1973 |
|
SU362087A1 |
| Устройство для контроля обрыва двух одновременно перемещающихся волокнистых продуктов | 1989 |
|
SU1648998A1 |
| УСТРОЙСТВО ДЛЯ ДОПУСКОВОГО КОНТРОЛЯ СУММЫ (РАЗНОСТИ) ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1972 |
|
SU421009A1 |
| Регулятор угла опережения зажигания | 1984 |
|
SU1321899A1 |
| Устройство для контроля обрывов нитей | 1975 |
|
SU609793A1 |
| Устройство для управления прядильной машиной | 1982 |
|
SU1070227A1 |