Известно устройство для управления резонансными вибромашинами, включающее механизм учета фазы силы с датчиками.
Однако такое устройство не позволяет работать на любой ветви резонансной характеристики вибромашины и не обеспечивает непрерывного регулирования по заданной программе амплитуды параметров работы вибромашины.
Описываемое устройство не имеет этих недостатков и отличается от известного тем, что оно выполнено с механизмом учета отклонения заданного параметра, имеющим датчик, подключенный к задатчику, соединенному посредством усилителя со смонтированным в устройстве выходным реле амплитуды.
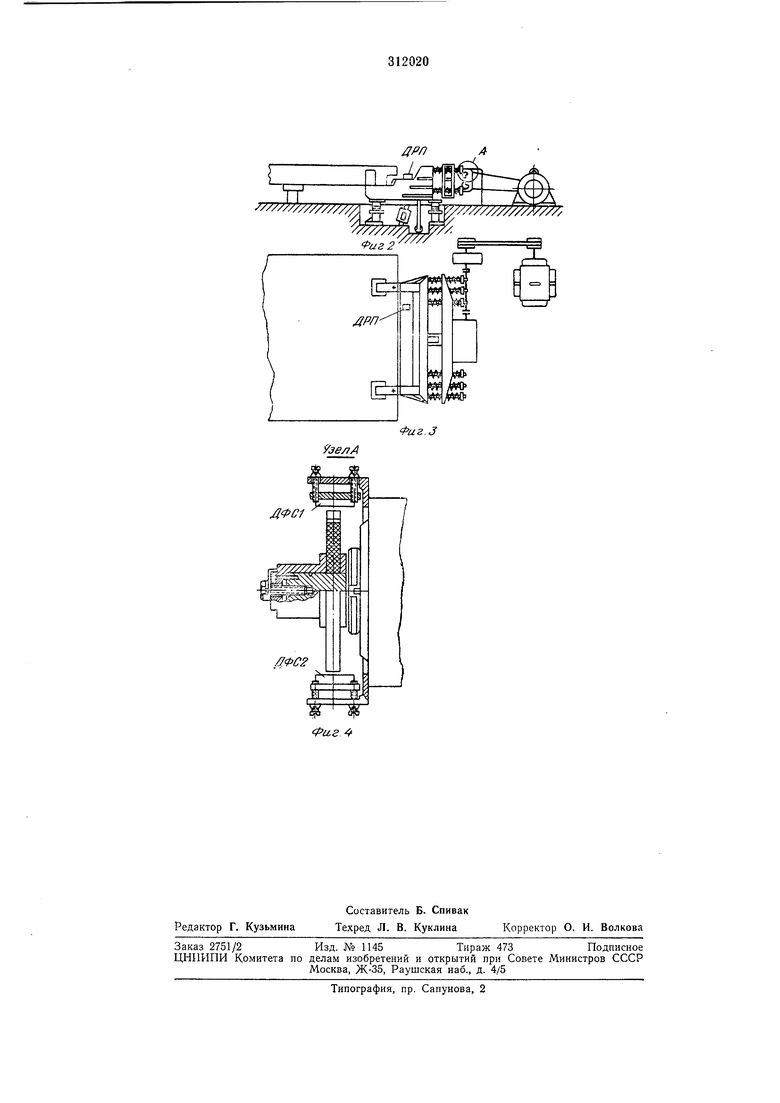
На фиг. 1 приведена блок-схема описываемого устройства; на фиг. 2 - схема установки устройства на резонаторной плите, вид сбоку; на фиг. 3 - то же, вид в плане; на фиг. 4 - узел А на фиг. 2.
Блок-схема устройства для управления резонансными машинами содержит три самостоятельных узла: механизм учета фазы силы с датчиками, механизм учета отклонения регулируемого параметра и исполнительный механизм.
ДФС1 и ДФС2. Один из датчиков устанавливают таким , чтобы его импульс совпал с моментом перехода смещения механической системы через положение равновесия,
при сдвиге фаз между вынуждающей силой и смещением, равном 90° (при резонансе механической системы).
Второй датчик устанавливают так, чтобы его импульс был сдвинут на 180° по отношению к первому. Сигналы с датчиков фазы силы поступают на входы триггера Тг1 с двумя устойчивыми состояниями и перебрасывают его дважды за оборот вала дебаланса. Уровни напряжений П-образной формы поступают
с выходов триггера Тг1 на входы логических ячеек И1 и И2. На другие входы этих ячеек поступает узкий импульс, сформированный при помощи усилителя У и формирователя Ф из сигнала, снимаемого с датчика регулируемого параметра ДРП. В результате сложения импульсов с формирователя Ф и триггера Тг1 на выходе одной из ячеек появляется импульс. Импульсы с выхода каждой ячейки поступают на соответствующие входы триггера Гг2 с двумя устойчивыми состояниями. К одному из выходов триггера Тг2 подключено реле РФ. Если рабочая точка находится на дорезонансном участке, то импульс снимается только с ячейки И2. Этот импульс соответствует таего выходе напряжение отсутствует и реле РФ отключено. При переходе рабочей точки на зарезонансную ветвь сигнал на выходе ячейки Я2 исчезает, а на выходе ячейчи И появляется, что приводит к перебросу триггера Тг2 во второе устойчивое состояние, вследствие чего на его выходе появляется напряжение и реле РФ включается. Контакты этого реле переключают направление изменения регулирующего воздействия.
Механизм учета отклонения регулируемого параметра работает следующим образом.
Сигнал с датчика регулируемого параметра ДРП поступает на задатчик ЗА, в качестве которого может быть использовано, например, переменное сопротивление, включенное по схеме потенциометра. Сигнал, снимаемый с движка потенциометра, поступает на вход стабильного усилителя У, выход которого подключен к нуль-органу, имеющему релейную характеристику с регулируемым коэффициентом возврата, служащим для изменения ширины зоны нечувствительности. На выходе нуль-органа включено оперативное реле РА, контакты которого совместно с контактами реле РФ управляют исполнительным механизмом изменения регулирующего воздействия. В качестве последнего могут быть использованы скорость приводного двигателя, жесткость системы и т. д.
Узел учета отклонения регулируел/юго параметра
Пусть рабочая точка находится на дорезонансном участке кривой и величина регулируемого параметра ниже заданной, тогда на выходе нуль-органа НО появится напряжение, что приведет к включению реле РА. Последнее включит исполнительный механизм, который будет увеличивать значения регулирующего воздействия, например, скорость приводного двигателя до тех пор, пока величина регулируемого параметра не достигнет верхней границы зоны нечувствительности. В этот момент на выходе НО напряжение исчезает и релеРЛ отключается, вследствие чего исполнительный механизм уменьшает скорость приводного двигателя до тех пор, пока величина регулируемого параметра не достигнет нижней границы зоны нечувствительности. Такое регулирование в пределах зоны нечувствительности продолжается в течение всего цикла вибрирования.
Предмет изобретения
Устройство для управления резонансными вибромашинами, включающее механизм учета фазы силы с датчиками, отличающееся тем, что, с целью обеспечения изменения амплитуды регулируемого параметра по заданной программе, оно выполнено с механизмом учета отклонения заданного параметра, имеющим датчик, подключенный к задатчику, соединенному посредством усилителя со смонтированным в устройстве выходным реле амплитуды.
ДРП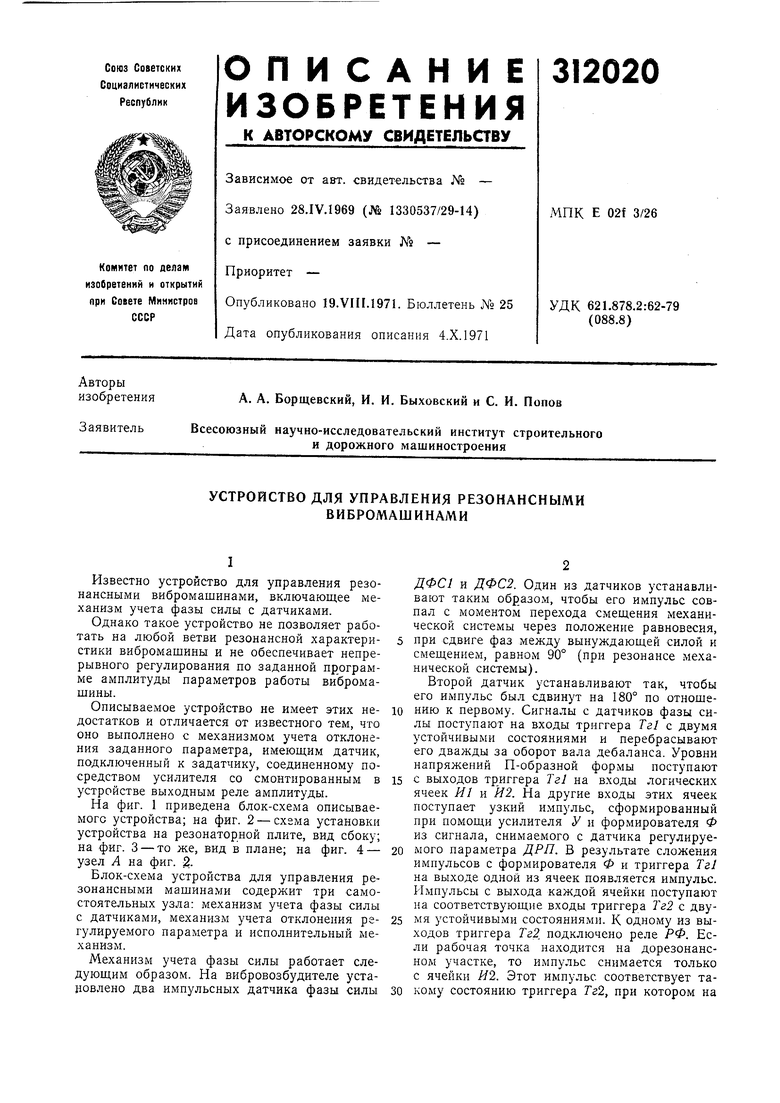
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Устройство для сортировки деталей и узлов на группы | 1974 |
|
SU558721A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Частотно-импульсный регулятор температуры | 1981 |
|
SU1010606A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2643179C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |