Известны снособы введепия кинематических поправок при обработке воспроизводимых сейсмических записей в методе отраженных волн, осуществляющиеся путем смещения магнитных головок. Эти способы не обеспечивают высокой точности и усложняют используемую аппаратуру.
Отличие предложенного способа заключается Б том, что изменяют задержку колебаний во времени в процессе перезаписи одного канала путем переключения числа звеньев электрической линии, а при перезаписи следующих каналов время задержки каждого звена н линии в целом изменяют посредством изменения величины тока подмагничивания, пропускаемого через специальные обмотки дросселей электрической линии.
Это позволяет повысить точность измерений.
На фиг. 1 представлена блок-схема устройства, поясняющая предложенный способ; на фиг. 2 - схема электрической линии задержки; на фиг. 3 и 4 - годографы волн.
Магнитная лента, на которой в полевых условиях произведена запись, пакладывается на барабан 1 (фиг. 1), который приводится во вращение двигателем 2 через редуктор 3. На этой же оси установлен второй барабан 4, па который накладывается чистая магнитная лепта. Воспроизведение колебаний с барабана 1
производится поканально: шаговый искатель 5 поочередно после каждого оборота барабана / подключает к входу усилителя 6 магнитные головки 2i, г... йбо. Усиленные колебания подаются на вход электрической линии 7 задержки, представляющей собой последовательное соединение П-образных звеньев LC-фильтра нижних частот (фиг. 2). Каждый дроссель линии помимо основной имеет также обмотку подмагничивания. Обмотки подмагничивания соединяются последовательно. Если через них пропустить ток 1„, то величины самоиндукций всех дросселей уменьшаются и в соответствии с формулами
и„ - yiC(1)
«-1.8(2)
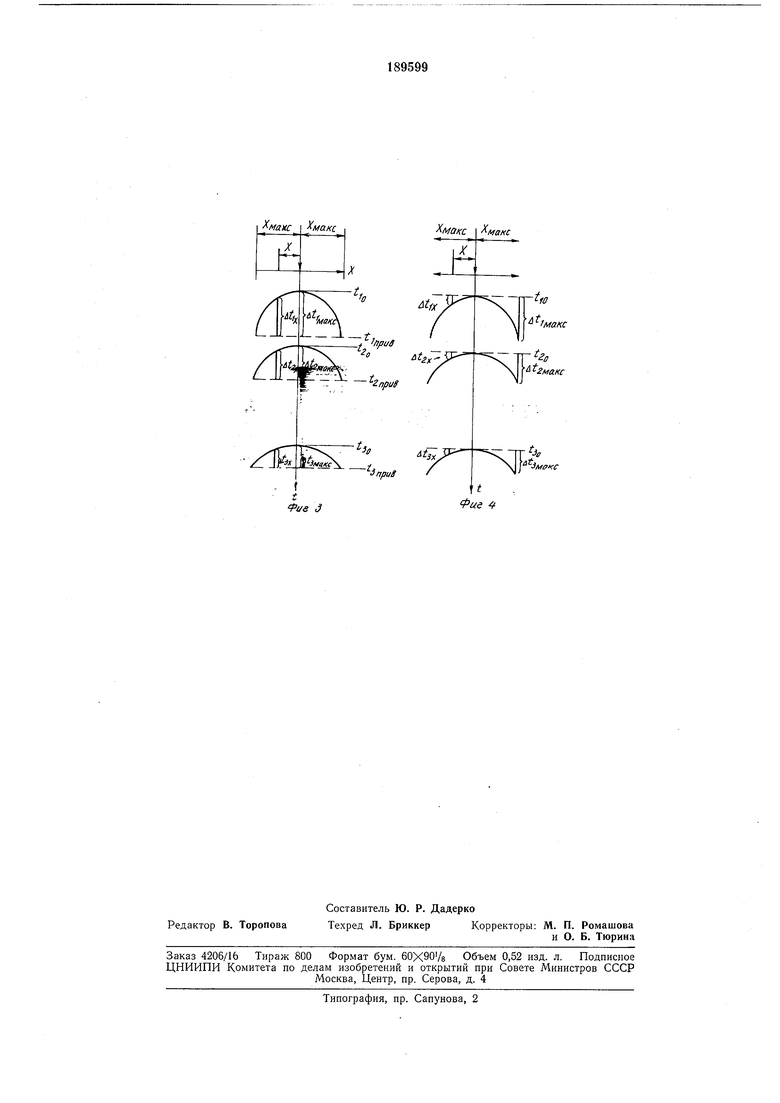
уменьшается время запаздывания, создаваемое каждым звеном и всей линией в целом. Линия задерлски имеет п выходов по числу звеньев (выходы сделаны после каладого звена). С осью вращения барабанов (фиг. 1) механически связан движок программного переключателя 8, с помощью которого при вращении барабанов время заназдывания, создаваемое линией, изменяется в соответствии с формулой (2) путем изменения числа используемых звеньев. Число контактов программного переключателя намного превышает число выходов линии задержки. Поэтому имеется возможность в каждом районе работ соединить -все выходы линии задержки с такими положениями программного переключателя, чтобы для любого момента времени запаздывание, создаваемое линией, было равно максимальной величине кинематической поправки, которую требуется ввести на данном времени. Если пункт взрыва расположен в центре установки сейсмоприемников, то в любое время (1о ; 2о ; зо )максимальная поправка
(А 1дйте; А4л(ате; Д з-иак) требуется для центрального сейсмоприемпика, установленного на пункте взрыва (фиг. 3). В этом случае с помощью электрической линии задержки можно осуществить при- дение нормального годографа не к 1„ , 2„ , 4„ ..., а к временам регистрации отражений на наиболее удаленных от пункта взрыва приборах (impue, f npue, зпрпв...). При -перезаписи колебаний любого другого канала в любое время.( ; /2„ ; 4„ ..) необходимо вводить тем меньшие запаздывания (fix ; f-2x, t-ix ...), чем на большем расстоянии X точка наблюдения находится от пункта взрыва. Легко показать, что отношение величин необходимых поправок для одного годографа выражается формулой
-,/.., 2-
1й V
1 + ;
,2 .2 ср 0
Раскладывая выражения для квадратных корней в ряд и ограничиваясь первыми членами ряда, найдем приближенное выражение
,2„.,
Ai.
у г2
А,
Из выражения (4) найдем;
2
макс Д4 А/
Отсюда следует, что при заданном расстоянии X от пункта взрыва величина кинематической поправки может быть для любого момента времени определена путем умнон ения максимальной для данного времени величины ноправки на постоянный множитель, не зависящий от времени.
Это дает возможность ввести необходимые поправки при перезаписи любого канала (фиг. 1) путем использования одной и той же программы переключения числа звеньев линии. При перезаписи каждого канала от источника 9 постоянного напряжения через обмотки подмагничивания пропускается такой ток /„, чтобы запаздывание, вносимое каждым звеном линии и всей линией в целом, уменьшалось в требуемое число раз.
поворотом барабана на этот регулятор поступает через контакты // короткий импульс, запускающий устройство для изменения величины тока нодмагничивания.
При изменении величины тока подмагничиваиия величина волнового сопротивления линии изменяется в соответствии с формулой
/Т
V
(6)
Поэтому для согласования линии, чтобы избежать появления отражений, в схему включается специальный переключатель 12 нагрузок, который при каждом обороте барабана переключается тем же импульсом, что и регулятор тока, и изменяет величину нагрузки линнй по выходу в соответствии с формулой (6). Колебания с движка программного переключателя 8 поступают на вход усилителя 13, имеющего очень большое входное сопротивление, так, чтобы его подключение не создавало в линии отражений. Выход усилителя 13 через шаговый искатель подключается поочередно к
магнитным головкам барабана 4. Тем самым на магнитной ленте, расположенной на барабане 4, записывается о - сейсмограмма с введенными кинематическими поправками.
Описываемый способ позволяет вводить кинематические поправки очень точно, несмотря на то, что формулы (4) и (5) являются приближенными. Как показали произведенные расчеты, нанбольшая точность получится в том случае, если при выборе тока подмагничивания воспользоваться не приблилсенной формулой (5), а точной формулой (3) для наименьшего обрабатываемого времени (олин) В этом случае
AL. Д
(7)
Очевидно, что по формуле (7) поправки будут вводиться совершенно точно для всех каналов в наименьшем времени ( в других временах для всех каналов, кроме центрального, поправки будут вводиться с ошибками, но ошибка не превысит 1-2 мсек при максимальной величине поправки до 150лгсел;, что вполне приемлемо.
Легко видеть, что /о - сейсмограмма, полученная после введения поправок по описанному способу, будет иметь нелинейный временной масштаб (см. фиг. 3). Этого недостатка можно избежать, если
вводить поправки при воспроизведении магнитиой ленты путем обратного церемещения от конца к началу, т. е. от больших времен к малым. В этом случае (фиг. 4), можно сделать приведение к 1„ , 4 . Зо и т. д. без наНаибольшие поправки будут для наибол удалеииых каналов. Для любого канала, находящегося на уд лении, точная поправка Д/ Д/, Приближенно А/, Очевидно, что описанный способ введен поправок пригоден и для этого случая. Предмет изобретения Способ введения кинематических поправ при обработке сейсмических записей, прои веденных на магнитную ленту, но методу отраженных волн, отличающийся тем, что, с целью повышения точности 1измерений при воспроизведении колебаний путем перемеш,ения ленты в прямом или обратном направлениях, задержку во времени осуш,ествляют с помощью электрической линии, число звеньев которой изменяют в процессе перезаписи одного канала с помощью программного переключателя, механически связанного с эсью вращения барабана с магннтной лентой, а при переходе с перезаписи одного канала на другой время задержки каждого звена и линии в целом изменяют с помощью изменения величины тока подмагничивания, пропускаемого через дополнительные обмотки дросселей электрической линии так, чтобы поправки для любого канала вводились по точным формулам на минималыюм времени.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВВЕДЕНИЯ КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1967 |
|
SU202533A1 |
| Устройство для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов | 1976 |
|
SU614405A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМОГРАММ | 1971 |
|
SU311237A1 |
| СПОСОБ ПАРАЛЛЕЛЬНОГО ВВОДА КИНЕМАТИЧЕСКИХ | 1971 |
|
SU290255A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВВЕДЕНИЯ КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1963 |
|
SU224824A1 |
| §СеСОЮЗНАЛ J if'ATF!iTl50-T?XHWSC««| | 1973 |
|
SU388238A1 |
| Устройство автоматической обработки сейсморазведочных данных и построения сейсмических глубинных разрезов | 1976 |
|
SU735954A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОБРАБОТКИ СЕЙСМИЧЕСКИХМАТЕРИАЛОВ | 1970 |
|
SU269510A1 |
| СПОСОБ СУММИРОВАНИЯ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 1970 |
|
SU270279A1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ИЗУЧЕНИЯ ОСАДОЧНОГО ЧЕХЛА ПРИ НАЛИЧИИ СИЛЬНО ИЗРЕЗАННЫХ АКУСТИЧЕСКИ ЖЕСТКИХ ГРАНИЦ (ВАРИАНТЫ) | 2003 |
|
RU2221262C1 |
V
J 2
Bxsd
макс I макс
fue J
.
J/ufffi:
Фие «
