Изобретение относится к области сейсмической разведки и быть использовано в аналоговой сейсмообрабатывающей аппаратуре.
Известен способ обработки полевых сейсмограмм, заключающийся в том, что переменные tBo времени кинематические поправки вводят по произвольным и независимым программам в записи всех зарегистрированных на сейсмограмме колебаний, путем поканального ввода их во все трассы сейсмограммы. Подобный способ введения поправок применен в сейсмообрабатывающей мап1ине ПСЗ-4.
Недостатком известного способа является то, что кинематические и другие поправки вводят последовательно (трасса за трассой), а операция суммирования сигналов, в которые введены поравюи, осуществляется отдельно. Это приводит к значительному замедлению процесса обработки по способу дифрагированных волн, способу О.Г.Т и др.
Цель данного изобретения заключается в повыщении точности н скорости ввода поправок.
Согласно изобретению указанная цель достигается тем, что каждый сигнал подают через соответствующую группу ключей к отводам линии задержки, в которой происходит суммирование сигналов, а ключами управляют импульсы, поступающиеИЗ обрабатывающей мащины.
так, что в любой момент времени открыт лищь один ключ из каждой группы, а остальные закрыты. Кроме того, для повыщення скорости ввода поправок изменяют величину задержки одновременно всех звеньев линии.
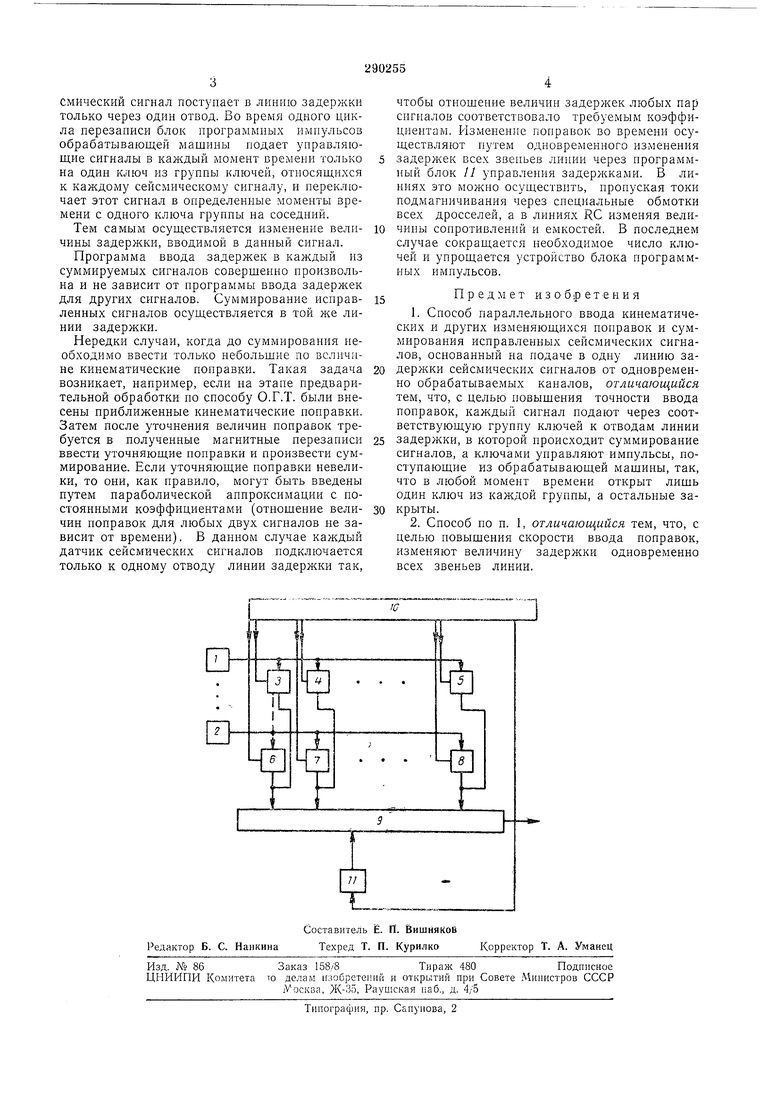
На чертеже представлена блок-схема устройства для осуществления предложенного способа.
На чертелче обозначены: 1,2 - датчики сейсмических сигналов; 3-S - электронные ключи; 9 - электрическая линия задержки; 10 - блок программных импульсов обрабатывающей мащины; 11 - программный блок управления задер.жками.
Рассмотрим действие схемы. Операция ввода кннематнческих поправок и одновременного суммирования исправленных сейсмических сигналов осуществляется следующим образом. Все суммируемые сигналы, полученные от датчиков /, 2 через свои индивидуальные ключи 3-8 поступают на отводы одной и той же линии задержки 9. Электронные ключи управляются сигналами из блока 10 программных импульсов обрабатывающей мащины. Управление
электронными ключами осуществляется таким образом, что в каждый данный момент времени открыт только один ключ из каждой группы ключей, относящихся к каждому входному сейсмическому сигналу, а все остальные
смический сигнал поступает в линию задержки только через один отвод. Во время одного цикла перезаниси блок программных импульсов обрабатывающей машины подает управляющие сигналы в каждый момент времени только на один ключ из группы ключей, относящихся к каждому сейсмическому сигналу, и переключает этот сигнал в определенные моменты времени с одного ключа группы на соседний.
Тем самым осуществляется изменение величины задержки, вводимой в данный сигнал.
Программа ввода задержек в каждый из суммируемых сигналов совершенно произвольна и не зависит от программы ввода задержек для других сигналов. Суммирование исправленных сигналов осуществляется в той линии задержки.
Нередки случаи, когда до суммирования необходимо ввести только небольшие по величине кинематические поправки. Такая задача возникает, например, если на этапе предварительной обработки по способу О.Г.Т. были внесены приближенные кинематические поправки. Затем после уточнения величин поправок требуется в полученные магнитные перезаписи ввести уточняющие поправки и произвести суммирование. Если уточняющие поправки невелики, то они, как правило, могут быть введены путем параболической аппроксимации с постоянными коэффициентами (отношение величин поправок для любых двух сигналов не зависит от времени). В данном случае каждый датчик сейсмических сигналов подключается только к одному отводу линии задержки так.
чтобы отпошеиие величин задержек любых пар сигналов соответствовало требуемым коэффициентам. Изменение поправок во времени осуществляют путем одновременного изменения задержек всех звеньев липни через программный блок // управления задержками. В линиях это можно осуществить, пропуская токи подмагничивания через специальные обмотки всех дросселей, а в линиях RC измеияя величины сопротивлений и емкостей. В последнем случае сокращается необходимое число ключей и упрощается устройство блока программных импульсов.
Предмет и з О б ip е т е н и я
1.Способ параллельиого ввода кинематических и других изменяющихся поправок и суммирования исправленных сейсмических сигналов, основанный на подаче в одну линию задержки сейсмических сигналов от одновременно обрабатываемых каналов, отличающийся тем, что, с целью иовыщения точности ввода поправок, каждый сигнал подают через соответствующую группу ключей к отводам линии
задержки, в которой происходит суммирование сигналов, а ключами управляют импульсы, поступающие из обрабатывающей машины, так, что в любой момент времени открыт лишь один ключ из группы, а остальные закрыты.
2.Способ по п. 1, отличающийся тем, что, с целью повышения скорости ввода поправок, изменяют величину задержки одновременно всех звеньев линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПАРАЛЛЕЛЬНОГО ВВОДА КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1970 |
|
SU283615A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ВОСПРОИЗВОДИМЫХ СЕЙСМОГРАММ | 1973 |
|
SU375603A1 |
| Устройство для автоматической обработки сейсморазведочных данных и построения глубинных сейсмических разрезов | 1976 |
|
SU614405A1 |
| Устройство автоматической обработки сейсморазведочных данных и построения сейсмических глубинных разрезов | 1976 |
|
SU735954A1 |
| §СеСОЮЗНАЛ J if'ATF!iTl50-T?XHWSC««| | 1973 |
|
SU388238A1 |
| СПОСОБ КОРРЕКЦИИ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ВОЛИ | 1973 |
|
SU399813A1 |
| СПОСОБ КОРРЕКЦИИ КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1972 |
|
SU332401A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ СЕЙСМИЧЕСКИХ РАЗРЕЗОВ | 1969 |
|
SU248987A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ КИНЕМАТИЧЕСКИХ ПОПРАВОК | 1966 |
|
SU216968A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМОГРАММ | 1970 |
|
SU287330A1 |
TL
ч 8
