Известны светопроекциоииые дальномеры с постоянным базисом и переменным параллактическим углом. В этих дальномерах изменение параллактического угла производится поворотом зеркал, а фокусирование - перемещением объективов.
В предлагаемом светонроекционном дальномере изменение параллактического угла осуществляется при поступательном перемещении пары зеркал в направлении оптических осей проекционной и приемной ветвей дальномера. При таком перемещении одновременно выполняется и фокусировка пазванпых ветвей дальномера. Для непрерывной дистанционной регистрации величины перемещения каретки исполнительный механизм, например ходовой винт двигателя, перемещающего каретку с подвижными зеркалами компенсатора, соедниен через редуктор с круговым поте {циометром, включенным в цепь регистрирукгщего прибора.
В описываемом приборе предусматривается как возможность дискретного определения расстояния, так и возможность непрерывного слежения за изменением расстояния при использовании фоточувствительного элемента, например фотоумножителя, помещенного в выходном зрачке приемной ветви дальномера, вместо визуального наблюдения. При этом для дискретного определения предлагается использовать для перемещения каретки реверсивный двигатель, включениый в релейную схему, срабатывание реле которой происходит по сигналу от фоточувствительного элемента и вызывает реверс двигателя. Для непрерывного слежепия перед фоточувствительным элементом установлен механический модулятор, а фоточувствительный элемент включен в электроизмерительную схему, выделяющую сигнал рассогласования, отрабатываемый двигателем, перемещающим каретку.
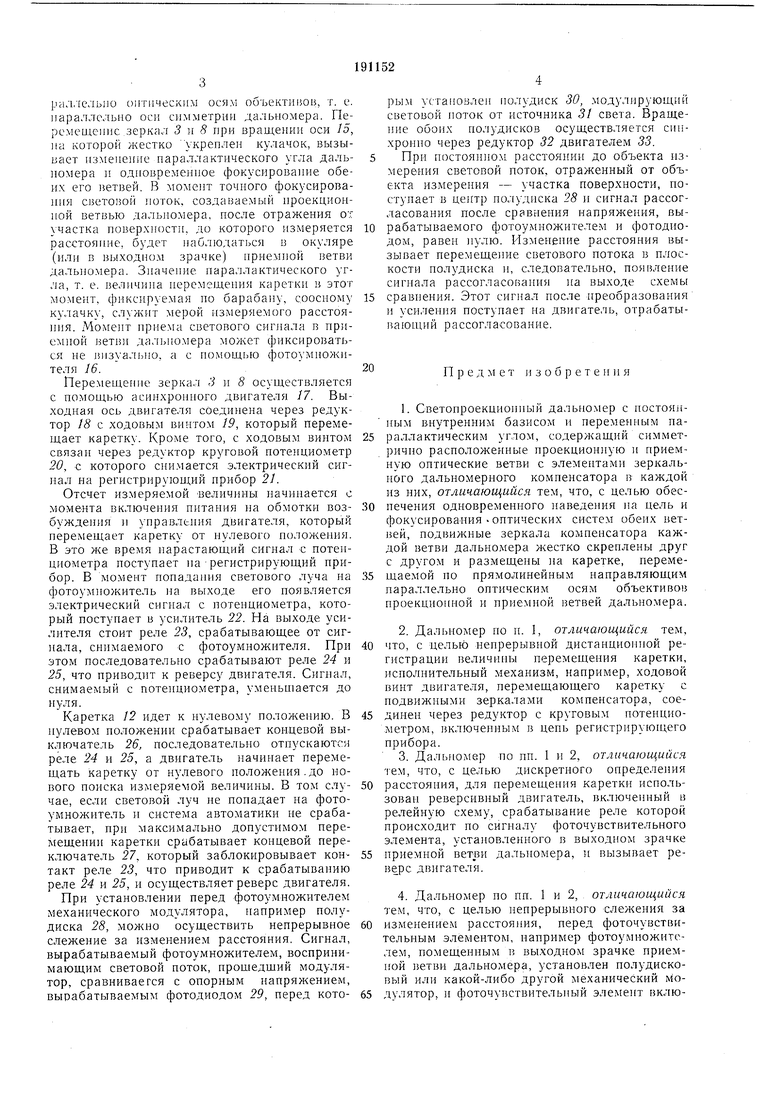
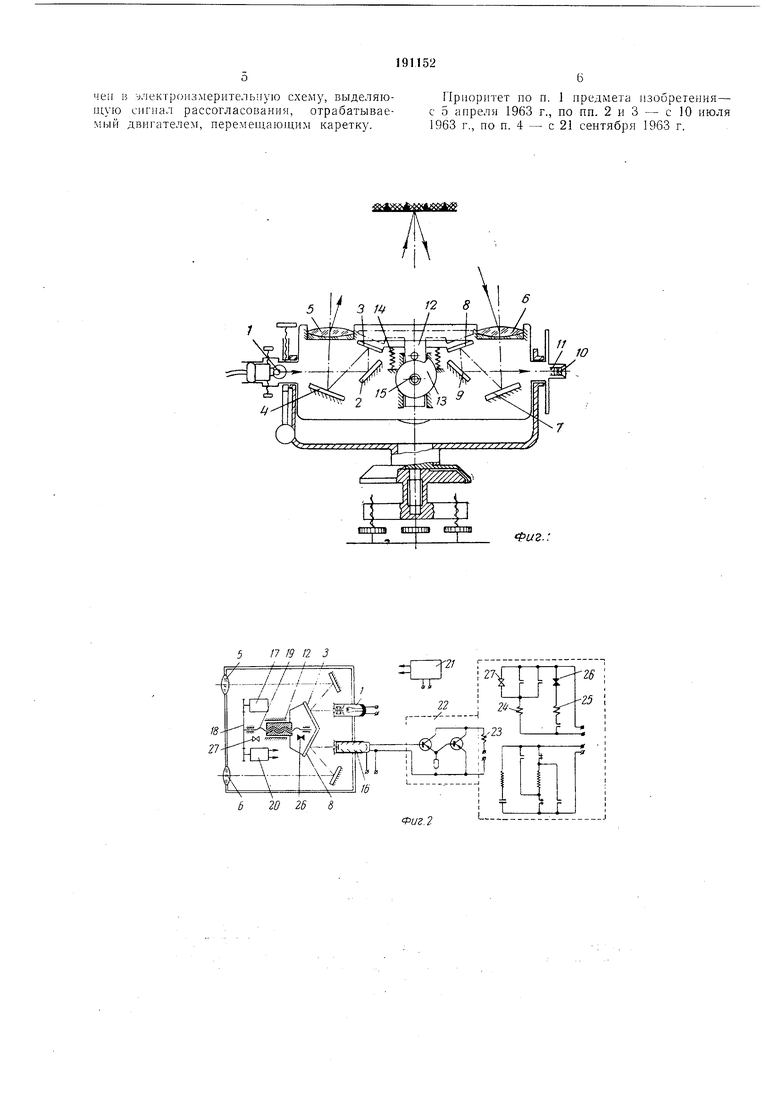
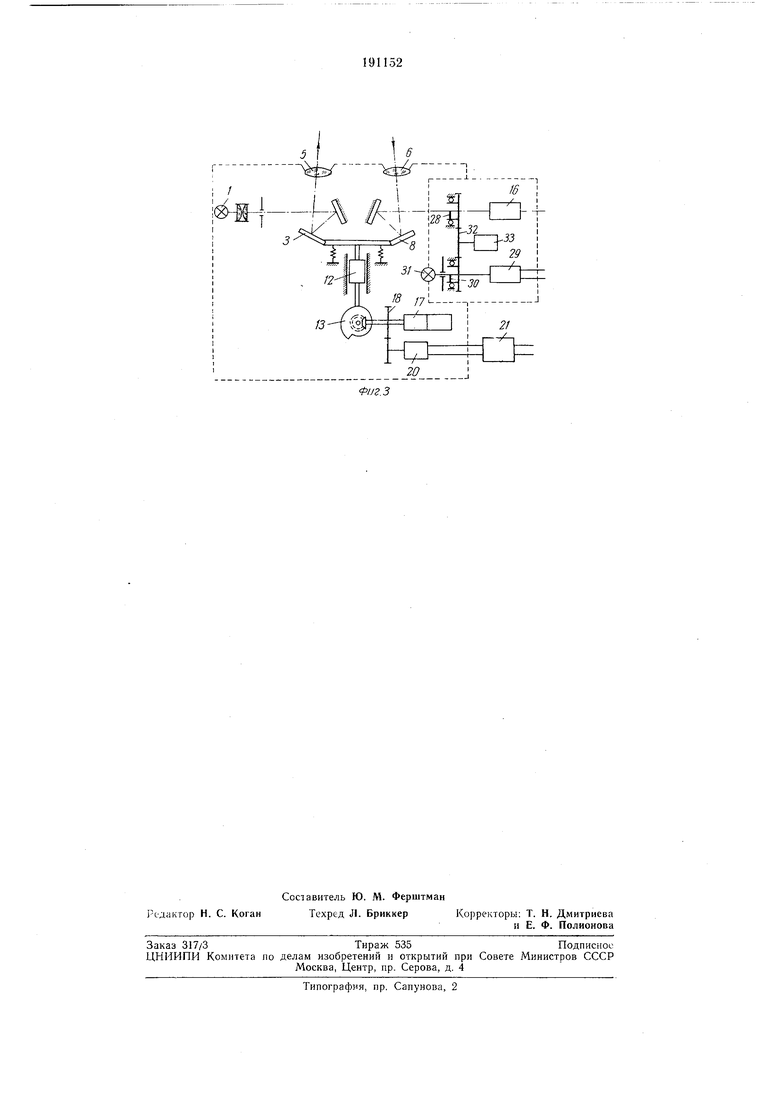
Па фиг. 1 представлена принципиальная схема предлагаемого дальномера; на фиг. 2- вариант построения дальномера для случая дискретного измерения расстояний; на фиг. 3 - вариант построения дальномера для rienpepbiBHoro слежения за изменением расстояния.
Дальномер содержит проекционную и приемную ветви. Световой луч от лампы / через систему зеркал 2, 3, 4 и объектив 5 проецируется на участок поверхности, расстояние до которого измеряется. Отраженный от поверхности поток через объектив 6 и систему зеркал 7, 8, 9 направляется в окуляр 10 приемной ветви дальномера, перед которым установлена диафрагма )/.
рал, оптическим осям ооъектн1юи, т. е. параллельно оси симметрии дальномера. Персмеиденис зеркал 3 и 8 при вращении оси 15, на которой жестко укреплен кулачок, вызывает изменение нараллактического угла дальномера и одновременное фокусирование обеих его етвей. В момент точного фокусирования сБето юй ноток, создаваем нроекциоиной ветвью дальномера, носле отражения от участка новерхпости, до которого измеряется расстояние, будет наблюдаться в окуляре (нли в выходном зрачке) ириемной ветви дальномера. Значение нараллактического угла, т. е. величина иеремещения каретки в этот момент, фнксируемая но барабану, соосному кулачку, служит мерой измеряемого расстояния. Момент нрнема светового сигнала в ириемной вет15и дальномера может фиксироваться не )изуал11но, а с немощью фотоумиожнтеля 16.
Перемеидеиие зеркал 3 и 8 осуществляется с помощью асинхронного двигателя 17. Выходная ось двигателя соединена через редуктор 18 с ходовым винтом 19, который перемещает каретку. Кроме того, с ходовым винтом связан через редуктор круговой потенциометр 20, с которого снимается электричеекий сигнал на регистрирующий прибор 21.
Отсчет измеряемой величины начинается с момента включения ннтания на обмотки возбуждения )1 унравлення двигателя, который неремещает каретку от нулевого ноложення. В это же время нарастающий сигнал с потенциометра поступает на регистрирующий прибор. В момент попадания светового луча на фотоу1 1ножитель на выходе его появляется электрический сигнал с потенциометра, который поступает в усилитель 22. На выходе усилителя стоит реле 23, срабатывающее от сигнала, снимаемого с фотоумножителя. При этом последовательно срабатывают реле 24 и 25, что приводит к реверсу двигателя. Сигпал, снимаемый с потенциометра, уменьшается до нуля.
Каретка 12 идет к нулевому положению. В нулевом положении срабатывает концевой выключатель 26, последовательно отпускаются реле 24 и 25, а двигатель начинает перемещать каретку от нулевого положения.до нового поиска измеряемой величины. В том случае, если световой луч не попадает на фотоумножитель н система автоматики не срабатывает, при максимально допустимом перемещении каретки срабатывает коицевой переключатель 27, который заблокировывает контакт реле 23, что приводит к срабатыванию реле 24 и 25, и осуществляет реверс двигателя. При установлении перед фотоумножителем механического модулятора, папример полудиска 28, можно осуществить непрерывное слел.ение за изменением расстояния. Сигнал, вырабатываемый фотоумножителем, воспринимающим световой поток, прошедщий модулятор, сравниваегся с опорным напряжением, вырабатываемым фотодиодом 29, перед кото)ым установлен нолудиск 30, .модулирующий световой ноток от источника 31 света. Вращение обоих иолудисков осуществляется синхронно через редуктор 32 двигателем 33. При постоянном расстоянии до объекта измерения световой поток, отраженный от объекта измерения - участка поверхности, поступает в центр нолуднска 28 и сигнал рассогласования после сравнения напряжения, вырабатываемого фотоумножителем и фотодиодом, равен нулю. Изменение расстояния вызывает перемещение светового потока в плоскости полудиска и, следовательно, появление сигиала рассогласования на выходе схемы
сравнения. Этот сигнал носле преобразования и уси.тения поступает на двигатель, отрабатывающий рассогласование.
Пред м е т изобретения
1. Светонроекциоиный дальномер с постоянным внутренним базисом и переменным нараллактическим углом, содержащий симметрично расположенные проекционную н приемную оптические ветви с элементами зеркального дальномерного комненсатора в каждой из них, отличающийся тем, что, с целью обеспечения одновременного наведения на цель и фокусирования оптических систем обеих ветвей, подвижные зеркала компенсатора каждой ветви дальномера жестко скреплены друг с другом и размещены на каретке, иеремещаемой по прямолинейным направляющим параллельно оптическим осям объективов проекционной и приемной ветвей дальномера.
2.Дальномер по н. 1, отличающийся тем, что, с целью непрерывной дистанционной регистрации еличнны перемещения каретки, исполнительный механизм, например, ходовой винт двигателя, перемещающего каретку с подвижными зеркалами компенсатора, соединен через редуктор е круговым потенциометром, включенным в цень регистрирующего прибора.
3.Дальномер ио нн. 1 и 2, отличающийся тем, что, с целью дискретного онределепия
расстояиия, для перемещения каретки иснользован реверсивный двигатель, включенный в релейную схему, срабатывание реле которой происходит по сигналу фоточувствительного элемента, установленного в выходном зрачке
нриемной вет1зи дальномера, и вызывает реверс двигателя.
4.Дальномер но нн. 1 и 2, отличающийся тем, что, с целью непрерывного слежения за
изменением расстояния, перед фоточувствительным элементом, например фотоумножителем, помещенным в выходном зрачке ириемьой lieTBH дальномера, установлен полудисковый или какой-либо другой механический мочен в улектроизмерительпую схему, выделяющую сигнал рассогласования, отрабатываемый двигателем, переме1цаю цим каретку.
Приоритет по п. 1 предмета изобретения- с 5 апреля 1963 г., по пп. 2 и 3 - с 10 июля 1963 г, по п. 4 - с 21 сентября 1963 т.
| название | год | авторы | номер документа |
|---|---|---|---|
| Светопроекционный дальномер | 1983 |
|
SU1200121A1 |
| Светопроекционный дальномер | 1983 |
|
SU1080013A1 |
| СВЕТОПРОЕКЦИОННЫЙ ФОТОДАЛЬНОМЕР | 1964 |
|
SU164964A1 |
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU199433A1 |
| Светопроекционный дальномер | 1983 |
|
SU1275207A1 |
| ЭЛЕКТРООПТИЧЕСКИЙ ДАЛЬНОМЕР | 1969 |
|
SU236033A1 |
| Устройство для контроля неплоскостности | 1981 |
|
SU1024709A1 |
| ФОТОЭЛЕКТРИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU395803A1 |
| БСЕООЮЗНАЯ I|Пг\ТЕиТ1Ш-1ЕХНЯЧЕ(,К^ БИБЛИОТЕ:НА I | 1971 |
|
SU296283A1 |
| ИНКЛИНОМЕТРИЧЕСКАЯ СТАНЦИЯ | 1973 |
|
SU368389A1 |
6 20 26 8
fU2.
Фиг.2
