1
Изобретение отнооится к системам автоматического контроля и регулирования и предназначено преимунлественйо для регистрации показаний приборов со световым указателем.
Известные фотоэлектрнчеокие следящие системы содержат датчик рассогласования со оветоч1увствительньш элементом, установленным на каретке, усилитель и двигатель, связанный с кареткой.
Однако пр.и потере световой связи светочувствительного элемента с И|Сточни,ком процесс согласования системы, т. е. процесс захвата луча, производится в известных устройствах вручную.
Целью изобретения является автоматизация процесса захвата луча.
Для этого в систему устаиовлены электронное реле с двумя замыкающими контактами и дополнительный светочувствительный элемент каретки, подключенный параллельно с замыкающим конта ктом магнитоуправляемого концевого выключателя начала хода каретки к пер:БОму входу электронного реле, ко второму входу которого .подключены параллельно соеДйненные замыкающий .контакт магнитоуправляемого концевого выключателя конца хода каретка и замыкающий контакт электронного реле, включенного своим вторым замыкающим KOHTaiKTOM в цепь, щунтирующую светочувствительный элемент мостового датчика рассогласования.
Изобретение пояснено- чертежами.
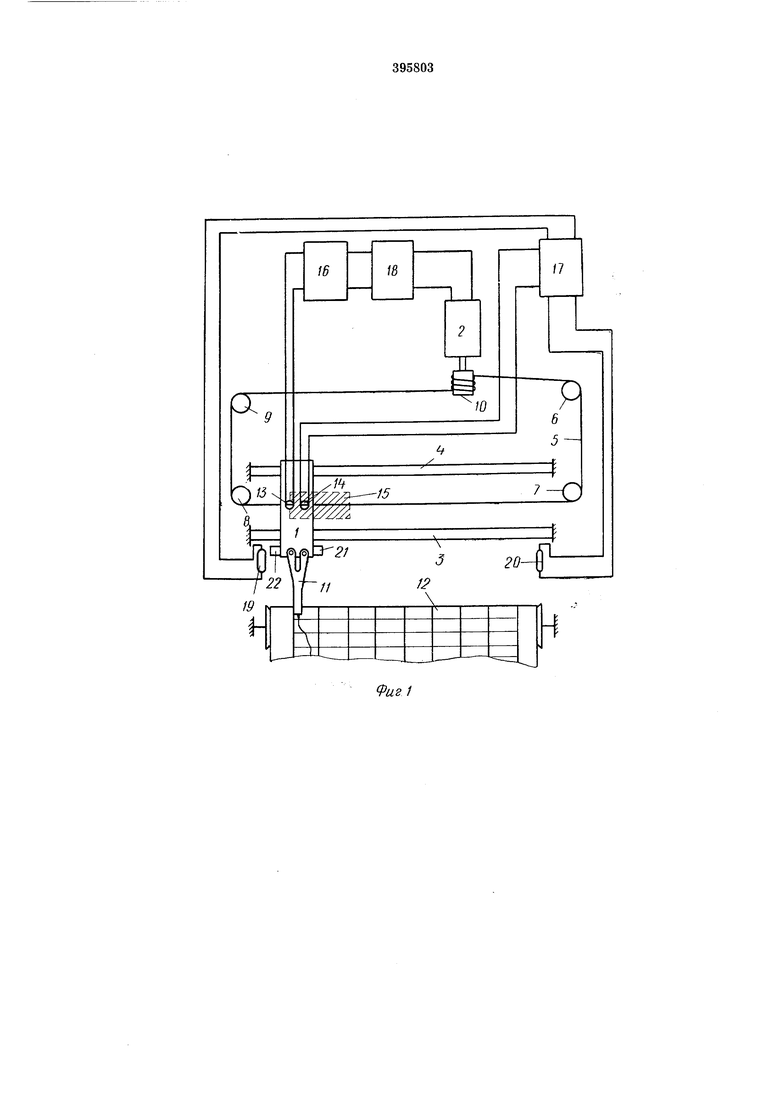
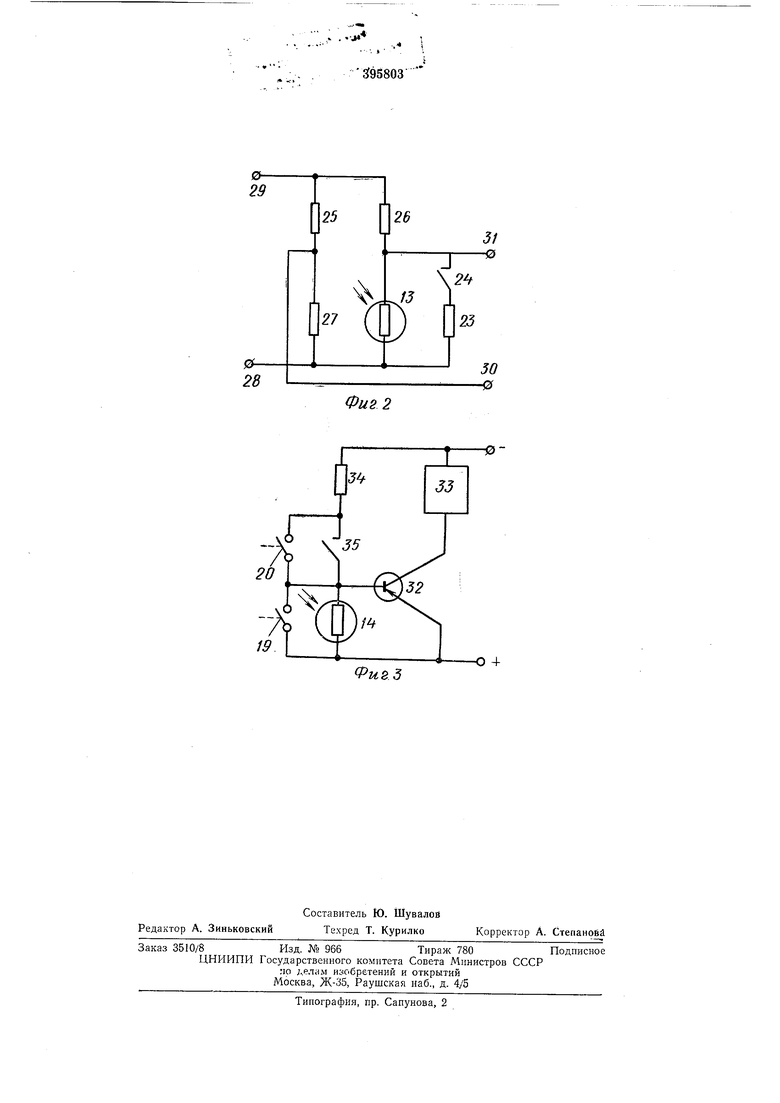
На фиг. 1 приведена функциональная схема системы; на фиг. 2 - электрическая схема: мостового датчика рассогласования; на фиг. 3 - электрическая схема электронного реле с цепями управления.
Фотоэлектрическая следящая система (фиг. 1) содержит каретку /, .перемещаемую двигателем 2 по на правляющн:М 3 н 4 дри помощи тросика 5, отклоняющих 6, 7, 8, 9 Ti илкива 10.
На каретке / установлены перо // для регистрации перемещения светового луча на диаграмме 12, светочувствительные элементы J3 и 14, на ПрИМер фоторезисторы, на (которые воздействует световой луч 15, причем оветочувствительный элемент 13 (фоторезистор) включен в схему мостового датчика рассогласования 16, а светочувствительный элемент 14 включен в цепь управления электронного реле 17. Сигнал рассогласова.ния с датчика рассогласования 16 поступает на вход усилителя 18, к выходу которого подключена обмотка двигателя 2. Вблизи от направляющей 3, у границ зоны неремещения каретки 1, установлены замыкающие контакты магнитоуправляемых концевых выключателей 19 начала н 20 конца хода каретки, срабатывающих иод воздействием постоянных магнитов 2-l и 22, рааположенных на каретке. Концезые выключатели 19 и 20 подключены к управляЕощим цепям электронного реле 17. Мостовой датчик рассогла1сова ния 16 (фиг. 1) содержит светочувствительный элемент 13 {фигг. 2), включенный в одно из плеч .мостовой схемы, рези1стор 23, подключенный лри помощи замыкающего контакта 24 электронного реле 17 (фиг. 1) параллельно светочувствительиому элементу 13, и три резистора 25, 26, 27, включенные в остальные плечи мостовой схемы. Входные концы 28 « 29 датчика рассогласования 16 подключены к автоно шому источнику питания, а выходные концы 30, 31 подключены ко входу усилителя 18 (фиг. 1). Электронное реле 17 (фиг. 1) содерлшт транзитор 32 (фиг. 3), в коллекторную цепь которого включено электромехапическое реле 33,цепь управления, состоящая из резистора 34,подключенного через за1мыкающий магнитоуправляемый концевой выключатель 20 между минусом питания и базой траизистора 32, оветочуествительного элемента 14, подклю Чвнного между плюсом питания и базой транзистора 32, магнитоуправляемого концевого выключателя 19, подключенного параллельно оветочувствительному элементу 14, и замыкающего контакта 35 электромеханического реле 33, подключенного параллельно замыкающему концевому выключателю 20. Фотоэлектрическая следящая система работает следующим образом. В исходном положении все контакты раЗомкнуты. Мостовая схема датчика рассогласования 16 настроена таким образом, что равновесие наступает при освещении перемещающимся световым лучОМ 15 половины фоточувствительного слоя оветочув1ствительного элемента 13. При смещении луча от середины светочувствительного слоя светочувствительного элемента 13 на выходе схемы датчика рассогласования 16 появится сигнал рассогласования, дискриминированный по полярности для системы постоянного тока или по фазе для системы переменного тока. Под воздействием сигнала рассогласования, фор1мируемого схемой мостового датчика раосогласования 16 при затемнении светочувствительного слоя светочувствительного элемента 13, каретка / переместится в направлении от начального положения к конечному до встречи со световым лучом 15. Если при своем перемещении каретка / встретит световой луч 15, то осветится половина светочувствительного слоя оветочувствительного элемента 13 и наступит равновесие. Если Каретка / при эвоем перемещении не встретит светового луча (из-за на|рущениой оптической связи), то она, дойдя до конечного положения, замкнет замыкающий магнитоуправляемый концевой выключатель 20. При этом отопрется транзистор 32, который включит электромеха«ическое реле 33. Реле 33 одним за,мы1кающим контактом 35 заблокирует концевой выключатель 20, а другим подключит параллельно светочувствительному элементу 13 резистор 23 (. фиг. 2), ИМитируя таким образом полное освещение элемента 13. При этом датчик рассогласования 16 сформирует управляющий сигнал для перемещения каретки в направлении начального положения. Как только каретка / начнет перемещаться к начальному положению, замыкающий концевой выключатель 20 разомкнется. Однако через электромеханическое реле 33 понпрежнему будет протекать ток, так как замыкающий концевой выключатель 20 зашунт1Ирован контактом 35 реле 33. Если при перемещении каретки / к начальному положению произойдет встреча с лучом 15, то будет освещен элементом 14 и запрет транзистор 32, отчего электромеханическое реле 33 отключится, 1цри этом разОМ1Кнется контакт 35 реле 33 и контакт 24, который отключит резистор 23, щуитирующий элемент 13 и, такИ|М образом, наступит режим нормального слежения. В том случае, если три перемещении к начальному положению каретка не встретит светового луча 15, то, дойдя до начального положе-ния, она магнитом 22 зам.кнет магнитоуправляемый концевой выключатель 19, который запрет транзистор 32, при этом электромеханическое реле 33 отключится, разомкнутся контакты 24 и 35 электромеханического реле 33, при этом также отключится резистор 23, щунтирующий 13 и каретка 1 снова переместится от начального положения к конечному. Предмет изобретения Фотоэлектрическая следящая система, содержащая два (магнитоуправляемых концевых выключателя начала и конца хода каретки, на которой установлен светочувствительный элемент мостового датчика рассогласования, подключенного через усилитель к двигателю, связанному с кареткой, отличающаяся тем, что, 1C целью автоматизации процесса захвата луча, в ней установлены электронное реле с двумя замыкающими контакта ми и дополнительный светочувствительный элемент каретки, подключенный параллельно с замыкающим KOHTaiKTOM .магнитоуправляемого концевого (выклЮЧателя начала хода каретки к перBOMiy входу электронного реле, ко второму входу которого подключены параллельно соединенные замьикающнй контакт малнитоупрашлябмого концевого выключателя конца хода каретки и замыкающий конта1кт электронного реле, включенного своим вторым замыкающим контактом в цепь, щунтирующую светочувствительный элемент мостового датчика рассогласования.
7/
W
f
J2
..
-. .
3195803 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фотоследящего копирования границы контрастного изображения | 1976 |
|
SU603980A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО | 1972 |
|
SU326555A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТУРНИКЕТОМ | 1970 |
|
SU264832A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ПО ЗАДАННОЙ ПРОГРАММЕ | 1971 |
|
SU313321A1 |
| АНАЛИЗАТОР КООРДИНАЦИИ ДЕЙСТВИЙ | 1970 |
|
SU280066A1 |
| УСТРОЙСТВО для ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ МАКСИМУМА СИГНАЛА | 1970 |
|
SU269252A1 |
| ЭЛЕКТРОПРИВОД ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1971 |
|
SU298033A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ЛАМПОМЕНЯТЕЛЯ | 1972 |
|
SU341020A1 |
| УСТРОЙСТВО для КОНТРОЛЯ СТЕРЖНЕЙ, ПОКРЫТЫХ ФЕРРОМАГНИТНОЙ ПЛЕНКОЙ | 1973 |
|
SU385320A1 |
| Выключатель | 1973 |
|
SU471670A1 |
-лЧО 4(РивЗ
