Предлагается устройство для управления пуском и торможением электроподвижного состава, содержащее на каждой единице двигате;1и постоянного тока последовательного возбуждения для привода групповых контроллеров, подключенные к псточнику ностояииого напряжения через коммутационный элемент на тнрнсторах.
Известные устройства такого рода сложны н требуют комнлекса различного оборудования как для управления пуском и тор.можением, так и для решення побочных задач сннхроиизации отдельиых коитроллеров н зандиты от боксования.
В предложенном устройстве для унравле11ия тиристорами коммутацио1нюго элемента использован магнитный элемент с прямоугольной петлей г 1стерезнса, содержащий выходную обмотку, нодключенную через диоды к управляющпм электродам тиристоров, задаюн ую обмотку, подключенную к )егул11руе мому нсточнпку постоянного напряжения, а также токовую обмотку и обмотку контроля боксования, намотанные встречно с задающеГ;, н обмотки грузового азторежима и синхронизации групповых контроллеров, намотанные согласно с задающей обмоткой. Обмотка синхронизации, связанная с поездным проводом, может быть включспа через разделительные диоды на напряжепне двнгателя.
В устройстве могут быть применены два iiarHHTHbix элемента, из которых одни имеет донолннтельио обмотку, пптаемую переменной составляюплей папрялсемия, ннтающего двигатель, причем выходные обмотки этих элементов нодчлючсны к управляющнм электродам тиристоров последовате.чьно, и общая их точка соединена с общ11М мииусом тиристоров.
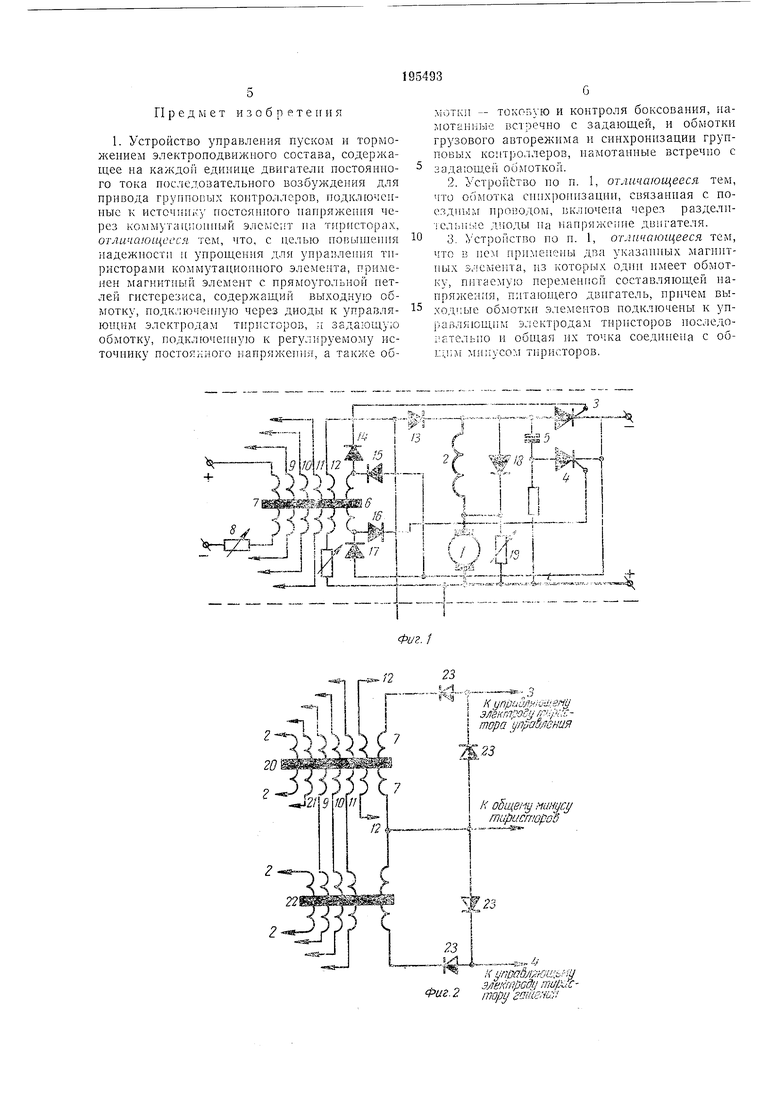
Па фиг. 1 изображена приициниа-.чьная схе0ма оннсываемого устройства; на фнг. 2 - варнаит его вынолнення с двулш магиитиымн элементами.
Двигатель / с обмоткой 2 последовательного возбуждеп -1Я ннтается от источника посто5янного напряженпя через вык иочатель па тиристорах 3 п 4 с 1 ол1мутнру1още1 1 емкостью 5. Управление тиристорами осупгествляется с номоиЦ),) : iari:HTHoro элемента с выходной обMOTKOji 6. Этот элемент ;5ыполнеп )3 матерпа0ла с нрялюугольной нетлей гистерезнеа. Задаю1дая облютка 7 олелюнта подключена к HCTOMiiHKy ностоянного нанряжеппя, иапрпмер а1а ум}ляторнои батарее, через регулировочг ое сопротивление S. Обмотка 9 грузового ав5торежима вк.лючена к цепь датчика грузового авторежи.ма таким образо.м, что при увеличе1-и загрузк вагона велнчииа тока, протекающего но neii, увеличивается. Обмотка грузового а;порежнма намотана согласно с задаюОб.мотка 10 боксовання вк;ночеыа на напряжение датчика боксования и нгамотана встречно с задающей обмоткой. Токовая обмотка 11 включена в цепь тяговых двигателей подвижного состава, по ней протекает ток, равный или пропорщюпальпнй силовому току. Она намотана встречно с задающей обмоткой. Обмотка 12 синхропизации включена через регулировочные сопротивления и разделительный диод 13 параллельио двигателям привода коитроллеров по поездному проводу. Обмотка сипхроиизации намотана согласпо с задающей обмоткой. Диоды 14, 15, 16 и 17 подключе15ы к выходной обмотке и служат для определения правильной полярностп импульсов уиравлеикя тиристорами 3 и 4. Диод 18 включен параллельио обмотке возбуждения и служит для поддерл-сания тока в обмотке после снятия напряжения i: для защиты тиристоров в этом режиме. Регулировочное сонротивлеиие 19 включено параллельно якорю и служит для создания тормозного контура и для регулирования скорости вращения двигателя.
На первой позиции, как и во всех схемах, после включения линейного контактора контроллер вращается хронометрически до достижения заданного пускового тока. По достижении тока уставки ток тяговых двигателей возрастает и превышает его. При разгоне поезда происходит умеиьшеиие силового тока в соответствии с характеристиками тяговых двигателей, и в момент превышения ампер-витков управлеиия пад токовыми происходит перемагничиванне элемента. В результате на его выходной обмотке появляется напряжение, которое подается па управляющий электрод тиристора 5 уиравления. Тиристор открывается, к двигателю / прикладывается напряжение, н групповой контроллер начинает вращаться.
При переходе группового контроллера на следующую позицию силовой ток резко возрастает, опять происходит перемагничивание элемента, и иа его выходной обмотке появляется ианрял ение, иоступающее на управляющ,нй электрод тнристора 4 гашения. При этом после разряда коиденсатора тиристор 5 запирается, а с двигателя снимается папряжение.
Так как обмотка возбуждеипя двигателя шунтирована диодом 18, а якорь - сопротивлением 19, двигатель переходит п режим электрического торможения н останавливается. В результате разгона силовой ток начинает уменьшаться, н весь цикл повторяется.
Величина амиер-витков задающей обмотки оиределяет усгавку даипого устройства, а ширина петли гистерезиса - его коэффициепт возврата. Величина сигнала управлеиня определяется скоростью неремагничпвання элемеита и количеством витков выход ой обмотки. В случае возникновения боксоваиия па какойлибо тяговой единице от измерительного элемента боксовапия на обмотку 10 поступает сигиал. Так как обмотка 10 намотана встречно с задающей их, ампер-витки вычитаются, и уставка устройства снижается. При за.данпой степеии боксованпя уставка понижается до величины, при которой церемагиичивание элемента становится практически невозможным, что в коиечном итоге приводит к остановке контроллера до прекращения боксования. С повышением загрузки выгона с помощью обмотки 9 увеличивается уставка устройства. В случае необходимости в устройство могут быть введеиы дополнительные обмоткн, контролнрующне требуемые параметры пуска или торможения.
При очень малых скоростях изменения параметров пуска или торможепия скорость неремагппчивания мала, поэтому для нолучспня сигнала управления необходимой величины приходится значительно увеличивать габариты магиитного элемента. Вместо этого могут быть применены два магнитных элемента (см. фиг. 2). При этом элемент 20 контролирует нижнюю границу параметров, то есть спадение силового тока, н в него введена дополнительиая обмотка 21 подмагиичивания переменной составляющей. Элемент 22 контролирует верхнюю границу параметров и в
дополнительной обмотке не нуждается. Перемагничивание элемента 20 в случае медленного спадания тока определяется разностью его задающих, управляющих и токовых ампервитков. В результате второго-третьего перемагничивания величина сигналов становится достаточной для управления тиристорами. Сигналы управления обратной полярностью ири этом роли не играют. В иоказапиом на чертел е варианте скорость перемагничивания
определяется обмоткой 21 так, что уже прн частотах пульсаций промышлепной частоты эта скорость оказывается достаточно высокой. Прн использовании устройства для электроподвижного состава однофазио-ностоянного тока
обмотка 21 не требуется.
Стабнлитропы 23 обеспечивают стабильную величину сигнала управления тиристорами.
Паличие магнитных элементов на нодвижном составе однофазио-ностоянного тока является необходимым, так как пульсации силового контролируемого тока могут быть больше ширины петли гистерезиса, что приводит к потере релейной характеристики и неустойчивой работе устройства. В случае применения устройства на подвижном составе, работающем по системе многих единиц, оно обеспечивает синхронный ход контроллеров. Обмотка снпхронизацни рассчитана таким образом, что создаваемые ею ампер-витки равны максимально возможным теоретически виткам силового тока, образуемым в результате разности характеристик тяговых двигателей, в частиости, диаметров колес отдельных тяговых едишщ. В случае возникновения боксования на
одной нз тяговых единиц контроллер выпадает из синхронизма, н пуск иа этой единице осуществляется под ко1ггролсм только своего устройства. Когда процесс боксовання закончился, контроллер догоняет остальные н про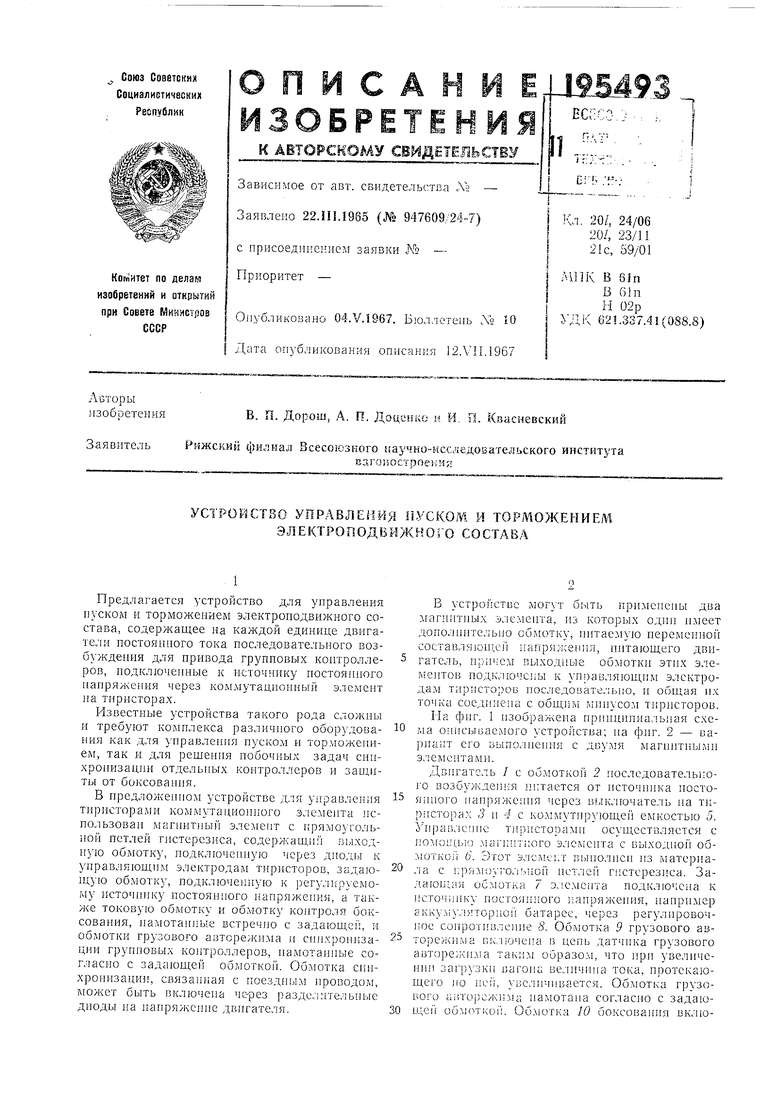
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для БЕСКОНТАКТНОГО УПРАВЛЕНИЯ РЕОСТАТНЫМ КОНТРОЛЛЕРОМ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1966 |
|
SU184291A1 |
| Устройство для токовой защиты электровоза | 1975 |
|
SU613436A1 |
| Устройство для защиты от боксования колесных пар транспортного средства | 1987 |
|
SU1495157A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРООБОРУДОВАНИЯ ВАГОНА МЕТРОПОЛИТЕНА | 1990 |
|
RU2022823C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2317217C1 |
| Преобразователь постоянного тока в постоянный | 1975 |
|
SU572881A1 |
| Система возбуждения для электрической машины | 1979 |
|
SU978309A2 |
| УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ СИЛОВЫХ КОНТРОЛЛЕРОВ ЭЛЕКТРОПОЕЗДА | 1966 |
|
SU187828A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2262456C1 |
| УСТРОЙСТВО ДЛЯ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1968 |
|
SU218953A1 |