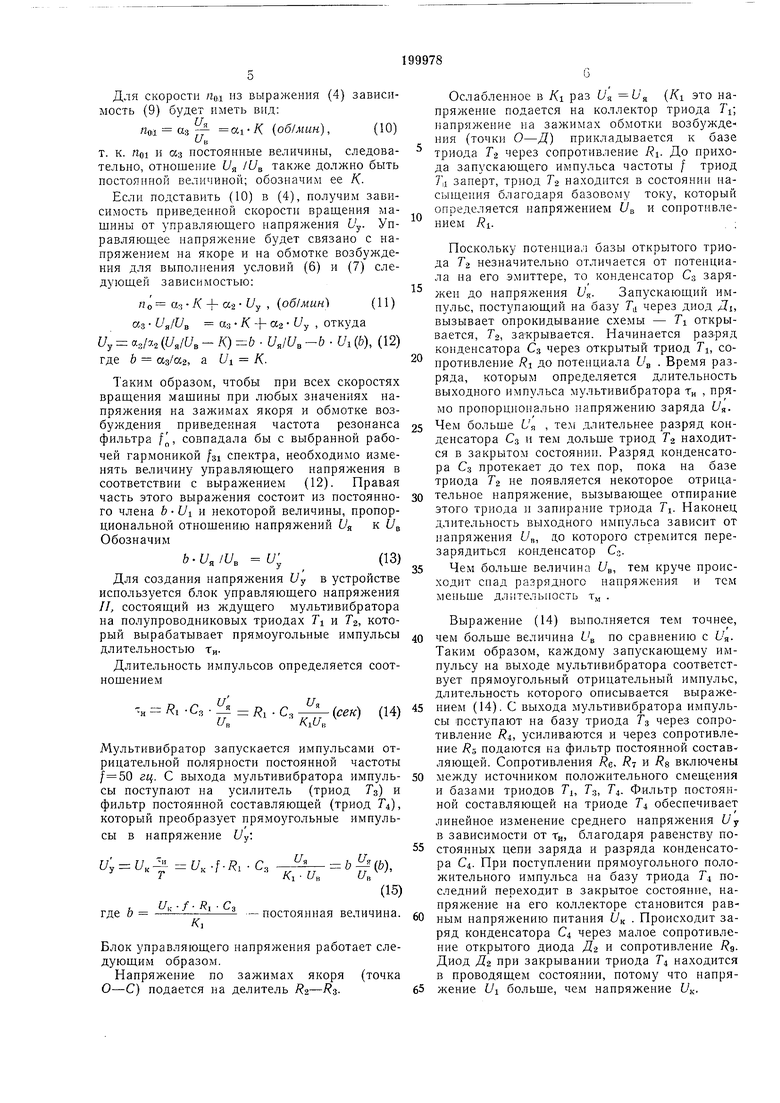
Известные устройства для измерения скорости вращения машин постоянного тока путем выделения наибольшей гармоники спектра пульсаций э. д. с. на катушке обмотки возбуждения, содержащие полосовой резонансный фильтр с регулируемой частотой резонанса, изменяемой с помощью обмоток управления, расположенных на сердечниках катушек индуктивности фильтра, блок формирования управляющего напряжения, пропорционального скорости вращения машины, и частотомер, не обеспечивают расширения диапазона измеряемых скоростей. Для расширения диапазона измеряемых скоростей предлагается обмотки управления фильтра включить на выход блока формирования управляющего напряжения, состоящего из ждущего мультивибратора, усилителя и фильтра постоянной составляющей и подключенного к якорю и обмотке возбуждения контролируемой машины. Устройство (фиг. 1) содержит однозвенный полосовой резонансный фильтр /, например типа К, резонансная частота которого автомагически изменяется так, что во всем диапазоне изменения скорости вращения машины в полосе пропускания фильтра находится только выбранная рабочая гармоника спектра, например /:л. Как известно, резонансная частота /о полосового фильтра типа К зависит от параметров элементов, входящих в него: (гц) (1) /о - о , 2я,/17Тс, Если изменить одновременно величины, например, всех индуктивностей фильтра в п раз, то резонансная частота изменится раз. Индуктивности фильтра LI и L выполнены на ферритовых тороидальных сердечниках, магнитная проницаемость которых зависит от намагничивающей силы постоянного подмагничивания. Увеличение намагничивающей силы постоянного подмагничивания вызывает уменьшение магнитной проницаемости материала сердечников, а следовательно, уменьшение индуктивцостей фильтра, так как между индуктивностью и магнитной проницаемостью существует линейная зависимость. Для создания намагничивающей силы постоянного подмагничивания индуктивности фильтра LI и La, кроме основной рабочей обмотки с .числом витков Wi и Wo, имеются обмотки управления с числом витков Wy. Обмотки управления включены последовательно на источник управляющего напряжения Uy . Поскольку индуктивности LI и L-2 выполнены
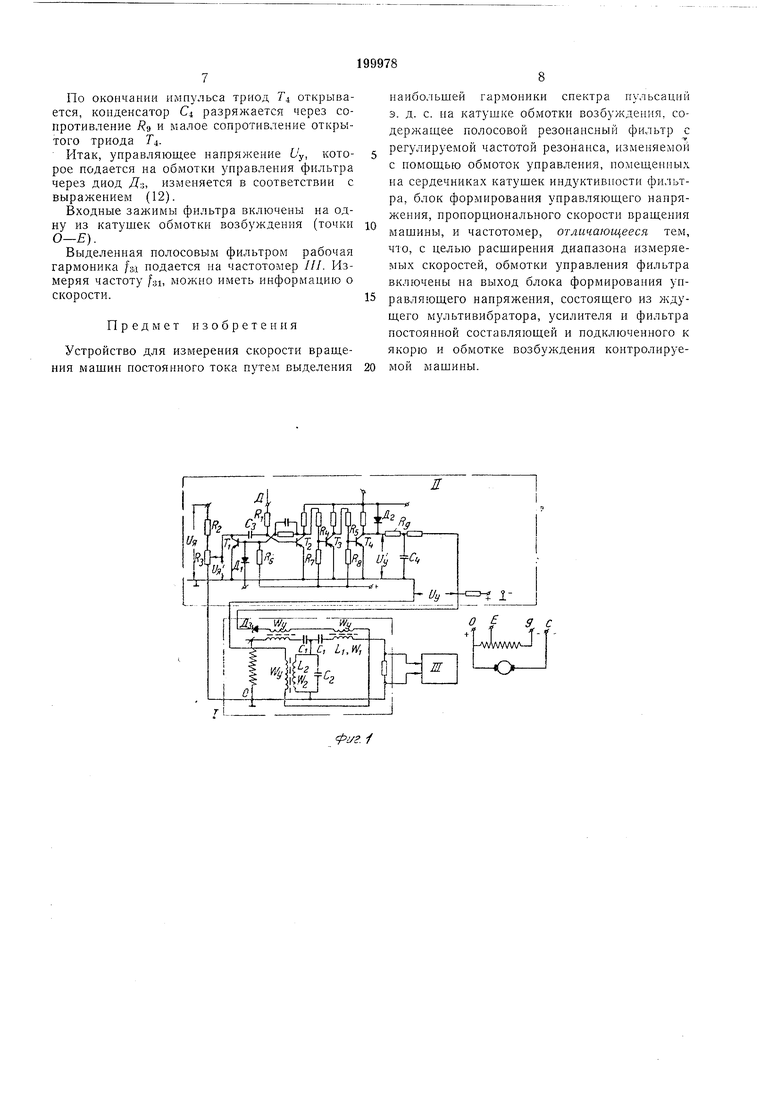
иа сердечниках, имеющих одинаковые геометрические размеры и равное число витков, то изменение управляющего напряжения Ly , а следовательно, и тока управления Zy : Uy/Rgy, (где -общее омическое сопротивление цепи управления) в несколько раз вызывает соответствующее изменение индуктивностей н всей резонансной частоты полосового фильтра. На фиг. 2 представлена зависимость частоты резонанса /о от тока в обмотках управления iy (кривая а). Для подобного фильтра fo F(Ly). Кривые Ь 1-1 с представляют соответственно изменение нижних и верхних граничных частот среза. Защтрихованная область между кривыми бис представляет полосу пропускания фильтра в зависимости от тока в обмотках управления. Кривую а с определенной степенью точности можно апроксимировать прямой линией, например А-Б, которая представляет зависимость приведенной частоты резонанса фильтра от тока управления
/;(-у)- :(1)
Уравнение этой прямой имеет вид:
+ ao-iy fM + ai-t/y (гц), (2) где ai .
Как указывалось выше, между частотой пульсаций fiji и скоростью машины п существует линейная зависимость:
bi --(24),.(3)
где Z - число зубцов якоря;
п - скорость враще1И я машины. Учитывая выражение (3), представим уравнение (2), в виде зависимости приведенной скорости п вращения машины от управляющего напряжения Ly :
«о «01 + 0-2 Uy (об/мин),(4)
60 я,
где «01 - приведенная скорость, соответствующая частоте резонанса /oi фильтра при iy 0.
Если в уравнении электромеханической характеристики машины пренебречь падение: напряжения на якоре „ г„ и реакцией якоря, которые должны влиять на изменение скорости машины не больше чем на 8о/о, а основной поток Ф считать постоянным, то между скоростью машины п и напряжепием t/a на зажимах якоря будет линейная зависимость:
п. - ; -- а . и„ (об/мин) (5) Ке ФК -ф
где а коэффициент пропорциональности.
Обмотки управления фильтра включены на блок управляющего напряжения, в качестве которого используется напряжение на якоре той же машины, скорость которой измеряется.
Фильтр рассчитывается так, что приведепная частота резонанса /о при всех значениях
тока управления iy совпадает с выбранной
рабочей гармоникой спектра пульсаций /gi на
катушке обмотки возбуждения, т. е.
fo f.3i.(6)
При этом действительная скорость вращения машины п должна быть равна приведенной По;
(7)
п «о ,
а управляющее напряжение оудет связано с напряжением на якоре машины следующей зависимостью:
(iLI По.1 + az- Ну а /7i а2 t/y , откуда
Uy (U,-U,) , (b),
(8)
где U.i - постоянное напряжение, которое вычитается из напряжения па якоре для осуществления соотношений (6) и (7).
Таким образом, при использовании напряжения (/я на якоре машины в качестве управляющего необходимо постоянство коэффициента а, т. е. постоянство потока.
Предлагаемое устройство дает возможность
измерять скорость вращения машины постоянного тока по частоте пульсаций на катушке обмотки возбуждения (десять и больше) при любых значениях иапряжения на якоре и при любых величинах основного потока мащины.
Резонансная частота его регулируется благодаря созданию в индуктивностях LI и La намагничивающей силы постоянного подмагничивания с помощью обмоток управления Wy , включенных последовательно на выход блока
управляющего иапряжения Ly.
Зависимость приведенной частоты резонанса от тока управления фильтра представлена на фиг. 2, прямая а . Зависимость приведеиной скорости вращения машины «о от управляющего напряжения описывается уравнением (4). Уравнение электромеханической характеристики машины для непостоянного потока, если пренебречь падением напряжения
на якоре /я /я и реакцией якоря, имеет вид:
. я - 4 я
и.
f/я
К,-Ф
К,-Ф ,-и
и„
(9)
(об/мин),
Off
в
где: Ф UI-LB ; 03 ,.
Коэффициент «3 можно считать постоянным, если принять поток машины Ф с определенной
степенью точности на некотором рабочем участке, пропорциональным напряжению на обмотке возбуждения UB . Из выражения (9) скорость вращения машины пропорциональна отнощению напряжения на якоре к напряДля скорости % из выражения (4) зависимость (9) будет иметь вид: Ло,1 сз- 0.1-К. (об/мин),(10) Т. К. «01 И осз постоянные величины, следовательно, отношение Uy /Ug также должно быть постоянной величиной; обозначим ее /С. Если подставить (10) в (4), получим зависимость приведенной скорости вращения машины от управляюш,его напряжения Ly. Управляюшее напряжение будет связано с напряжепием на якоре и на обмотке возбуждения для выполнения условий (6) и (7) следующей зависимостью: о Оз К -{- а.-2- Uy , (об/мин}{11) «3 UJL/B оз К ,2- Uy , откуда Uy а.,/у., (UJU, -К)Ь- UJU, Ь L (6), (12) где b аз/ссг, а Ui К. Таким образом, чтобы при всех скоростях вращения машины при любых значениях напряжения на зажимах якоря и обмотке возбуждения приведенная частота резонанса фильтра /д, совпадала бы с выбранной рабочей гармоникой /31 спектра, необходимо изменять величину управляющего напряжения в соответствии с выражением (12). Правая часть этого выражения состоит из постоянного члена b Ui и некоторой величины, пропорциональной отношению напряжений Оя к U Обозначим ь-и,/и„ и:. Для создания напряжения Uy в устройстве используется блок управляющего напряжения П, состоящий из ждущего мультивибратора на полупроводниковых триодах Т и Т, который вырабатывает прямоугольные импульсы длительностью ТиДлительность импульсов определяется соотнощением/.-С., - 1 Сз (сек) (14) и, к,и. Мультивибратор запускается импульсами отрицательной полярности постоянной частоты гц. С выхода мультивибратора импульсы поступают на усилитель (триод Гз) и фильтр постоянной составляющей (триод 4), который преобразует прямоугольные импульсы в напряжение Ly: b(b), U, U.U,-IR,.C, ---- AI (в ,i/i; //, Cg где b - постоянная величина. Блок управляющего напряжения работает следующим образом. Ослабленное в /d раз U, я (К это напряжение подается на коллектор триода 7i-, напряжение на зажимах обмотки возбуждения (точки О-Д) прикладывается к базе триода Т-2 через сопротивление Ri. До прихода запускающего импульса частоты / триод 7i заперт, триод Га находится в состоянии насыщения благодаря базовому току, который определяется напряжением V и сопротивлением 1.; Поскольку потенциал базы открытого триода TZ незначительно отличается от потенциала на его эмиттере, то конденсатор Сз заряжеи до напряжения И. Запускающий импульс, поступающий на базу Гц через диод Дь вызывает опрокидывание схемы - TI открывается. Га, закрывается. Начинается разряд конденсатора Сз через открытый триод TI, сопротивление Ri до потенциала U . Время разряда, которым определяется длительность выходного импульса мультивибратора Ти , прямо пропорционально напряжению заряда (7. Чем больще Ся , тем длительнее разряд конденсатора Сз и тем дольще триод То находится в закрытом состоянии. Разряд конденсатора Сз протекает до тех пор, пока на базе триода Га не появляется некоторое отрицательное напряжение, вызывающее отпирание этого триода и запирание триода Tj. Наконец длительность выходного импульса зависит от напряжения и„, до которого стремится перезарядиться конденсатор С. Чем больще величина U, тем круче происходит спад разрядного напряжения и тем меньше длительность т„ . Выражение (14) выполняется тем точнее, чем больше величина Lg по сравнению с LaТаким образом, каждому запускающему импульсу на выходе мультивибратора соответствует прямоугольный отрицательный импульс, длительность которого описывается выражением (14). С выхода мультивибратора импульсы поступают на базу триода Гз через сопротивление R, усиливаются и через сопротивление 5 подаются на фильтр постоянной составляющей. Сопротивления Re. Ri и Rg включены между источником положительного смещения и базами триодов Tj, Т, Т. Фильтр постоянной составляющей на триоде Т обеспечивает линейное изменение среднего напряжения Uy в зависимости от Ти, благодаря равенству постоянных цепи заряда и разряда конденсатора С4. При поступлении прямоугольного положительного импульса на базу триода 4 последний переходит в закрытое состояние, напряжение на его коллекторе становится рав-i ным напряжению питания UK . Происходит заряд конденсатора С4 через малое сопротивление открытого диода Да и сопротивление Rg. Диод Да при закрывании триода Т находится в проводящем состоянии, потому что напряПо окончании имнульса триод Т открывается, конденсатор d разряжается через сопротивление и малое сопротивление открытого триода .
Р1так, управляющее напряжение Ly, которое подается на обмотки управления фильтра через диод Ду, изменяется в соответствии с выражением (12).
Входные зажимы фильтра включены на одну из катушек обмотки возбуждения (точки О-Е).
Выделенная полосовым фильтром рабочая гармоника fai подается на частотомер ///. Измеряя частоту fsi, можно иметь информацию о скорости.
Предмет изобретения
Устройство для измерения скорости вращения машин постоянного тока путем выделения
наибольшей гармоники спектра пульсаций 3. д. с. на катушке обмотки возбуждения, содержащее полосовой резонансный фильтр с регулируемой частотой резонанса, изменяемой с помощью обмоток управления, помещенных на сердечниках катушек индуктивности фильтра, блок формирования управляющего напряжения, пропорционального скорости вращения машины, и частотомер, отличающееся тем, что, с целью расширения диапазона измеряемых скоростей, обмотки управления фильтра включены на выход блока формирования унравляющего напряжения, состоящего из ждущего мультивибратора, усилителя и фильтра постоянной составляющей и подключенного к якорю и обмотке возбуждения контролируемой машины.

-t I / ff С
-лмллмлл-I
5 W 20 30 50 во 7О ty Фцг2
