Известны устройства для автоматического управления гидроперегружателем, содержащие датчики Вакуума, датчики заиления, развязывающие усилители, грунтовой и размывочный насосы с приводами и две регулируемые задвижки на размывочных трубопровода.к с приводами.
Предлагаемое устройство позволяет П0|высить надежность работы агрегата при непрерьрвном поддержании наивысщей производительносги его по твердому материалу. Отличается оио тем, что в нем дополнительно установлены датчики ВОДЫ в барже, датчики положения задвижек и логическое устройство с входными преобразователями «непрерывный/дискретный по числу всех датчиков гидроперегружателя, подключенных к логическому устройству. Выходы последнего подключены через Соответствующие развязывающие усилители к приводам грунтового насоса, размьшочного иасоса и задвижек.
Устойчивость работы в переходных режимах обеспечивают установленные в логическом устройстве ключи, превращающие выходные сигналы в импульсы регулируемой длительности и интенсивности.
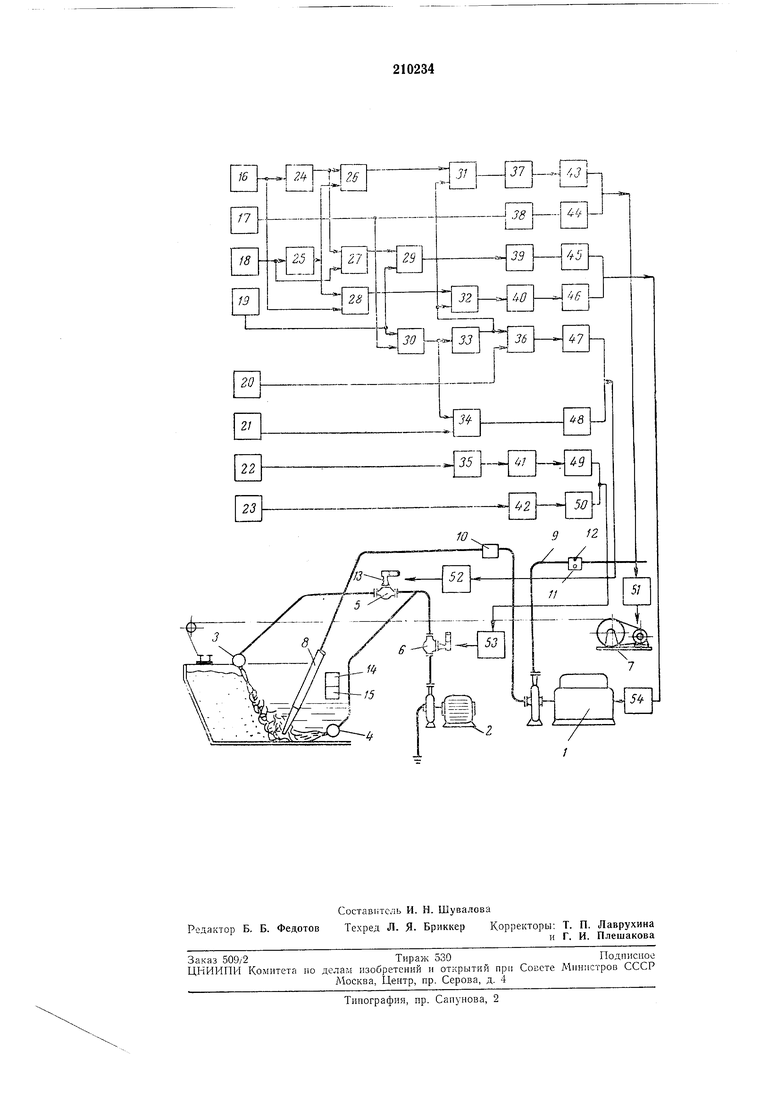
тор 3, нижний коллектор 4, задвижки 5 и 6, лебедку 7 для протяжки баржи при выгрузке, всасьшающий трубопровод 8, напорный трубопровод 9, датчик вакуума W, датчик рабочего
заиления //, датчик аварийного заиления 12, датчики 13 положения задвижки 5, регистрирующие степень ее открытия, датчики 14 и /J нижнего и верхнего уровня воды в барже, преобразователи 16-23 сигналов датчиков, вырабатывающие дискретные сигналы вида «О или «1, логические элементы 24-36, ключи 37-42, которые коммутируют выходные сигналы, превращая их в импульсы регулируемой длительности и интенсивности следования
для стабилизации работы системы, развязывающие усилители 43-50 и исполнительные механизмы 51-54.
Для управления процессом пульпообразования в барже и его стабилизации часть размывочяой воды подают к верхнему коллектору 3, обеспечивающему равномерный размыв откоса песка по всей его ширине и препятствующему обрущениям откоса. коллектор 4 сзади сосуда в непосредственной близости
от днища трюма обеспечивает взвешивание песка в зоне всасывания, препятствуя его уносу за пределы этой зоны. При определенном соотнощении расходов воды между коллекторами обеспечиваются оптимальные условия
можно регулировать насыщение в зоне вса.сывания.
Развиваемая гидроперегружателем производительность по твердому материалу определяется транспортируюи ей способностью трубопроводов, которая, Б свою очередь, характеризуется вакуумом в верхней точке сифона (всасывающий трубопровод) и заилением на горизонтальном участке трубопровода. Область возможных режимов работы гидроперегружателя в связи с этим ограничивается предельно допустимым вакуумом, а также предельно допустимым слоем заиления в трубопроводе.
В предлагаемом устройстве сишал датчика вакуума 10 подается к преобразователям 16 и 17, где сравнивается -с заданными сигналами предельного и рабочего вакуума.
Вторая граница режимов работы задается сигналами датчиков рабочего 11 и аварийного 12 заиления в трубопроводе.
Логический автомат производит поиск и удержание системы в области, ограниченной рабочим и предельным вакуумом и рабочим и предельным заилением одновременно следующим образом.
Если вакуум и заиление меньше рабочего, автомат через элементы 16, 18, 24, 25, 26, 31 и 57 вырабатывает сигнал на увеличение скорости протяжки баржи посредством лебедки 7 на один щаг. При этом число оборотов насоса 1 остается неизменным.
Если вакуум больще рабочего, но меньше предельного, а слой заиления меньше рабочего, то логические элементы 16, 18, 25, 28, 32 и 40 вырабатывают сигнал «а уменьшение числа оборотов насоса 1 на один шаг, а скорость протяжки остается неизменной.
Если вакуум меньше рабочего, а слой заиления больше рабочего или критического, то через элементы 16, 18, 19, 24, 27, 29 и 30 число оборотов насоса увеличивается на один шаг при той же скорости протяжки.
Если вакуум больше предельного, скорость протяжки баржи через элементы 17 и 38 уменьшается на один шаг, а число оборотов не меняется.
Для устранения аварийных режимов логический автомат снабжен элем-ентом 30, вырабатывающим аварийный сигнал, если слой заиления выше критического или важуум выше предельного. При этом через элементы 31, 32, 33 и 36 запираются сигналы воздействий, препятствующих устранению аварии.
Для устранения аварии вырабатывается сигнал на увеличение расхода размывочной воды через верхний коллектор 3 путем дополнительного открытия задвижки 5 до заданного уровня. На задвижке выделяются два положения: рабочее, соответствующее нормальному соотношению расходов через коллекторы, и аварийное, -когда через верхний коллектор подается увеличенный расход воды для ликвидации высокого насыщения смеси в зоне всасывания.
Если задвижка находится в рабочьл положении (существует сигнал преобразователя 21) и появляется сигнал аварии от элемента 30, то логический автомат через элементы 2 и 34 вырабатывает воздействие на переход задвижки в аварийное положение до исчезновения сигнала от преобразователя 21.
При исчезновении сигнала аварии от элемента 30 и если задвижка находится в аварийяом положении (существует сигнал от преобразователя 20), через элементы 20 и 36 вырабатывается воздействие на возвращение задвижки в рабочее положение до исчезновения сигнала от преобразователя 20.
Для поддержания уровня воды в барже в заданных пределах на трубопроводе размывочной воды устанавливают задвижку 6, которая управляется через элементы 22, 23, 35, 41 v. 42 & зависимости от сигналов датчиков
уровня 14 и 15. При наличии сигнала от датчика 14 нижнего уровня логический автомат вырабатывает воздействие на открытие задвижки на один щаг. Если подан сигнал от датчика 15 верхнего
уровня, вырабатывается 1:;оздействие на закрытие задвижки на один шаг.
Таким образом, по описанному выше алгоритму осуществляется поиск области, соответствующей режиму работы с наибольшей производительностью по твердому материалу. Нахождению системы в этой области соответствует такое сочетание входных сигналов от преобразователей 16-19, при котором не вырабатываются никакие регулирующие воздействия «а исполнительные механизмы 51 и 54.
Предмет изобретения
1. Устройство для автоматического управления гидроперегружателем, содержащее датчики вакуума, датчики заиления, развязывающие усилители, грунтовой и размьгвочный насосы с приводами и две |регулируемые задвижки на размывочных трубопроводах с приводами, отличающееся тем, что, с целью повыщения его надежности при обеспечении максимальной производительности гндроперегружателя по твердому материалу, в нам дополнительно установлены датчики воды в барже, датчики положения задвижек и логическое устройство с входными преобразователями «непрерывный/дискретный по числу всех датчиков гидроперегружателя, подключенных к
логическому устройству, и выходы логического устройства через соответствующие развязывающие усилители подключены к приводу грунтового насоса, приводу размывочного насоса и приводам задвижек.
2. Устройство по п. 1, отличающееся тем, что, с целью обеспечения устойчивости работы в переход ных режимах, в логическом устройстве установлены ключи, превращающие выходные сигналы в импульсы регулируемой
2
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гидравлической выгрузки сыпучих грузов из судов | 1985 |
|
SU1382770A1 |
| Гидроперегружатель | 1980 |
|
SU906875A1 |
| Гидроперегружатель сыпучих материалов из судов | 1989 |
|
SU1787915A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ВЗРЫВА ПЫЛЕМЕТАНОВОЗДУШНОЙ СМЕСИ В КОМПЛЕКСНО-МЕХАНИЗИРОВАННОМ ЗАБОЕ | 2010 |
|
RU2459958C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ТРУБОПРОВОДА | 2012 |
|
RU2534397C2 |
| СПОСОБ УПРАВЛЕНИЯ ФОНТАННОЙ АРМАТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2596175C1 |
| Устройство для управления гидроподъемной системой | 1989 |
|
SU1655886A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ НАСОСНОЙ СТАНЦИИ | 2013 |
|
RU2551139C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРОЙ КУСТА СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2646901C1 |